1.本技术涉及一种电动汽车用变速系统,更详细地讲,涉及一种能够以行星齿轮方式控制的电动汽车用变速系统。
背景技术:
2.由于全球性的高油价及管制,提高燃油经济性及环保性成为了汽车开发的核心项目。因此,先进的汽车制造商将精力集中在用于提高燃料效率及环保性的技术开发。
3.其中,代表性的示例示电动汽车。以下,电动汽车表示利用电动马达驱动的汽车,可以被理解为诸如混合动力汽车、燃料电池汽车、蓄电池汽车等的蓄积电能并且据此来驱动马达向汽车传递驱动力的概念的车辆。
4.通常,利用这种马达的驱动方式配备有使马达的转速减速来使其与车辆的行驶速度匹配的减速器。减速器在连接至输入轴的输入轴侧齿轮与连接至车轮的输出轴之间还配备有齿轮,该齿轮形成有单独的减速比,从而使马达的输入轴的转速以减速的状态输出到输出轴。
5.即,现有的电动汽车用二级变速器采用齿轮系式的减速器,并且通过这种减速器,马达的驱动力产生为一级变速驱动力及二级变速驱动力。
6.另外,现有的电动汽车用二级变速器通过反向驱动马达来实现电动汽车的倒车。
7.然而,现有的电动汽车用二级变速器采用齿轮系式的减速器结构。
8.即,由于采用齿轮系式的减速器结构,现有的电动汽车用二级变速器的大小增加并且重量增加。
9.因此,会发生采用齿轮系式的减速器结构的电动汽车的燃料效率降低的问题。
10.除了降低燃料效率以外,由于采用了简单地增加一个齿轮系的齿轮系方式,这对现有的电动汽车用二级变速器的生产费用层面或者最优化性能设计方面成为障碍。
技术实现要素:
11.技术问题
12.为了解决上述的问题的本技术作为第一实施例,提出了一种如下的能够控制倒车的电动汽车用变速系统,即,通过采用行星齿轮方式的减速器来实现一级变速、二级变速或者倒车变速,从而可以在增加电动汽车的燃料效率的同时降低电动汽车的生产费用。
13.并且,本技术作为第二实施例,提出了一种如下的能够控制倒车的电动汽车用变速系统,即,通过采用行星齿轮方式的减速器来实现前进及倒车变速,从而可以在增加电动汽车的燃料效率的同时降低电动汽车的生产费用。
14.并且,本技术作为第三实施例,提出了一种能够将诸如重型车辆、货运车辆或公共汽车等的需要大输出的大型车辆和需要高速、车辆中心平衡及高旋转惯性的运动型车辆实现为电动汽车的垂直型的电动汽车用变速系统。
15.本技术需要解决的问题并不局限于以上提及的问题,未提及的其他问题可通过下
面的记载而明确理解未提及的其他问题。
16.技术方案
17.为了解决上述问题的根据本技术的一实施例的一种电动汽车用变速系统包括:动力源,提供动力;输入轴,设置为从所述动力源接收旋转力;环形齿轮托架,连接于所述输入轴并根据输入轴的旋转而旋转;环形齿轮,连接于所述环形齿轮托架并根据环形齿轮托架的旋转而旋转;行星齿轮,啮合设置于所述环形齿轮的内侧而旋转;行星齿轮托架,连接于所述行星齿轮并根据行星齿轮的旋转而旋转;输出轴,连接于所述行星齿轮托架并与行星齿轮托架一起旋转;太阳齿轮,啮合设置于所述行星齿轮的内侧而旋转,并按使所述输出轴能够旋转的方式与所述输出轴连接;一级变速部,与太阳齿轮结合而固定太阳齿轮的旋转,使接收动力源的一方向旋转力的输入轴沿一方向旋转,并据此旋转没有被固定的环形齿轮托架沿一方向旋转,并由此环形齿轮沿一方向旋转,并且根据环形齿轮的一方向旋转而使行星齿轮沿与一方向不同的另一方向自转而沿着所述旋转被固定的太阳齿轮沿一方向减速而公转,并且被减速的一方向的旋转力传递到旋转没有被固定的行星齿轮托架,输出轴沿被减速的一方向旋转,从而实现一级变速。
18.根据申请的一实施例的电动汽车用变速系统还可以包括:二级变速部,使环形齿轮托架和行星齿轮托架结合,使输入轴、环形齿轮托架、环形齿轮、行星齿轮、行星齿轮托架及输出轴成为一个主体来使传递到所述输入轴的动力源的一方向的旋转力以不被减速的状态传递到行星齿轮,行星齿轮啮合于旋转没有被固定的太阳齿轮而沿一方向旋转并且行星齿轮的一方向旋转力通过行星齿轮托架传递到输出轴,从而实现二级变速。
19.根据申请的一实施例的电动汽车用变速系统还可以包括:变速控制部,在一级变速时,控制一级变速部来使太阳齿轮和一级变速部结合而固定太阳齿轮的旋转,同时控制二级变速部使太阳齿轮托架和行星齿轮托架不结合,在二级变速时,控制二级变速部来使太阳齿轮托架和行星齿轮托架结合,使输入轴、环形齿轮托架、环形齿轮、行星齿轮、行星齿轮托架及输出轴成为一个主体,并且控制一级变速部来使太阳齿轮和一级变速部不结合。
20.并且,在倒车变速时,所述变速控制部控制一级变速部来使太阳齿轮和一级变速部结合的同时控制二级变速部使环形齿轮托架和行星齿轮托架不被结合的状态下控制动力源使动力源的另一方向的旋转力传递到输入轴,或者控制二级变速部使环形齿轮托架和行星齿轮托架结合来使输入轴、环形齿轮托架、环形齿轮、行星齿轮、行星齿轮托架及输出轴成为一个主体,并且控制一级变速部使太阳齿轮和一级变速部不结合的状态下控制动力源使动力源的另一方向的旋转力传递到输入轴。
21.并且,所述一级变速部可以包括:套筒引导件,固定连接于太阳齿轮;
22.固定套筒引导件,与所述套筒引导件隔开设置;一级变速套筒,在固定套筒引导件上滑动移动而结合于套筒引导件或者解除该结合;一级变速叉,可旋转地连接于一级变速套筒;一级变速叉致动器轴,按使一级变速叉能够进行直线移动的方式连接于一级变速叉;以及一级变速致动器马达,使一级变速叉致动器轴旋转。
23.并且,所述二级变速部可以包括:二级变速箱,固定于行星齿轮托架;二级变速套筒,在二级变速箱上滑动移动而结合于环形齿轮托架或者解除该结合;二级变速叉,可旋转地连接于二级变速套筒;二级变速叉致动器轴,按使二级变速叉能够进行直线移动的方式连接于二级变速叉;以及二级变速致动器马达,使二级变速叉致动器轴旋转。
24.为了解决上述课题的根据本技术的另一实施例的一种电动汽车用变速系统包括:动力源,提供动力;输入轴,设置为从所述动力源接收旋转力;太阳齿轮,轴连接于所述输入轴而旋转;行星齿轮,啮合设置于所述太阳齿轮的外侧;行星齿轮托架,按使所述行星齿轮在输入轴能够旋转的方式支撑所述行星齿轮;输出轴,连接于所述行星齿轮托架;环形齿轮,设置于所述行星齿轮托架的外侧并啮合于行星齿轮;环形齿轮托架,按使所述环形齿轮在输出轴能够旋转的方式支撑所述环形齿轮;旋转控制部,只允许所述环形齿轮的一方向旋转;前进变速部,固定结合于所述输入轴并与太阳齿轮一起旋转,结合于行星齿轮托架或者解除该结合来调节前进变速;倒车变速部,可旋转地结合于所述输出轴并结合于环形齿轮托架或者解除该结合来调节倒车变速;以及变速控制部,在一级变速时,控制所述前进变速部不结合于所述行星齿轮托架并且控制所述倒车变速部不结合于所述环形齿轮托架,在倒车变速时,控制所述前进变速部不结合于所述行星齿轮托架并且控制所述倒车变速部结合于所述环形齿轮托架。
25.并且,在二级变速时,所述变速控制部控制所述前进变速部结合于所述行星齿轮托架并且控制所述倒车变速部不结合于所述环形齿轮托架。
