一种实体
‑
壳耦合结构拓扑优化方法
技术领域
1.本发明属于结构优化技术领域,具体涉及一种实体
‑
壳耦合结构拓扑优化方法。
背景技术:
2.目前的结构拓扑优化算法大多只能对同一维度的结构进行拓扑优化,很少有研究可实现多维度结构的协同拓扑优化,此外未见相关研究可实现实体和壳体结构在优化过程中和优化后的自然连接。连续体结构拓扑优化领域常用的结构拓扑优化方法有密度法、渐进结构优化方法、水平集方法与本专利采用的参数化水平集方法。
3.密度法:以单元或者节点的密度值作为设计变量,无法在结构优化过程中实现结构边界的显示表达,同时在得到优化结构后,需要将密度场后处理(例如对设计域内的密度进行等高线切割),才能显示地生成结构的边界。
4.渐进结构优化方法:只能对单元进行删除和恢复,无法形成的面片,与密度法相同,必须经过后处理才能显示地生成结构的边界。
5.水平集方法:可以显示清晰的边界,但是在三维度实体空间和二维壳空间连接处处理梯度的计算十分复杂,且无法自然地在三维度实体空间和二维壳空间实现孔洞的融合,无法自然地连接实体和壳体结构。
6.对于密度法和渐进结构优化方法,这两类方法可能可以应用于实体
‑
壳耦合结构的优化。但是未见相关文献和专利。此外,即使可采用密度法和渐进结构优化方法对实体
‑
壳耦合结构进行优化,也需要采用其他算法对优化结果后处理,例如对优化结果的密度场进行等高线切割,以获得显示的结构边界。然而,后处理过程也可能出现实体和壳连接错位的情况。
技术实现要素:
7.本发明的主要目的在于克服现有技术的缺点与不足,提出一种实体
‑
壳耦合结构拓扑优化方法,对实体和壳体耦合结构进行优化,实体部分采用实体单元离散,壳体部分采用壳单元离散;然后采用参数化水平集方法对实体
‑
壳耦合结构进行拓扑优化,解决在三维实体模型和二维平面模型协同优化的特点,并且能实现在优化过程中有清晰的边界、实体结构和壳结构自然的连接。
8.为了达到上述目的,本发明采用以下技术方案:
9.一种实体
‑
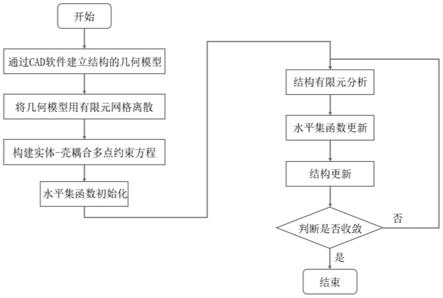
壳耦合结构拓扑优化方法,包括以下步骤:
10.s1、通过cad软件对所需要分析的实体
‑
壳耦合结构进行三维几何建模,得到实体和壳体的几何模型;
11.s2、建立实体和壳体的有限元模型,将所建立的实体和壳体几何模型导入到有限元软件中,进行前处理;
12.s3、构建实体
‑
壳节点多点约束方程;
13.s4、水平集函数初始化,得到设计区域内的初始结构,利用参数化水平集方法进行
实体
‑
壳耦合结构进行优化迭代;
14.s5、结构有限元分析,对得到的初始结构或迭代循环上一轮输出的结构进行有限元分析,得到有限元节点的位移分布,计算有限元节点应变能密度,计算水平函数结点灵敏度;
15.s6、水平集函数的更新;
16.s7、结构更新,在得到新的设计区域内水平集函数值后,利用显式切分算法对设计区域内进行显示切分得到更新的结构;
17.s8、判断收敛,计算结构柔顺度与对应的结构整体的体积分数,结构柔顺度即所有单元应变能之和,将计算结果与预设结构总的体积分数和结构柔顺度进行比较,若体积分数的差距和结构柔顺度的差距在预设的范围内,则方法结束;否则跳转到步骤s5并继续执行后续步骤。
18.进一步的,几何建模时,壳特征面的边缘处与实体结构相接触或分开建立实体和壳体结构,然后定义在实体结构上和壳体特征面接触处的共有实线。
19.进一步的,前处理具体包括以下步骤:
20.给定结构的支撑条件和所受外荷载;
21.采用有限元网格对几何模型进行离散,实体结构采用实体单元离散,壳结构采用壳单元离散,在实体和壳体特征面接触处的共有实线处,实体有限元节点和壳体有限元节点重合;
22.输出实体有限元网格编号、实体有限元节点坐标、壳体有限元网格编号以及壳体有限元节点坐标。
23.进一步的,步骤s3具体为:
24.通过在实体
‑
壳耦合接触面处重合的实体有限元节点和壳体有限元节点进行壳体节点自由度的耦合,建立平动自由度和转动自由度的约束方程;
25.平动自由度的约束,假设实体节点i与客体节点j在实体
‑
壳接触面上重合则有平动自由度关系如下:
[0026][0027]
转动自由度的约束,壳节点有6个转动自由度,采用对面内壳节点的转动自由度进行耦合,通过与该壳节点最近的两个实体节点的相对平动位移进行耦合。
[0028]
进一步的,水平集函数初始化具体为:
[0029]
根据有限元节点的坐标,建立水平集函数的节点集,即所有的水平集函数结点与有限元节点重合;
[0030]
给定水平集函数的上下界限,并给水平集函数结点赋予相应的水平集函数值,水平集函数值取上下界内的任意数值;
[0031]
利用水平集函数值,通过显式切分算法计算得到设计区域内的初始结构;水平集函数隐式表达结构的方式使实体和壳体之间自然地连接。
[0032]
进一步的,步骤s5具体为:
[0033]
通过有限元节点的位移向量与单元刚度矩阵计算出每个有限单元的应变能大小,计算公式为:
[0034][0035]
其中,d为单元节点位移列向量,k为单元位移矩阵,ρ为单元体积分数,e0为实体材料杨氏模量,e
min
为弱材料杨氏模量;
[0036]
与该有限元节点相连的总的单元应变能之和除以与该有限元节点相连的总的单元材料体积之和得到该有限元节点的单元应变能密度;
[0037]
有限元节点与水平集函数结点重合,该有限元节点对应的水平集函数的灵敏度为有限元节点的应变能密度。
[0038]
进一步的,步骤s6具体为:
[0039]
利用水平集函数的灵敏度进行水平集函数的更新;
[0040]
通过二分法计算得到约束材料体积用量的拉格朗日乘子,通过叠加拉格朗日乘子,计算得到修改后的水平集函数结点处的灵敏度,在设计区域内通过叠加步骤s4迭代循环后输出的水平集函数值或初始的水平集函数值得到新的水平集函数值,也即水平集函数的更新。
[0041]
进一步的,体积分数计算方法为结构总的实体材料所占体积v除以结构总的几何体积v
geo
;计算公式如下:
[0042][0043]
结构总的柔顺度为所有的单元应变能之和:
[0044]
m=∑m
[0045]
其中,m为结构总的柔顺度。
[0046]
本发明与现有技术相比,具有如下优点和有益效果:
[0047]
1、本发明采用的参数化水平集方法进行结构优化,无需在设计域中初始地放置均匀分布的孔洞;本发明方法可以自然地在设计域内生成孔洞并且融合孔洞,即三维实体空间内孔洞自然地产生和融合与三维曲面空间内孔洞自然地产生和融合。
[0048]
2、本发明首次实现了实体
‑
壳耦合结构的拓扑优化,采用参数化平集方法实现了三维实体空间和三维曲面空间的孔洞之间自然地相互融合。
[0049]
3、本发明可保持在优化过程中和优化后实体和壳体自然地连接,无需后处理(如密度法和渐进结构优化法);采用的参数化水平集方法继承了水平集方法边界清晰的特点;在优化过程中,使用本方法对结构进行拓扑优化可以实现结构边界清晰的表达,此外,通过实体结构和壳体结构连接处共有实线处有限元节点重合与水平集函数结点和有限元节点重合可以实现在实体和壳体连接部分自然地过渡。
附图说明
[0050]
图1是本发明方法的流程图;
[0051]
图2是二维悬臂连优化模型;
[0052]
图3是二维悬臂连优化结果;
[0053]
图4是三维航空发动机支架优化模型;
[0054]
图5是三维航空发动机支架优化结果;
[0055]
图6是实体壳耦合悬臂梁几何模型图;
[0056]
图7是实体壳耦合悬臂梁有限元模型图;
[0057]
图8是实体和壳悬臂梁有限元连接细节示意图;
[0058]
图9是实体有限元节点和壳体有限元节点耦合模型图;
[0059]
图10是水平集函数对实体和壳体单元同时切割示意图;
[0060]
图11是实体和壳优化开始结构图;
[0061]
图12是实体和壳优化迭代4步后结构图;
[0062]
图13是实体和壳优化若干步后结构图;
[0063]
图14是实体和壳优化最终收敛结构图。
具体实施方式
[0064]
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
[0065]
实施例
[0066]
