1.本实用新型一般涉及垃圾收集装置技术领域,具体涉及一种半自主式水面垃圾机械化清理装置。
背景技术:
2.环境是人类生存和活动的场所,也是向人类提供生产和消费所需要自然资源的供应基地。随着科技的飞速发展,环境问题日益突出,其中尤其引人注目的就是水环境的污染问题了,河流、湖泊、公园以及水上乐园里漂浮的垃圾所造成的污染已经逐步影响到了人们的正常生活。
3.在陆地上垃圾清理的工作是比较容易开展的,但是在水中的垃圾才是让人头疼的对象,因为清洁人员需要考虑到清理时应搭乘的工具,以及收集垃圾的工具和存放垃圾的容器,这无疑增加了清洁人员的工作量,同时还浪费了时间,也不能完全保证清洁人员的人身安全。
技术实现要素:
4.鉴于上述的问题,本技术提供了一种半自主式水面垃圾机械化清理装置, 用以解决背景技术中提出的技术问题。
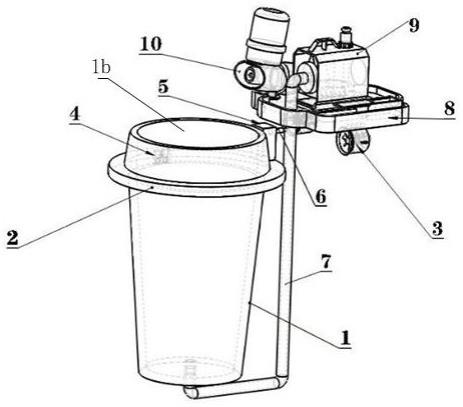
5.本实用新型提供一种半自主式水面垃圾机械化清理装置,包括漂浮本体及与所述漂浮本体相连接的垃圾收集桶,所述垃圾收集桶的顶部设置有开口,所述漂浮本体上设置有水泵、单片机及电源,所述漂浮本体的下方设置有螺旋桨推进器,所述垃圾收集桶的底部设置有出水口,所述水泵的进口与所述出水口相连通,所述电源与所述水泵、单片机、所述螺旋桨推进器供电连接,所述单片机与所述水泵、螺旋桨推进器控制连接。
6.进一步地,还包括设置在所述垃圾收集桶的超声波测距模块,所述超声波测距模块与所述单片机控制连接。
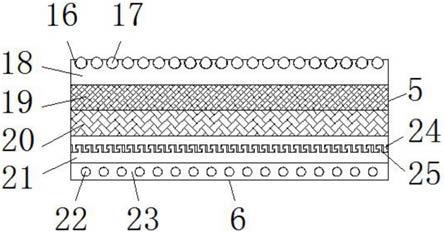
7.进一步地,所述垃圾收集桶的侧壁为中空设置,所述超声波测距模块设置在所述垃圾收集桶的侧壁上。
8.进一步地,所述单片机的型号为stm32f103c8t6。
9.进一步地,所述超声波测距模块的型号为hc
‑
sr04。
10.进一步地,所述螺旋桨推进器通过电机驱动模块与所述单片机连接,所述电机驱动模块的型号为l298n。
11.进一步地,还包括设置在所述漂浮本体上的声光报警模块,所述声光报警模块包括警示灯和蜂鸣器。
12.进一步地,所述垃圾收集桶上套设有平衡片。
13.进一步地,所述漂浮本体上设置有上部开口的电源防水盒,在所述电源防水盒的开口位置设置有防水盒盖,所述电源设置在所述电源防水盒内。
14.本实用新型提供了一种半自主式水面垃圾机械化清理装置,具有以下的有益效
果:
15.1、在使用时,只需将本装置放置在水中,控制螺旋桨推进器工作将本装置移动至有漂浮垃圾的地方,垃圾随水流进入垃圾收集桶,控制水泵工作将进入垃圾收集桶内的水抽出,实现对垃圾的收集,达到对水面垃圾清理的效果。
16.2、通过设置超声波测距模块和声光报警模块,可自动检测周围漂浮垃圾的距离及位置,从而便于对垃圾的清理,通过超声波测距模块还可以测量垃圾桶内垃圾的收集量,当垃圾收集至桶口处时发出声光信号,提醒清洁人员对桶内垃圾进行清理。
17.3、本实用新型运用的电机驱动模块搭载了l298n芯片,该芯片可以驱动电机并可以通过接收stm32单片机发出的指令,通过pwm波来进行控制电机转速,以实现本实用新型游走、改变方向以及速度切换的功能。
附图说明
18.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显。
19.图1为本实用新型提供的一种半自主式水面垃圾机械化清理装置的立体结构示意图。
20.图2为本实用新型提供的一种半自主式水面垃圾机械化清理装置的俯视结构示意图。
21.图3为本实用新型提供的一种半自主式水面垃圾机械化清理装置的侧视结构示意图。
具体实施方式
22.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关实用新型,而非对该实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与实用新型相关的部分。
23.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
24.本实用新型提供一种半自主式水面垃圾机械化清理装置,参考图1
‑
图3,作为一种具体的实施方式,该清理装置包括漂浮本体8及与所述漂浮本体8相连接的垃圾收集桶1,所述垃圾收集桶1的顶部设置有开口1b,所述漂浮本体8上设置有水泵8、单片机14及电源15,所述漂浮本体8的下方设置有螺旋桨推进器3,所述垃圾收集桶1的底部设置有出水口1a,所述水泵8的进口与所述出水口1a相连通,所述电源与所述水泵8、单片机14、所述螺旋桨推进器3供电连接,所述单片机14与所述水泵8、螺旋桨推进器3控制连接。
25.具体的,漂浮本体8具体可以为漂浮垫,该清理装置的工作原理为:在使用时,只需将本装置放置在水中,控制螺旋桨推进器工作将本装置移动至有漂浮垃圾的地方,垃圾随水流进入垃圾收集桶,控制水泵工作,通过输水管7将进入垃圾收集桶内的水抽出,实现对垃圾的收集,达到对水面垃圾清理的效果。
26.参考图1,在漂浮本体8的下表面设置有连接杆6,连接杆6上设置有连接卡扣5,垃圾收集桶1与漂浮本体通过连接卡扣5卡接连接。