26.并且,所述一级变速时,所述旋转控制部以工作状态作用于欲沿与所述环形齿轮的一方向不同的另一方向旋转的环形齿轮,阻碍所述环形齿轮沿另一方向的旋转来固定所述环形齿轮的旋转。
27.所述二级变速时,所述旋转控制部以非工作状态作用于欲沿所述环形齿轮的一方向旋转的环形齿轮,允许所述环形齿轮的一方向的旋转。
28.在所述倒车变速时,在所述前进变速部和行星齿轮托架处于不结合状态并且所述倒车变速部和环形齿轮托架处于结合状态下,旋转控制部以非工作状态作用于欲沿所述一方向旋转的环形齿轮来允许环形齿轮的一方向旋转,然而由于所述倒车变速部和环形齿轮托架的结合而使环形齿轮的旋转被固定。
29.并且,在一级变速时,所述变速控制部控制所述旋转控制部针对欲沿与所述环形齿轮的一方向不同的另一方向旋转的环形齿轮阻碍所述环形齿轮沿另一方向的旋转来固定所述环形齿轮的旋转,在二级变速时,所述变速控制部控制所述旋转控制部允许欲向所述环形齿轮的一方向旋转的环形齿轮的旋转,在倒车变速时,所述变速控制部控制所述旋转控制部允许欲向所述环形齿轮的一方向旋转的环形齿轮的旋转,在所述倒车变速时,所述变速控制部尽管允许所述环形齿轮沿一方向的旋转,然而由于所述倒车变速部和环形齿轮托架的结合而使环形齿轮的旋转被固定。
30.另外,所述前进变速部可以包括:前进变速箱,固定连接于接收所述动力源的旋转力的所述输入轴;前进变速套筒,在所述前进变速箱进行滑动移动而结合于所述行星齿轮托架或者解除该结合;前进变速叉,可旋转地连接于所述前进变速套筒;前进变速叉致动器轴,连接于所述前进变速叉,按使所述前进变速叉能够进行直线移动的方式连接于所述前进变速叉;以及前进变速致动器马达,使所述前进变速叉致动器轴旋转。
31.所述倒车变速部可以包括:倒车变速箱,可旋转地连接于所述输出轴,所述输出轴固定连接于所述行星齿轮托架而旋转;倒车变速套筒,在所述倒车变速箱进行滑动移动而结合于所述环形齿轮托架或者解除该结合;倒车变速叉,可旋转地连接于所述倒车变速套筒;倒车变速叉致动器轴,按使所述倒车变速叉能够进行直线移动的方式连接于所述倒车
变速叉;以及倒车变速致动器马达,使所述倒车变速叉致动器轴旋转。
32.另外,所述旋转控制部可以是单向离合器。
33.技术效果
34.根据本技术的第一实施例的电动汽车用变速系统通过采用行星齿轮方式的减速器来实现前进及倒车变速,从而可以在增加电动汽车的燃料效率的同时降低电动汽车的生产费用。
35.根据本技术的第二实施例的电动汽车用变速系统通过采用行星齿轮方式的减速器来实现前进及倒车变速,从而可以在增加电动汽车的燃料效率的同时降低电动汽车的生产费用。
36.并且,根据本技术的第三实施例的纵向型的电动汽车用变速系统具有纵向型驱动力传递方式,可以用作前轮驱动(ff:front motor frontdrive)方式、后轮驱动(fr:front motor rear drive)方式、四轮驱动(four whell drive)方式等的电动汽车的动力传递系统。
37.本技术的效果并不局限于以上提及的效果,本领域技术人员可以通过下面的记载而明确理解未提及的其他效果。
附图说明
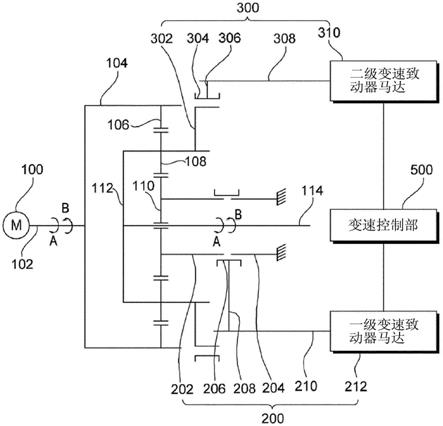
38.图1作为根据本技术的第一实施例的电动汽车用变速系统的构成而示出一级变速操作状态及通过一级变速的倒车变速操作状态的图。
39.图2示出根据本技术的第一实施例的电动汽车用变速系统的二级变速操作状态及通过二级变速操作的倒车变速操作状态的图。
40.图3作为根据本技术的第二实施例的能够进行倒车控制的电动汽车用变速系统的构成而示出一级变速操作状态的图。
41.图4是示出根据本技术的第二实施例的电动汽车用变速系统的二级变速操作状态的图。
42.图5是示出根据本技术的第二实施例的电动汽车用变速系统的倒车变速操作状态的图。
43.图6是示出根据本技术的第三实施例的电动汽车用变速系统的图。
44.附图标记说明:
45.10:变速器
46.50:二级驱动齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
52:二级从动齿轮
47.70:差动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
80、82:驱动轮
48.100:动力源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102:输入轴
49.104:齿圈架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
106:环形齿轮
50.108:行星齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110:太阳齿轮
51.112:行星齿轮托架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
114、114a、114b:输出轴
52.116:前进变速箱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
118:前进变速套筒
53.120:前进变速叉
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122:前进变速部
54.124:倒车变速箱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
126:倒车变速套筒
55.128:倒车变速叉
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130:倒车变速部
56.132:前进变速致动器马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
134:前进变速叉驱动轴
57.136:倒车变速叉驱动轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
138:倒车变速致动器马达
58.140:单向离合器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200:一级变速部
59.202:套筒引导件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
204:固定套筒引导件
60.206:一级变速套筒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
208:一级变速叉
61.210:一级变速叉驱动轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212:一级变速致动器马达
62.300:二级变速部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302:二级变速箱