传统的结构拓扑优化算法多是基于一种有限元单元,如图2所示,为基于一种平面单元的二维悬臂梁(长80,宽40)优化的模型图,该模型左端固支,右端受向下的集中力;如图3所示,为该悬臂梁经过拓扑优化,在体积减少50%时对应的优化结果。此外,如图4所示,为基于一种三维实体单元的航空发动机支架优化模型图,该支架下端凹槽处固定支撑,上方受集中力;如图5所示,给出了该航空发动机支架经过拓扑优化,在体积分数减少80%时对应的优化结果。本发明所提出的技术对实体和壳体耦合结构进行优化,其中实体部分采用实体单元离散;和壳体部分采用壳单元离散。然后采用参数化水平集方法对实体
‑
壳耦合结构进行拓扑优化。该技术解决在三维实体模型和二维平面模型协同优化的特点,并且能实现在优化过程中有清晰的边界、实体结构和壳结构自然的连接。该技术属于计算机技术中结构分析与优化方法。
[0067]
如图1所示,本发明,一种实体
‑
壳耦合结构拓扑优化方法,包括以下步骤:
[0068]
s1、通过cad软件(包括但是不限于犀牛,autocad等),本实施例中采用autocad,对所需要分析的实体
‑
壳耦合结构进行三维几何建模;
[0069]
在本实施例中,在autocad中对一个长度为80宽度为40厚度为2的悬臂梁进行建模,在该模型中,左半部分由三维实体单元表示,右半部分由壳单元表示,该模型在autocad的几何结构如图6所示。
[0070]
s2、建立实体和壳体的有限元模型,具体为:
[0071]
将建立的几何模型导入到有限元软件(包括但是不限于abaqus,ansys等)中,本实施例采用abaqus;并设定该结构左端固支,右端中点设置集中力;
[0072]
实体结构采用实体单元(三维)离散,壳结构采用壳单元(二维)离散,在实体和壳体特征面接触处的共有实线处,实体有限元节点和壳有限元节点重合;如图7所示,为实体结构和壳体结构分别被线性四面体单元和三角形壳单元离散的有限元网格示意图;如图8所示,为该实体壳耦合结构连接面处的细节图;从图中可以发现,在壳和实体结构共有的实线处壳有限元节点和实体有限元节点重合。此外,在算例中,可以采用重合节点上下两排处实体节点来耦合重合节点处的转动自由度。
[0073]
s3、构建实体
‑
壳节点多点约束方程,具体为:
[0074]
在本实施例中,该实体节点和壳体节点的具体耦合方式也可用图9来阐述。如图9所示,图9中左侧结构为实体结构,右侧结构为壳结构,壳结构的厚度为h,壳结构特征面在h/2处。实体结构在连接面上的节点有1、2、3号,壳体结构在连接面上对应的节点编号有k。k号节点和2号节点完全重合,且位于实体和壳体特征面接触处的共有实线上。在有限元方程中,约束2号节点和k号节点的平动自由度相同,k号节点的转动自由度通过1、3号节点相对于2号节点的平动自由度约束。
[0075]
其中约束可以分为平动自由度的约束和转动自由度的约束;
[0076]
平动自由度的约束,假设实体节点i与客体节点j在实体
‑
壳接触面上重合则有平动自由度关系如下:
[0077][0078]
以图9为例,则有约束方程:
[0079][0080]
转动自由度的约束,壳节点有6个转动自由度,采用对面内壳节点的转动自由度进行耦合,通过与该壳节点最近的两个实体节点的相对平动位移进行耦合,耦合关系以图9为例如下,3号节点为在实体表面距离2号节点(k号节点)最近的点。该模型耦合面上的局部坐标系和整体坐标系相同,壳节点k自由度θ
xk
,θ
yk
与实体节点可耦合为:
[0081][0082]
其中,h为壳厚度,1,3号节点分布在实
‑
壳耦合表面距壳中面处。此外,壳节点k自由度与1号实体节点也可耦合为:
[0083][0084]
s4、水平集函数初始化,具体为:
[0085]
在本实施例中,首先建立水平集函数结点,并保持与有限元分析节点一致。然后,本算例给定水平集函数的上下界分别为
‑
