1.本发明的实施方式涉及控制装置及床装置。
背景技术:
2.例如,有一种床架的高度等可变的床。期望适当地控制床。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2008
‑
259630号公报
技术实现要素:
6.发明所要解决的技术问题
7.实施方式提供一种能够适当地控制床的控制装置及床装置。
8.解决问题所采用的技术方案
9.根据实施方式,控制装置包括控制部。所述控制部基于床装置的第一致动器的轴的伸缩的第一变化量,控制所述第一致动器的所述轴的所述伸缩的速度。
10.发明效果
11.根据实施方式,可以提供一种能够适当地控制床的控制装置及床装置。
附图说明
12.图1的(a)及图1的(b)是例示第一实施方式的控制装置及床装置的示意图。
13.图2是例示第一实施方式的控制装置及床装置的示意图。
14.图3是例示第一实施方式的控制装置及床装置的示意图。
15.图4的(a)及图4的(b)是例示第一实施方式的床装置的特性的曲线图。
16.图5的(a)及图5的(b)是例示第一实施方式的控制装置及床装置的动作的曲线图。
17.图6是例示第一实施方式的控制装置及床装置的动作的曲线图。
18.图7的(a)~图7的(c)是例示第一实施方式的控制装置及床装置的动作的示意图。
19.图8是例示实施方式的床装置的示意性立体图。
20.图9的(a)~图9的(c)是例示实施方式的床装置的一部分的示意图。
21.图10的(a)及图10的(b)是例示实施方式的床装置的一部分的示意图。
22.图11的(a)~图11的(c)是例示实施方式的床装置的一部分的示意图。
23.图12的(a)及图12的(b)是例示实施方式的床装置的一部分的示意图。
24.图13是例示实施方式的床装置的一部分的示意图。
25.图14是例示实施方式的床装置的一部分的示意图。
26.图15的(a)及图15的(b)是例示实施方式的床装置的一部分的示意图。
27.图16的(a)~图16的(c)是例示实施方式的床装置的动作的示意性立体图。
28.图17的(a)及图17的(b)是例示实施方式的床装置的使用状态的示意性立体图。
29.图18是例示实施方式的床装置的示意图。
30.图19的(a)及图19的(b)是例示实施方式的床装置的一部分的示意图。
31.图20的(a)及图20的(b)是例示实施方式的床装置的一部分的示意图。
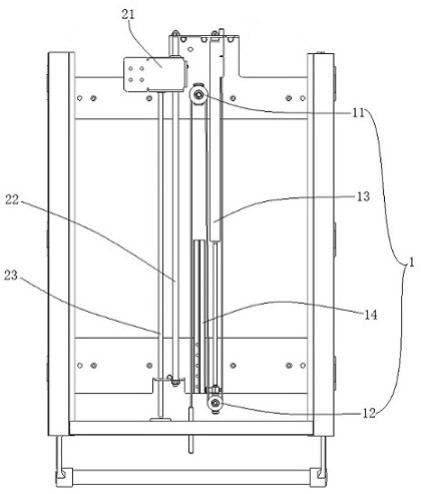
32.图21是例示实施方式的床装置的一部分的示意图。
33.图22是例示实施方式的床装置的一部分的示意性立体图。
34.图23是例示实施方式的床装置的一部分的示意图。
35.图24的(a)及图24的(b)是例示实施方式的床装置的一部分的示意图。
具体实施方式
36.下面,参照附图对本发明的各实施方式进行说明。
37.在本技术说明书和各图中,对与参考先前的图描述的相同的要素标注相同的附图标记,并适当地省略详细的说明。
38.(第一实施方式)
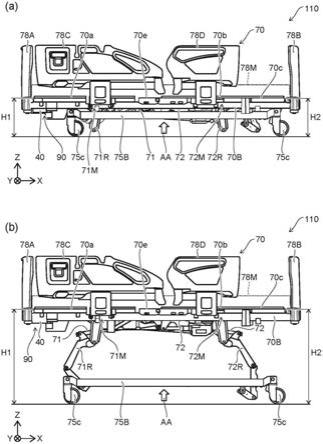
39.图1的(a)、图1的(b)及图2是例示第一实施方式的控制装置及床装置的示意图。
40.图1的(a)及图1的(b)是例示床装置的多个状态的侧视图。图2是从图1的(a)及图1的(b)的箭头aa观察的仰视图。
41.如图1的(a)及图1的(b)所示,实施方式的控制装置90与床70一起使用。例如,床装置110包括床70及控制装置90。
42.例如,控制装置90与床70通过有线或无线等任意方法连接。控制装置90例如也可以是智能手机等便携式终端。
43.控制装置90包括控制部40。在该例中,控制部40固定到床70。
44.床装置110例如包括基架75b及床架70b。例如,在基架75b的上方有床架70b。在该例中,在基架75b设置有脚轮75c。
45.例如,在床架70b设置有背部底板70a、膝关节底板70b、脚部底板70c及腰部底板70e。在背部底板70a、膝关节底板70b、脚部底板70c及腰部底板70e上设置有床垫78m。床70的用户可以躺在床垫78m上。在床70上,也可以设置床头板78a及床尾板78b等。另外,也可以设置侧边护栏(side rail)78c及78d等。如下所述,背部底板70a、膝关节底板70b及脚部底板70c等的角度也可以是可变的。
46.在床70上,将从头侧朝向脚侧的方向设为x轴方向。将左右方向设为y轴方向。将高度方向设为z轴方向。
47.如图1的(a)及图1的(b)所示,床70的高度是可变的。床70的高度例如是地板面(脚轮75c的下端)的z轴方向上的位置和床架70b的上表面的z轴方向上的位置之间的z轴方向上的距离。
48.在该例中,床架70b的头侧部分的高度和床架70b的脚侧部分的高度可以互相独立地改变。例如,床架70b可以倾斜。床架70b整体的高度可以改变。
49.例如,将床架70b的头侧的一个部分设为第一可动部71m。将床架70b的脚侧的一个部分设为第二可动部72m。
50.在一个例子中,第一可动部71m是头侧的可动部,第二可动部72m是脚侧的可动部。也可以是,第一可动部71m是脚侧的可动部,第二可动部72m是头侧的可动部。下面,对第一
可动部71m是头侧的可动部,第二可动部72m是脚侧的可动部时的例子进行说明。
51.如图2所示,设置有第一致动器71及第二致动器72。第一致动器71能够使第一可动部71m移动。第二致动器72能够使第二可动部72m移动。
52.如图1的(a)及图1的(b)所示,在该例中,设置有第一连接部71r及第二连接部72r。第一连接部71r与第一可动部71m及第一致动器71连接。第一连接部71r使第一可动部71m产生与第一致动器71的移动相对应的移动。第二连接部72r与第二可动部72m及第二致动器72连接。第二连接部72r使第二可动部72m产生与第二致动器72的移动相对应的移动。这些连接部例如是“连杆机构”。
53.第一连接部71r的一个部分固定到基架75b。第一连接部71r的另一部分固定到床架70b的第一可动部71m。通过第一致动器71来变更第一连接部71r的状态。由此,第一可动部71m的第一高度h1可以改变。
54.第二连接部72r的一个部分固定到基架75b。第二连接部72r的另一部分固定到床架70b的第二可动部72m。通过第二致动器72来变更第二连接部72r的状态。由此,第二可动部72m的第二高度h2可以改变。
55.在实施方式中,也可以省略连接部。或者,连接部也可以包括在致动器中。下面,对连接部与致动器分开设置时的例子进行说明。
56.控制装置90的控制部40控制第一致动器71。例如,通过第一致动器71的移动,第一连接部71r的状态改变,第一可动部71m移动。由此,第一高度h1变化。控制部40控制第二致动器72。例如,通过第二致动器72的移动,第二连接部72r的状态改变,第二可动部72m移动。由此,第二高度h2变化。
57.第一致动器71伸缩或旋转。通过第一致动器71的伸缩或旋转,可以改变第一连接部71r的状态。由此,第一可动部71m移动。第二致动器72伸缩或旋转。通过第二致动器72的伸缩或旋转,可以改变第二连接部72r的状态。由此,第二可动部72m移动。下面,对第一致动器71伸缩、第二致动器72伸缩的情况进行说明。
58.在第一致动器71的移动(例如伸缩)的变化量(第一变化量)和第一可动部71m的移动(第一高度h1的变化)的第二变化量之间存在确定的关系。将与该关系有关的信息设为第一关系信息。该关系例如基于第一致动器71的结构、第一连接部71r的结构及固定第一连接部71r的位置等。
59.同样地,在第二致动器72的移动(例如伸缩)的变化量(第三变化量)和第二可动部72m的移动(第二高度h2的变化)的第四变化量之间存在确定的关系。将与该关系有关的信息设为第二关系信息。该关系例如基于第二致动器72的结构、第二连接部72r的结构及固定第二连接部72r的位置等。
60.例如,在第一致动器71的伸缩的速度恒定的情况下,第一高度h1的变化的速度未必恒定。
61.在实施方式中,控制部40基于第一致动器71的轴的伸缩的第一变化量,控制第一致动器71的轴的伸缩的速度。例如,控制部40基于第一致动器71的伸缩量,控制第一致动器71的伸缩的速度。由此,可以提供能够更适当地控制可动部的移动的控制装置及床装置。例如,第一致动器71为第一长度时的第一致动器71的伸缩的速度不同于第一致动器71为第二长度时的第一致动器的伸缩的速度。例如,与第一致动器71的伸缩相对应的第一可动部71m
的移动(长度的变化)的速度实质上恒定。第一致动器71可以使第一可动部71m移动。通过第一致动器71的规定的变化而移动的第一可动部71m的第二变化量是规定的变化量。
