1.本公开涉及一种使用连续绳环的用于展开和收回窗口覆盖物的系统,更具体地,涉及一种用于展开和收回窗口覆盖物的系统的外部电机驱动设备。
背景技术:
2.用于展开和收回用于例如窗口、拱门等建筑开口的覆盖物的窗口覆盖物系统是常见的。用于展开和收回该窗口覆盖物的系统可以例如通过升起和降下覆盖物,或者通过横向地打开和关闭覆盖物来运行。(在此,根据上下文,如下术语都被使用,所述术语为展开和收回、打开和关闭、升起和降下窗口覆盖物)。该窗口覆盖物系统通常包括顶轨或盒子,顶轨或盒子中主要限制了用于覆盖物的工作部件。在一些变体中,窗口覆盖物系统包括平行于顶轨延伸的底轨,以及某种形式的遮光物材料,该遮光物材料可以是织物或遮光物或百叶窗材料,该遮光物材料将顶轨和底轨互相连接。遮光物或百叶窗材料随底轨在展开位置和收回位置之间相对于顶轨移动。例如,当底轨相对于顶轨降下或升起时,织物或其他材料从顶轨展开或朝向顶轨收回,以便该织物或其他材料可以聚集在顶轨附近或顶轨内部。该机构可以包括不同的控制设备,例如悬挂在顶轨的一端或两端的拉绳。拉绳可以线性悬挂,或者在本发明所涉及的窗口覆盖物系统的类型中,拉绳可以采取柔性材料(例如绳索、绳子或珠状链条)的闭环的形式,在此被称为连续绳环,或者替代地被称为链条/绳子。
3.在一些情况下,窗口覆盖物系统包括电机和控制电子设备,该电机致动用于展开和收回百叶窗或遮光物材料的机构。最常见地,电机和控制电子设备被安装在窗口覆盖物的顶轨内,或者被安装在管子内(有时被称为管状电机),从而避免了对拉绳(例如连续绳环)的需要。使用该电机运行系统或设备,遮光物或百叶窗材料可以通过用户致动或者通过(例如由开关或光电管触发的)自动运行来展开或收回。在该窗口覆盖物系统中,电机和控制电子设备已经被安装在顶轨内,在此,该窗口覆盖物系统有时被称为“内部电机”、“内部电机设备”或“内部电机系统”。
4.本发明的驱动系统包括电机和控制电子设备,该电机和控制电子设备被安装在用于展开和收回遮光物或百叶窗材料的机构的外部。在此,该驱动系统被称为“外部电机”、“外部电机设备”或“外部电机系统”,或者替代地,有时被称为“外部致动器”。外部电机系统通常被安装在窗框或墙壁的外部,并且与窗口覆盖物的绳子或链条(连续绳环)接合,以便自动打开和关闭百叶窗。
5.在内部电机系统和外部电机系统(在此,有时被统称为机动系统)中,自动驱动系统包括控制电子设备以控制运行。通常地,机动系统通过用户控制机构进行控制,该用户控制机构包括rf(radio frequency,射频)控制器或其他远程控制器,该rf控制器或其他远程控制器用于与电机相关联的驱动系统进行无线通信。该远程用户控制系统采取了不同的形式,例如,手持式远程控制设备、壁挂式控制器/开关、智能家庭集线器、建筑物自动化系统和智能电话等。特别地,该远程控制设备的使用与内部电机系统密切相关,其中,很难或不可能将用户控制设备集成在内部安装的驱动系统内。
6.在本公开的外部电机驱动系统中,由于外部致动器与顶轨或其他窗口覆盖物机构分离,这为将用户控件集成到外部致动器本身开辟了新的可能性。在此,这些集成控制特征有时被称为“设备上控件(on
‑
device control)”。外部电机系统的设备上控件提供了不同的优点,例如运行简单、以及便于访问控制设备和执行控制功能。该外部电机系统的设备上控件可以通过适当的传感器、分布式智能和网络通信与自动控制系统集成。
7.自动控制窗口覆盖物系统可以提供不同的有用的控制功能。该自动窗口控制功能的示例包括校准百叶窗的打开和关闭以满足用户的偏好,以及以协调或集中的方式控制多个百叶窗。在用于外部致动器的设备上控件中,需要有效地集成不同的自动窗口控制功能。
技术实现要素:
8.在此描述的实施例包括电机驱动系统,该电机驱动系统用于运行用于展开和收回窗口覆盖物的机构。电机驱动系统包括在电力下运行的电机和驱动组件。电机驱动系统响应来自控制器的位置指令来推进连续绳环。一种用于控制器的输入
‑
输出设备,该输入
‑
输出设备包括输入接口和可视化显示器,该输入接口沿输入轴线接收用户输入,该可视化显示器与输入接口的输入轴线对齐。在实施例中,输入
‑
输出设备包括电容式触摸条和led条,该电容式触摸条沿输入轴线接收用户输入,该led条与输入轴线对齐。
9.在实施例中,输入
‑
输出设备在用于电机驱动系统的壳体的外部竖直地延伸,并且壳体支撑输入按钮。在实施例中,壳体上的按钮包括组模式模块和设置控制模块。在另一实施例中,壳体支撑rf通信按钮。
10.在实施例中,组模式模块将位置指令传送到所识别的组内的其他电机驱动系统,以运行其他电机驱动系统的相应的其他机构。在实施例中,组模式模块使得rf通信模块将位置指令传送到其他电机驱动系统。在实施例中,所识别的组内的其他电机驱动系统根据对其他电机驱动系统中的每一个的相应的顶部位置和相应的底部位置的校准来运行相应的其他机构。
11.在实施例中,设置控制模块使得用户能够校准窗口覆盖物行进的顶部位置和底部位置。在实施例中,在校准期间,用户利用输入接口将窗口覆盖物分别移动到顶部位置和底部位置,并且按下设置按钮来设置这些位置。
12.在实施例中,驱动组件包括从动轮和电力连接机构,该从动轮被配置为用于接合和推进连续绳环,该连续绳环被耦接到用于升起和降下窗口覆盖物的机构,该电力耦接机构将从动轮耦接到电机的输出轴,并且被配置为用于使从动轮沿第一指向(sense)和第二指向旋转。从动轮沿第一指向的旋转使得连续绳环沿第一方向推进,以及从动轮沿第二指向的旋转使得连续绳环沿第二方向推进。控制器向电机和电力耦接机构提供位置指令,以控制从动轮沿第一指向和第二指向的旋转。
13.在实施例中,除了经由外部电机设备的设备上控件向电机和驱动组件提供位置指令和其他控制指令之外,这些指令还可以由与外部电机设备的设备上控件分离的输入
‑
输出(i/o)设备来提供,例如由移动用户设备提供。在实施例中,控制系统包括网络应用程序,该网络应用程序可以模拟外部电机的设备上控件的各种单轴线输入特征和单轴线显示特征。
14.在实施例中,外部电机设备被配置为例如在卷式遮光物和罗马式遮光物中经由竖
直位置控制来升起或降下窗口覆盖物。在实施例中,外部电机设备被配置为经由水平位置控制,例如在竖直的百叶窗或窗帘中横向地打开或关闭窗口覆盖物(例如,横过窗框)。在实施例中,控制系统包括图形用户界面,该图形用户界面被配置为显示输入控制,该输入控制根据由外部电机驱动的窗口覆盖物系统的类型来竖直或水平地延伸。
15.在实施例中,电机驱动系统包括电机和驱动组件,该电机被配置为在电力下运行以使电机的输出轴旋转,其中,电机是在用于升起和降下窗口覆盖物的机构的外部;该驱动组件被配置为接合和推进连续绳环,该连续绳环被耦接到用于升起和降下窗口覆盖物的机构。沿第一方向推进连续绳环使窗口覆盖物升起,以及沿第二方向推进连续绳环使窗口覆盖物降下。电机驱动系统包括控制器,该控制器用于向电机和驱动组件提供位置指令,以控制连续绳环沿第一方向的推进和连续绳环沿第二方向的推进。用于控制器的输入
‑
输出设备包括输入接口和可视化显示器,该输入接口沿输入轴线接收用户输入,使得控制器向电机和驱动组件提供位置指令,该可视化显示器与输入接口的输入轴线对齐。
16.在不同的实施例中,外部电机驱动器在电机从空闲状态过渡到全速运行期间以及在电机从全速运行过渡返回到空闲状态期间执行速度控制程序。电机驱动系统包括控制器和电机控制器,该控制器提供位置信号,该电机控制器用于为电机提供动力。控制器和电机控制器被配置为执行电机的斜坡轨迹速度控制,该电机的斜坡轨迹速度控制限制了电机的从空闲状态到全速运行的加速度,以及限制了电机的从全速运行返回到空闲状态的减速度。观察电机速度的斜坡轨迹控制以减少或避免在连续绳环驱动系统上的应力,该应力可能拉伸、削弱或以其他方式损坏连续绳环(例如绳索、绳子或珠状链条)。
17.在实施例中,用于窗口覆盖物的外部电机驱动器的控制系统包括子系统,该子系统用于管理太阳能加热效应。在不同的实施例中,该控制子系统与系统传感器(例如光传感器和温度传感器)、外部数据源和其他数据源协调,以基于多个阳光进入条件来调节窗口覆盖物的位置控制。阳光进入条件包括,例如,光传感器输出和温度传感器输出、天气条件、一天中的时间、窗口覆盖物的位置以及可能影响太阳热量增益的其他参数。在实施例中,在控制系统确定由控制器接收的多个阳光进入条件对应于一个或多个窗口覆盖标准的情况下,控制器使驱动组件展开窗口覆盖物,在控制系统确定由控制器接收的多个阳光进入条件对应于一个或多个窗口打开标准的情况下,控制器使驱动组件收回窗帘。
18.在实施例中,用于与窗口覆盖物系统一起使用的驱动系统包括顶轨、与顶轨相关联的机构、以及连续绳环,该与顶轨相关联的机构用于展开和收回窗口覆盖物,该连续绳环在顶轨的下方延伸,以用于致动用于展开和收回窗口覆盖物的机构,该驱动系统包括电机、驱动组件、控制器以及用于控制器的输入
‑
