1.本发明涉及一种对可动体的直线运动或曲线运动进行引导的运动引导装置。
背景技术:
2.运动引导装置利用滚珠、滚柱等滚动体的滚动运动,来对工作台等可动体的运动(直线运动或曲线运动)进行引导。运动引导装置具备:轨道构件、以及能够沿着轨道构件移动的移动体。在轨道构件与移动体之间夹设有滚珠、滚柱等多个滚动体。通过利用滚动体的滚动运动来对可动体进行引导,能够高精度且高刚性地引导可动体。
3.在轨道构件形成有滚动体滚行部。在移动体形成有与轨道构件的滚动体滚行部对置的负载滚动体滚行部、与由滚动体滚行部和负载滚动体滚行部形成的负载路平行的返回路、以及方向转换路。由负载路、返回路及方向转换路构成跑道状的无限循环路。在负载路、返回路及方向转换路配置有多个滚动体。当移动体相对于轨道构件进行相对移动时,滚动体在无限循环路中进行循环。
4.多个滚动体中的至少一个被保持于保持器。在负载路、返回路及方向转换路形成有供保持器的宽度方向的端部进入的槽。槽是为了引导保持器的循环而设置的。另外,槽是为了防止在从轨道构件卸下移动体时保持器从移动体脱落而设置的。
5.在先技术文献
6.专利文献
7.专利文献1:日本特开2012
‑
220014号公报
技术实现要素:
8.发明要解决的课题
9.但是,在现有的运动引导装置中,供保持器的宽度方向的端部进入的槽的宽度在负载路、返回路及方向转换路中形成为恒定。因此,当保持器在返回路、方向转换路、负载路中移动时,相反地当保持器在负载路、方向转换路、返回路中移动时,特别是在保持器与方向转换路的槽的壁面接触的情况下,保持器循环时的阻力有可能变动。
10.因此,本发明的目的在于提供一种能够在从轨道构件卸下移动体时防止保持器的脱落,并且能够减轻保持器循环时的阻力的变动的运动引导装置。
11.用于解决课题的方案
12.为了解决上述课题,本发明的一个实施方式是一种运动引导装置,所述运动引导装置具备:轨道构件,其具有滚动体滚行部;移动体,其具有与所述轨道构件的所述滚动体滚行部对置的负载滚动体滚行部、与由所述滚动体滚行部和所述负载滚动体滚行部形成的负载路平行的返回路以及与所述负载路和所述返回路连接的方向转换路;多个滚动体,它们配置于所述负载路、所述返回路以及所述方向转换路;以及保持器,其对所述多个滚动体中的至少一个进行保持,在所述负载路、所述返回路以及所述方向转换路形成有供所述保持器的宽度方向的端部进入的槽,所述方向转换路的至少一部分和/或所述返回路的至少
一部分中的所述槽的宽度比所述负载路的至少一部分中的所述槽的宽度宽。
13.发明效果
14.根据本发明,由于在负载路设置供保持器的宽度方向的端部进入的槽,因此能够防止在从轨道构件卸下移动体时保持器的脱落。另外,在方向转换路的至少一部分和/或返回路的至少一部分中,能够减轻保持器与槽的壁面的接触,因此能够减轻保持器循环时的阻力的变动。
附图说明
15.图1是本发明的一个实施方式的运动引导装置的外观立体图。
16.图2是图1的ii
‑
ii线剖视图。
17.图3是沿着本实施方式的无限循环路的剖视图(图3的(a)是组装有保持器和滚柱的状态,图3的(b)是卸下了保持器和滚柱的状态)。
18.图4是本实施方式的保持器的立体图。
19.图5是本实施方式的无限循环路的详细图(图5的(a)是沿着无限循环路的剖视图,图5的(b)~图5的(e)分别是图5的(a)的b
‑
b线~e
‑
e线剖视图)。
20.图6是无限循环路的另一例的剖视图(图6的(a)是组装有保持器和滚柱的状态,图6的(b)是卸下了保持器和滚柱的状态)。
21.图7是示出本实施方式的循环部件的一例的外观立体图(图7的(a)是从方向转换路结构部侧观察到的循环部件的立体图,图7的(b)是从返回路结构部侧观察到的循环部件的立体图)。
22.图8是组装于移动体主体的状态的循环部件的立体图。
23.图9是组装于盖构件的状态的循环部件的立体图。
24.图10是插入于移动体主体的一对贯通孔的一对循环部件的示意图(图10的(a)是插入中的状态,图10的(b)是插入后的状态)。