62.例如,控制部40基于第一致动器71的移动的第一变化量控制第一致动器,以使除第一可动部71m的移动开始及移动结束以外的期间中的第一可动部71m的移动的速度实质上恒定。例如,控制部40例如基于第一关系信息控制第一致动器71。例如,控制部40基于第一关系信息控制(例如变更)第一致动器71的伸缩的速度,以使第一高度h1的变化的速度恒定。例如,控制部40基于第一关系信息控制(例如变更)第一致动器71的伸缩的速度,以使第一高度h1的变化处于期望的状态。由此,可以提供能够更适当地控制可动部的移动的控制装置及床装置。
63.控制部40例如也可以基于第二关系信息控制第二致动器71。例如,控制部40基于第二关系信息控制(例如变更)第二致动器72的伸缩的速度,以使第二高度h2的变化的速度恒定。例如,控制部40基于第二关系信息控制(例如变更)第二致动器72的伸缩的速度,以使第二高度h2的变化处于期望的状态。
64.控制部40也可以基于第一关系信息及第二关系信息中的至少任意一个,控制第一致动器71及第二致动器72。例如,也可以控制第一致动器71及第二致动器72,以使第一高度h1的变化的速度与第二高度h2的变化的速度实质上相同。例如,床架70b(第一可动部71m及第二可动部72m)保持期望的“姿势”,并且床架70b的高度可以改变。例如,在保持期望的“姿势”的同时可以使床架70b的高度的变化的速度实质上恒定。“姿势”例如是“水平”。在“水平”时,床架70b相对于x-y平面的角度例如是
±
3度以下。角度例如也可以是
±
2度以下。角度例如也可以是
±
1度以下。
65.下面,对控制装置90(或控制部40)的例子进行说明。
66.图3是例示第一实施方式的控制装置及床装置的示意图。
67.如图3所示,控制装置90(或床装置110)也可以包括存储部40m。存储部40m存储第一关系信息。存储部40m还可以存储第二关系信息。存储部40m也可以包括在控制部40中。存储部40m也可以与控制部40分开设置。
68.控制装置90(或床装置110)也可以包括获取部40i。获取部40i例如从存储部40m获取第一关系信息。获取部40i例如还可以从存储部40m获取第二关系信息。获取部40i也可以包括在控制部40中。获取部40i也可以与控制部40分开设置。
69.控制部40例如基于获取部40i获取的第一关系信息控制第一致动器71。控制部40例如也可以基于获取部40i获取的第二关系信息控制第二致动器72。
70.控制部40例如包括控制电路40a。从控制电路40a输出控制信号(例如,第一控制信号s1~第四控制信号s4等)。控制信号例如是电信号(例如电压)。
71.例如,第一控制信号s1从控制部40供给到第一致动器71。通过第一控制信号s1,第一致动器71移动、第一可动部71m移动。在图3中,省略第一连接部71r。
72.例如,第二控制信号s2从控制部40供给到第二致动器72。通过第二控制信号s2,第二致动器72移动、第二可动部72m移动。在图3中,省略第二连接部72r。
73.第一可动部71m及第二可动部72m包括在可动部70m中。可动部70m例如也可以包括背部底板70a及膝关节底板70b等。背部底板70a的角度例如由背部用致动器73a控制。膝关节底板70b的角度例如由膝关节用致动器73b控制。
74.第三控制信号s3从控制部40(例如,控制电路40a)供给到背部用致动器73a。由第三控制信号s3控制背部用致动器73a,并控制背部底板70a的角度。
75.第四控制信号s4从控制部40(例如,控制电路40a)供给到膝关节用致动器73b。由第四控制信号s4控制膝关节用致动器73b,并控制膝关节底板70b的角度。
76.也可以设置与背部用致动器73a的移动的变化量(例如伸缩量或旋转量)和背部底板70a的移动(角度)的变化量有关的第三关系信息。控制部40也可以基于第三关系信息控制背部用致动器73a。例如,在背部底板70a的角度大时和小时之间,有时背部底板70a相对于背部用致动器73a的移动(例如伸缩量)的角度的变化不同。也可以通过基于第三关系信息控制背部用致动器73a来以期望的角速度控制背部底板70a的角度。期望的角速度例如是实质上恒定的角速度。
77.也可以设置与膝关节用致动器73b的移动的变化量(例如伸缩量或旋转量)和膝关节底板70b的移动(角度)的变化量有关的第四关系信息。控制部40也可以基于第四关系信息控制膝关节用致动器73b。例如,在膝关节底板70b的角度大时和小时之间,有时膝关节底板70b相对于膝关节用致动器73b的移动(例如伸缩量)的角度的变化不同。也可以通过基于第四关系信息控制膝关节用致动器73b来以期望的角速度控制膝关节底板70b的角度。期望的角速度例如是实质上恒定的角速度。
[0078]“第一可动部”也可以是背部底板70a及膝关节底板70b中的一方。“第二可动部”也可以是背部底板70a及膝关节底板70b中的另一方。
[0079]
如图3所示,也可以设置有第一检测部71s。第一检测部71s检测第一致动器71的伸缩或旋转的状态。当第一致动器71伸缩时,将第一致动器71最短的状态下的长度设为最短宽度,将第一致动器71最长的状态下的长度设为最长宽度。例如,将最短宽度设为0%,将最长宽度设为100%。第一检测部71s检测第一致动器71的当前宽度(长度)。第一检测部71s检测的宽度(长度)为x1%(0≤x1≤100)。第一检测部71s检测的宽度(长度)与第一状态信息对应。控制部40也可以基于第一状态信息及第一关系信息控制第一致动器71。
[0080]
例如,也可以根据第一状态信息(例如位置信息)计算第一可动部71m的速度。控制部40也可以控制第一致动器71以达到目标速度。控制部40例如调整第一控制信号s1的电压以达到目标速度。例如,控制部40也可以根据第一状态信息(例如位置信息)变更目标速度。
[0081]
如图3所示,也可以设置第二检测部72s。第二检测部72s检测第二致动器72的伸缩或旋转的状态。第二检测部72s检测第二致动器72的当前宽度(长度)。第二检测部71s检测的宽度(长度)为x2%(0≤x2≤100)。第二检测部72s检测的宽度(长度)与第二状态信息对应。控制部40也可以基于第二状态信息及第二关系信息控制第二致动器72。
[0082]
例如,也可以根据第二状态信息(例如位置信息)计算第二可动部72m的速度。控制部40也可以控制第二致动器72以达到目标速度。控制部40例如调整第二控制信号s2的电压以达到目标速度。例如,控制部40也可以根据第二状态信息(例如位置信息)变更目标速度。
[0083]
如图3所示,也可以设置背部用检测部73as。背部用检测部73as检测背部用致动器73a的伸缩或旋转的状态。背部用检测部73as检测的宽度(长度)与第三状态信息对应。控制部40也可以基于第三状态信息及第三关系信息控制背部用致动器73a。
[0084]
如图3所示,也可以设置膝关节用检测部73bs。膝关节用检测部73bs检测膝关节用致动器73b的伸缩或旋转的状态。膝关节用检测部73bs检测的宽度(长度)与第四状态信息
对应。控制部40也可以基于第四状态信息及第四关系信息控制膝关节用致动器73b。
[0085]
下面,对致动器的移动的变化量和可动部70m的移动的变化量的关系的例子进行说明。
[0086]
图4的(a)及图4的(b)是例示第一实施方式的床装置的特性的曲线图。
[0087]
图4的(a)与第一致动器71及第一可动部71m对应。图4的(b)与第二致动器72及第二可动部72m对应。
[0088]
图4的(a)的横轴为第一致动器71的状态r1(%)。在该例中,状态r1与第一致动器71的伸缩的长度(宽度)对应。当状态r1为0%时,第一致动器71最短。当状态r1为100%时,第一致动器71最长。图4的(a)的纵轴为第一可动部71m的第一高度h1的变化量δh1。如图4的(a)所示,第一高度h1的变化量δh1与状态r1的变化具有特定的关系。该特定的关系与第一关系信息对应。
[0089]
图4的(b)的横轴为第二致动器72的状态r2(%)。在该例中,状态r2与第二致动器72的伸缩的长度(宽度)对应。当状态r2为0%时,第二致动器72最短。当状态r2为100%时,第二致动器72最长。图4的(b)的纵轴是第二可动部72m的第二高度h2的变化量δh2。如图4的(b)所示,第二高度h2的变化量δh2与状态r2的变化具有特定的关系。该特定的关系与第二关系信息对应。
[0090]
第二关系信息的特性(曲线)有时与第一关系信息的特性(曲线)不一致。
[0091]
从图4的(a)可以看出,例如,使状态r1以恒定的速度变化且使第一致动器71以恒定的速度伸缩时,第一高度h1的变化量δh1不以恒定的速度变化。
[0092]
在实施方式中,控制部40基于第一关系信息控制第一致动器71。例如,控制部40改变第一致动器71的状态r1(长度),以使第一高度h1的变化量δh1以实质上恒定的速度变化。可以使第一可动部71m的第一高度h1以期望的状态(例如恒定的速度)变化。
[0093]