输出设备,该电机被配置为使电机的输出轴旋转;该驱动组件被配置为接合和推进连续绳环,该连续绳环耦接到用于展开和收起窗口覆盖物的机构,其中,沿第一方向推进连续绳环以展开窗口覆盖物,以及沿第二方向推进连续绳环以收回窗口覆盖物;该控制器用于向电机和驱动组件提供位置指令,以控制连续绳环沿第一方向的推进和连续绳环沿第二方向的推进;该输入
‑
输出设备包括输入接口,该输入接口沿输入轴线接收用户输入,以使控制器向电机和驱动组件提供位置指令,该输入
‑
输出设备进一步包括可视化显示器,该可视化显示器与输入接口的输入轴线对齐;其中,驱动组件和控制器以竖直模式和水平模式中的一种模式进行运行;其中,在竖直模式中,驱动组件被配置为沿第一方向推进连续绳环以降下窗口覆盖物,并且被配置为沿第二方向推进连续
绳环以升起窗口覆盖物,并且可视化显示器和输入接口的输入轴线竖直地对齐;并且其中,在水平模式中,驱动组件被配置为沿第一方向推进连续绳环以横向地关闭窗口覆盖物,并且被配置为沿第二方向推进连续绳环以横向地打开窗口覆盖物,并且可视化显示器和输入接口的输入轴线水平地对齐。
19.在另一实施例中,用于与窗口覆盖物系统一起使用的驱动系统包括用于展开和收回窗口覆盖物的机构以及连续绳环,该连续绳环在用于展开和收回窗口覆盖物的机构的下方延伸,该驱动系统包括电机、驱动组件、温度传感器、光传感器和控制器,该电机被配置为使电机的输出轴旋转;该驱动组件被配置为接合和推进连续绳环,该连续绳环耦接到用于展开和收回窗口覆盖物的机构,其中,沿第一方向推进连续绳环以展开窗口覆盖物,以及沿第二方向推进连续绳环以收回窗口覆盖物;该温度传感器通信地耦接到控制器,该控制器用于向电机和驱动组件提供位置指令,其中,温度传感器被配置为提供代表驱动系统附近的温度的温度输出;该光传感器通信地耦接到控制器,该控制器用于向电机和驱动组件提供位置指令,其中,光传感器被配置为提供代表驱动系统附近的环境光强度的光输出;该控制器用于向电机和驱动组件提供位置指令,以控制连续绳环沿第一方向的推进和连续绳环沿第二方向的推进;其中,控制器接收包括温度输出和光输出的多个阳光进入条件,其中,在由控制器接收的多个阳光进入条件对应于一个或多个窗口覆盖标准的情况下,控制器使驱动组件沿第一方向推进连续绳环以展开窗口覆盖物,并且在由控制器接收的多个阳光进入条件对应于一个或多个窗口打开标准的情况下,控制器使驱动组件沿第二方向推进连续绳环以收回窗口覆盖物。
20.在另一实施例中,用于控制电机驱动设备的方法包括:由处理器经由计算设备的图形用户界面接收用于从至少一个竖直窗口覆盖物机构和至少一个水平窗口覆盖物机构中选择窗口覆盖物机构的请求,该竖直窗口覆盖物机构被配置为用于经由电机驱动设备来升起和降下窗口覆盖物,该水平窗口覆盖物机构被配置为用于经由电机驱动装置横向地打开和关闭窗口覆盖物;由处理器经由计算设备的图形用户界面显示至少一个竖直窗口覆盖物机构和至少一个水平窗口覆盖物机构的图形表示,并且接收至少一个竖直窗口覆盖物机构和至少一个水平窗口覆盖物机构中的一个窗口覆盖物机构的选择;响应所接收到的至少一个竖直窗口覆盖物机构和至少一个水平窗口覆盖物机构中的一个窗口覆盖物机构的选择,如果所选择的窗口覆盖物机构是至少一个竖直窗口覆盖物机构中的一个竖直窗口覆盖物机构,则经由图形用户界面显示具有输入轴线的位置控制可视化显示,其中,输入轴线被竖直地对齐;如果所选择的窗口覆盖物机构是至少一个水平窗口覆盖物机构中的一个水平窗口覆盖物机构,则经由图形用户界面显示具有输入轴线的位置控制可视化显示,其中,输入轴线被水平地对齐;以及响应经由具有输入轴线的位置控制可视化显示接收到的位置控制输入,由处理器向电机驱动设备输出基于位置控制输入的位置控制指令。
21.在另一实施例中,电机驱动系统包括电机、驱动组件、控制器,该电机被配置为在电力下运行以使电机的输出轴旋转,其中,电机是在用于升起和降下窗口覆盖物的机构的外部;该驱动组件被配置为接合和推进连续绳环,该连续绳环耦接到用于升起和降下窗口覆盖物的机构,其中,沿第一方向推进连续绳环使窗口覆盖物升起,以及沿第二方向推进连续绳环使窗口覆盖物降下;该控制器用于向电机和驱动组件提供位置指令,以控制连续绳环沿第一方向的推进和连续绳环沿第二方向的推进;其中,驱动组件包括电力耦接机构和
电机控制器,该电力耦接机构将驱动组件耦接到电机的输出轴,并且被配置为使从动轮沿第一指向和第二指向旋转,该电机控制器用于向电力耦接机构提供动力;其中,控制器和电机控制器被配置为执行电机的斜坡轨迹速度控制,该电机的斜坡轨迹速度控制限制了电机的从空闲状态到全速运行的加速度,以及限制了电机的从全速运行返回到空闲状态的减速度。
22.在实施例中,用于与窗口覆盖物系统一起使用的驱动系统包括顶轨、与顶轨相关联的机构、以及连续绳环,该与顶轨相关联的机构用于展开和收回窗口覆盖物,该连续绳环在顶轨的下方延伸,以用于致动用于展开和收回窗口覆盖物的机构,该驱动系统包括电机、驱动组件、控制器和用于控制器的输入
‑
输出设备,该电机被配置为使电机的输出轴旋转;该驱动组件被配置为接合和推进连续绳环,该连续绳环耦接到用于展开和收回窗口覆盖物的机构,其中,沿第一方向推进连续绳环将窗口覆盖物展开,以及沿第二方向推进连续绳环将窗口覆盖物收回;该控制器被配置为向电机和驱动组件提供位置指令,以控制连续绳环沿第一方向的推进和连续绳环沿第二方向的推进;该输入
‑
输出设备包括图形用户界面,该图形用户界面被配置为接收用户输入,使控制器沿第一方向或第二方向中的选定方向以推进连续绳环的选定速度控制电机和驱动组件的位置指令,其中,在第一速度控制模式中,输入
‑
输出设备使控制器在从静止速度到最大速度的速度范围内以选定的百分比来控制推进连续绳环的速度,以及在第二速度控制模式中,输入
‑
输出设备使控制器以有限数量的预定速度水平中的选定的预定速度水平来控制推进连续绳环的速度。
23.在实施例中,电机驱动系统包括第一电机、驱动系统、控制器、rf通信模块和组模式模块,该第一电机被配置为在电力下运行以使电机的输出轴旋转,其中,第一电机是在用于升起和降下窗口覆盖物的第一机构的外部;该驱动系统被配置为接合和推进连续绳环,该连续绳环耦接到用于升起和降下窗口覆盖物的第一机构,其中,沿第一方向推进连续绳环使窗口覆盖物升起,以及沿第二方向推进连续绳环使窗口覆盖物降下;该控制器用于向第一电机和第一电动驱动系统提供位置指令,以控制连续绳环沿第一方向的推进和连续绳环沿第二方向的推进;该rf通信模块可运行地耦接到控制器,该控制器用于控制位置指令到其他电机驱动系统的网络的rf通信,用于运行相应的其他机构,该其他机构用于升起和降下相应的其他窗口覆盖物;该组模式模块用于识别包括在用户选择组中的其他电机驱动系统中的一个或多个,并且用于使rf通信模块将位置指令传送到所识别的其他电机驱动系统中的一个或多个。
24.在实施例中,电机驱动系统包括电机、驱动组件、控制器和设置控制模块,该电机被配置为在电力下运行以使电机的输出轴旋转,其中,电机是在用于升起和降下窗口覆盖物的机构的外部;该驱动组件被配置为接合和推进连续绳环,该连续绳环耦接到用于升起和降下窗口覆盖物的机构,其中,沿第一方向推进连续绳环使窗口覆盖物升起,以及沿第二方向推进连续绳环使窗口覆盖物降下;该控制器用于向电机和驱动组件提供位置指令,以控制连续绳环沿第一方向的推进和连续绳环沿第二方向的推进;该设置控制模块用于用户校准窗口覆盖物的顶部位置和底部位置,其中,在用户校准之后,控制器限制窗口覆盖物在顶部位置和底部位置之间的升起和降下。
25.实施例的附加特征和优点将在以下描述中阐述,并且部分附加特征和优点将从描述中变得显而易见。本发明的目的和其他优点将通过在书面描述和本文的权利要求书以及
附图中的示例性实施例中特别指出的结构来实现和获得。
26.应当理解,前述的一般描述和以下的详细描述都是示例性和解释性的,并且旨在提供对所要求的发明的进一步解释。
附图说明
27.本公开的非限制性实施例通过示例的方式参照附图来进行描述,附图是示意性的并且不旨在按比例绘制。除非表明代表背景技术,否则附图代表本公开的方面。
28.图1是外部电机设备的等距视图。
29.图2是根据图1的实施例的外部电机设备的被分解的部件的分解视图。
30.图3是根据实施例的具有处于打开位置的链轮盖的外部电机设备的等距视图。
31.图4是根据图1的实施例,在穿过链轮的截面中,从后部看到的外部电机设备的正视图。
32.图5是根据实施例的安装在平面墙壁上的具有外部电机系统的窗口覆盖物系统的透视图。
33.图6是根据图5的实施例的用于窗口覆盖物系统的安装的外部电机系统的透视图。
34.图7是根据实施例的用于窗口覆盖物系统的外部电机设备的控制系统架构的方框图。
35.图8是根据实施例的用于窗口覆盖物系统的外部电机控制系统的监测和控制变量的示意图。
36.图9是根据图1的实施例的用于外部电机系统的被分解的电机驱动部件的正视图。
37.图10是根据实施例的用于外部电机控制系统的校准例程的流程图。
38.图11是根据实施例的遮光物控制例程的流程图。
39.图12是根据实施例的组模式例程的流程图。
40.图13是根据实施例的分组网状例程的流程图。
41.图14是根据另一实施例的外部电机设备的等距视图。