10和10。同时使得所有水平集函数结点处的水平集函数值均为1。因为所有水平集函数节点处的值均1,通过显式切分算法计算(例如marchingcubes,marchingtetrahedrons等算法)材料边界,容易知道初始结构为设计区域中满布材料。本实施例中采用了实体有限元节点和壳体有限元节点在实壳连接处重合,且水平集函数结点和有限元函数节点重合,并结合显示切分算法可以实现实体和壳在优化过程中和优化后自然地连接。如图10所示,为该过程的一个示意图。在图10中,左下方为4面体实体有限单元,右上方三角形壳有限单元,两者通过共有有限元节点相连。由于水平集函数结点和有限元节点完全重合,因此在该结构中水平集函数结点有的a,b,c,d,e,f;其中a,b,c为实体区域的水平集函数结点,e,f为实体区域的水平集函数结点,d为实体区域和壳体区域的共有水平集函数结点。其中,a,b,c,e,f水平集函数结点的数值为
‑
1,d结点节点处的水平集函数结点为1。对左侧四面体实体单元采用marchingtetrahedrons算法显示计算实体区域为4四面体单元内部灰色区域,对三角形壳单元采用显示切分算法计算的实体材料区域为三角形壳单元内部的灰色区域,通过共有水平集函数结点实现了实体和壳体自然地连接。
[0086]
s5、结构有限元分析,具体为:
[0087]
对初始结构或者上一步循环后输出的结构进行有限元分析。在本实体
‑
壳耦合算例中,实体结构采用4节点线性四面体有限单元,壳结构采用三角形平板壳单元。平板壳单元由dkt板单元和三角形膜单元组成。组装实体结构和壳结构的刚度矩阵后,在总的刚度矩阵中引入多点约束方程,从而形成新的刚度矩阵。然后,利用外荷载和结构刚度矩阵求解出有限元的节点位移;
[0088]
利用有限元节点的位移向量与单元刚度矩阵计算出每个有限单元的应变能大小,计算公式为:
[0089][0090]
其中,d为单元节点位移列向量,k为单元位移矩阵,ρ为单元体积分数,e0为实体材料杨氏模量,e
min
为弱材料杨氏模量;
[0091]
利用与该有限元节点相连的总的单元应变能之和除以与该有限元节点相连的总的单元材料体积之和得到该有限元节点的单元应变能密度;
[0092]
有限元节点与水平集函数结点重合,该有限元节点对应的水平集函数的灵敏度为有限元节点的应变能密度。
[0093]
s6、水平集函数的更新,具体为:
[0094]
通过二分法计算得到约束材料体积用量的拉格朗日乘子,其次通过叠加拉格朗日乘子,计算得到修改后的水平集函数结点处的灵敏度,在设计区域内叠加步骤s4迭代循环后输出的水平集函数值或初始的水平集函数值得到新的水平集函数值,从而进行水平集函数的更新。
[0095]
s7、结构更新,具体为:
[0096]
在得到新的设计区域内水平集函数值后,利用显式切分算法对设计域内进行显示切分得到更新的结构。如图11所示,为初始结构为材料满布在设计域中的示意图。如图12所示,为优化迭代进行4步后的结构示意图。可以发现,本实施例使用的参数化水平集方法可以在设计区域中自然的生成孔洞,无需在初始结构中引入均匀分布的孔洞。如图13所示,为优化迭代进行若干步后结构的示意图,可以发现实体和壳体可自然地连接。此外,采用显示切分算法可以使得结构在优化过程中有清晰的边界。
[0097]
s8、判断收敛,具体为:
[0098]
计算结构总的柔顺度,即所有单元应变能之和:
[0099]
m=∑m
[0100]
其中,m为结构总的柔顺度;
[0101]
计算对应的结构整体的体积分数,即结构总的实体材料所占体积v除以结构总的几何体积v
geo
,计算公式如下:
[0102][0103]
本实施例中该优化算例的体积分数为50%;
[0104]
程序停止条件被设置为到达最大迭代步数200,或者满足当前步下所计算的体积分数与目标体积分数的差距在0.1%内且当前步下所计算的目标函数与前九步的目标函数的差距在0.1%内(收敛);
[0105]
如图14所示,为优化迭代最终收敛后结构的示意图,实体结构和壳体结构直接形成了自然地过渡与连接。
[0106]
还需要说明的是,在本说明书中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0107]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其他实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。