从图4的(b)可以看出,例如,使状态r2以恒定的速度变化且使第二致动器72以恒定的速度伸缩时,第二高度h2的变化量δh2不以恒定的速度变化。
[0094]
在实施方式中,控制部40基于第二关系信息控制第二致动器72。例如,控制部40改变第二致动器72的状态r2(长度),以使第二高度h2的变化量δh2以实质上恒定的速度变化。可以使第二可动部72m的第二高度h2以期望的状态(例如恒定的速度)变化。
[0095]
例如,可以确定状态r1(例如,伸长量)为0%时的第一可动部71m的速度。可以确定状态r1(例如,伸长量)为100%时的第一可动部71m的速度。例如,可以基于第一关系信息确定状态r1(例如,伸长量)为1%~99%中的任意值时的第一可动部71m的速度。
[0096]
例如,可以确定状态r2(例如,伸长量)为0%时的第二可动部72m的速度。可以确定状态r2(例如,伸长量)为100%时的第二可动部72m的速度。例如,可以基于第二关系信息来确定状态r2(例如,伸长量)为1%~99%中的任意值时的第二可动部72m的速度。
[0097]
图5的(a)及图5的(b)是例示第一实施方式的控制装置及床装置的动作的曲线图。
[0098]
图5的(a)对应于第一可动部71m,图5的(b)对应于第二可动部72m。这些图的横轴为时间tm。图5的(a)的纵轴为第一可动部71m的第一高度h1的变化的速度sm。图5的(b)的纵轴为第二可动部72m的第二高度h2的变化的速度sm。这些图是基于控制部40的控制的例子。
[0099]
如图5的(a)所示,由控制部40控制第一致动器71,第一可动部71m在第一时刻t1开始移动。在第二时刻t2,第一可动部71m的移动结束。从第一时刻t1到第一时刻t1之后的第
三时刻t3的期间p1是移动开始的期间。从第四时刻t4到第二时刻t2的期间p3是移动结束的时间。在从第三时刻t3到第四时刻t4的期间p2中,例如第一可动部71m以实质上恒定的速度sm移动。
[0100]
通过控制部40基于第一关系信息控制第一可动部71m,获得例如图5的(a)例示的动作。例如,在移动开始的期间p1,速度sm逐渐上升。例如,在移动结束的期间p3,速度sm逐渐减少。通过这样的动作,可以减少用户的违和感。
[0101]
在实施方式中,例如,控制部40控制第一致动器71,以使除第一可动部71m的移动开始及移动结束以外的期间(期间p2)的第一可动部71m的移动速度sm(第一速度)实质上恒定。
[0102]
如图5的(b)所示,例如,第二可动部72m从第一时刻t1开始移动。在第二时刻t2,第二可动部72m的移动结束。在从第三时刻t3到第四时刻t4的期间p2中,例如,第二可动部72m以实质上恒定的速度sm移动。
[0103]
在实施方式中,例如,控制部40控制第二致动器72,以使除第二可动部72m的移动开始及移动结束以外的期间(期间p2)的第二可动部72m的移动速度sm(第二速度)实质上恒定。
[0104]
在实施方式中,控制部40也可以采用与图5的(a)及图5的(b)的例子不同的配置(profile)来控制第一可动部71m及第二可动部72m。
[0105]
控制部40也可以同时控制第一致动器71及第二致动器72。
[0106]
图6是例示第一实施方式的控制装置及床装置的动作的曲线图。
[0107]
图6的横轴是致动器的状态r(%)。致动器的状态r是第一致动器71的状态r1或第二致动器72的状态r2。图6的纵轴是致动器的伸缩的速度sa。在图6中示出了第一致动器71的控制特性及第二致动器72的控制特性。
[0108]
在该例中,第二致动器72的伸缩的速度sa恒定。在该情况下,第二可动部72m的第二高度h2根据图4的(b)所示的特性(变化量δh2)变化。
[0109]
如图6所示,第一致动器71的伸缩的速度sa根据状态r(状态r1)来变更。速度sa的变更(控制)由控制部40进行。由于从控制部40供给的第一控制信号s1(例如电压)被变更,因此第一致动器71的伸缩的速度sa发生变化。
[0110]
变更(控制)第一致动器71的伸缩的速度sa,例如以使根据第一致动器71的伸缩而变化的第一高度h1的变化的速度sm与根据第二致动器72的伸缩而变化的第二高度h2的变化的速度sm实质上一致。由此,例如,可以在维持水平状态的同时,变更床架70b的高度。
[0111]
图7的(a)~图7的(c)是例示第一实施方式的控制装置及床装置的动作的示意图。
[0112]
图7的(a)是曲线图。图7的(a)的横轴为致动器的状态r(%)。图7(a)的纵轴为致动器的伸缩的速度sa。在图7的(a)中,示出了第一致动器71的控制特性及第二致动器72的控制特性。图7的(b)例示状态r为0%时的致动器。图7的(c)例示状态r为100%时的致动器。在第一致动器71中,状态r为0%时和100%时的期间中的长度之差为差71d。在第二致动器72中,状态r为0%时和100%时的期间中的长度之差为差72d。如图7的(b)及图7的(c)所示,在该例中,差71d与差72d不同。
[0113]
在该例中,第一致动器71的伸缩的速度sa及第二致动器72的伸缩的速度sa根据致动器的状态r而变更。例如,控制部40基于第一关系信息变更第一致动器71的伸缩的速度
sa。例如,控制部40基于第二关系信息变更第二致动器72的伸缩的速度sa。例如,由于从控制部40供给的第一控制信号s1(例如电压)及第二控制信号s2(例如电压)被变更,因此第一致动器71及第二致动器72的伸缩的速度sa发生变化。
[0114]
例如,第一可动部71m的第一高度h1的变化的速度sm例如可以与第二可动部72m的第二高度h2的变化的速度sm实质上相同。例如,能够在维持水平状态的同时变更床架70b的高度。
[0115]
例如,床架70b的最低高度设计得较低。由此,例如,可以提供易于使用的床70。在该情况下,在最低高度设计得较低的床70中,对床架70b的升降部的限制变得严格。因此,难以在保持水平的同时使床架70b升降。
[0116]
在实施方式中,例如,通过基于第一关系信息控制第一致动器71,即使在最低高度较低的情况下,也能够在保持水平的同时使床架70b升降。
[0117]
(第二实施方式)
[0118]
第二实施方式涉及床装置110。床装置110包括上述的控制装置90、上述的第一可动部71m及上述的第一致动器71。床装置110也可以还包括上述的第二可动部72m及上述的第二致动器72。床装置110也可以还包括上述的第一连接部71r及上述的第二连接部72r。根据第二实施方式的床装置110,可以提供能够更适当地控制可动部70m的移动的床装置。
[0119]
在第一实施方式及第二实施方式中,可动部70m也可以是背部底板70a。可动部70m也可以是膝关节底板70b。
[0120]
下面,对实施方式的床装置的例子进行说明。
[0121]
图8是例示实施方式的床装置的示意性立体图。
[0122]
如图8所示,在床装置310中,包括头右侧侧边护栏320、脚右侧侧边护栏330、头左侧侧边护栏340、脚左侧侧边护栏350、床头板360及床尾板370。
[0123]
这些侧边护栏例如设置于床310b的框架390f上。在床310b的框架390f上设置有底板(在图8中未图示),在其上设置有床垫390m。床310b的用户可以躺在床垫390m上。床装置310例如在医院、疗养院或家庭等中使用。
[0124]
床装置310例如是电动床。床装置310可以由床310b的用户或照料者等操作。
[0125]
头右侧侧边护栏320及头左侧侧边护栏340的角度(例如,以水平面为基准时的角度)可以变更。例如,可以实现背部抬高或背部降低等。例如,通过改变背部底板70a(参照图16的(b))的角度,安装于背部底板70a上的头右侧侧边护栏320及头左侧侧边护栏340的角度跟随背部底板70a而变化。
[0126]
脚右侧侧边护栏330及脚左侧侧边护栏350的高度可以变更。当脚右侧侧边护栏330及脚左侧侧边护栏350处于高的位置时,例如,可以预防用户从床310b上掉下来。当脚右侧侧边护栏330及脚左侧侧边护栏350处于低的位置时,例如,用户容易从脚右侧侧边护栏330及脚左侧侧边护栏350的上方离开床310b。
[0127]
头右侧侧边护栏320包括外侧面320f及内侧面320g。脚右侧侧边护栏330包括外侧面330f及内侧面330g。头左侧侧边护栏340包括外侧面340f及内侧面340g。头左侧侧边护栏340包括外侧面350f及内侧面350g。
[0128]
在头右侧侧边护栏320的外侧面320f及内侧面320g以及头左侧侧边护栏340的外侧面340f及内侧面340g设置有各种开关等。外侧面的开关例如设计成便于照料者或医护人
员(例如,医生、护士或物理治疗师等)进行操作。在这些内侧面也设置有各种开关等。内侧面的开关例如设计成便于床310b的用户进行操作。这些开关的例子将在后面描述。
[0129]