63.304:二级变速套筒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
306:二级变速叉
64.308:二级变速叉驱动轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310:二级变速致动器马达
65.500:变速控制部
具体实施方式
66.参照与附图一起详细后述的一实施例,则可以明确本技术的优点和特征以及达成这些的方法。然而,本技术可以实现为互不相同的多种形态,并不限于以下公开的一实施例,只是提供本实施例使本技术的公开完整并用于向本技术所属技术领域中的普通技术人员完整地告知本技术的范围,本技术仅由权利要求书的范围所定义。
67.本说明书中使用的术语是用于说明实施例的,而不是限制本技术的。在本说明书中,单数型也包括复数型,除非在语句中特别提到。说明书中使用的“包含(comprises)”和/或“包括(comprising)”不排除除了所提及的构成要素之外的一个以上的其他构成要素的存在或添加。贯穿整个说明书,相同附图标记指代相同的构成要素,“和/或”包括所提及的构成要素中的每一个和一个以上的所有组合。虽然“第一”、“第二”等用于叙述多种构成要素,但这些构成要素显然不受限于这些术语。这些术语仅用于将一个构成要素与另一构成要素进行区分。因此,以下提及的第一构成要素在本技术的技术思想内,显然也可以是第二构成要素。
68.除非有其他定义,本说明书中所使用的所有术语(包括技术及科学术语) 可使用为本技术所属技术领域的一般技术人员共同理解的含义。此外,一般所使用的词典中定义的术语不能被理想地或过度地解释,除非有特别明确的定义。
69.以下,参照附图对本技术的实施例进行详细说明。首先参照图1及图2 对根据本技术的第一实施例的电动汽车用变速系统进行说明。
70.图1是示出根据本技术的第一实施例的电动汽车用变速系统的构成的图。
71.参照图1,根据本技术的第一实施例的电动汽车用变速系统包括:动力源100,提供动力;输入轴102,设置为从动力源100接收旋转力;环形齿轮托架104,连接于输入轴102;环形齿轮106,连接于环形齿轮托架104;行星齿轮108,啮合设置于环形齿轮106的内侧而旋转;行星齿轮托架112,连接于行星齿轮108;输出轴114,轴连接于行星齿轮托架112;太阳齿轮110,啮合设置于行星齿轮108的内侧而旋转,并与输出轴114连接使输出轴114 能够旋转;一级变速部200,与太阳齿轮110结合而固定太阳齿轮110的旋转,使得动力源100的一方向旋转力通过输入轴102、旋转没有被固定的环形齿轮托架104、环形齿轮106、行星齿轮108、旋转没有被固定的行星齿轮托架 112被减速而传递到输出轴114,进而使得输出轴114
一方向旋转,从而实现一级变速;二级变速部300,结合环形齿轮托架104和行星齿轮托架112,使输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体,使得传递到输入轴102的动力源100的一方向旋转力在不被减速且方向不被改变的状态下传递到输出轴114,从而实现2级变速。
72.向电动汽车提供动力的动力源100可以是通过供电工作的电动马达。但是,在本技术的第一实施例中,动力源100可以同时使用电动马达和另一动力装置。通过电动马达的操作,输入轴102旋转使得环形齿轮托架104旋转。
73.环形齿轮托架104可以直接连接于接收动力源100的旋转力的输入轴 102或者通过另一连接部件连接于输入轴102。
74.环形齿轮106连接于环形齿轮托架104并根据环形齿轮托架104的旋转而旋转。
75.行星齿轮108啮合设置于环形齿轮106的内侧并进行旋转。
76.此时,与太阳齿轮110的外侧啮合的行星齿轮108可以按预定的间隔隔开而在太阳齿轮110的外侧设置多个。行星齿轮108可以与太阳齿轮的外侧啮合而进行自转的同时进行沿太阳齿轮110的外侧移动的公转。自转方向和公转方向彼此不同。
77.行星齿轮托架112连接于行星齿轮108并根据行星齿轮108的旋转而旋转。此时,行星齿轮托架112可以直接连接于行星齿轮108或者通过另一连接部件连接于行星齿轮108。
78.输出轴114连接于行星齿轮托架112并与行星齿轮托架112一起旋转。此时,输出轴114可以直接连接于行星齿轮托架112或者通过另一连接部件连接于行星齿轮托架112。
79.太阳齿轮110啮合设置于行星齿轮108的内侧并进行旋转,并以输出轴 114能够旋转的方式连接于输出轴114。
80.此时,太阳齿轮110可以通过诸如轴承等的旋转单元连接于输出轴114。
81.一级变速部200与太阳齿轮110结合而固定太阳齿轮110的旋转,并在太阳齿轮110的旋转固定的状态下实现一级变速。
82.即,在太阳齿轮110的旋转固定的状态下,接收动力源100的一方向旋转力的输入轴102沿一方向旋转,据此旋转没有被固定的环形齿轮托架104 沿一方向旋转,据此连接于环形齿轮托架104的环形齿轮106沿一方向旋转。据此,随着环形齿轮106沿一方向旋转,行星齿轮108沿与一方向不同的方向自转。通过该自转,可以实现所述环形齿轮106的一方向旋转速度的减速,行星齿轮108按该减速的一方向旋转速度沿着所述旋转固定的太阳齿轮110 沿一方向公转。所述减速的一方向的旋转力传递到旋转没有被固定的行星齿轮托架112,连接于行星齿轮托架112的输出轴114沿减速的一方向旋转,从而实现一级变速。
83.能够实现如此的一级变速的一级变速部200包括:套筒引导件202,固定连接于太阳齿轮110;固定套筒引导件204,与套筒引导件202隔开设置;一级变速套筒206,在固定套筒引导件204上滑动移动而与套筒引导件202 结合或者解除结合;一级变速叉208,与一级变速套筒206可旋转地连接;一级变速叉驱动轴210,按使一级变速叉208可直线移动的方式与一级变速叉208连接;一级变速致动器马达212,使一级变速叉驱动轴210旋转。
84.接收一级变速致动器马达212的旋转力而旋转的一级变速叉驱动轴210 和一级变速叉208可以以滚珠丝杠方式或者梯形螺纹结合方式紧固。据此,一级变速叉208可以沿旋转的一级变速叉驱动轴210而进行直线移动。滚珠丝杠方式可以用于需要精密变速的电动汽车的变速系统,梯形螺纹结合方式可以用于需要高输出变速的电动汽车的变速系统。
85.一级变速套筒206可滑动地设置在套筒引导件202及固定套筒引导件 204中每一个的外侧。
86.一级变速套筒206在内侧形成有齿形,套筒引导件202及固定套筒引导件204中的每一个在外侧形成有齿形。据此,一级变速叉208相对于一级变速叉驱动轴210直线移动,一级变速套筒206使套筒引导件202和固定套筒引导件204结合或者解除结合。当套筒引导件202和固定套筒引导件204结合时太阳齿轮110的旋转被固定,当套筒引导件202和固定套筒引导件204 的结合被解除时太阳齿轮110能够旋转。