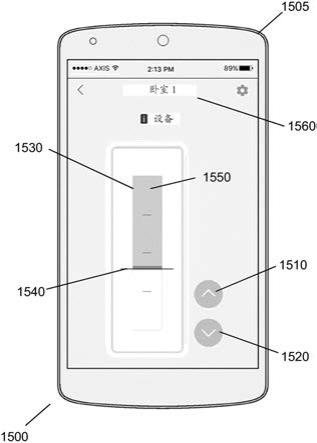
42.图15是根据实施例的显示在电子设备上的图形用户界面的前视图,该图形用户界面呈现外部电机控制应用程序的位置控制屏幕。
43.图16是根据实施例的显示在电子设备上的图形用户界面的前视图,该图形用户界面呈现外部电机控制应用程序的窗口覆盖物类型设置屏幕。
44.图17是根据实施例的显示在电子设备上的图形用户界面的前视图,该图形用户界面呈现外部电机控制应用程序的窗口覆盖物设备选择屏幕。
45.图18是根据实施例的显示在电子设备上的图形用户界面的前视图,该图形用户界面呈现外部电机控制应用程序的位置控制屏幕。
46.图19是根据实施例的太阳热量增益管理系统的方框图。
47.图20是根据实施例的电机斜坡轨迹状态机的示意图。
48.图21是根据另一实施例的外部电机设备的等距视图。
49.图22是根据实施例的显示在电子设备上的图形用户界面的前视图,该图形用户界面呈现外部电机控制应用程序的速度控制屏幕。
具体实施方式
50.在此,参考附图中示出的实施例来详细描述本公开,这些实施例形成了本公开的一部分。在不脱离本公开的精神或范围的情况下,可以使用其他实施例和/或可以进行其他改变。在具体实施方式中描述的说明性实施例并不意味着限制在此呈现的主题。此外,在不脱离本发明的精神或范围的情况下,本文描述的不同部件和实施例可以结合,以形成未明确描述的附加实施例。
51.现在,将参考附图中所示的示例性实施例,并且在此,将使用特定的语言来描述这些实施例。然而,应当理解,本发明的范围并不因此而受到限制。在此说明的本发明的特征的改变和进一步修改,以及在此说明的本发明的原理的附加应用,对于相关领域的技术人员和拥有本公开的人而言,将在本发明的范围内被考虑。
52.本公开描述了用于控制窗口覆盖物系统的运行的外部电机设备的不同的实施例。在不同的实施例中,外部电机设备采用设备上控件、采用单独的控制设备(例如,移动计算设备)或者两者同时采用。如在本公开中所使用的,“窗口覆盖物系统”是用于展开和收回或升起和降下窗口覆盖物的系统。在图5中所示的实施例200中,窗口覆盖物系统包括顶轨202和与顶轨相关联的机构(未示出)(即,顶轨内或邻近顶轨的机构),该机构用于展开和收回窗口覆盖物。在该实施例中,窗口覆盖物系统200包括连续绳环220,该连续绳环在顶轨的下方延伸,用于致动与顶轨相关联的机构,以展开和收回窗口覆盖物。如在本公开中所使用的,“顶轨”是窗口覆盖物系统的结构的广义术语,该结构包括用于展开和收回窗口覆盖物的机构。该窗口覆盖物系统进一步包括外部电机210。连续绳环220可运行地将与顶轨202相关联的窗口覆盖物机构耦接到外部电机210,以升起或降下窗口遮光物(织物或百叶窗)204。如图6所示,外部电机210被安装到靠近窗口的墙壁206,在该视图中,窗口被遮光物204覆盖。例如,可以使用例如螺栓214的硬件或者使用例如图2中的支架194的安装夹具将外部致动器安装到墙壁206。
53.在本公开中,“窗口覆盖物”包括可以使用连续绳环系统(即,具有用于使用连续绳环来展开和收回窗口覆盖物的机构的系统)来展开和收回以覆盖窗口或其他建筑开口的任何覆盖物材料。该窗口覆盖物包括大多数遮光物材料和百叶窗材料以及其他覆盖物材料,例如:卷式遮光物、蜂窝状遮光物、水平透明遮光物、百褶式遮光物、编织木遮光物、罗马式遮光物、活动百叶窗(venetian blinds)、遮光物(pirouette是德国鹿特丹市亨特道格拉斯公司的商标)、以及一些用于打开和关闭窗帘和帏帐的系统。本文描述的窗口覆盖物的实施例是指一个或多个百叶窗,可以理解,这些实施例是对其他形式的窗口覆盖物的说明。
54.如在本公开中所使用的,“连续绳环”是柔性材料的连续环,柔性材料例如为绳索、绳子、珠状链条和球状链条。呈绳环形式的绳环具有不同的类型和直径范围,包括例如d
‑
30(1 1/8
”‑
1 1/4”)、c
‑
30(1 3/16
”‑
1 7/16”)、d
‑
40(1 3/16
”‑
1 7/16”)、和k
‑
35(1 1/4
”‑
1 1/2”)。此外,不同类型的珠状链条和球状链条通常用作用于窗口覆盖物系统的连续绳环。通常,球状链条的直径是5mm(0.2英寸)。在通常的窗口覆盖物系统设计中,连续绳环包括在顶轨处的第一环端和远离顶轨的第二环端,该第一环端接合与顶轨相关联的机构,该机构用于展开和收回窗口覆盖物。连续绳环有不同的绳环长度(即,第一环端和第二环端之间的长度),该绳环长度有时四舍五入到最近的英尺。在一个实施例中,例如,在卷式百叶窗系统
中,连续绳环在顶轨和第二环端之间延伸,但不延伸横跨顶轨。在该实施例中,第一环端可以环绕离合器,该离合器是展开和收回百叶窗的机构的一部分。在另一个实施例中,例如,在竖直百叶窗系统中,连续绳环的部段延伸横跨顶轨。在实施例中,连续绳环以基本上竖直的定向在顶轨的下方延伸。当改装当前外部电机设备以控制先前安装的窗口覆盖物系统时,连续绳环可以是先前安装的窗口覆盖物机构的一部分。替代地,用户可以将连续绳环改装到先前安装的窗口覆盖物机构。
55.连续绳环系统可以通过升起和降下、横向地打开和关闭、或通过其他移动来展开和收回窗口覆盖物,该其他移动展开窗口覆盖物以覆盖建筑开口并且收回窗口覆盖物以露出建筑开口。本文描述的实施例通常是指在外部电机系统的控制下或手动地升起和降下百叶窗,可以理解,这些实施例说明了用于展开和收回窗口覆盖物的其他运动。外部致动器210包括电机驱动系统和控制电子设备,用于使连续绳环220沿两个方向中的一个方向自动移动以升起或降下百叶窗204。在窗口覆盖物系统200的一个实施例中,连续绳环220包括后绳/链224和前绳/链222。在该实施例中,拉下前绳以升起(收回)百叶窗,以及拉下后绳以降下(展开)百叶窗。如在本公开中所使用的,“推进”连续绳索环意味着使连续绳环沿任一方向移动(例如,向下拉连续绳环的前绳或向下拉连续绳环的后绳)。在实施例中,当连续绳环被释放时,百叶窗自动停止并且锁定就位。在实施例中,当处于百叶窗的底部时,连续绳环的后绳可以用于打开百叶窗中的任何叶片,而前绳可以用于关闭这些叶片。
56.如图1的等距视图所示,外部电机100通常对应于图5、图6的外部电机210,该外部电机包括壳体102,壳体中容置有电机、相关联的驱动机构和控制电子设备。外部致动器100包括不同的设备上控件,这些设备上控件用于用户的输入和输出。例如,外部致动器100可以包括触摸条104(也被称为滑动条或led条)。在所示的实施例中,触摸条104包括单轴线输入设备和单轴线可视化显示器。外部致动器100进一步包括不同的按钮输入,该按钮输入包括电源按钮106和一组控制按钮110,该电源按钮位于壳体的前部,该一组控制按钮位于壳体的顶部。在实施例中,控制按钮110包括rf按钮112、set按钮114和group按钮116。
57.在实施例中,按钮106、110是物理的(可移动的)按钮。按钮可以凹入壳体102内或者可以凸出到壳体102的表面上。代替或除了图1所示的触摸条和物理按钮以外,输入控件可以包括任何适当的输入机构,该输入机构能够使电路中的电触点闭合、或断开电路、或改变电路的电阻或电容、或引起电路或电子例程的其他状态改变。
58.在不同的实施例中,可以采用替代的或附加的输入设备,例如不同类型的传感器(例如,手势传感器或其他生物识别传感器、加速度传感器、光传感器、温度传感器、触摸传感器、压力传感器、运动传感器、接近传感器、存在传感器、电容式传感器和红外传感器)。其他用户输入机构包括触摸屏按钮、全息按钮、语音激活设备、音频触发器、继电输入触发器或电子通信触发器,以及包括这些输入机构的组合的其他可能性。图14示出了替代的外部电机1000,该替代的外部电机包括通常与电机100的输入设备对应的输入设备1004、1006、1012、1014和1016。此外,外部电机1000包括二维屏幕1008,该二维屏幕位于外部电机1000的前表面上、led条1004的上方、电源按钮1006的下方。二维屏幕1008可以是触摸屏,并且可以提供不同的输入/输出功能,例如虚拟键盘、字母数字显示器和图形用户界面等。
59.再次参考图1,外部电机100的输入接口可以识别不同的用户输入手势,以生成用于打开或关闭窗口覆盖物的指令以及其他系统功能。这些手势包括打字式手势(例如触摸、
按压、推动、敲击、双击、两指敲击)、用于追踪图案的手势(例如滑动、挥动和手部运动控制)、以及多点触摸手势(例如在电容式触摸条104上捏住特定的点)。在例如图14的触摸屏1008的二维用户界面的情况下,可以采用额外的用户手势,例如多点触摸旋转和二维图案追踪。在实施例中,二维输入接口1008可以包括单轴线控件,该单轴线控件沿输入轴线接收用户输入。
60.本外部电机的设备上控件包括遮光物位置控制输入
‑
输出(i/o)设备,例如滑动条104。滑动条104沿i/o设备的输入轴线在壳体102上竖直地延伸。在将给定的输入映射到指令生成器中的遮光物控制功能时,滑动条104的竖直度自然地对应于遮光物定位的物理属性,从而提供直观的且人性化的控制功能。经由滑动条104实现的遮光物控制i/o定位功能的示例包括:
61.(a)将在滑动条104的底部和顶部之间的给定的滑动条位置处的手势对应于由编码器或其他传感器测量的百叶窗的给定绝对位置(高度);
62.(b)将在滑动条104的底部和顶部之间的给定的位置处的手势对应于百叶窗的给定相对位置,该百叶窗的给定相对位置相对于设置的底部位置和设置的顶部位置之间的校准距离(例如,距滑动条104的底部25%处的手势对应于从设置的底部位置到设置的顶部位置的校准距离的25%的、百叶窗的位置)。
63.(c)滑动条104的顶部和底部处的手势可以根据手势执行不同的遮光物控制功能。按住滑动条104的顶部是使百叶窗连续向上移动的指令,同时,按住滑动条104的底部是使百叶窗连续向下移动的指令。敲击滑动条104的顶部是使百叶窗移动到其顶部位置的指令,同时,敲击滑动条104的底部是使百叶窗移动到其底部位置的指令。
64.(d)滑动条104上的向上和向下的动态手势(例如,滑动)可以被分配不同的功能,例如“向上”和“向下”,或“开始”和“停止”。
65.滑动条104提供了多功能的输入
‑
输出设备,该输入
‑
输出设备非常适合于窗口覆盖物电机驱动系统的不同控制功能。不同的遮光物控制功能可以基于与触摸条104相关联的单轴线定量方案,例如在触摸条的底部为0%以及在触摸条104的顶部为100%的百分比比例。例如,滑动条104经由预先设置的控制选项,可以用于设置不同开放水平下的百叶窗的位置,不同开放水平例如为0%打开(或关闭)、25%打开、50%打开、75%打开或100%(完全)打开。用户可以通过滑动、敲击或按压滑动条上的不同的点,经由滑动条104来命令这些开放水平。此外,滑动条指令方案可以包括用于状态变化的边界位置。例如,滑动条四分之一位置下方的滑动条输入可以命令窗口覆盖物从25%打开到0%打开,以关闭窗口覆盖物。
66.滑动条104的不同功能可以采用滑动条的单轴线输入感测特征和单轴线显示特征的结合。例如,led条140可以沿着触摸条104照亮一些位置,其中,这些被照亮的位置对应于沿着滑动条的边界,以用于遮光物指令结构中的状态变化。
67.在图21的外部电机设备2100中,竖直触摸条输入设备被电容式触摸按钮2110、2120、2130替代,用于不同的运动状态。触摸按钮2110启动向上运动,触摸按钮2120启动向下运动,并且触摸按钮2130启动空闲(静止)运动状态。例如,按压向上按钮或向下按钮可以导致连续的向上或向下移动,敲击按钮可以导致窗口覆盖物位置向上或向下移动到下一个设置位置,以及双击按钮可以导致窗口覆盖物位置移动到顶部或底部的校准位置。
68.上述用于外部电机设备的设备上控件的输入
‑
输出原理可以应用于与外部电机设
备的设备上控件分离的不同类型的遮光物位置控制输入
‑
输出(i/o)设备,例如移动用户设备。在不同的实施例中,网络应用程序模拟上述外部电机的设备上控件的单轴线输入感测特征和单轴线显示特征。在不同的实施例中,网络应用程序利用移动设备输入技术,例如触摸屏输入、基于手势的输入以及gps位置感测。例如,网络应用程序控件可以接受输入(例如拖动、敲击、双击、多点触摸输入)和手势(例如追踪图案、滑动、挥动和手部运动控制)。在不同的实施例中,例如2d触摸屏的二维i/o设备可以被配置为沿单个轴线(例如,沿触摸屏的竖直轴线或水平轴线)对用户输入起作用。
69.图15
‑
图18和图22是显示在电子设备1505(例如,移动电子设备)上的图形用户界面的前视图,该图形用户界面呈现了外部电机控制应用程序的不同屏幕。图15的窗口覆盖物应用程序的位置控制屏幕1500包括具有线1540的竖直滑动条控件1530,该竖直滑动条控件可以经由触摸屏输入将线设置在期望的竖直位置。此外,图形用户界面1500包括向上按钮控件1510和向下按钮控件1520,这些控件可以接收不同类型的触摸屏输入。例如,按压按钮可以导致连续的向上或向下移动,敲击按钮可以导致窗口覆盖物位置向上或向下移动到下一个设置位置(例如,设置位置为75%),以及双击按钮可以导致窗口覆盖物位置移动到顶部或底部的校准位置。
70.图16的窗口覆盖物应用程序的设置屏幕1600是用于根据安装有外部电机控制的窗口覆盖物设备的一个或多个类型来设置外部电机控制的应用程序。窗口覆盖物设备类型选项包括卷式遮光物1610、竖直百叶窗1620、窗帘或帷帘1630和罗马式遮光物1640。卷式遮光物1610和罗马式遮光物1640的特征在于通过竖直位置控制,即,外部电机设备升起或降下卷式遮光物或罗马式遮光物。竖直百叶窗1620和窗帘或帷帘1630的特征在于通过水平位置控制,即,外部电机设备横向地打开或关闭竖直百叶窗或窗帘,例如,横跨窗框。
71.如图17所示的窗口覆盖物应用程序的选择屏幕1700,外部电机控制应用程序可以被设置为控制两个或多个外部电机控制设备,例如,在不同的房间中或在给定的房间中的多个设备。在设置之后,用户可以经由设备选择屏幕1700选择这些设备中的一个设备进行控制。在示例性实施例中,用户设置了两个外部电机窗口覆盖物设备:在卧室1的卷式遮光物设备1730和在卧室2的窗帘或帷帘设备1740。用户已经经由单选按钮1710选择了设备1730以使用窗口覆盖物应用程序来进行控制。替代地,用户可以经由单选按钮1720选择设备1740。在不同的实施例中,在选择屏幕1700选择的外部电机控制设备与卷式遮光物1610或罗马式遮光物1640相关联的情况下,窗口覆盖物应用程序将显示被配置为竖直位置控制的位置控制应用程序屏幕。在不同的实施例中,在选择屏幕1700选择的外部电机控制设备与竖直百叶窗1620或窗帘或帷帘1630相关联的情况下,窗口覆盖物应用程序将显示被配置为水平位置控制的位置控制应用程序屏幕。
72.在图15的使用窗口覆盖物应用程序的位置控制屏幕1500示例中,用户在选择屏幕1700选择设备位置1710之后,控制应用程序显示了位置控制屏幕1500,如窗口覆盖物设备标题1560所示的“卧室1”。位置控制屏幕1500显示了竖直滑动条控件1530,用于控制卷式百叶窗1730的升起和降下。
73.图18的窗口覆盖物应用程序的位置控制屏幕1800包括具有线1840的水平滑动条控件1830,该水平滑动条控件可以经由触摸屏输入将线设置在期望的水平位置。水平滑动条控件1830被分为由竖线1850表示的十段水平位置,并且用户可以经由触摸屏输入将窗口
覆盖物设备精确地移动到这些预设位置中的一个位置(例如,80%的位置,其中100%是最右边的位置)。位置控制屏幕1800还包括向左按钮1810和向右按钮1820,这两个按钮分别地用于使窗口覆盖物设备朝向左或朝向右移动。在图18的窗口覆盖物应用程序的位置控制屏幕1800的使用示例中,用户在选择屏幕1700选择设备位置1720之后,控制应用程序显示了位置控制屏幕1800,如窗口覆盖物设备标题1860所示的“卧室2”。位置控制屏幕1800包括水平滑动条控件1830,用于控制窗帘或帷帘1740的水平打开和关闭。
74.除了图15的窗口覆盖物应用程序的例如竖直位置屏幕1500和图18的水平位置屏幕1800的位置控制屏幕之外,窗口覆盖物应用程序可以包括一个或多个速度控制屏幕。速度控制屏幕可以包括用于设置电机速度的绝对值以及窗口覆盖物速度的方向(例如,向上或向下、或向左或向右)的控件。此外,速度控制屏幕可以包括用于选择多个预设速度设置中的一个预设速度设置的控件,例如用于选择空闲设置、低速设置、中速设置和高速设置中的一个的单选按钮控件。
75.将给定的用户手势映射到给定的遮光物的控制指令(在此也被称为“位置指令”)可以区分仅适用于局部外部电机100的指令与适用于多个外部电机的指令。在示例中,双击电容式触摸滑动条设计的顶部指令系统为预先设置的窗口百叶窗组中的所有窗口覆盖物(而不仅仅是局部的百叶窗)提供100%的开放。在另一示例中,两指敲击指令系统打开连接到网络中的所有窗口覆盖物。
76.图2是外部执行器100的部件的分解视图。从设备前部左下方的部件开始,前边框130包括电源按钮玻璃板,该电源按钮玻璃板覆盖电源按钮106。前盖玻璃板134包括用于电源按钮的孔。前盖136容置有电源按钮106和作为触摸条104的透明盖板。单轴线条104的可视化显示部件包括led条(也被称为led)140和扩散器138。用于单轴线条104的输入传感器是电容式触摸传感器条142。这些部件用作用于外部电机100的输入
‑
输出设备,该输入
‑
输出设备包括输入接口和可视化显示器,该输入接口沿输入轴线接收用户输入,该可视化显示器与输入轴线对齐。当完全组装完成时,输入
‑
输出设备在壳体102的外部竖直延伸。
77.其他输入/输出部件包括用于通信和/或功率传输的连接器,例如usb端口146以及扬声器(音频输出设备)144。外部电机100的led和音频输出可由外部电机100的状态机使用,以提供可视化和/或音频提示,从而发出要采取的动作信号或确认状态改变的信号。led 140的可视化提示参数例如包括:(a)led指示器(led块)沿滑动条104的不同位置;(b)led灯的不同rgb色值;以及(c)稳定或闪烁的led指示器(包括不同的闪烁率)。