在头右侧侧边护栏320、脚右侧侧边护栏330、头左侧侧边护栏340及脚左侧侧边护栏350的各自的上部分设置有扶手325g、335g、345g及355g。这些扶手的上下方向的宽度在内侧比外侧窄。由此,例如,用户容易抓握这些扶手。
[0130]
在脚右侧侧边护栏330及脚左侧侧边护栏350每个侧边护栏中,扶手335g及355g的上表面的宽度被设计得较宽。用户可以坐在它们的上表面(端座)。由此,例如,当用户端座时,大腿的里侧不会痛。
[0131]
在头右侧侧边护栏320的外侧面320f及头左侧侧边护栏340的外侧面340f设置有凹部。可以将床操作装置380安装在该凹部。此外,可以将床操作装置380安装在床尾板370的外侧面370f。对于床操作装置380,将在后面进行描述。
[0132]
下面,对侧边护栏的例子进行说明。
[0133]
图9的(a)~图9的(c)是例示实施方式的床装置的一部分的示意图。
[0134]
如图9的(a)所示,在头右侧侧边护栏320的上部分设置有贯通孔325h。由贯通孔325h形成扶手325g。
[0135]
在头右侧侧边护栏320的上部分,还设置有凸部325a、凹部325b、头侧凸部325c及头侧凹部325d。凸部325a例如可以用作支承用户的身体的支承部。当头右侧侧边护栏320立起时(背部抬高状态),凹部325b例如可以用作支承用户的身体的支承部。
[0136]
用户容易抓握头侧凸部325c。例如,背部抬高或背部降低时,容易由头侧凸部325c支承用户的身体。在头侧凸部325c设置有贯通孔。由此,头侧凸部325c可以用作扶手。
[0137]
可以将医疗用的各种线放入头侧凹部325d。各种线易于稳定。医疗用的各种线例如包括人工呼吸器及各种me设备等的线缆或管。通过使各种线穿过头侧凹部325d,例如可以抑制这些线缠绕在一起。
[0138]
在头右侧侧边护栏320的外侧面320f设置有开关部323、角度计324、贯通孔325e(例如钩部)及下部贯通孔325f(例如哈伦包钩(harun bag hook))。可以将床操作装置380悬挂在贯通孔325e中。可以将哈伦包悬挂在下部贯通孔325f中。可以将垃圾箱等悬挂在下部贯通孔325f中。例如,在贯通孔325e的下方设置有孔328h。床操作装置380的线缆可以穿过孔328h。线缆经由孔328h与设置于床装置310上的连接器电连接。可以抑制线缆落在地板上。可以缩短线缆。
[0139]
图9的(b)例示了开关部323。
[0140]
开关部323例如是膜片开关(例如,医护人员用膜片开关)。开关部323包括开关323a~323q。
[0141]
当按下开关323a时,进行“心脏抬高(
カーディアック
上
げ
)”。当按下开关323b时,进行“心脏降低”。通过“心脏抬高”,床310b成为心脏位置(参照图16的(b)))。在“心脏抬高”朝向心脏位置,且背部底板70a和膝关节底板70b的角度不会变得非常小的状态下,在确保膝关节底板70b比水平角度抬高的状态的同时,床310b动作。在背部底板70a和膝关节底板70b的角度不会变得非常小的状态下,角度小于90度。在背部底板70a和膝关节底板70b的角度不会变得非常小的状态下,可以在防止腹部压力过度施加给用户的同时,保持舒适的姿势。例如,如果使膝关节倾斜而不抬高,则有时用户会滑落。通过使膝关节底板70b形成比水平
角度抬高的状态来抑制用户滑落。通过“心脏降低”,朝向背部角度为0度、膝关节角度为0度、倾斜角度为0度的状态,在背部底板70a和膝关节底板70b之间的角度不会变得非常小的状态下,在保持膝关节底板70b比水平角度抬高的状态的同时,床310b动作。
[0142]
当按下开关323c时,进行“反向展伸”。当按下开关323h时,进行“展伸”。在“展伸”中,头部降低。在“反向展伸”中,脚部降低。
[0143]
当按下开关323d时,进行“连锁抬高(
カインド
上
げ
)”。在“连锁抬高”中,背部底板70a及膝关节底板70b的角度联动地变化。当按下开关323i时,进行“连锁降低”。在“连锁降低”中,这些底板的角度联动地变化。例如,当背部底板70a及膝关节底板70b的角度联动地变大时,首先,膝关节底板70b的角度变大,之后,其他底板的角度变大。由此,抑制患者(用户)偏移。在“连锁抬高”中,背部底板70a的角度为70度的状态对应于动作完成角度。膝关节底板70b的角度为追随背部底板70a的角度后的角度。
[0144]
在“连锁抬高”中,最初,背部角度为0度,膝关节角度为0度。接着,背部角度变为5度,膝关节角度变为0度。然后,背部角度变为15度,膝关节角度变为10度。然后,背部角度变为30度,膝关节角度变为25度,背部角度变为50度,膝关节角度变为25度。之后,背部角度变为70度,膝关节角度变为0度。在“连锁抬高”中,背部角度及膝关节角度联动地变大,直到中途为止。变为某一背部角度以上时,膝关节角度向0度变小。
[0145]
在“连锁降低”中,最初,背部角度为70度,膝关节角度为0度。接着,背部角度变为50度,膝关节角度变为25度。然后,背部角度变为30度,膝关节角度变为25度。然后,背部角度变为15度,膝关节角度变为20度。然后,背部角度变为0度,膝关节角度变为5度。之后,背部角度变为0度,膝关节角度变为0度。
[0146]
当按下开关323e时,进行“背部抬高”。当按下开关323j时,进行“背部降低”。
[0147]
当按下开关323f时,进行“膝关节抬高”。当按下开关323k时,进行“膝关节降低”。
[0148]
当按压开关323g时,进行“高度升高”。当按下开关323l时,进行“高度降低”。当床310b在倾斜状态下升高高度时,维持倾斜角度不变而高度升高。“降低”也一样。另外,在倾斜状态下进一步达到最高床高时,床310b暂时停止。在床310b停止后再次按下高度升高按钮(开关323g)时,优先抬高床310b的高度,在使倾斜角度变为0度的同时高度升高。“降低”也一样。
[0149]
用于“升高”的开关323c~323g比用于“降低”的开关323h~323l靠上。例如,床310b的用户有可能无意识地碰触开关部323的开关。这时,相比下侧部分,床310b的用户更容易碰触上侧部分。由于用于“升高”的开关323c~323g处于上侧,因此即使在用户误碰了上侧部分的情况下,与碰触开关323h~323l的情况相比,能够进一步抑制风险。
[0150]
当按下开关323m时,进行“cpr降低”。在“cpr降低”中,处于适合cpr(cardio pulmonary resuscitation:心肺复苏)的床状态。在“cpr降低”的状态下,膝关节底板70b及脚部底板70c变平。在“cpr降低”中,床310b的床高降低。在倾斜状态的情况下,倾斜角度也变为0度。例如,动作顺序如下。将背部角度设为0度(在移动背部底板70a期间,膝关节底板也接近0度)。接着,将倾斜角度设为0度。接着,降低高度。接着,将膝关节角度设为0度。例如,床310b也可以变为最低床高的状态。例如,在床310b中,也可以通过“高度降低”的动作来设置暂时停止的位置(暂时停止高度)。在“cpr降低”之前的状态下,在高度高于该暂时停止高度的情况下,通过“cpr降低”,床310b的高度被设为暂时停止高度。在暂时停止高度,从
床到底板上表面的距离约为42cm。
[0151]
例如,在一个例子中,当开关323m被“长按”时,进行“cpr降低”。“长按”的时间例如为2秒以上。在另一例子中,当开关323m被“按下两次”时,进行“cpr降低”。在开关323m被“按下两次”的情况下,“第一次按下”和“第二次按下”之间的时间为5秒以内。
[0152]
cpr动作以外的动作在按下按钮时开始动作。由于cpr动作是在紧急时迅速地进行动作,所以操作cpr动作的按钮(开关323m)的人有时会犹豫按下cpr动作的按钮。如上所述,例如,通过“长按”或“按下两次”开关323m,进行cpr动作。由此,可以豪不犹豫地进行cpr动作。
[0153]“cpr降低”是电动cpr动作。除此以外,也可以通过手动进行cpr动作。
[0154]
开关323n是“护士呼唤器”。当按下开关323n时,进行护士呼叫发送。信息被传递到护士呼叫系统。
[0155]
当按下开关323o时,设置于头右侧侧边护栏320的内侧面320g的开关(在后面描述)的操作处于“禁止状态”。当按下开关323p时,与床310b的移动(致动器)有关的所有操作都处于“禁止状态”。在该情况下,“护士呼唤器”及脚底灯等可以动作。
[0156]
当按下开关323q时,设置于床310b等上的脚底灯点亮。
[0157]
在该例中,开关部323包括显示323r~323t。显示323r显示电池的余量。显示323s在床高不是最低时点亮(例如橙色)。显示323s在床高最低时熄灭。
[0158]
显示323t进行故障显示。在正常时,显示323t消失。在“u类异常”时,重复点亮1秒、熄灭1秒。在“h类异常”时,重复点亮0.2秒、熄灭0.2秒。
[0159]