87.此时,套筒引导件202和固定套筒引导件204借由一级变速套筒206结合,其结合方式可以利用爪型或者同步型方式。
88.另外,二级变速部300结合环形齿轮托架104和行星齿轮托架112,使输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体,使得传递到输入轴102的动力源100的一方向旋转力按不减速状态在旋转方向不改变的情况下原样地传递到输出轴 114,从而实现二级变速。
89.此时,当输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体时,传递到输入轴102的动力源100的一方向的旋转力以不被减速的状态传递到行星齿轮108。行星齿轮 108与旋转没有被固定的太阳齿轮110啮合而沿一方向旋转,并且行星齿轮 108的一方向旋转力通过行星齿轮托架112在方向不转换的情况下原样地传递到输出轴114,从而实现二级变速。
90.如此的二级变速部300包括:二级变速箱302,固定在行星齿轮托架112;二级变速套筒304,在二级变速箱302上滑动移动而与环形齿轮托架104结合或者解除该结合;二级变速叉306,与二级变速套筒304可旋转地连接;二级变速叉驱动轴308,按使二级变速叉306可直线移动的方式与二级变速叉306连接;二级变速致动器马达310,使二级变速叉驱动轴308旋转。
91.接收二级变速致动器马达310的旋转力而旋转的二级变速叉驱动轴308 和二级变速叉306可以以滚珠丝杠方式或者梯形螺纹结合方式紧固。据此,二级变速叉306可沿旋转的二级变速叉驱动轴308而进行直线移动。
92.二级变速箱302设置在与环形齿轮托架104隔开的后方并固定连接于行星齿轮托架112。
93.二级变速套筒304能够滑动移动地设置在二级变速箱302的外侧。
94.二级变速套筒304在内侧形成有齿形,二级变速箱302及环形齿轮托架 104中的每一个在外侧形成有齿形。据此,由于二级变速叉306直线移动到二级变速叉驱动轴308,二级变速套筒206使二级变速箱和环形齿轮托架104 结合或者解除结合。
95.此时,二级变速箱302及环形齿轮托架104借由二级变速套筒304结合,其结合方式可以利用爪型或者同步型方式。
96.根据本技术的第一实施例的电动汽车用变速系统还可以包括变速控制部 500。
97.在一级变速时,变速控制部500控制一级变速部200使太阳齿轮110和一级变速部200结合而固定太阳齿轮110的旋转,同时控制二级变速部300 使环形齿轮托架104和行星齿轮托架112不结合。
98.在二级变速时,变速控制部500控制二级变速部300来结合环形齿轮托架104和行
星齿轮托架112,使输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体,并且控制一级变速部200来使太阳齿轮110和一级变速部200不结合,从而使太阳齿轮110 的旋转不被固定。
99.另外,在倒车变速时,作为一实施例,变速控制部500控制一级变速部 200使太阳齿轮110和一级变速部200结合,从而固定太阳齿轮110的旋转,同时控制二级变速部300使环形齿轮托架104和行星齿轮托架112不被结合的状态下,可以控制动力源100使动力源100的另一方向的旋转力传递到输入轴102。
100.作为另一实施例,在倒车变速时,变速控制部500控制二级变速部300 结合环形齿轮托架104和行星齿轮托架112,使输入轴102、环形齿轮托架 104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体,与此同时,控制一级变速部200使太阳齿轮110和一级变速部200 不被结合的状态下,可以控制动力源100使动力源100的另一方向的旋转力传递到输入轴102。
101.根据本技术的第一实施例的电动汽车用变速系统利用一级变速致动器马达212和二级变速致动器马达310的两个致动器马达,为了一级变速、二级变速或者倒车变速而实现了一级变速套筒206和二级变速套筒304的直线移动。
102.不局限于此,取代一级变速致动器马达212和二级变速致动器马达310 的两个致动器马达,可以利用一个致动器马达来实现一级变速套筒206和二级变速套筒304的直线移动。
103.即,一个致动器马达配备两个驱动轴,即配备一级变速叉驱动轴210和二级变速叉驱动轴308,所述一个致动器马达根据变速控制部500的控制而在一级变速、二级变速或者倒车变速时使一级变速叉驱动轴210上的一级变速叉208和二级变速叉驱动轴308上的二级变速叉306直线移动。
104.据此,实现了连接于一级变速叉208的一级变速套筒206的直线移动和连接于二级变速叉306的二级变速套筒304的直线移动,从而可以实现一级变速、二级变速或者倒车变速。
105.下面说明如此的根据本技术的第一实施例的电动汽车用变速系统的操作,即一级变速、二级变速及倒车变速操作。
106.首先,参照图1对一级变速操作进行说明。
107.参照图1,在一级变速时,变速控制部500控制一级变速部200使一级变速部200和太阳齿轮110结合而固定太阳齿轮110的旋转,同时控制二级变速部300解除环形齿轮托架104和行星齿轮托架112的结合,使环形齿轮托架104和行星齿轮托架112能够旋转。
108.即,根据变速控制部500的控制,一级变速致动器马达212使一级变速叉驱动轴210旋转而使一级变速叉208在一级变速叉驱动轴210进行直线移动,与一级变速叉208可移动地连接的一级变速套筒206从固定套筒引导件 204移动到套筒引导件202,从而使固定套筒引导件204和套筒引导件202结合。因此,连接于套筒引导件202的太阳齿轮110固定到固定套筒引导件204,最终太阳齿轮110的旋转被固定。
109.另外,根据变速控制部500的控制,二级变速致动器马达310不驱动,从而二级变速叉驱动轴308不旋转,使得二级变速叉306在二级变速叉驱动轴308不进行直线移动。结果,可旋转地连接于二级变速叉的二级变速套筒 304在二级变速箱302不进行滑动移动。连接
于二级变速箱302的行星齿轮托架112和环形齿轮托架104不结合。因此,环形齿轮托架104和行星齿轮托架112的旋转不被固定。
110.在这种状态下,变速控制部500控制动力源100沿一方向a旋转。由此,动力源100的一方向旋转力在太阳齿轮110的旋转固定的状态下传递到输入轴102,从而输入轴102沿一方向a旋转。
111.因此,旋转没有被固定的环形齿轮托架104沿一方向a旋转,因此,连接于环形齿轮托架104的环形齿轮106沿一方向a旋转。根据环形齿轮106 的一方向a旋转,行星齿轮108沿与一方向a不同的另一方向b自转。通过该自转,实现了所述环形齿轮106的一方向旋转速度的减速,并且通过该减速的一方向旋转速度,行星齿轮108沿着所述旋转固定的太阳齿轮110沿一方向a公转。所述减速的一方向a的旋转力传递到旋转没有被固定的行星齿轮托架112,连接于行星齿轮托架112的输出轴114沿减速的一方向a旋转,从而实现一级变速。