具体实施方式
25.以下,基于附图对本发明的实施方式的运动引导装置进行说明。但是,本发明的运动引导装置能够以各种形态具体化,并不限定于本说明书所记载的实施方式。本实施方式是以通过使说明书的公开充分而使本领域技术人员能够充分理解发明的范围的目的被提供的。
26.图1示出本发明的一个实施方式的运动引导装置的外观立体图,图2示出图1的ii
‑
ii线剖视图,图3示出沿着无限循环路的剖视图。需要说明的是,以下,为了方便说明,将运动引导装置1配置在水平面,且使用正面观察运动引导装置1时的方向、即图1的上下、左右、前后来对运动引导装置1的结构进行说明。当然,运动引导装置1的配置并不限于此。
27.如图1所示,运动引导装置1具备作为轨道构件的导轨2、以及移动体3。导轨2沿着移动体3所移动的前后方向呈直线延伸。移动体3能够沿着导轨2的长度方向呈直线移动。导轨2安装于未图示的例如基座等。在导轨2的上表面形成有用于将导轨2安装于基座的螺栓的通孔2a。
28.如图2所示,移动体3在剖视观察时呈倒u字状,且以跨越导轨2的方式组装。移动体
3安装于未图示的例如工作台等可动体。在移动体3的上表面形成有用于安装可动体的未图示的螺纹孔。
29.需要说明的是,移动体3相对于导轨2的移动是相对的,导轨2也可以移动。另外,导轨2也可以弯曲,以使移动体3呈曲线移动。
30.如图1所示,在导轨2形成有作为滚动体滚行部的滚柱滚行面4、5。滚柱滚行面4、5沿着导轨2的长度方向延伸。作为滚动体的滚柱在滚柱滚行面4、5上滚行。在该实施方式中,在导轨2的左右的侧面各自形成有两条滚柱滚行面4、5。
31.如图2所示,在上侧的滚柱滚行面4滚动的滚柱6的接触角α相对于水平方向设定为例如45
°
。在下侧的滚柱滚行面5滚动的滚柱6的接触角β相对于水平方向设定为例如45
°
。滚柱滚行面4、5的条数、配置、滚柱6的接触角α、β为一例,可以根据作用于运动引导装置1的径向载荷、反径向载荷、横向载荷来适当设定。8是侧密封,9是上部密封。
32.如图1所示,移动体3具备金属制的移动体主体11、安装于移动体主体11的移动方向的两端面的一对盖构件12以及组装于移动体主体11和盖构件12的循环部件13(参照图7,详细情况如后述)。
33.如图2所示,在移动体主体11形成有与导轨2的滚柱滚行面4、5对置的负载滚柱滚行面14、15。移动体主体11在剖视观察时呈倒u字状,且具备与导轨2的上表面对置的中央部11a以及左右一对袖部11b。在左右一对袖部11b各自形成有两条负载滚柱滚行面14、15。在导轨2的滚柱滚行面4、5与移动体主体11的负载滚柱滚行面14、15之间形成有作为负载路的负载滚柱滚行路a。在负载滚柱滚行路a中,滚柱6一边负载载荷一边在滚柱滚行面4、5与负载滚柱滚行面14、15之间滚动。
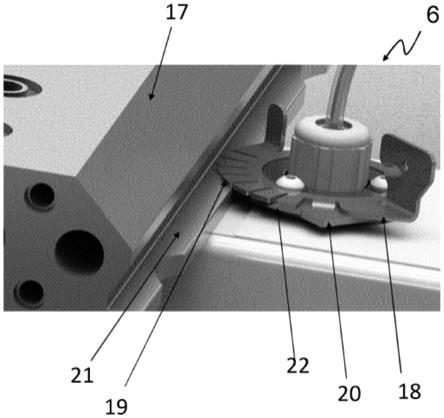
34.在移动体主体11的袖部11b的内侧面设置有保持保持器21的保持部17a、17b、17c。保持部17a、17b、17c具备上保持部17a、中保持部17b以及下保持部17c。保持部17a、17b、17c为树脂制,一体地形成于移动体主体11或者组装于移动体主体11。
35.在保持部17a、17b、17c形成有供保持器21的宽度方向的端部进入的槽18。槽18分别形成于上保持部17a、中保持部17b以及下保持部17c。槽18在从导轨2卸下移动体3时防止保持器21从移动体3脱落。滚柱6被保持于保持器21。通过保持保持器21,能够防止滚柱6也从移动体3脱落。需要说明的是,也可以以环抱滚柱6的方式形成保持部17a、17b、17c,从而通过保持部17a、17b、17c来防止滚柱6的脱落。
36.在移动体主体11,与负载滚柱滚行路a平行地形成有返回路b。返回路b一对一地与负载滚柱滚行路a对应。在移动体主体11,与负载滚柱滚行路a平行地形成有贯通孔19。返回路b形成在插入于贯通孔19的循环部件13。返回路b形成得比滚柱6稍大。滚柱6一边被后续的滚柱6推压、或者一边被保持器21拉拽,一边在返回路b移动。