78.在涉及组模式功能的可视化提示的示例中。(不完整的句子)在实施例中,用户可以按压一次组模式按钮116,以使网络中的外部电机设备点亮其led显示屏,告知用户哪些设备将被控制。当用户成功按压组模式116按钮以对外部电机100进行编程以控制外部电机网络中的多个外部电机时,所有被控制的外部电机的led条140的颜色将从稳定的蓝色变为稳定的绿色。
79.在涉及设置功能的可视化提示的示例中,当用户通过按住set按钮启动校准程序时,led条140将变为红色和蓝色,以告知用户外部电机100处于校准模式。当用户成功完成校准程序时,led条140将闪烁绿色,以表示遮光物现在已被校准。
80.在涉及设置位置的可视化提示的示例中,当用户沿电容式触摸条104在特定位置处敲击手指时,led条140在该最后的已知位置处照亮一块led。该指示器告知用户遮光物将
打开或关闭的位置。
81.在音频提示的示例中,音频警报发出信号以表示安全问题。在进一步的示例中,扬声器144向用户广播关于遮光物控制功能的指示。
82.电机驱动部件被容置在壳体102的主体150和后盖170之间。电机部件包括电机152(例如,6v的直流电机)和驱动组件的不同部件。驱动组件的部件包括蜗轮154,该蜗轮由电机旋转驱动并且被耦接到多级齿轮组件160和离合器(图2中未示出)。齿轮组件160包括斜齿轮162(第一级齿轮)、第一直齿轮164(第二级齿轮)和第二直齿轮166(第三级齿轮),第一直齿轮可旋转地安装在套筒轴承156上。印刷电路板148容置有用于外部电机设备100的控制电子设备。
83.直齿轮166经由离合器(未示出)耦接到链轮184(也被称为从动轮),该链轮安装在后盖170的后部。连续绳环(链)120被螺纹连接到链轮184上,使得驱动部件运动,如果连续绳环(链)通过离合器耦接到从动轮184,则推进连续绳环120。
84.驱动组件被配置为接合和推进连续绳环,该连续绳环耦接到用于升起和降下窗口覆盖物的机构。驱动组件包括从动轮184和耦接机构(152、160、离合器),该耦接机构将从动轮184耦接到电机的输出轴。耦接机构被配置为用于使从动轮184沿第一指向和第二指向旋转。从动轮沿第一指向的旋转使得连续绳环沿第一方向推进,以及从动轮沿第二指向的旋转使得连续绳环沿第二方向推进。
85.在外部电机100的后部的结构部件包括后盖178、链轮盖190、后盖玻璃板180和链轮盖玻璃板188。这些部件由后边框192覆盖,该后边框耦接到支架194,该支架用作外部电机100的安装夹具。
86.图9是从一侧看到的电机驱动子组件500的结构部件和组装的工作部件的正视图。前壳体514和后壳体516包封传动系和驱动系统500的其他运行部件,但此处显示为与这些部件分离。在印刷电路板532和电池组528的动力和控制下,直流电机520具有旋转的输出轴。例如,电池528可以是镍金属氢化物(nimh)电池或锂离子聚合物(lipo)电池。如图所示,电池组528可以位于前壳体514和后壳体516内,或者可以位于这些壳体的外部。多级齿轮组件524包括与电机的输出轴成直线的齿轮526和端面齿轮528。端面齿轮528由离合器系统512耦接到从动轮508。离合器512是耦接机构,该离合器包括接合配置和分离配置,在接合配置中,电机520的输出轴的旋转(由多级齿轮组件传递)引起从动轮508的旋转;在分离配置中,从动轮508不通过电机的输出轴旋转。在实施例中,离合器512是以机械地方式传递扭矩的电动设备,例如电磁离合器或螺线管。在另一实施例中,离合器512是不以电力运行的双向机械式离合器。
87.连续按压电源按钮504在离合器系统的接合和分离配置之间切换驱动组件512。电源按钮504对应于图1和图2的外部致动器实施例100中的电源按钮106。在实施例中,电源按钮106通过使从动轮或链轮508分别与离合器系统512接合和分离来打开或关闭设备。在另一实施例中,按压电源按钮106触发外部致动器100的通电和断电。
88.在利用双向机械式离合器的一个实施例中,当电源按钮106被按压在“开启”位置时,机械式离合器将从动轮与电机的输出轴和齿轮组件接合。这是张紧的位置,在该张紧的位置中,机械式离合器将不能通过手动拉动或拖拽前链/绳122或后链/绳124来运行从动轮。在该接合配置中,当外部电机100从设备上控件或其他设备接收遮光物控制指令时,外
部电机将激励电机以使输出轴和齿轮转动,从而使从动轮转动。当电源按钮106被按压在“关闭”位置时,机械式离合器将从动轮与输出轴和齿轮分离,使得能够手动运行前链/绳122或后链/绳124。在分离配置中,如果在离合器未接合时发出遮光物控制指令,从动轮将不会转动。
89.在另一实施例中,离合器系统是电磁离合器,在该离合器系统中,从动轮总是与输出轴和齿轮组件接合。电磁离合器使得能够手动运行前链/绳222或后链/绳224。该离合器不会将从动轮锁定到输出轴和齿轮,但在通电时会将从动轮与输出轴和齿轮接合。
90.在另一实施例中,当外部电机100经由电源按钮106“开启”或与从动轮接合时,系统将识别用户拖拽前链/绳或后链/绳。在一个实施例中,当外部电机被张紧时用户拖拽前链/绳122,与触摸条104相关联的led将闪烁以告知用户可以用电容式触摸条来控制设备。
91.在另一实施例中,当外部电机经由电源按钮106“开启”或与从动轮接合时,以及当外部电机被张紧时用户拖拽链/绳,外部致动器100将使用传感器和/或编码器来识别用户的动作,并基于与特定拖拽动作相关联的指令来自动地降下或升起百叶窗或采取其他动作。所提到的动作可以包括拖拽前链/绳122或后链/绳124。
92.在实施例中,外部电机100的传感器和/或编码器经由用户对绳子的“拖拽”或拉动动作来测量绳子的手动运动。链轮184到齿轮组件160的机械耦接包括一定量的松弛,使得用户在连续绳环120上的拖拽将引起链轮的一定量的运动并且该运动将被传感器或编码器(例如,图7的编码器322)识别。基于传感器或编码器输出,遮光物控制指令结构可以包括不同的遮光物控制动作,并且接合电机以执行给定动作。在外部电机100被接合并且打开或关闭百叶窗时拖拽绳子可以发送不同的指令,例如阻止百叶窗打开/关闭。
93.结合电机以执行遮光物控制指令的拖拽动作的示例如下:
94.(a)感应到向下的拖拽,以相同的方向接合直流电机。例如,如果用户向下拖拽前链/绳122,则电机将运行并且降下窗口遮光物;
95.(b)感应到向下的拖拽,分离直流电机。例如,当电机升起或降下窗口遮光物时,如果用户向下拖拽后链/绳124,则电机将分离并且在该位置停止遮光物。
96.(c)感应到向下的拖拽,以相反的方向接合直流电机。例如,如果用户向下拖拽后链/绳124,则电机将运行并且升起窗口遮光物。
97.再次参照图1,rf按钮112用于经由射频芯片(rf)将外部电机配对或同步到移动电话,该射频芯片包括但不限于ble(bluetooth low energy,低功耗蓝牙)、wifi或其他rf芯片。通过利用包括不同协议的rf芯片形成网状网络,rf按钮112可用于配对或同步到第三方设备,例如智能恒温器、hvac系统或其他智能家庭设备。协议包括但不限于ble(低功耗蓝牙)网状网络、zigbee(例如,zigbee ha 1.2)、z
‑
wave、wifi和thread。
98.图13是响应在902处接收到的分组调用而由外部电机执行的分组网状例程的流程图。例如,可以在图12的组模式例程中的806处触发分组调用。当接收到分组调用时,外部电机启动ble网状模式,从而使用低能耗蓝牙协议将消息传送到组(ble网状网络)中的其他外部电机。对于使用其他协议330(例如zigbee、z
‑
wave、wifi或thread)进行rf通信的外部电机网络(图7),分组调用例程将在804处被修改以基于适用的协议发起与组中的其他外部电机的通信。类似地,分组调用例程可以被修改以适应外部电机网络的不同网状拓扑,例如hub
‑
and
‑
spoke(星形拓扑)。
99.set按钮114用于校准或预先设置百叶窗的最大打开和关闭位置。用户固定/安装外部电机100后,用户可以校准设备以手动设置百叶窗完全打开或完全关闭的位置。然后,用户按压电容式触摸滑动条104的顶部以一直向上升起百叶窗。当百叶窗到达顶部位置时,用户再次按压set按钮114以保存该顶部位置。然后,用户按压电容式触摸滑动条控件104的底部位置以降下百叶窗。当百叶窗到达底部位置时,用户再次按压set按钮以保存该底部位置。由用户设置的顶部位置和底部位置可以反映用户的偏好,并且可以从一个外部电机到另一个外部电机发生变化。