112.现在,参照图2对二级变速操作进行说明。
113.参照图2,在二级变速时,变速控制部500控制二级变速部300使环形齿轮托架104和行星齿轮托架112结合而使得输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体,同时控制一级变速部200使一级变速部200和太阳齿轮110不结合而使得太阳齿轮110的旋转不被固定。
114.即,随着变速控制部500的控制,二级变速致动器马达310使二级变速叉驱动轴308旋转而使得二级变速叉306在二级变速叉驱动轴308进行直线移动,与二级变速叉306可旋转地连接的二级变速套筒304从二级变速箱302 移动到环形齿轮托架104,从而环形齿轮托架104和固定在二级变速箱302 的行星齿轮托架112结合。因此,输入轴102、环形齿轮托架104、环形齿轮 106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体。
115.另外,根据变速控制部500的控制,一级变速致动器马达212不被驱动而使一级变速叉驱动轴210不旋转,从而一级变速叉208在一级变速叉驱动轴210不进行直线移动。结果,可旋转地连接于一级变速叉的一级变速套筒 206在固定套筒引导件不进行滑动移动。因此,固定套筒引导件204和连接于套筒引导件202的太阳齿轮110不结合。结果,太阳齿轮110的旋转不被固定。
116.在这种状态下,变速控制部500控制动力源100使其沿一方向a旋转。
117.由于输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体,传递到输入轴102的动力源100 的一方向旋转力按不被减速的状态在旋转方向不改变的情况下原样地传递到输出轴114,从而实现二级变速。
118.即,当输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体时,传递到输入轴102的动力源100的一方向a的旋转力按不减速的状态传递到行星齿轮108。行星齿轮 108与旋转没有被固定的太阳齿轮110啮合而沿一方向a旋转,并且行星齿轮108的一方向旋转力通过行星齿轮托架112在方向不转换的情况下原样地传递到输出轴114,从而实现二级变速。
119.最后,对倒车变速操作进行说明。
120.倒车变速操作沿与作为用于电动汽车的前进的一级变速或者二级变速时的动力源100的旋转力方向的一方向a不同的方向b将动力源100的旋转力传递到输入轴102即可。
121.即,通过一级变速来执行倒车变速或者通过二级变速来执行倒车变速。
122.首先,对通过一级变速而进行倒车变速的过程进行说明。
123.当通过一级变速而进行倒车变速时,变速控制部500控制一级变速部200 使一级变速部200和太阳齿轮110结合来固定太阳齿轮110的旋转,同时控制二级变速部300解除环形齿轮托架104和行星齿轮托架112的结合,使环形齿轮托架104和行星齿轮托架112能够旋转。
124.即,根据变速控制部500的控制,一级变速致动器马达212旋转一级变速叉驱动轴210而使一级变速叉208在一级变速叉驱动轴210进行直线移动,并且与一级变速叉208可旋转地连接的一级变速套筒206从固定套筒引导件 204移动到套筒引导件202,从而没有固定的套筒引导件和套筒引导件202结合。因此,连接于套筒引导件202的太阳齿轮110固定到固定套筒引导件204,结果太阳齿轮110的旋转被固定。
125.另外,根据变速控制部500的控制,二级变速致动器马达310不被驱动而使得二级变速叉驱动轴308不旋转,从而二级变速叉306在二级变速叉驱动轴308不进行直线移动。结果,可旋转地连接于二级变速叉306的二级变速套筒304在二级变速箱302不进行滑动移动。连接于二级变速箱302的行星齿轮托架112和环形齿轮托架104不结合。因此,环形齿轮托架104和行星齿轮托架112的旋转不被固定。
126.在这种状态下,变速控制部500控制动力源100使其不沿所述一方向a 而沿另一方向b旋转。因此,动力源100沿另一方向的旋转力在太阳齿轮110 的旋转固定的状态下传递到输入轴102使得输入轴102沿另一方向旋转。因此,旋转没有被固定的环形齿轮托架104沿另一方向b旋转,据此连接于环形齿轮托架104的环形齿轮106沿另一方向旋转。根据环形齿轮106沿另一方向b的旋转,行星齿轮108不沿另一方向b而沿一方向a自转。通过该自转,实现所述环形齿轮106的另一方向旋转速度的减速,并且通过该减速的另一方向的旋转速度,行星齿轮108沿着所述旋转固定的太阳齿轮110沿另一方向b公转。所述减速的另一方向b的旋转力传递到旋转没有被固定的行星齿轮托架112,连接于行星齿轮托架112的输出轴114沿减速的另一方向旋转,从而实现倒车变速。
127.现在对通过二级变速操作实现倒车变速的过程进行说明。
128.当通过二级变速而进行倒车变速时,变速控制部500控制二级变速部300 使环形齿轮托架104和行星齿轮托架112结合使得输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体,同时控制一级变速部200使一级变速部200和太阳齿轮110不结合,从而使太阳齿轮110的旋转不被固定。
129.即,根据变速控制部500的控制,二级变速致动器马达310使二级变速叉驱动轴308旋转,使得二级变速叉306在二级变速叉驱动轴308进行直线移动,与二级变速叉306可旋转地连接的二级变速套筒304从二级变速箱302 移动到环形齿轮托架104,从而使环形齿轮托架104和固定到二级变速箱302 的行星齿轮托架112结合。因此,输入轴102、环形齿轮托架104、环形齿轮 106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体。
130.另外,根据变速控制部500的控制,一级变速致动器马达212不被驱动使得一级变速叉驱动轴210不旋转,从而一级变速叉208不在一级变速叉驱动轴210进行直线移动。结果,可旋转地连接于一级变速叉的一级变速套筒 206在固定套筒引导件204不进行滑动移动。因此,固定套筒引导件204和连接于套筒引导件202的太阳齿轮110不结合。结果,太阳齿轮110的旋转不被固定。
131.在这种状态下,变速控制部500控制动力源100使其不沿述一方向a而沿另一方向b旋转。
132.由于输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体,传递到输入轴102的动力源100 的另一方向旋转力按不减速的状态在旋转方向不被改变的情况下直接传递到输出轴114,从而实现倒车变速。
