1.本实用新型涉及石油管道补漏应用领域,具体地讲,涉及一种管道修补机器人的伞状器机构。
背景技术:
2.随着我国科技水平不断发展,管道技术日益成熟,其问题也层出不穷,亟待解决。输油管道在多年传输过程中难免会出现腐蚀、人为盗油等造成的泄漏,尤其像西气东输等国家级项目往往会造成很大的石油天然气等资源损失,所以对于石油管道补漏方法急需解决,对石油管道进行带压封堵、带压补漏的技术并不成熟,大多采用人工外部补漏,进行焊接补漏,影响资源运输速率,经济损失比较大,目前市面上的补漏机器大多以外部辅助为主,对带压补漏技术相对不成熟。于是我们针对这一现象研发了一种内部暂时填补,辅助外部补漏,并不影响内部带压运作机构,所述结构解决了管道机器人在石油管道内部停止的问题。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种管道修补机器人的伞状器机构,有利于实现石油管道补漏。
4.本实用新型采用如下技术方案实现发明目的:
5.一种管道修补机器人的伞状器机构,包括伞状器机构,其特征是:所述伞状器机构包括伞状器锚定装置及伞状器开合装置,所述伞状器锚定装置包括主一组主支撑杆及一组副支撑杆,每个所述副支撑杆分别铰连接对应的所述主支撑杆,所述伞状器开合装置包括电机、联轴器、丝杆、丝杆螺母及主推杆,所述电机的输出轴固定连接所述联轴器,所述联轴器固定连接所述丝杆的一端,所述丝杆螺纹连接所述丝杆螺母,所述丝杆穿过所述主推杆,所述丝杆螺母固定连接所述主推杆,每个所述主支撑杆分别铰连接伞状器底座,每个所述副支撑杆分别铰连接所述主推杆,所述丝杆轴承连接所述伞状器底座。
6.作为本技术方案的进一步限定,所述联轴器轴承连接固定端,所述固定端固定连接一组沿圆周方向均匀分布的光杆,每个所述光杆分别穿过所述丝杆螺母,每个所述光杆分别穿过所述主推杆,每个所述光杆分别固定连接所述伞状器底座。
7.作为本技术方案的进一步限定,所述固定端固定连接保护壳,所述保护壳固定连接所述伞状器底座。
8.作为本技术方案的进一步限定,所述保护壳设置有一组沿圆周方向均匀分布的直槽,每个所述主支撑杆分别设置在对应的所述直槽内,每个所述副支撑杆分别设置在对应的所述直槽内。
9.作为本技术方案的进一步限定,每个所述主支撑杆分别固定连接电磁装置。
10.与现有技术相比,本实用新型的优点和积极效果是:
11.(1)伞状器制动装置是通过伞状器的展开使顶端磁吸装置吸附管壁,进行减速和
制动;
12.(2)通过电机正反转,带动丝杆螺母进行上下运动,从而使主推器推动主副支撑杆使其展开或收起,操作简单方便。
13.本实用新型为管道修补机器人的伞状器机构,有利于实现石油管道补漏。
附图说明
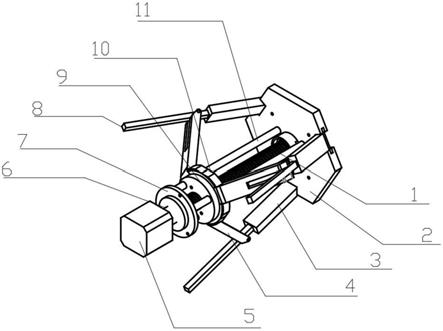
14.图1为本实用新型的立体结构示意图一。
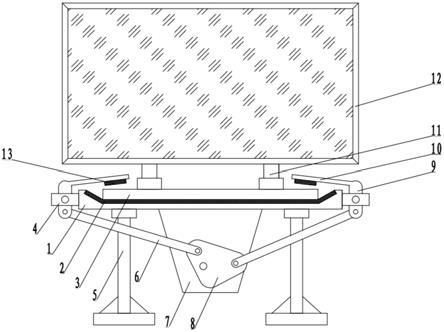
15.图2为本实用新型的立体结构示意图二。
16.图3为本实用新型的控制器电路原理图。
17.图中:1、丝杆,2、伞状器底座,3、主支撑杆,4、副支撑杆,5、电机, 6、联轴器,7、固定端,8、电磁装置,9、丝杆螺母,10、主推杆,11、光杆, 12、保护壳,13、直槽。
具体实施方式
18.下面结合附图,对本实用新型的一个具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
19.如图1
‑
图3所示,本实用新型包括伞状器机构,所述伞状器机构包括伞状器锚定装置及伞状器开合装置,所述伞状器锚定装置包括主一组主支撑杆3及一组副支撑杆4,每个所述副支撑杆4分别铰连接对应的所述主支撑杆3,所述伞状器开合装置包括电机5、联轴器6、丝杆1、丝杆螺母9及主推杆10,所述电机5的输出轴固定连接所述联轴器6,所述联轴器6固定连接所述丝杆1的一端,所述丝杆1螺纹连接所述丝杆螺母9,所述丝杆1穿过所述主推杆10,所述丝杆螺母9固定连接所述主推杆10,每个所述主支撑杆3分别铰连接伞状器底座2,每个所述副支撑杆4分别铰连接所述主推杆10,所述丝杆1轴承连接所述伞状器底座2。
20.所述联轴器6轴承连接固定端7,所述固定端7固定连接一组沿圆周方向均匀分布的光杆11,每个所述光杆11分别穿过所述丝杆螺母9,每个所述光杆11 分别穿过所述主推杆10,每个所述光杆11分别固定连接所述伞状器底座2。