100.图10是由外部电机100执行的校准例程的流程图。校准例程从校准指令602开始,校准指令可以通过按住外部电机的set按钮114或以一些其他方式(例如,在移动设备处的输入)来实现。在604处,系统将控制传递给遮光物控制状态机和校准状态机。下面参照图11来讨论遮光物控制状态机。校准状态机控制用于led指示器的指令结构;基于编码器脉冲数据计算由用户选择的顶部位置和底部位置;当用户确认时,保存这些顶部位置和底部位置;并计算顶部位置到底部位置之间的距离,以将遮光物控制指令缩放到校准位置。在这些例程中,用户可以执行不同的电机控制指令以将百叶窗移动到期望的顶部位置。在606处,系统通过按压set按钮来检测用户是否选择并确认了顶部位置。如果是,则例程在608处保存(校准)顶部位置。在610处,系统再次将控制传递给遮光物控制状态机和校准状态机。在621处,系统通过按压set按钮来检测用户是否选择并确认了底部位置,并且,如果是,则在614处保存(校准)底部位置。用户在614处最终确认校准后,系统退出校准例程。
101.在所示的实施例中,校准程序先设置了顶部位置,随后设置了底部位置。在替代地实施例中,不是先设置顶部位置,随后设置底部位置,而是校准程序先设置了底部位置,随后设置了顶部位置。
102.在另一校准实施例中,用户在有限的时间内按住set按钮114以反转运动方向。在该实施例中,如果用户旨在升起百叶窗而按压电容式触摸滑动条控件104的顶部,但外部电机100反而是降下了百叶窗,则用户可以在指定的时间范围内按住set 114以反转该方向。然后,用户按压电容式触摸滑动条控件104的顶部以将百叶窗完全升起,然后,按压set按钮114来设置顶部位置。然后,用户按压电容式触摸滑动条控件104的底部降下百叶窗,然后按压set按钮114来设置底部位置。
103.在另一校准实施例中,用户可以按压set进行自动校准。在自动校准期间,外部电机经由预定的传感器测量来确定顶部位置和底部位置。
104.图11是由外部电机100执行的遮光物控制例程的流程图。在702处,系统接收将控制传递给遮光物控制状态机的指令。在704处,系统将控制传递给电机控制例程。电机控制例程启动并停止电机;使电机沿选定的方向(向上/向下)移动;使电机移动到选定位置;并且调节电机的速度。电机控制例程通常由用户指令触发,但也可以自动触发,例如,在感测到影响安全的情况时自动触发。在706处,系统检测用于外部电机的组模式是否被激活。如果是,则外部电机的控制系统将遮光物控制信息广播708给组中的其他电机以供执行。在组中的不同的外部电机之间,响应信息708执行的遮光物控制指令可以变化。例如,基于校准位置的遮光物控制指令将根据针对每个外部电机校准的顶部位置和底部位置而变化。如果组模式没有被激活,则外部电机在706处退出遮光物控制例程;否则将在广播遮光物控制信息后,在708处退出例程。
105.在不同的实施例中,由外部电机100执行的遮光物控制例程被配置为限制电机从空闲(静止)状态到全速运行的加速度,并且限制电机从全速运行返回到空闲状态的减速度。在不同的实施例中,遮光物控制例程使外部电机100的速度从空闲状态斜坡上升到全速,并且使外部电机100的速度从全速斜坡下降到空闲状态。将电机的速度从空闲状态斜坡上升并且将电机的速度斜坡下降返回到空闲状态的这些功能,在本公开中也被称为斜坡轨迹速度控制。例如,斜坡轨迹速度控制可以提供电机速度的线性斜坡上升或线性斜坡下降。申请人观察到,斜坡轨迹速度控制减少或避免了由于过度加速而在窗口覆盖物驱动系统中的连续绳环上可能出现的应力,并且这些应力可以拉伸、削弱或以其他方式损坏连续绳环(例如绳索、绳子或珠状链条)。
106.在实施例中,电机的斜坡轨迹程序包括控制指令,该控制指令可以经由无线通信(例如,蓝牙控制)、触摸屏控制或自动调度输入以及其他的可能性而被控制系统接收。例如,在以下伪代码中描述了指令结构:
107.cmd_code.data.shade_pos
108.该指令具有从0x00到0x64的值,对应于0%
‑
100%的电机位置控制。
109.cmd_code.data.motor_pwm
110.该指令通过分别分配1值或0值来选择电机斜坡轨迹的慢模式或快模式。
111.cmd_code.cmd
112.该指令的ctrl_proto_pos值表示指令应该发送到顶部控制状态机(本文中也被称为顶部状态机)。
113.topsm_task
114.除了顶部控制状态机以外,还有不同的辅助状态机。topsm_task运行gear_topsm_dostep任务以管理分配给辅助状态机的控制和指令,以用于校准、触摸led、电机控制和其他功能。
115.调度器按周期性调度表来运行顶部状态机和其他任务。在示例性实施例中,基本的定时器间隔为8ms,因此所有任务以8ms的倍数运行。顶部状态机每24ms运行一次。电机轨迹控制任务(motortrajectorysm_task)每104ms运行一次。如以下伪代码中所述,gear_topsm_dostep状态机被称为shade_sm_dostep。如果状态机返回“complete”值,则此状态转换为空闲。
[0116][0117]
在以下伪代码中,shade_sm_dostep指令采用位置指令并使用height_calcpos(shade_pos)函数计算heightselect值。heightselect是对应于从指令结构接收到的高度百分比的编码器值。motor_dopos函数在启动电机旋转时确定运动方向,并且基于该确定选择motor_pwm(脉冲宽度调制值):
[0118][0119]
motor_dopos函数创建了以下指令结构,该指令结构仅用于motor_trajectory_sm_dostep状态机的电机轨迹控制。该状态机由motortrajectorysm_task运行。
[0120]
mtr_cmd.mtr_dir=采用motor up(电机向上)值或motor down(电机向下)值
[0121]
mtr_cmd.mtr_mod=pwm(pulse width modulation,脉冲宽度调制)模式
[0122]
mtr_cmd.mtr_cmd=新指令取值为1
[0123]
motor_trajectory_sm_dostep状态机在其下一个执行周期中捕获上述指令结构,以开始斜坡控制的运行。该状态机从电机静止(空闲)状态管理电机的斜坡控制,以及管理中断正在运行的电机的任何指令。状态机包括以下斜坡轨迹函数和其他函数:(a)从闲置状态斜坡上升的函数;(b)当电机处于运行状态时,使电机减速并且停止的函数;(c)当电机处于运行状态时,使电机向相反方向倾斜,以响应要求运动的指令的函数;以及(d)当电机处于运行状态时,使电机继续运行到新位置,以响应要求沿与当前运动相同的方向的运动的函数。在以下伪代码中描述了斜坡轨迹函数:
[0124][0125]
图20是电机斜坡轨迹状态机的状态流程图,该状态流程图建立在以下有限状态机流程上:
[0126]
s1:motor_profile_idle
‑
2010
[0127]
s2:motor_profile_direction
‑
2020
[0128]
s3:motor_profile_wait
‑
2030
[0129]
s4:motor_profile_stop
‑
2040
[0130]
s5:motor_profile_ramp_up
‑
2050
[0131]
s6:motor_profile_run
‑
2060
[0132]
s7:motor_profile_ramp_down
‑
2070
[0133]
这些有限状态机的状态转换如图20所示。新指令由mtr_cmd表示,该指令创建了从任何状态到motor_profile_direction状态s2 2020的转换。motor_profile_direction状态s2 2020基于当前位置和电机运行状态决定电机是停止还是斜坡上升。一旦状态完成了其功能,处理流程就会进行完整的转换从而流回到motor_profile_idle状态s1 2010,以等待新的指令。
[0134]
在示例性实施方式中,电机斜坡轨迹状态机以20的步长将电机pwm从0增加到200。随着电机斜坡轨迹状态机每104ms运行一次,增加pwm需要大约1秒来斜坡上升。在实施例中,电机在一个步长中将pwm从200斜坡下降到0。由于电机因惯性而自然的斜坡下降,据观察,该斜坡时间足以避免对连续绳环珠状链条施加过度的应力。在实施例中,电机斜坡轨迹由控制系统自动确定。在实施例中,用户可以在系统设置期间修改默认的电机斜坡轨迹。
[0135]
group按钮(图1;本文中也被称为组模式按钮)116将网络内的多个外部电机100添加到组中以便同时控制这些外部电机。在一个实施例中,组模式使得用户能够从一个外部电机100控制组内的所有外部电机。在实施例中,为了将额外的外部电机添加到组中,用户按住group按钮116以进入配对模式。触摸条104的led灯将闪烁橙色以表示设备处于配对模式。在一个实施例中,用户在指定的时间范围内按住她想要添加到组中的、网络的所有外部