外侧面320f的开关部323(例如,医护人员用膜片开关)的操作优先于设置在内侧面320g的后面将描述的开关部(例如,用户用膜片开关)的操作。例如,当同时按下外侧和内侧的开关时,什么动作都不做。例如,当在外侧进行背部抬高,并在内侧按下膝关节抬高按钮时,床310b停止。当松开双方的按钮并重新按下时,床310b动作。
[0160]
图9的(c)例示设置于头右侧侧边护栏320的外侧面320f的角度计324。
[0161]
在头右侧侧边护栏320设置有凹部,由设置于该凹部的球体(例如金属球)构成角度计324。当背部底板抬高时,球体在凹部中滚动。角度计324的显示部324a的角度显示根据球体的位置而变化。通过角度计324,可以了解背部角度的大概。
[0162]
图10的(a)及图10的(b)是例示实施方式的床装置的一部分的示意图。
[0163]
如图10的(a)所示,在头右侧侧边护栏320的内侧面320g设置有凹部328。凹部328可以用作钩。在凹部328的下方设置有孔328h。另外,在内侧面320g设置有开关部327。开关部327例如是膜片开关(例如,用户用膜片开关或患者用膜片开关)。
[0164]
如图10的(b)所示,开关部327包括开关327a~327d。开关部327也可以包括开关327n。
[0165]
当按下开关327a时,进行“脚部抬高”。当按下开关327c时,进行“脚部降低”。
[0166]
当按下开关327b时,进行“背部抬高”。当按下开关327d时,进行“背部降低”。
[0167]
在内侧面320g设置有开关327n。开关327n是“护士呼唤器”。
[0168]
在内侧面320g设置有usb端子327u。usb插头可以插入usb端子327u中,并且可以充电等。
[0169]
如上所述的头右侧侧边护栏320的结构也适用于头左侧侧边护栏340。
[0170]
图11的(a)~图11的(c)是例示实施方式的床装置的一部分的示意图。
[0171]
图11的(a)及图11的(b)例示设置于头左侧侧边护栏340的外侧面340f的开关部343及角度计344。如图11的(a)所示,开关部343包括开关343a~343q。开关343a~343q具有与开关323a~323q同样的功能。在该例中,开关部343包括显示343r~343t。显示343r~343t具有与显示323r~323t同样的功能。
[0172]
图11的(b)例示角度计344。角度计344具有与角度计324同样的结构及功能。通过角度计344的显示部344a,可以了解背部角度的大概。
[0173]
如图11的(c)所示,在头左侧侧边护栏340的内侧面340g(参照图8)设置有开关部347。开关部347具有与开关部327同样的结构及功能。开关部347包括开关347a~347d。开关347a~347d具有与开关327a~327d同样的功能。在内侧面320g设置有开关347n及usb端子347u。也可以省略usb端子347u。
[0174]
图12的(a)及图12的(b)是例示实施方式的床装置的一部分的示意图。
[0175]
如图12的(a)所示,在脚右侧侧边护栏330设置有扶手335g。扶手335g由贯通孔335h形成。在脚右侧侧边护栏330的下部设置有下部贯通孔335f(例如哈伦包钩)。可以将哈伦包等悬挂在下部贯通孔335f中。
[0176]
在脚右侧侧边护栏330的外侧面330f设置有角度计334(参照图12(b))。角度计334具有与角度计324同样的结构。通过角度计334的显示部334a可以了解角度的大概。
[0177]
图13是例示实施方式的床装置的一部分的示意图。
[0178]
如图13所示,由形成于脚右侧侧边护栏330的贯通孔335h获得扶手335g。
[0179]
图14是例示实施方式的床装置的一部分的示意图。
[0180]
图14例示设置于脚左侧侧边护栏350的外侧面350f的角度计354。角度计354具有与角度计324同样的结构。通过角度计354的显示部354a可以了解角度的大概。
[0181]
图15的(a)及图15的(b)是例示实施方式的床装置的一部分的示意图。
[0182]
如图15的(a)所示,在床尾板370的外侧面370f设置有贯通孔375e(例如钩部)。可以将床操作装置380悬挂在贯通孔375e中。如图15的(b)所示,贯通孔375e贯通到床尾板370的内侧面370g。
[0183]
在床操作装置380中,可以显示与床310b有关的各种设定和用户的体重。作为床操作装置380中的“物理按钮”,设置有“主页按钮”。对于床操作装置380的例子,将在后面进行描述。
[0184]
图16的(a)~图16的(c)是例示实施方式的床装置的动作的示意性立体图。
[0185]
这些图例示没有设置床垫390m时的状态。
[0186]
如图16的(a)所示,在床310b上,在基架390b上安装有框架390f。在框架390f上设置有背部底板70a(back section:背部)、膝关节底板70b(upper leg section:大腿部分)及脚部底板70c(lower leg section:小腿部分)等。在该例中,设置有腰部底板70e。也可以在基架390b上设置脚轮390c。
[0187]
如图16的(a)所示,在床装置310中,可以变更框架390f的角度(倾斜)。除了前后倾斜以外,倾斜也可以包括左右倾斜。
[0188]
如图16的(b)所示,在床装置310中,背部底板70a、膝关节底板70b及脚部底板70c各自的角度可以变更。头右侧侧边护栏320及头左侧侧边护栏340的角度根据背部底板70a
的角度的变更而变化。头右侧侧边护栏320及头左侧侧边护栏340是随动型侧边护栏。图16的(b)的状态对应于心脏位置。
[0189]
在图16的(b)的例子中,脚右侧侧边护栏330及脚左侧侧边护栏350是“上状态”。
[0190]
如图16的(c)所示,脚右侧侧边护栏330及脚左侧侧边护栏350可以设为“下状态”。
[0191]
如图16的(b)及图16的(c)所示,床310b的高度可以变更。高度例如对应于床310b的上表面(例如,底板的上表面)和地板面之间的距离。
[0192]
图17的(a)及图17的(b)是例示实施方式的床装置的使用状态的示意性立体图。
[0193]
图17的(a)例示床310b低的状态。这时,照料者等398(例如,照料者或医护人员等)可以在从钩部(例如,头右侧侧边护栏320的贯通孔325e)移开的状态下操作床操作装置380。
[0194]
图17的(b)例示床310b高的状态。这时,照料者等399等可以在安装到钩部的状态下操作床操作装置380。床操作装置380例如安装到三个部位的钩部。三个部位的钩部是头右侧侧边护栏320的贯通孔325e、头左侧侧边护栏340的贯通孔345e及床尾板370的贯通孔375e。
[0195]
下面,对床装置310中的电气元件的例子进行说明。
[0196]
图18是例示实施方式的床装置的示意图。
[0197]
如图18所示,在床装置310中设置有控制箱410。除此以外,在床装置310中设置有各种装置。各种装置包括接线盒420、膜片开关430、脚底灯440、侧边护栏传感器450(sr传感器)、脚轮锁传感器455(cl传感器)、护士呼唤器457a、护士呼唤器457b、护士呼叫中继单元458、称重单元460、负载传感器465、致动器470及电池475等。也可以省略各种装置的一部分。
[0198]
控制箱410可以与各种装置连接。控制箱410和各种装置之间的连接可以直接或经由接线盒420进行。控制箱410进行床动作及各种功能的控制。控制箱410是床装置310中的串行通信主机。
[0199]
在控制箱410设置有插头410p(例如,三针插头)。从插头410p向控制箱410供电。从控制箱410向各种设备供电。
[0200]
接线盒420中继控制箱410和其他各种设备之间的连接。
[0201]
膜片开关430包括医护人员用膜片开关430a及430b。这些膜片开关对应于开关部323及343。膜片开关430包括患者用膜片开关430c及430d。这些膜片开关对应于开关部327及347。医护人员用膜片开关430a及患者用膜片开关430c经由中继单元431a与接线盒420连接。医护人员用膜片开关430b及患者用膜片开关430d经由中继单元431b与接线盒420连接。
[0202]
在医护人员用膜片开关430a及430b上设置有床操作按钮(开关)。如前所述,床操作按钮包括心脏操作按钮(例如,联动操作按钮)、展伸/反向展伸按钮、连锁动作操作按钮(例如,另一个联动操作按钮)、cpr按钮、护士呼唤器按钮、患者用膜片开关禁止按钮及所有开关禁止按钮等。通过这些床操作按钮对开关部323及343进行已说明的动作。
[0203]
在患者用膜片开关430c及430d上设置有床操作按钮。如前所述,床操作按钮包括背部底板操作按钮、膝关节底板操作按钮及护士呼唤器按钮。患者用膜片开关430c及430d也可以包括充电用端子等。