133.即,当输入轴102、环形齿轮托架104、环形齿轮106、行星齿轮108、行星齿轮托架112及输出轴114成为一个主体时,传递到输入轴102的动力源100的一方向a的旋转力按不减速的状态传递到行星齿轮108。行星齿轮 108与旋转没有被固定的太阳齿轮110啮合而沿另一方向b旋转,并且行星齿轮108的另一方向旋转力通过行星齿轮托架112在方向不转换的情况下原样地传递到输出轴114,从而实现二级变速。
134.图1及图2中示出的一方向a及另一方向b表示彼此相反的方向,只不过是一种示例而并不局限于此。即,假定图1及图2中示出的一方向a为顺时针方向,那么另一方向b是逆时针方向,而假如一方向a为逆时针方向,那么另一方向b是顺时针方向。
135.以上,对于本技术,以第一实施例为中心进行了说明。本技术所属的技术领域中具有普通知识的人可以理解的是,可以在不脱离本技术本质特征的范围内以变形的形态实施。
136.因此,所公开的第一实施例应当理解为说明性的,而不是限定性的。因此,本技术的范围应当解释为并不局限于前述的第一实施例而包括权利要求书记载的内容及与其等同的范围内的多样的实施形态。
137.以下,参照图3至图5,对根据本技术的第二实施例的电动汽车用变速系统进行说明。
138.图3是表示根据本技术的第二实施例的能够进行倒车控制的电动汽车用变速系统的构成的图。
139.参照图3,根据本技术的第二实施例的电动汽车用变速系统包括:动力源100,提供动力;输入轴102,设置为从动力源100接收旋转力;太阳齿轮 110,轴连接于输入轴102而旋转;行星齿轮108,啮合设置于太阳齿轮110 的外侧;行星齿轮托架112,支撑行星齿轮108使其在输入轴102能够旋转;输出轴114,连接于行星齿轮托架112;环形齿轮106,设置于行星齿轮托架 112的外侧并啮合于行星齿轮108;环形齿轮托架104,支撑环形齿轮106使其在输出轴114能够旋转;单向离合器(one way clutch)140,只允许环形齿轮106的一方向旋转;前进变速部122,固定结合于输入轴102而与太阳齿轮110一起旋转并结合于行星齿轮托架112或解除该结合来调节前进变速;倒车变速部130,可旋转地结合于输出轴114并结合于环形齿轮托架104或解除该结合来调节倒车变速。
140.此时,在前进变速部122和行星齿轮托架112处于不结合状态并且倒车变速部130和环形齿轮托架104处于不结合状态的情况下,单向离合器140 以工作状态作用而阻碍环形齿轮106沿一方向和另一方向的旋转,从而固定环形齿轮106的旋转。
141.另外,在前进变速部122和行星齿轮托架112处于结合状态并且倒车变速部130和环形齿轮托架104处于不结合状态的情况下,单向离合器140以非工作状态作用而允许环形齿轮106沿一方向旋转。
142.在前进变速部122和行星齿轮托架112处于不结合状态并且倒车变速部130和环形
齿轮托架104处于结合状态的情况下,单向离合器140以非工作状态作用而允许环形齿轮106沿一方向旋转。但是,由于倒车变速部130和环形齿轮托架104的结合而使环形齿轮106的旋转被固定。
143.向电动汽车提供动力的动力源100可以是通过供电工作的电动马达。但是,在本技术的第二实施例中,动力源100可以同时使用电动马达和另一动力装置。通过电动马达的操作,输入轴102旋转来使太阳齿轮110旋转。
144.太阳齿轮110可以直接连接于接收动力源100的旋转力的输入轴102或者通过另一连接部件连接于输入轴102。
145.与太阳齿轮110的外侧啮合的行星齿轮108可以按预定的间隔隔开而在太阳齿轮110的外侧设置多个。行星齿轮108可以与太阳齿轮的外侧啮合而进行自转的同时进行沿太阳齿轮110的外侧移动的公转。
146.固定于如此的行星齿轮108并且可旋转地连接于输入轴102的行星齿轮托架112可以通过行星齿轮108的旋转而旋转。
147.行星齿轮托架112可旋转地连接于输入轴102,在其旋转中心固定连接有输出轴114。据此,固定连接于行星齿轮托架112的输出轴114根据行星齿轮托架112的旋转而同时旋转。此时,行星齿轮托架112可以通过诸如轴承等的旋转单元连接于输入轴102。
148.在行星齿轮托架112的外侧设置有环形齿轮106,沿环形齿轮106的内侧形成有齿形。在环形齿轮106的内侧啮合行星齿轮108。行星齿轮108通过太阳齿轮110的旋转而旋转并沿着环形齿轮106移动。
149.环形齿轮106连接于只允许环形齿轮106的一方向旋转的单向离合器 140。
150.在前进变速部122没有结合于行星齿轮托架112并且倒车变速部130没有结合于环形齿轮托架104而实现一级变速的情况下,由于单向离合器140 以工作状态作用而只允许环形齿轮106的一方向旋转,因此阻碍了环形齿轮 106沿另一方向的旋转,从而固定环形齿轮106。
151.例如,当实现一级变速并接收动力源100的旋转力的旋转轴沿顺时针方向旋转时,单向离合器140以工作状态作用允许环形齿轮106沿逆时针方向的旋转,但是阻碍环形齿轮106沿顺时针方向的旋转,从而固定了环形齿轮 106。
152.如上所述,当单向离合器140处于工作状态时,图3示出的单向离合器140表示为黑色三角形。
153.另外,在前进变速部122结合于行星齿轮托架112的同时倒车变速部130 没有结合于环形齿轮托架104而实现二级变速的情况下,以及在前进变速部 122没有结合于行星齿轮托架112并且倒车变速部130结合于环形齿轮托架 104而实现倒车变速的情况下,单向离合器140以非工作状态作用而允许环形齿轮106的一方向旋转。
154.此时,当单向离合器140处于非工作状态时,图4及图5示出的单向离合器140表示为白色三角形。
155.这种单向离合器140可以是在内轮与外轮之间配备有允许环形齿轮106 沿一方向旋转的多个凸轮的斜撑离合器。在本技术的第二实施例中单向离合器140可以是在内轮和外轮之间配备有阻碍环形齿轮106沿顺时针方向的旋转的结构,即,允许环形齿轮106沿逆时针方向的旋转的结构的多个凸轮的斜撑离合器。
156.前进变速部122包括:前进变速箱116,固定连接于接收动力源100的旋转力的输入轴102;前进变速套筒118,在前进变速箱116滑动移动而结合于行星齿轮托架112或解除该结合;前进变速叉120,与前进变速套筒118 可旋转地连接;前进变速叉驱动轴134,按使前进变速叉120能够进行直线移动的方式与前进变速叉120连接,;前进变速致动器马达132,使前进变速叉驱动轴134旋转。
157.此时,接收前进变速致动器马达132的旋转力而旋转的前进变速叉驱动轴134和前进变速叉120可以以滚珠丝杠方式或者梯形螺纹结合方式紧固。据此,前进变速叉120能够沿着旋转的前进变速叉驱动轴134而进行直线移动。滚珠丝杠方式可以用于需要精密变速的电动汽车的变速系统,梯形螺纹结合方式可以用于需要高输出变速的电动汽车的变速系统。