21.所述固定端7固定连接保护壳12,所述保护壳12固定连接所述伞状器底座 2。
22.所述保护壳12设置有一组沿圆周方向均匀分布的直槽13,每个所述主支撑杆3分别设置在对应的所述直槽13内,每个所述副支撑杆4分别设置在对应的所述直槽13内。
23.每个所述主支撑杆3分别固定连接电磁装置8。
24.所述电机5通过电机支架固定连接所述保护壳12(图上未画出)。
25.所述伞状器底座2及所述固定端7对所述丝杆螺母9进行极限位置固定。
26.所述电机5及所述电磁装置8分别电性连接控制器,所述控制器无线连接上位机,所述上位机为pc。
27.本实用新型工作流程为:初始状态时,主支撑杆3收起,将本装置安装到管道修补机器人上,使管道修补机器人带动本装置沿管道移动,当道修补机器人检测到管道壁上漏洞后,将信息发送给pc,通过pc打开控制器,控制器先打开电机5,电机5带动联轴器6转动,联轴器6带动丝杆1转动,丝杆1带动丝杆螺母9沿光杆11移动,丝杆螺母9带动主推杆10沿光杆11移动,主推杆10 带动副支撑杆4摆动,副支撑杆4带动主支撑杆3摆动扩散开,主支撑杆3带动电磁装置8摆动,使电磁装置8接触管道,控制器关闭电机5,控制器控制电磁装置8通
电,使电磁装置8吸附于管壁上,从而实现锚定。
28.以上公开的仅为本实用新型的一个具体实施例,但是,本实用新型并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
技术特征:
1.一种管道修补机器人的伞状器机构,包括伞状器机构,其特征是:所述伞状器机构包括伞状器锚定装置及伞状器开合装置;所述伞状器锚定装置包括主一组主支撑杆(3)及一组副支撑杆(4),每个所述副支撑杆(4)分别铰连接对应的所述主支撑杆(3);所述伞状器开合装置包括电机(5)、联轴器(6)、丝杆(1)、丝杆螺母(9)及主推杆(10),所述电机(5)的输出轴固定连接所述联轴器(6),所述联轴器(6)固定连接所述丝杆(1)的一端,所述丝杆(1)螺纹连接所述丝杆螺母(9),所述丝杆(1)穿过所述主推杆(10),所述丝杆螺母(9)固定连接所述主推杆(10);每个所述主支撑杆(3)分别铰连接伞状器底座(2);每个所述副支撑杆(4)分别铰连接所述主推杆(10);所述丝杆(1)轴承连接所述伞状器底座(2)。2.根据权利要求1所述的管道修补机器人的伞状器机构,其特征是:所述联轴器(6)轴承连接固定端(7),所述固定端(7)固定连接一组沿圆周方向均匀分布的光杆(11),每个所述光杆(11)分别穿过所述丝杆螺母(9),每个所述光杆(11)分别穿过所述主推杆(10),每个所述光杆(11)分别固定连接所述伞状器底座(2)。3.根据权利要求2所述的管道修补机器人的伞状器机构,其特征是:所述固定端(7)固定连接保护壳(12),所述保护壳(12)固定连接所述伞状器底座(2)。4.根据权利要求3所述的管道修补机器人的伞状器机构,其特征是:所述保护壳(12)设置有一组沿圆周方向均匀分布的直槽(13),每个所述主支撑杆(3)分别设置在对应的所述直槽(13)内,每个所述副支撑杆(4)分别设置在对应的所述直槽(13)内。5.根据权利要求1所述的管道修补机器人的伞状器机构,其特征是:每个所述主支撑杆(3)分别固定连接电磁装置(8)。
技术总结
本实用新型公开了一种管道修补机器人的伞状器机构,包括伞状器机构,其特征是:所述伞状器机构包括伞状器锚定装置及伞状器开合装置,所述伞状器锚定装置包括主一组主支撑杆及一组副支撑杆,每个所述副支撑杆分别铰连接对应的所述主支撑杆,所述伞状器开合装置包括电机、联轴器、丝杆、丝杆螺母及主推杆,所述电机的输出轴固定连接所述联轴器,所述联轴器固定连接所述丝杆的一端,所述丝杆螺纹连接所述丝杆螺母。本实用新型涉及石油管道补漏应用领域,具体地讲,涉及一种管道修补机器人的伞状器机构。本实用新型为管道修补机器人的伞状器机构,有利于实现石油管道补漏。有利于实现石油管道补漏。有利于实现石油管道补漏。
技术研发人员:赵淑萍 宋开功 张思昊 张耘皓 赵松沅 刘润升 郭佳祺 李旭 王彩霞
受保护的技术使用者:山东协和学院
技术研发日:2021.01.22
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。