27.进一步地,参考图1,作为优选的实施方式,该清理装置还包括设置在所述垃圾收集桶1的超声波测距模块4,所述超声波测距模块4与所述单片机14控制连接。
28.超声波测距模块4的工作原理为:采用io口trig触发测距,模块自动发送8个40khz的方波,自动检测是否有信号返回;若有信号返回,则通过io口echo输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测量距离=(高电平时间*声速(340m/s))/2,输出高电平时,开启定时器计时,当此口变为低电平时就可以读定时器的值,此时就是测距的时间,方可计算出距离。此模块性能稳定,测度距离准确,精度高,盲区小
29.进一步地,作为优选的实施方式,所述垃圾收集桶1的侧壁为中空设置,所述超声波测距模块4嵌设在设置在所述垃圾收集桶1的侧壁上。具体的,超声波测距模块4可以设置在垃圾收集桶中空的侧壁内部,也可以通过防水处理后嵌设在垃圾收集桶的侧壁外侧,通过线束与单片机相连接。
30.进一步地,参考图1,作为具体的实施方式,所述垃圾收集桶1上套设有平衡片2,通过设置平衡片可以调节清理装置的重心,使该清理装置在水中能够保持平衡。
31.进一步地,所述单片机14的型号为stm32f103c8t6。
32.进一步地,所述超声波测距模块4的型号为hc
‑
sr04。
33.进一步地,所述螺旋桨推进器3通过电机驱动模块13与所述单片机14连接,所述电机驱动模块13的型号为l298n。
34.进一步地,还包括设置在所述漂浮本体8上的声光报警模块10,所述声光报警模块10包括警示灯和蜂鸣器。
35.进一步地,所述漂浮本体8上设置有上部开口的电源防水盒11,在所述电源防水盒11的开口位置设置有防水盒盖12,所述电源15设置在所述电源防水盒11内。
36.具体的,本实用新型的上述方案中,单片机的型号为stm32f103c8t6,采用stm32单片机,功耗小,性能稳定,水泵为usb微型水泵,在通电后,整机初始化,各模块开始工作。当本机进入工作环境时,核心控制模块主要由stm32f103c8t6来进行主控,stm32f103c8t6会安装到特有的驱动板上作为主控芯片,驱动板上会接有接收遥控器指示的红外模块,当遥控器给出开机指令后,驱动板上的红外模块接收信号并且反馈给主控芯片,程序中会设有开机的标志位变量,当主控芯片接收到红外模块的反馈就会立刻使标志开机的变量发生变化,变量取值不同时将会给主控芯片接有用于移动的电机的管口给予不同的电平,从而使得遥控器直接控制装置的工作与不工作。通过遥控器可以控制机体的移动,操作方便,工作效率大大提高,到达某一位置启动电机驱动模块开始工作,经过超声波模块开始工作,装满垃圾后并发出声光报警,提醒清洁人员对内部垃圾进行清理。
37.所述单片机stm32控制器14与usb微型水泵9、声光报警模块10、超声波模块4、电机驱动模块13、螺旋桨推进器3和电源通过导线电性相连。
38.所述电机驱动模块13运用l298n芯片,采用标准逻辑电平信号控制,具有两个使能控制端,在不受输入信号的影响下允许或禁止器件工作,有一个逻辑电源输入端,使内部逻辑电路在低电平下工作,该芯片可以驱动一台两项步进电机或四项步进电机。作为具体的实施方式,本实用新型提供的清理装置中设置有两个螺旋桨推进器3。
39.所述声光报警模块10采用推挽式放大电路,即放大电压的同时也放大电流,结构简单,性能稳定在主控板损坏的时候通过按键依旧可以正常工作,本实用新型运用的声光
报警模块采用推挽式放大电路,即放大电压同时也放大电流,具有结构简单,性能稳定,两只对称的功率开关管每次只有一个导通,导通损耗小,两不同极性晶体管连接的输出电路,该模块使用12v有源高分贝蜂鸣器,耐压24v,可以直接使用12v电池供电,在主控板损坏时,通过按键依旧可以正常工作。大大提高了本实用新型的实用性,耐久性,适合水域复杂的工作环境。
40.进一步地,作为进一步地改进,不实用新型提供的清理装置还可以包括由光电开关模块,在没有遥控器控制的情况下,光电开关可以控制整机向任意方向运动,该模块是利用被检测物对光束的遮挡或反射,由同步回路接通电源,从而检测物体的有无,接收器再根据收到的光线的强弱或有无对目标物体进行探测,由此来实现自动巡航的功能。
41.本实用新型可以放到这些区域内来进行水面垃圾清理;操作起来也比较容易,一个人就可以完成一个水域垃圾的清理,这样完全就节省大量的人力物力;一个地方完成后,可以继续向下一个清洁区移动,就算是在公园和水上乐园这些公众场合中,也不会影响游客参观和游玩;同时还能进行垃圾清理,且本实用新型提供的水面垃圾清理装置能够适应各种水面环境,相较于其他的垃圾清理机器人,本装置的成本也会大大降低,同时也在一定程度上保证了清理人员的人身安全。
42.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的实用新型范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述实用新型构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。