158.前进变速箱116设置在与行星齿轮托架112隔开的前方而固定连接于输入轴102,通过输入轴102的旋转而与太阳齿轮110一起旋转。
159.前进变速套筒118可滑动移动地设置在前进变速箱116的外侧。
160.前进变速套筒118在内侧形成有齿形,前进变速箱116及行星齿轮托架 112在外侧形成有齿形。据此,由于前进变速叉120沿着前进变速叉驱动轴 134直线移动,前进变速套筒118使前进变速箱116和行星齿轮托架112结合或者解除结合。
161.此时,前进变速箱116及行星齿轮托架112借由前进变速套筒118结合,其结合方式可以利用爪型或者同步型方式。
162.倒车变速部130包括:倒车变速箱124,可旋转地连接于固定连接于行星齿轮托架112而旋转的输出轴114;倒车变速套筒126,在倒车变速箱124 进行滑动移动而结合于环形齿轮托架104或者解除该结合;倒车变速叉128,可旋转地连接于倒车变速套筒126;倒车变速叉驱动轴136,按使倒车变速叉 128能够进行直线移动的方式与倒车变速叉128连接;倒车变速致动器马达 138,使倒车变速叉驱动轴136旋转。
163.此时,接收倒车变速致动器马达138的旋转力而旋转的倒车变速叉驱动轴136和倒车变速叉128可以以滚珠丝杠方式或者梯形螺纹结合方式紧固。据此,倒车变速叉128能够沿着旋转的倒车变速叉驱动轴136而进行直线移动。滚珠丝杠方式可以用于需要精密变速的电动汽车的变速系统,梯形螺纹结合方式可以用于需要高输出变速的电动汽车的变速系统。
164.倒车变速箱124设置在与环形齿轮托架104隔开的后方而可旋转地连接于输出轴114。此时,倒车变速箱124可以通过诸如轴承等的旋转单元连接于输出轴114。
165.倒车变速套筒126可滑动移动地设置在倒车变速箱124的外侧。
166.倒车变速套筒126在内侧形成有齿形,倒车变速箱124及环形齿轮托架 104在外侧形成有齿形。据此,由于倒车变速叉128沿着倒车变速叉驱动轴 136直线移动,倒车变速套筒126使倒车变速箱124和环形齿轮托架104结合或者解除结合。
167.倒车变速箱124及环形齿轮托架104借由倒车变速套筒126结合,其结合方式可以利用爪型或者同步型方式。
168.根据本技术的第二实施例的电动汽车用变速系统利用前进变速致动器马达132和倒车变速致动器马达138的两个致动器马达而实现了用于前进变速或者倒车变速的前进变速套筒118和倒车变速套筒126的直线移动。
169.但不局限于此,取代前进变速致动器马达132和倒车变速致动器马达138 的两个致动器马达,可以利用一个致动器马达来实现前进变速套筒118和倒车变速套筒126的直线移动。
170.即,一个致动器马达配备两个驱动轴,即配备前进变速叉驱动轴134和倒车变速叉驱动轴136,所述一个致动器马达根据控制部500的控制而在一级变速或者二级变速和倒车变速时,使前进变速叉驱动轴134上的前进变速叉120和倒车变速叉驱动轴136上的倒车变速叉128直线移动。
171.据此,实现了连接于前进变速叉120的前进变速套筒118的直线移动和连接于倒车变速叉128的倒车变速套筒126的直线移动,从而能够实现前进变速(一级变速或者二级变速)或者倒车变速。
172.根据本技术的第二实施例的电动汽车用变速系统还可以包括变速控制部 500。
173.在一级变速时,变速控制部500控制前进变速部122不结合于行星齿轮托架112,并控制倒车变速部130不结合于环形齿轮托架104。
174.具体地,在一级变速时,变速控制部500进行控制来使得前进变速部122 的前进变速套筒118维持不结合于行星齿轮托架112的中立状态,并且倒车变速部130的倒车变速套筒126维持不结合于环形齿轮托架104的中立状态。
175.此时,在一级变速时,如图3所示,单向离合器140可以是工作状态(单向离合器140表示为黑色三角形)。
176.另外,在二级变速时,变速控制部500控制前进变速部122结合于行星齿轮托架112,控制倒车变速部130不结合于环形齿轮托架104。
177.具体地,在二级变速时,变速控制部500进行控制使得,前进变速部122 的前进变速套筒118结合于行星齿轮托架112并且倒车变速部130的倒车变速套筒126维持不结合于环形齿轮托架104的中立状态。
178.此时,在二级变速时,如图4所示,单向离合器140可以是非工作状态 (单向离合器140表示为白色三角形)。
179.最后,在倒车变速时,变速控制部500控制前进变速部122不结合于行星齿轮托架112,控制倒车变速部130结合于环形齿轮托架104。
180.具体地,在倒车变速时,变速控制部500进行控制使得前进变速部122 的前进变速套筒118维持不结合于行星齿轮托架112的中立状态,并且倒车变速部130的倒车变速套筒结合于环形齿轮托架104。
181.此时,在倒车变速时,如图5所示,单向离合器140可以是非工作状态 (单向离合器140表示为白色三角形)。
182.下面说明如此的根据本技术的第二实施例的能够控制倒车的电动汽车用变速系统的操作,即,一级变速、二级变速及倒车变速操作。
183.首先,参照图3对一级变速操作进行说明。
184.参照图3,在一级变速时,变速控制部500控制前进变速部122不结合于行星齿轮托架112,控制倒车变速部130不结合于环形齿轮托架104。
185.具体地,在一级变速时,变速控制部500进行控制使得前进变速部122 的前进变速套筒118维持不结合于行星齿轮托架112的中立状态,并且倒车变速部130的倒车变速套筒
维持不结合于环形齿轮托架104的中立状态。
186.在此状态下,当通过动力源100的运行,输入轴102沿顺时针方向旋转时,太阳齿轮110与输入轴102一起沿顺时针方向旋转。啮合于太阳齿轮110 的行星齿轮108沿逆时针方向自转。啮合于行星齿轮108的环形齿轮106将相对于行星齿轮108的逆时针方向的自转运动而沿顺时针方向旋转。但是,具有阻碍环形齿轮106沿顺时针方向的旋转的结构,即,允许环形齿轮106 沿逆时针方向的旋转的结构的单向离合器140以工作状态作用而阻碍环形齿轮106沿顺时针方向的旋转,从而无法实现环形齿轮106的旋转。
187.如此,在工作状态下,由于环形齿轮106沿顺时针方向的旋转借由单向离合器140被固定,因此与环形齿轮106啮合的行星齿轮108沿逆时针方向自转的同时沿着环形齿轮106沿顺时针方向进行公转运动。固定于行星齿轮 108的行星齿轮托架112也沿与行星齿轮108的公转方向相同的方向(顺时针方向)旋转。
188.由于行星齿轮108沿逆时针方向自转的同时沿着环形齿轮106沿顺时针方向公转,因此行星齿轮108的公转速度因行星齿轮108的逆时针方向的旋转而被减速,从而行星齿轮108的公转速度会比太阳齿轮110的旋转速度慢。固定于行星齿轮108的行星齿轮托架112以与减速的行星齿轮108的公转方向的旋转速度相同的速度沿顺时针方向旋转,比太阳齿轮110的旋转速度慢。