circuit,rfic)330与不同的rf模块进行无线网络通信。rfic 330通过控制系统300控制双向无线网络通信。无线网络和通信设备可以包括局域网(local area network,lan),局域网可以包括用户远程控制设备、广域网(wide area network,wan)、无线网状网络(wireless mesh network,wmn)、“智能家庭”系统以及例如集线器和智能恒温器的设备,以及许多其他类型的通信设备或系统。控制系统300可以采用标准的无线通信协议,例如蓝牙、wifi、z
‑
wave、zigbee和thread。
[0143]
输出接口340控制从微处理器310到输出设备(例如,led 342和扬声器344)的系统输出。输出接口340控制可视化提示和音频提示的显示,以识别外部电机控制系统的状态并且传递信息。输入接口350控制来自输入设备(例如,电容式触摸设备352和按钮354)的系统输入。输入接口350识别可以由微处理器310映射到指令生成器中的遮光物控制功能的给定用户输入。例如,输入接口350可以识别触摸条或其他电容式触摸设备352处的给定用户手指手势。
[0144]
在实施例中,编码器322是光学编码器,该光学编码器为电机302的每次旋转输出给定数量的脉冲。有利地,微控制器310对这些脉冲进行计数并且分析脉冲计数以确定窗口覆盖物装置的运行特性和位置特性。也可以使用其他类型的编码器,例如磁性编码器、机械编码器等。通过距离/脉冲转换因数或脉冲/距离转换因数,由编码器输出的脉冲的数量可以与百叶窗织物204的线性位移相关联。例如,参照图5,当窗口百叶窗204处于完全关闭的位置(0%开放),可以按住外部电机210的按钮以使窗口百叶窗上升到窗框的顶部,并且一旦到达顶部处就可以松开按钮。外部电机210能够以织物204的总长度(高度)来测量该行程,从而确定窗口百叶窗完全打开的位置、完全关闭的位置以及处于完全打开位置与完全关闭位置之间的开放水平。
[0145]
在实施例中,控制系统300监测不同的系统运行模式,并且根据系统300的运行状态来接合或分离离合器306。在一个实施例中,当直流电机302是在用户(操作者)的控制下或在由微控制器310的自动控制下使直流电机的输出轴旋转时,离合器306被接合,从而推进连续绳环320。当微控制器310没有处理操作者的指令或自动功能来推进连续绳环时,离合器306被分离,用户可以手动推进连续绳环以运行窗口覆盖物系统。在断电的情况下,离合器306将被分离,使得能够手动运行窗口覆盖物系统。
[0146]
图8是外部电机控制系统400的输入/输出(黑匣子)图。外部电机控制系统400的监测变量(输入)410包括:用于百叶窗控制的用户输入指令(例如,包含指令的字符串包)412、从百叶窗的顶部到当前位置的距离(例如,以米为单位)414、百叶窗的滚动速度(例如,以米每秒为单位)416、电池的当前充电水平(例如,以mv为单位)418、温度传感器的输出(例如,以mv为单位)420、光传感器的输出(例如,以mv为单位)422、运动传感器的输出(例如,以mv为单位)424、智能家庭集线器指令(例如,包含指令的字符串包)426、智能家庭数据(例如,以摄氏度为单位的恒温器的温度值)428、以及电机302的电流消耗(例如,以a为单位)430。
[0147]
外部电机控制系统400的受控变量(输出)440包括:在给定时间内的百叶窗的预期滚动速度(例如,以米每秒为单位)442、在给定时间内的从当前位置的预期位移(例如,以米为单位)444、来自设备的用户反馈指令(例如,包含指令的字符串包)446、在给定时间内的离合器的接合/分离指令448、以及输出到智能家庭集线器的输出数据(例如,以摄氏度为单位的温度值,该温度值对应于温度传感器的输出420)450。
[0148]
在实施例中,外部电机控制系统400向第三方家庭自动化控制系统或设备发送数据(如传感器输出432、434和436)。第三方系统或设备可以根据该数据来控制其他家庭自动化功能。第三方家庭自动化设备例如包括,例如霍尼韦尔智能恒温器(霍尼韦尔国际公司,莫里斯敦,新泽西州)的“智能恒温器”、nest learning恒温器(nest labs,帕洛阿尔托,加利福尼亚)、venstar可编程恒温器(venstar公司,查特斯沃思庄园,加利福尼亚)以及lux可编程恒温器(lux产品,费城,宾夕法尼亚州)。其他家庭自动化设备包括hvac(heating,ventilating,and air conditioning,加热、通风和空气调节)系统和智能通风系统。
[0149]
在另一实施例中,外部电机控制系统400接受来自第三方系统和设备的指令和数据,并且根据这些指令和数据来控制窗口覆盖物系统。
[0150]
在实施例中,外部电机控制系统400经由用户编程的调度表来调度窗口覆盖物系统的运行。
[0151]
在实施例中,运动传感器424的传感器输出被纳入节电过程。传感器424可以是呈无源红外(passive infrared,pir)传感器形式的存在/运动传感器,或者可以是例如与外部电机的电容式触摸输入接口相关联的电容式触摸传感器。在该过程中,外部电机系统400处于休眠/睡眠状态,直到存在/运动传感器检测到用户的运动或存在。在实施例中,当感测到用户的存在/运动时,外部电机设备的led指示器点亮以表示该设备可以使用。在实施例中,在一段时间不活动之后,设备进入低功率状态以保存能量。
[0152]
在另一实施例中,外部电机控制系统400控制多个窗口覆盖物系统,并且该外部电机控制系统可以相对于组模式控件,将如上文所述要一起控制的窗口覆盖物系统分组。组的示例包括与面向特定方向的窗口相关联的外部电机,以及与位于建筑物给定层的窗口相关联的外部电机。
[0153]
在另一实施例中,外部电机控制系统400基于监测到的传感器的输出来控制窗口覆盖物系统。例如,基于光传感器的输出422,窗口覆盖物系统可以基于特定的照明条件(例如,在日出时打开百叶窗)来自动地打开或关闭。在另一示例中,基于运动传感器的输出424,系统可以在检测到用户进入房间时自动地打开百叶窗。在另一示例中,基于温度传感器的输出420,系统可以在白天期间自动打开百叶窗来为寒冷的房间取暖。此外,系统可以存储温度传感器的数据以发送到其他设备。
[0154]
在实施例中,窗口覆盖物应用程序可以控制窗口覆盖物的前进和后退的方向和速度。图22的速度控制屏幕2200用于设置窗口覆盖物的移动方向(打开/关闭)和速度,在所示的实施例中,用户已经在图17的窗口覆盖物设备的选择屏幕上选择了卷式百叶窗,并且速度控制屏幕2200控制卷式百叶窗的竖直方向和滚动速度(例如,以米每秒为单位)。打开/关闭控件2210显示向下箭头图标2214和向上箭头图标2218,该向下箭头图标和向上箭头图标分别使窗口百叶窗控制器降下(打开)和升起(关闭)卷式百叶窗。速度控制屏幕包括两种不同的模式2220、2230来供用户选择百叶窗的滚动速度,通常一次只使用这些模式中的一种模式。设置速度水平模式2200包括控件2224,该控件选择介于0%(卷式百叶窗静止或处于空闲状态)到100%(最大速度)之间的百分比值,包括0%和100%。在不同的实施例中,百分比控件2224可以在连续的范围内选择百分比值,或者也可以从离散值的范围内选择百分比值,例如,如图所示,百分比控件选择具有一位小数位的百分比值,即,最大速度的58.5%。预设速度模式2230包括多个单选按钮,可以选择多个单选按钮中的一个单选按钮来选择有
限数量的预定卷式百叶窗滚动速度中的一个预定卷式百叶窗滚动速度。在此,预定速度包括低速2232、中速2234和高速2236。在实施例中,模式2220中的最大速度和模式2230中的预设速度是默认速度。在实施例中,模式2220中的最大速度和模式2230中的预设速度在设备设置期间由用户进行设置。
[0155]
图19是与外部电机窗口覆盖物驱动系统、外部数据源和传感器协调以管理太阳能加热效应的子系统(也被称为系统)1900的图。子系统1900基于天气条件(例如,公共天气数据)、一天中的时间、窗户覆盖物的位置以及可能影响太阳热量增益的其他条件来自动控制窗口覆盖物的位置。
[0156]
窗口为居住者提供了日光、阳光直射、与外界的可视化接触和开放的感觉。由于太阳能是由光和热组成的,该能量不容易控制,因此必须同时考虑照明和热效应。虽然希望在给定的恒定水平上引入阳光用于天然照明,但是必须根据不同的条件确定是否允许阳光进入建筑物内部。在本公开中,用于确定是否允许阳光进入建筑物内部的条件被称为阳光进入条件,也被称为阳光进入条件数据。在不同的实施例中,阳光进入条件可以由系统1900的不同元件检测、计算或存储以用于管理太阳能加热效应。
[0157]
确定是否允许阳光通过的主要因素是外部的天气条件。季节性也可能涉及显著的阳光进入条件。来自太阳的辐射热减少了冬季的供暖负荷,但是增加了夏季期间的制冷负荷。在太阳能增益峰值期间,可能需要覆盖窗口(例如,降下窗口百叶窗),以减少制冷负荷和过热。在多云的条件下,或在冬季,可能需要打开窗口(例如,升起窗口百叶窗),让日光和有用的太阳能增益进入建筑物,从而建筑物可以减少对电照明和供暖的依赖。
[0158]