[0204]
在医护人员用膜片开关430a及430b和患者用膜片开关430c及430d中,床操作按钮
设置于上下方向的中间位置。如果床操作按钮处于下部,则难以操作。如果床操作按钮处于上部,则有时会被误操作。由于床操作按钮处于上下方向的中间位置,操作变得容易,可以抑制误操作。
[0205]
脚底灯按钮对应于开关323q及343q。当按下脚底灯按钮时,脚底灯440发光。由脚底灯440进行从床310b的端部到地板面的照明。脚底灯440例如在床310b的左右各设置有一个。脚底灯440例如设置于腰部底板70e的后侧(下侧)的左右端部。脚底灯440也可以设置于背部底板70a、膝关节底板70b及脚部底板70c(参照图16的(b)等)等其他部分。例如,每当按下脚底灯按钮(开关323q及343q),在脚底灯440中,重复进行熄灭
→
弱光点亮
→
强光点亮
→
熄灭。例如,由医护人员点亮脚底灯440。例如,在用户去厕所的频率高的情况下等,在用户就寝前,医护人员点亮脚底灯440。例如,在检测到离床或发生护士呼叫的情况下等,医护人员点亮脚底灯440。
[0206]
例如,床310b的用户在夜间由于去卫生间等而离开床时,脚底灯440点亮。这时,室内通常较暗。当脚底灯440突然明亮地点亮时,会给在周围睡觉的人带来麻烦。通过最初较暗地点亮,抑制了麻烦。
[0207]
侧边护栏传感器450检测各侧边护栏是否正在升高。设置有四个侧边护栏传感器450。四个侧边护栏传感器450包括头右侧用侧边护栏传感器、头左侧用侧边护栏传感器、脚右侧用侧边护栏传感器及脚左侧用侧边护栏传感器。检测结果例如显示于护士站的终端。检测结果也可以显示于床操作装置380。也可以基于检测结果发出警报。作为侧边护栏传感器450,例如,使用磁传感器或气压传感器等。也可以使用其他传感器作为侧边护栏传感器450。
[0208]
脚轮锁传感器455检测脚轮390c是否被锁定。例如,使用磁传感器作为脚轮锁传感器455。例如,在脚轮390c中,设置有与脚轮390c的锁定或解锁联动的杆等。通过检测杆的状态,可以检测脚轮390c的锁定状态。脚轮锁传感器455的检测结果例如显示于护士站的终端。检测结果也可以显示于床操作装置380。也可以基于脚轮锁传感器455的检测结果发出警报。
[0209]
护士呼唤器457a与接线盒420连接。护士呼唤器457b与护士呼叫中继单元458连接。通过护士呼叫中继单元458,可以与设置于医院及设施上的护士呼唤器(例如,护士呼唤器457b)一起工作。护士呼唤器457a及457b是国内制作或外国制造的护士呼唤器。例如,护士呼唤器457a是外国制造。例如,护士呼唤器457b是国内制造。
[0210]
负载传感器465设置于床310b的四个角部。使用四个负载传感器465。通过负载传感器465及称重单元460可以测量用户的体重。
[0211]
致动器470包括高度变更用致动器470a(“hlact”)、膝关节底板70b用致动器470b(“膝关节act”)、背部底板70a用致动器470c(带cpr的“背部act”)及高度变更用致动器470d(“hlact”)等。致动器470a及470d包括载荷传感器。
[0212]
在一个例子中,背部底板70a用致动器470c包括用于手动进行降低动作的机械机构(下面,称为手动cpr机构)。通过手动cpr机构,紧急时,可以手动降低背部底板70a。例如,设置有专用杆等,通过操作该杆,可以手动降低背部底板70a,以获得cpr用的姿势。例如,可以通过手动挪动背部底板70a用致动器470c的制动板。由此,致动器470c的制动被解除,背部底板70a因自重而降低。
[0213]
致动器470是调节床310b中包括的可动部的驱动源。致动器470通过伸缩杆的动作,经由连接部等使可动部动作。在每个致动器上设置有位置传感器。位置信息由控制箱410读取。也可以由致动器470的载荷传感器进行床310b上的用户(患者等)的移动(例如包括离床)的判断。
[0214]
电池475在停电时或床310b运输期间等供给电力。即使在没有电力供给的状况下也可获得期望的动作。也可以设置进行/不进行对电池475的充电的切换开关。无论切换开关状态如何,只要是向床310b供给电力(ac电源)的状态,就能够充电。
[0215]
例如,在床装置310被ac电源驱动时,从控制箱410向电池475、充气床垫控制单元482及usb充电器488(参照图18)供给电力。不从ac电源供给电力时,从电池475向控制箱410、充气床垫控制单元482及usb充电器488供给电力。在不从ac电源供给电力、也不从电池475供给电力的情况下,床310b不动作。
[0216]
如图18所示,在床装置310中,设置有睡眠传感器481、充气床垫控制单元482及床操作装置380。在床装置310中,也可以设置有手动开关483。
[0217]
睡眠传感器481测定床310b的用户(患者等)的睡眠状况。在设置有床操作装置380的情况下,睡眠状况的测定结果及睡眠历史也可以输出(例如显示)到床操作装置380。
[0218]
例如,在控制箱410上设置有充气床垫控制单元482用的连接器。在充气床垫中,也可以进行与床310b的姿势吻合的联动动作。联动动作也可以根据充气床垫的种类而不同。也可以由床操作装置380进行充气床垫的动作的设定及变更。
[0219]
在床装置310中还设置有辅助插座485。在该例中,设置有两个辅助插座485。辅助插座485是插头接收装置。辅助插座485包括插头485p。插头485p是满足医用标准的插头。插头485p是三针插头。插头485p与控制箱410的插头410p分开设置。
[0220]
床装置310也可以包括usb充电器488(参照图18)。usb充电器488对应于usb端子327u(或347u)。usb充电器488进行向与usb充电相对应的设备的供电。usb充电器488的端口数量也可以是一个。usb充电器488的输出额定值为dc5v/1a。端口设置于右侧侧边护栏的患者用膜片开关430c。
[0221]
床装置310也可以包括故障显示用led。故障显示用led对应于显示323t及343t。
[0222]
在床装置310中,也可以检测床310b的用户的离床。例如,通过负载传感器465检测离床。例如,通过内置于致动器中的载荷传感器检测离床。与离床有关的信息被传递至护士呼叫系统,并输出到护士站的终端。与离床有关的信息也可以输出到床操作装置380。与离床有关的信息的输出例如也可以包括灯光等视觉刺激或像警报那样的听觉刺激。
[0223]
下面,对床操作装置380的例子进行说明。
[0224]
床操作装置380与床310b连接。在床操作装置380中,可以实施与床310b有关的设定并进行显示。可以进行床操作装置380的显示语言的切换。例如,可以用日语、英语、汉语或葡萄牙语显示。床操作装置380例如安装在左右的侧边护栏或床尾板370上。
[0225]
设置于床装置310中的床操作装置380的最大数量例如为三个。在一个例中,在床310b上连接有一个床操作装置380或一个手动开关483(后述)。在另一个例子中,在床310b上连接有一个床操作装置380及一个手动开关483。在另一个例子中,在床310b上连接有两个床操作装置380。在另一个例子中,在床310b上连接有两个床操作装置380及一个手动开关483。在另一个例子中,在床310b上连接有三个床操作装置380。
[0226]
图19的(a)及图19的(b)是例示实施方式的床装置的一部分的示意图。
[0227]
图19的(a)主要例示了设置在头侧侧边护栏(头右侧侧边护栏320或头左侧侧边护栏340)上的床操作装置380。床操作装置380包括显示输入部380d。在床操作装置380上设置有主页按钮380h。
[0228]
如图19的(b)所示,在显示输入部380d可以进行各种显示。通过显示输入部380d,可以显示床310b的姿势及用户的体重。通过显示输入部380d,可以进行离床传感器的设定。通过显示输入部380d,可以进行关于睡眠传感器481的显示。通过显示输入部380d,可以进行充气床垫的操作。通过显示输入部380d,可以进行故障的显示。
[0229]
图20的(a)及图20的(b)是例示实施方式的床装置的一部分的示意图。
[0230]
图20的(a)主要例示设置于床尾板370上的床操作装置380。床操作装置380包括显示输入部380d。在床操作装置380上,除了主页按钮380h以外,还设置有上升按钮380a、下降按钮380b及cpr按钮380c。通过上升按钮380a或下降按钮380b,进行床310b的可动部的上升或下降。通过cpr按钮380c,转换为cpr用的姿势。
[0231]