189.即,当在环形齿轮106的旋转被约束的状态下驱动太阳齿轮110时,固定连接于行星齿轮托架112的旋转中心的输出轴114的旋转速度与因行星齿轮108沿逆时针方向的自转而被减速的行星齿轮108的公转速度相同,比太阳齿轮110的旋转速度慢,从而实现电动汽车的一级变速。
190.现在,将对二级变速进行说明。
191.参照图4,在二级变速时,变速控制部500控制前进变速部122结合于行星齿轮托架112,并控制倒车变速部130不结合于环形齿轮托架104。具体地,在二级变速时,变速控制部500进行控制使得前进变速部122的前进变速套筒118结合于行星齿轮托架112并且倒车变速部130的倒车变速套筒126 维持不结合于环形齿轮托架104的中立状态。
192.由于根据变速控制部500的控制,前进变速套筒118移动而使前进变速箱116和行星齿轮托架112结合,因此输入轴102、太阳齿轮110、前进变速箱116、前进变速套筒118、行星齿轮托架112及行星齿轮108成为一个主体。
193.在这种状态下,当动力源100工作而使输入轴102沿顺时针方向旋转时,输入轴102、太阳齿轮110、前进变速箱116、前进变速套筒118、行星齿轮托架112及行星齿轮108全部沿顺时针方向旋转。
194.即,与沿顺时针方向旋转的太阳齿轮110啮合的行星齿轮108及行星齿轮托架112以与太阳齿轮110的旋转速度相同的速度沿顺时针方向旋转。在这种状态下,啮合于沿顺时针方向旋转的行星齿轮108并且结合于允许逆时针方向的旋转的单向离合器140的环形齿轮106沿逆时针方向旋转。据此,固定连接于与行星齿轮108一起沿顺时针方向旋转的行星齿轮托架112的输出轴114的旋转速度不被减速,从而实现电动汽车的二级变速。
195.最后,对倒车变速操作进行说明。
196.参照图5,在倒车变速时,变速控制部500控制前进变速部122不结合于行星齿轮托架112,控制倒车变速部130结合于环形齿轮托架104。
197.具体地,在倒车变速时,变速控制部500进行控制使得前进变速部122 的前进变速套筒118维持不结合于行星齿轮托架112的中立状态,并且倒车变速部130的倒车变速套筒126结合于环形齿轮托架104。
198.当动力源100运行而使输入轴102沿逆时针方向旋转时,太阳齿轮110 与输入轴102一起沿逆时针方向旋转。啮合于太阳齿轮110的行星齿轮108 沿顺时针方向自转。
199.啮合于行星齿轮108的环形齿轮106相对于行星齿轮108的顺时针方向的自转而沿逆时针方向旋转。对此,单向离合器140以允许环形齿轮106的逆时针方向的非工作状态运行,但是环形齿轮106通过倒车变速套筒和环形齿轮托架104的结合而被固定。因此,不会实现环形齿轮106的逆时针方向旋转。
200.如此,在环形齿轮106被固定的状态下,啮合于环形齿轮106的行星齿轮108沿顺时针方向自转的同时沿着环形齿轮106沿逆时针方向公转。固定于行星齿轮108的行星齿轮托架112也沿与行星齿轮108的公转方向相同的方向(逆时针方向)旋转。
201.由于行星齿轮108沿顺时针方向自转的同时沿着环形齿轮106沿逆时针方向公转,因此行星齿轮108的公转速度因行星齿轮108沿顺时针方向的自转而被减速,从而变得比太阳齿轮110的旋转速度慢。固定于行星齿轮108 的行星齿轮托架112以与减速的行星齿轮108的公转方向旋转速度相同速度沿逆时针方向旋转,变得比太阳齿轮的旋转度慢。
202.即,当在环形齿轮106的旋转被约束的状态下,驱动太阳齿轮110时,固定连接于行星齿轮托架112的旋转中心的输出轴114的旋转速度与因行星齿轮108的顺时针方向的自转而被减速的行星齿轮108的公转速度相同,比太阳齿轮110的旋转速度慢,从而实现电动汽车的倒车变速。
203.在图3至图5中,以环形齿轮106的旋转约束被单向离合器140约束为例进行了说明。除了单向离合器140以外,环形齿轮106的旋转约束还可以通过包括制动系统(未示出)或者致动器等的旋转控制部来实现。即,制动系统或者致动器可以与单向离合器140一样只允许环形齿轮106的一方向旋转,可以在图3至图5所示的变速控制部500的控制下只允许环形齿轮106 的一方向旋转。
204.换言之,可以在图3至图5的构成中使用制动系统或者致动器代替单向离合器140,从而在1级变速时、2级变速时及倒车变速时控制环形齿轮106 的旋转。
205.在一级变速时,变速控制部500控制前进变速部122不结合于行星齿轮托架112并且控制倒车变速部130不结合于环形齿轮托架104,控制旋转控制部使得旋转控制部接触于要向与环形齿轮106的一方向不同的方向旋转的环形齿轮106来阻碍环形齿轮106沿另一方向的旋转,从而可以固定所述环形齿轮106的旋转。
206.在二级变速时,变速控制部500控制前进变速部122结合于行星齿轮托架112并且控制倒车变速部130不结合于环形齿轮托架104,控制旋转控制部使得旋转控制部不接触于环形齿轮106,从而允许沿一方向旋转的环形齿轮106的旋转。
207.在倒车变速时,变速控制部500控制前进变速部122不结合于行星齿轮托架112并且控制倒车变速部130结合于环形齿轮托架104,控制旋转控制部使得旋转控制部不接触于环形齿轮106,从而允许要向一方向旋转的环形齿轮106的旋转。然而,倒车变速时允许环形齿轮106的一方向旋转,但是可以通过倒车变速部130和环形齿轮托架104的结合来固定环形齿轮106的旋转。
whell drive)的电动汽车的动力传递系统。
219.由此,根据本技术的第三实施例的电动汽车用变速系统可以用于需要大输出的诸如重型装备车辆、公共汽车、卡车等的大型车辆。
220.结果,由于根据本技术的第三实施例的电动汽车用变速系统具有纵向型驱动力传递方式,因此可以执行适合于需要大输出的诸如重型装备车辆、货车或者公共汽车等的大型车辆和需要较快的速度和车辆中心平衡及高旋转惯性的运动车辆等的动力传递系统的作用。
221.进而,根据本技术的第三实施例的电动汽车用变速系统还可以配备驻车制动装置,以在停车时或出发时提高驾驶员的方便性,并预先防止因推挤而产生的碰撞危险。
222.所述驻车制动装置以实现为对所述输入轴102的旋转进行约束或解除约束的电子制动器或机械式驻车制动器。
223.所述电子制动器可设置于动力源100与变速器10之间的输入轴102。
224.所述机械式驻车制动器可以设置于与设置有所述动力源100的输入轴 102的一端相反侧的输入轴102的另一端。
225.到目前为止,对于本技术,以第三实施例为中心进行了说明。本技术所属的技术领域中具有普通知识的人可以理解的是,可以在不脱离本技术本质特征的范围内以变形的形态实施。因此,所公开的第三实施例应当理解为说明性的,而不是局限性的。因此,本技术的范围应当解释为并不局限于前述的第三实施例而包括权利要求书记载的内容及与其等同的范围内的多样的实施形态。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。