包括太阳朝向的窗口位置可以代表显著的阳光进入条件。一般来说,朝北的房间在一天中的大部分时间里都有良好的日光;在一年中的大部分时间里都有太阳能增益;可能需要窗口覆盖物,以防止夏季过热、并且在冬季有良好的被动太阳能增益。通常,朝东的房间有良好的晨光;一年的早晨都有太阳能增益,以提供初始变暖;下午晚些时候将会比较凉爽。通常,朝西的房间晨光有限;下午有良好的日光;在一年中的大部分时间里,可能需要窗口覆盖物以防止下午晚些时候的过度加热和眩光;并且提供良好的太阳能直接增益,以在晚上为居住空间的热质量加热。通常,朝南的房间在一年中的部分时间里日光水平较低,很少或没有热量增益。
[0159]
包括太阳朝向的窗口的位置(结合一天中的时间)通常代表了阳光进入条件的重要组合。例如,在早晨太阳升起时,可能需要覆盖位于建筑物东面的窗口,以阻止太阳热量增益,并减少建筑物中人工冷却的需要。在白天,为了捕捉自然光并且减少对人工照明的需要,可能希望在建筑物的西面打开窗口。
[0160]
阳光进入条件还可以包括内部照明度和室温,这是例如通过用于打开和关闭窗口覆盖物的设备附近的光传感器和温度传感器来测量的。另一个考虑是建筑物或建筑物的房间是否被占用,这是例如通过占用传感器来测量的。
[0161]
如在本公开中所使用的,一个或多个窗口打开标准是由驱动系统控制器接收的一组阳光进入条件,该一组阳光进入条件使驱动系统收回或打开窗口覆盖物。在不同的实施例中,窗口打开标准可以使驱动系统完全收回或打开窗口覆盖物,或部分收回或打开窗口覆盖物(例如,达到给定降低的开放水平)。如在本公开中所使用的,一个或多个窗口覆盖标准是由驱动系统控制器接收的一组阳光进入条件,该一组阳光进入条件使驱动系统展开或
关闭窗口覆盖物。在不同的实施例中,窗口覆盖标准可以使驱动系统完全展开或覆盖窗口覆盖物,或部分展开或关闭窗口覆盖物(例如,达到给定升高的开放水平)。
[0162]
在实施例中,窗口打开标准和窗口覆盖标准是由驱动系统控制器基于所接收的一组阳光进入条件来计算的分数。在另一实施例中,窗口打开标准和窗口覆盖标准是基于阳光进入条件的最大阈值和最小阈值。用于确定窗口打开标准和窗口覆盖标准的过程可以包括阳光进入条件的加权,以及相关阳光进入条件的组合,例如窗口位置(太阳朝向)与一天中的时间的组合。
[0163]
在图19的方框图中,控制/应用程序模块1910可以代表不同类型的控制设备。控制/应用程序模块1910可以被设计为用于商业建筑物的窗口覆盖物控制系统。在其他实施例中,简化的控制系统可以被设计为用于家庭的窗口覆盖物控制系统。在不同的实施例中,控制设备1910可以在移动设备应用程序或桌面应用程序中实施。在优选的网络布置中,系统通过ip(因特网协议)控制到“云”。控制系统1910提供用户和管理水平的控制、监测、设置和覆盖系统操作。
[0164]
在不同的实施例中,云1940是处理整个系统智能、控制算法和决策引擎的后端系统。该系统处理来自不同传感器的输入,并且包括特定于部署的和使用的偏好。天气系统api决定哪些窗口遮光物应该完全打开、完全关闭或处于给定的中间开放水平。在不同的实施例中,云1940包括机器学习算法。在实施例中,云1940是在网络服务中实施的(aws是用于应用程序服务提供商服务的亚马逊科技公司,西雅图,wa的注册商标)。
[0165]
axis云1960是后端系统,该后端系统收集用于改进算法模型的匿名使用数据和统计信息。在不同的实施例中,该数据用于系统1900的持续训练和改进。
[0166]
天气/太阳能api 1920从例如openweatherap.org和geotoolkit.org等资源中提取天气数据和太阳能数据。openweatherap.org是一项在线服务,该在线服务为网络服务和移动应用程序的开发人员提供天气数据,该天气数据包括当前的天气数据、预测数据和历史数据。openweathermap服务基于vane地理空间数据科学平台(vane geospatial data science platform)。geotoolkit.org是用于开发地理空间应用程序的免费的java语言库。
[0167]
传感器/bms模块1930包括外部电机窗口覆盖物控制系统的传感器,例如光传感器、温度传感器和占用感测器。在一些实施例中,传感器/bms模块与例如bacnet的建筑物管理系统集成,其可以通过以太网与桥1950连接(interface)。bacnet是用于建筑物自动化和控制(building automation and control,bac)网络的通信协议,该建筑物自动化可控制网络利用了ashrae、ansi和iso 16484
‑
5标准协议。在不同的实施例中,传感器/bms 1930经由例如zigbee、蓝牙和wifi的通信协议与其他系统元件进行通信。传感器/bms模块的输出用于控制太阳能热增益的决策算法,以及相关的控制功能(例如环境温度的集成控制)。
[0168]
桥1950是中央管道,该中央管道用于无线连接到外部电机的窗口覆盖物驱动系统、以及无线连接到与云1940和控制/应用程序模块1910连接的ip、bacnet和传感器。在示例性商业实施方式中,桥设备1950根据覆盖范围被放置在办公建筑物的每一层。在一些实施例中,桥1950在检测到与云1940的连接丢失时,运行一些控制和故障模式算法。
[0169]
外部电机驱动系统1970安装在窗口覆盖物系统上,并且在特定的窗口位置处提供遮光物位置数据和太阳能数据。在一些实施例中,外部电机驱动系统1700由控制系统1900
直接控制。
[0170]
尽管已经公开了不同的方面和实施例,但是还可以设想其他的方面和实施例。所公开的不同方面和实施例是为了说明的目的而不是限制性的,真正的范围和精神由以下的权利要求表明。
[0171]
前述方法描述和接口配置仅作为说明性示例提供,并不旨在要求或暗示必须以所呈现的顺序来执行不同实施例的步骤。本领域技术人员将理解,可以以任何顺序来执行前述实施例中的步骤。例如“然后”、“其次”等词并不旨在限制步骤的顺序;这些词只是用来引导读者浏览对方法的描述。尽管过程流程图可以将运行描述为顺序过程,但许多运行可以并行或同时执行。此外,可以重新安排运行的顺序。过程可以对应于方法、函数、程序、子例程、子程序等。当过程对应于函数时,过程的终止可以对应于函数返回到调用函数或主函数。
[0172]
结合在此公开的实施例描述的不同的说明性逻辑块、模块、电路和算法步骤可以实施为电子硬件、计算机软件或两者的组合。为了清楚地说明硬件和软件的这种互换性,上文已经根据它们的功能大体上描述了不同的说明性部件、块、模块、电路和步骤。这种功能是作为硬件还是软件来实施取决于对整个系统施加的特定的应用程序和设计约束。本领域的技术人员可以针对每个特定的应用程序以不同的方式实施所描述的功能,但是该实施决策不应该被解释为导致偏离本发明的范围。
[0173]
在计算机软件中实施的实施例可以在软件、固件、中间件、微代码、硬件描述语言或其任何组合中实施。代码段或机器可执行指令可以表示程序、函数、子程序、编程、例程、子例程、模块、软件包、类或指令、数据结构或编程语句的任何组合。代码段可以通过传递和/或接收信息、数据、自变量、参数或存储器内容而被耦接到另一代码段或硬件电路。信息、自变量、参数、数据等可以经由任何适当的方式传递、转发或传输,该任何适当的方式包括存储器共享、消息传递、令牌传递、网络传输等。
[0174]
用于实施这些系统和方法的实际软件代码或专用控制硬件不限制本发明。因此,在没有参照特定软件代码的情况下描述了系统和方法的运行和行为,应该理解,软件和控制硬件可以被设计为基于此处的描述来实施系统和方法。
[0175]
当以软件实施时,功能可以作为一个或多个指令或代码被存储在非瞬时计算机可读或处理器的可读存储介质上。在此公开的方法或算法的步骤可以体现在处理器可执行软件模块中,该处理器可执行软件模块可以驻留在计算机可读或处理器可读的存储介质上。非瞬时计算机可读或处理器可读的介质包括计算机存储介质和有形存储介质,这些可读介质便于将计算机编程从一个地方转移到另一个地方。非瞬时处理器可读存储介质可以是可以通过计算机访问的任何可用介质。作为非限制性的示例,该非瞬时处理器可读介质可以包括ram、rom、eeprom、cd
‑
rom或其他光盘存储器、磁盘存储器或其他磁存储设备、或者任何其他有形存储介质,这些有形存储介质可以用于以指令或数据结构的形式存储所需的编程代码,并且可以由计算机或处理器访问。如此处所使用的磁盘和盘包括压缩盘(compact disc,cd)、激光盘、光盘、数字多功能盘(digital versatile disc,dvd)、软盘和蓝光盘,其中,磁盘通常以磁性方式复制数据,而盘则使用激光以光学方式复制数据。上述的组合也应包括在计算机可读介质的范围内。此外,方法或算法的运行可以作为一个代码和/或指令或代码和/或指令的任意组合或组驻留在非瞬时处理器可读介质和/或计算机可读介质上,并
且可以被并入到计算机程序产品中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。