如图20的(b)所示,在显示输入部380d可以进行各种显示。通过显示输入部380d,可以进行床310b的操作。床操作例如包括心脏动作、倾斜动作、联动动作(连锁动作)、背部抬高降低、膝关节抬高降低及高度升高降低等。通过显示输入部380d,可以显示用户的体重。通过显示输入部380d,可以进行离床传感器的设定。通过显示输入部380d,可以进行与睡眠传感器481有关的显示。通过显示输入部380d,可以进行充气床垫的操作。通过显示输入部380d,可以进行故障的显示。
[0232]
下面,对手动开关483的例子进行说明。
[0233]
图21是例示实施方式的床装置的一部分的示意图。
[0234]
图21例示手动开关483。手动开关483包括开关对483a~483d。开关对483a包括用于与“联动”动作有关的上升或下降的开关。开关对483b包括用于与“背部抬高”动作有关的上升或下降的开关。开关对483c包括用于与“脚部抬高”动作有关的上升或下降的开关。开关对483d包括用于与“高度”变更动作有关的上升或下降的开关。
[0235]
也可以在手动开关483的显示部483d显示角度或高度。例如,手动开关483通过线缆483e等与控制箱410连接。
[0236]
下面,对辅助插座485的例子进行说明。
[0237]
图22是例示实施方式的床装置的一部分的示意性立体图。
[0238]
图22例示辅助插座485(例如插头接收装置)。在床310b的周边使用的电子设备类的插头能够与辅助插座485连接。如前所述,辅助插座485的插头485p与控制箱410的插头410p分开设置。辅助插座485具有两组插头接收器(插头的插入孔)。两组插头接收器左右排列。
[0239]
图23是例示实施方式的床装置的一部分的示意图。
[0240]
图23例示背部底板70a、膝关节底板70b、脚部底板70c及腰部底板70e。背部底板70a、膝关节底板70b及脚部底板70c各自的角度可以变更。底板间的角度被控制成不小于等于规定值(例如90度)。例如,连结背部底板70a的下端及膝关节底板70b的上端的线(图23中的虚线)和背部底板70a之间的角度被控制为规定值(例如90度)以下。例如,通过多个底板中的任一个的移动控制(联动),角度成为规定值以下。
[0241]
背部底板70a的动作角度例如为0度~70度。膝关节底板70b的动作角度为0度以上且25度以下。“高度”的动作范围例如为43cm。床高也可以根据床架而不同。床高的范围例如为30cm~73cm、32.5cm~75.5cm或35cm~78cm。
[0242]
底板倾斜的动作角度为-15度~15度。例如,为了避免床架内的干扰,在调节高度之后,进行倾斜动作,直到高度为“最低床高 3cm”。
[0243]
向心脏位置及底板平坦的动作伴随倾斜动作。在这些动作中,应用考虑到用户的滑落的动作顺序。
[0244]
在电动cpr动作中,按以下顺序进行动作。这时,如果能同时动作,则也可以同时动作。在电动cpr动作中,首先,使背部底板70a用的致动器470c(“背部act”)的冲程动作到下限。按下电动cpr动作用的按钮之后,在30秒以内到达致动器470c的下限。之后,进行倾斜动作,倾斜角度变为0度。之后,进行高度调节,高度变为最低床高。最低床高例如是“暂时停止高度”。之后,使膝关节底板70b动作而变为0度。
[0245]
在床装置310中,通过床操作装置380的操作,可以将与各种动作有关的按钮操作设为“禁止操作”状态。
[0246]
图24的(a)及图24的(b)是例示实施方式的床装置的一部分的示意图。
[0247]
这些图例示床操作装置380的显示输入部380d。图24的(a)例示显示输入部380d为床操作画面381的情况。图24的(b)例示显示输入部380d为致动器个别操作禁止画面383(床设定画面)的情况。
[0248]
如图24的(a)所示,例如,设置有按钮382a~382f等。这些按钮例如是触摸式输入装置中的输入接受区域。通过触摸这些按钮进行床操作。通过按钮382a进行心脏动作。通过按钮382b进行倾斜动作。通过按钮382c进行联动动作(“连锁动作”)。通过按钮382d,进行背部动作(背部角度的变更)。通过按钮382e,进行膝关节动作(膝关节角度的变更)。通过按钮382f,进行高度动作(高度的变更)。例如,若抬高床310b的背部,则按下按钮382d,之后当按下上升按钮380a时,床310b移动。床310b在按下上升按钮380a的期间移动。例如,若降低床的高度时,按下按钮382f,之后当按下下降按钮380b时,床310b的高度在按下下降按钮380b的期间降低。
[0249]
如图24的(b)所示,显示输入部380d可以转换为致动器个别操作禁止画面383(床设定画面)。通过显示输入区域383a的操作,可以单独禁止操作背部动作、膝关节动作、高度动作及倾斜动作中的每个动作。通过显示输入区域383b的操作,可以禁止所有操作,或者可以解除禁止操作。通过显示输入区域383c的操作,可以禁止手动开关483的操作,或者可以解除禁止操作。
[0250]
例如,当背部动作是禁止操作时,禁止心脏动作、联动动作及背部动作。例如,当膝关节动作是禁止操作时,禁止心脏动作、联动动作及膝关节动作。例如,当高度动作是禁止操作时,禁止心脏动作、倾斜动作及高度动作。例如,当倾斜动作是禁止操作时,禁止心脏动作及倾斜动作。
[0251]
在一个例子中,可以“禁止所有操作”。在另一个例子中,致动器470(470a~470d(参照图18)等)也可以选择性(个别)地设为“禁止操作”。致动器470“禁止操作”的解除由床操作装置380来解除。
[0252]
在床操作装置380从床310b卸下的情况下、或者床操作装置380连接的线缆断线的
情况下等,不能解除致动器470的选择性“禁止操作”。这时,通过“禁止所有操作”的解除,可以解除致动器470的“禁止操作”。
[0253]
独立地管理致动器470的禁止操作和手动开关483的禁止操作或“禁止所有操作”。例如,在致动器470是禁止个别操作的情况下,设为“禁止所有操作”,之后,即使解除“禁止所有操作”,也保留致动器470的禁止个别操作。
[0254]
当按压被禁止的按钮时,发出蜂鸣声,膜片开关的禁止led(例如,显示323t及343t等)闪烁。如果未发出蜂鸣声,不了解是按钮被禁止还是坏了。通过发出蜂鸣声来了解按钮被禁止。
[0255]
当按下手动开关483中被设为禁止的按钮时,手动开关483响铃。当按下膜片开关中被设为禁止的按钮时,例如,接线盒420响铃。
[0256]
通过医护人员用膜片开关或床操作装置380的操作,患者用膜片开关及手动开关483可以处于禁止操作状态。如果连接了医护人员用膜片开关或床操作装置380,则可以解除禁止操作。
[0257]
通过医护人员用膜片开关或床操作装置380的操作,可以禁止所有操作(“禁止所有操作”)。关于该禁止操作,只要连接了医护人员用膜片开关或床上导航中的任一个,就可以解除。
[0258]
例如,在床操作装置380未与床310b连接的情况、或者局部故障(通信不成立)等的情况下,“禁止所有操作”被解除。在该情况下,例如,可以通过手动开关483进行操作。在不使用户操作的情况下,也可以将手动开关483卸下。当按下被设为禁止的按钮时,发出蜂鸣声,膜片开关的禁止led闪烁。
[0259]
在手动开关483为禁止操作状态时,若按下“禁止所有操作”按钮,则“禁止所有操作”。之后,若按下“禁止所有操作”,则手动开关483的禁止操作及禁止所有操作被解除。在“禁止所有操作”时也进行cpr动作。无论在“禁止操作”、“手动开关禁止操作”及“禁止所有操作”中的哪个情况下,都进行cpr动作。
[0260]
例如,在“当前设定”中,在手动开关483不是禁止操作且也不是“禁止所有操作”的情况下,若按下手动开关483的禁止操作的按钮时,则手动开关483变为禁止操作,“所有操作”不是禁止操作(解除状态)。
[0261]
例如,在“当前设定”中,在手动开关483不是禁止操作且也不是“禁止所有操作”的情况下,若按下“禁止所有操作”按钮,则手动开关483及所有操作变为禁止。
[0262]
例如,在“当前设定”中,在手动开关483是禁止操作且不是“禁止所有操作”的情况下,若按下手动开关483的禁止操作的按钮,则手动开关483不是禁止操作(解除状态),“所有操作”不是禁止操作(解除状态)。
[0263]
例如,在“当前的设定”中,在手动开关483是禁止操作且不是“禁止所有操作”的情况下,若按下“禁止所有操作”按钮,则手动开关483及所有操作被禁止。
[0264]
例如,在“当前的设定”中,在手动开关483是禁止操作且是“禁止所有操作”的情况下,若按下手动开关483的禁止操作的按钮,则手动开关483及所有操作变为禁止。
[0265]
例如,在“当前的设定”中,在手动开关483是禁止操作且是“禁止所有操作”的情况下,若按下“禁止所有操作”按钮,则不再禁止操作手动开关483(解除状态),也不再禁止所有操作(解除状态)。
[0266]
通过图24的(b)中例示的显示输入区域383d的操作,可以变更动作速度。例如,各种动作的速度可以在多个阶段(例如两个阶段等)变更。
[0267]
也可以保存与床装置310的各种动作有关的历史记录。例如,历史记录被保存在控制箱410等的存储器中。保存有历史记录的存储器也可以设置于接线盒420或手动开关483等中。保存有历史记录的存储器也可以设置于床操作装置380中。与历史记录有关的信息不能通过电源的打开/关闭来重置。与历史记录有关的信息例如包括控制箱410的工作历史记录、致动器470的工作历史记录、手动开关483的工作历史记录、操作内容历史记录、故障历史记录及离床/在床历史记录。
[0268]
实施方式例如包括以下结构。
[0269]
(结构1)
[0270]
一种控制装置,其具备控制部,所述控制部基于床装置的第一致动器的轴的伸缩的第一变化量,控制所述第一致动器的所述轴的所述伸缩的速度。
[0271]
(结构2)
[0272]
根据结构1所述的控制装置,其中,所述第一致动器能够使第一可动部移动,通过所述第一致动器的所述轴的所述伸缩的变化而移动的所述第一可动部的第二变化量是规定的。
[0273]
(结构3)
[0274]
根据结构2所述的控制装置,其中,所述床装置还包括第一连接部,所述第一连接部与所述第一可动部及所述第一致动器连接,所述第一连接部使所述第一可动部产生与所述第一致动器的所述轴的所述伸缩的所述变化对应的移动。
[0275]
(结构4)
[0276]
一种控制装置,其具备控制部,所述控制部基于包括第一可动部和使所述第一可动部移动的第一致动器的床装置的与所述第一致动器的移动的第一变化量和所述第一可动部的移动的第二变化量的关系有关的第一关系信息来控制所述第一致动器。
[0277]
(结构5)
[0278]
根据结构4所述的控制装置,其中,所述控制部控制所述第一致动器,以使除所述第一可动部的移动开始及移动结束以外的期间中的所述第一可动部的所述移动的第一速度实质上恒定。
[0279]
(结构6)
[0280]
根据结构4或5所述的控制装置,其中,还具备获取所述第一关系信息的获取部,所述控制部基于所述获取部获取的所述第一关系信息来控制所述第一致动器。
[0281]
(结构7)
[0282]
根据结构4~6中任一项所述的控制装置,其中,还具备存储所述第一关系信息的存储部。
[0283]
(结构8)
[0284]
根据结构4~7中任一项所述的控制装置,其中,所述床装置还包括第一连接部,所述第一连接部与所述第一可动部及所述第一致动器连接,所述第一连接部使所述第一可动部产生与所述第一致动器的所述移动对应的所述移动。
[0285]
(结构9)
[0286]
根据结构4~8中任一项所述的控制装置,其中,所述第一致动器伸缩或旋转,所述控制部基于与所述第一致动器的所述伸缩或所述旋转的状态有关的第一状态信息和所述第一关系信息控制所述第一致动器。
[0287]
(结构10)
[0288]
根据结构4~9中任一项所述的控制装置,其中,所述床装置还包括第二可动部及第二致动器,所述第二致动器能够使所述第二可动部移动,所述控制部控制所述第二致动器。
[0289]
(结构11)
[0290]
根据结构10所述的控制装置,其中,所述控制部基于与所述第二致动器的所述移动的第三变化量和所述第二可动部的移动的第四变化量的关系有关的第二关系信息控制所述第二致动器。
[0291]
(结构12)
[0292]
根据结构10或11所述的控制装置,其中,所述控制部控制所述第二致动器,以使除所述第二可动部的移动开始及移动结束以外的期间中的所述第二可动部的所述移动的第二速度实质上恒定。
[0293]
(结构13)
[0294]
根据结构10~12中任一项所述的控制装置,其中,所述第二致动器伸缩或旋转,所述控制部基于与所述第二致动器的所述伸缩或所述旋转的状态有关的第二状态信息和所述第二关系信息,控制所述第二致动器。
[0295]
(结构14)
[0296]
根据结构12所述的控制装置,其中,所述控制部控制所述第一致动器的所述移动,以使除所述第一可动部的移动开始及移动结束以外的期间中的所述第一可动部的所述移动的第一速度实质上恒定,所述第一速度与所述第二速度实质上相同。
[0297]
(结构15)
[0298]
根据结构10~14中任一项所述的控制装置,其中,所述床装置还包括第二连接部,所述第二连接部与所述第二可动部及所述第二致动器连接,所述第二连接部使所述第二可动部产生与所述第二致动器的移动对应的移动。
[0299]
(结构16)
[0300]
一种床装置,其中,具备:结构2~15中任一项所述的控制装置;所述第一可动部;以及所述第一致动器。
[0301]
根据实施方式,可以提供能够更适当地控制可动部的移动的控制装置及床装置。
[0302]
以上,参照具体例对本发明的实施方式进行了说明。但是,本发明不限于这些具体例。例如,关于床装置所包括的控制装置、控制部、获取部、存储部、可动部、致动器及检测部等各要素的具体结构,只要本领域技术人员通过从公知的范围适当地选择,能够同样地实施本发明,获得同样的效果,就包括在本发明的范围内。
[0303]
另外,在技术上可能的范围内将各具体例中的任意两个以上的要素组合,只要包含本发明的主旨,就也包含在本发明的范围内。
[0304]
此外,本领域技术人员基于以上作为本发明的实施方式进行了说明的床装置,适当地变更设计并实施而获得的所有床装置只要包含本发明的主旨,就也属于本发明的范
围。
[0305]
除此之外,在本发明的思想范畴中,本领域技术人员可以想到各种变形例及修正例,并且应当理解,这些变形例及修正例也属于本发明的范围。
[0306]
附图标记说明
[0307]
40:控制部;40a:控制电路;40i:获取部;40m:存储部;70:床;70b:床架;70m:可动部;70a:背部底板;70b:膝关节底板;70c:脚部底板;70e:腰部底板;71、72:第一、第二致动器;71m、72m:第一、第二可动部;71r、72r:第一、第二连接部;71s、72s:第一、第二检测部;71d、72d:差;73a:背部用致动器;73as:背部用检测部;73b:膝关节用致动器;73bs:膝关节用检测部;75b:基架;75c:脚轮;78a:床头板;78b:床尾板;78c、78d:侧边护栏;78m:床垫;90:控制装置;δh1、δh2:变化量;110:床装置;aa:箭头;h1、h2:第一、第二高度;r、r1、r2:状态;s1~s4:第一~第四控制信号;sa、sm:速度;p1~p3:期间;t1~t4:第一~第四时刻;tm:时间;310:床装置;310b:床;320:头右侧侧边护栏;320f:外侧面;320g:内侧面;323:开关部;323a~323q:开关;323r~323t:显示;324:角度计;324a:显示部;325a:凸部;325b:凹部;325c:头侧凸部;325d:头侧凹部;325e:贯通孔;325f:下部贯通孔;325g:扶手;325h:贯通孔;327:开关部;327a~327d:开关;327n:开关;327u:usb端子;328:凹部;328h:孔;330:脚右侧侧边护栏;330f:外侧面;330g:内侧面;334:角度计;334a:显示部;335f:下部贯通孔;335g:扶手;335h:贯通孔;340:头左侧侧边护栏;340f:外侧面;340g:内侧面;343:开关部;343a~343q:开关;343r~343t:显示;344:角度计;344a:显示部;345e:贯通孔;347:开关部;347a~347d:开关;347n:开关;347u:端子;350:脚左侧侧边护栏;350f:外侧面;350g:内侧面;354:角度计;354a:显示部;355g:扶手;360:床头板;370:床尾板;370f:外侧面;370g:内侧面;375e:贯通孔;380:床操作装置;380d:显示输入部;380a:上升按钮;380b:下降按钮;380c:cpr按钮;380h:主页按钮;381:床操作画面;382a~382f:按钮;383:致动器个别操作禁止画面;383a~383d:显示输入区域;390b:基架;390c:脚轮;390f:框架;390m:床垫;398:照料者等;410:控制箱;410p:插头;420:接线盒;430:膜片开关;430a、430b:医护人员用膜片开关;430c、430d:患者用膜片开关;431a、431b:中继单元;440:脚底灯;450:侧边护栏传感器;455:脚轮锁传感器;457a、457b:护士呼叫协作;458:护士呼叫中继单元;460:称重单元;465:负载传感器;470:致动器;470a~470d:致动器;475:电池;481:睡眠传感器;482:充气床垫控制单元;483:手动开关;483d:显示部;483a~483d:开关对;483e:线缆;485:辅助插座;485p:插头;488:充电器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。