37.在返回路b形成有供保持器21的宽度方向的端部22进入的槽26。即使从导轨2卸下移动体3,返回路b内的滚柱6也不会从移动体3脱落。返回路b的槽26是为了避免与保持器21的端部22的干涉而设置的。
38.下侧的负载滚柱滚行路a以及上侧的返回路b与方向转换路c1(参照图3)连接。方向转换路c1形成于循环部件13。上侧的负载滚柱滚行路a以及下侧的返回路b与方向转换路c2(参照图9)连接。方向转换路c2形成在盖构件12与循环部件13之间。方向转换路c1与方向转换路c2立体交叉(详细情况如后述)。
39.图3示出沿着无限循环路的剖视图。图3的(a)示出组装有保持器21和滚柱6的状态,图3的(b)示出卸下了保持器21和滚柱6的状态。如图3的(a)所示,负载滚柱滚行路a和返回路b呈直线状,且相互平行。与负载滚柱滚行路a的一端部以及返回路b的一端部连接的方向转换路c1呈u字状。在未图示的负载滚柱滚行路a的另一端部和返回路b的另一端部也连接有方向转换路c1。由负载滚柱滚行路a、返回路b、一对方向转换路c1构成跑道状的无限循环路。
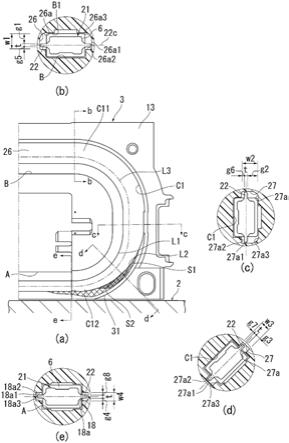
40.如图3的(a)、(b)所示,在方向转换路c1形成有供保持器21的宽度方向的端部进入的槽27。在图3的(a)中,用虚线l1表示槽27的内周侧的壁面,用虚线l2表示槽27的外周侧的壁面。同样地,在图3的(b)中,用实线l1表示槽27的内周侧的壁面,用实线l2表示槽27的外周侧的壁面。图3的(b)的单点划线l3是保持器21的宽度方向的端部22(以下称为带(band)22)的中心线。
41.图4示出保持器21的立体图。保持器21具备夹设于滚柱6之间的多个间隔件23以及连结多个间隔件23的一对带22。间隔件23是为了防止滚柱6彼此的接触而设置的。在间隔件23形成有使形状与滚柱6的外周面匹配的曲面状凹部23a。间隔件23通过一对带22连结。一对带22配置于滚柱6的两端面。带22构成保持器21的宽度方向的端部。
42.图5示出无限循环路的详细图。如图5的(b)所示,在返回路b形成有供保持器21的带22进入的槽26。槽26具备:底部26a1,其与带22的宽度方向的端面对置;内周侧的壁部26a2,其与带22的内周侧的侧面对置;以及外周侧的壁部26a3,其与带22的外周侧的侧面对置。底部26a1与壁部26a2、26a3大致呈直角。将外周侧的壁部26a3与底部26a1的交叉部形成为圆弧形状是为了确保返回路结构部32(参照图7)的壁厚。如图5的(c)、(d)所示,在方向转换路c1形成有供保持器21的带22进入的槽27。槽27与槽26同样地具备底部27a1、内周侧的壁部27a2以及外周侧的壁部27a3。如图5的(e)所示,在负载滚柱滚行路a形成有供保持器21的带22进入的槽18。槽18与槽27同样地具备底部18a1、内周侧的壁部18a2以及外周侧的壁部18a3。底部18a1与壁部18a2、18a3呈直角。
43.返回路b中的槽26的宽度w1(参照图5的(b))比负载滚柱滚行路a中的槽18的宽度w4(参照图5的(e))宽。返回路b中的从带22到与带22对置的槽26的外周侧的壁面26a(26a3)为止的间隙g1(参照图5的(b))也比负载滚柱滚行路a中的从带22到与带22对置的槽18的外周侧的壁面18a为止的间隙g4(参照图5的(e))大。
44.如图5的(b)所示,返回路b中的间隙g1比返回路b中的从带22到与带22对置的槽26的内周侧的壁面26a2为止的间隙g5大。t为带22的厚度。带22的中心线22c与滚柱6的中心线大致相同,但也可以在图5的(b)的上下方向上偏移。返回路b中的槽26的外周侧的壁面26a和与滚柱6的外周对置的返回路b的壁面b1距带22的中心线22c处于相同距离。返回路b中的槽26的宽度w1在返回路b的全长上实质上为恒定。负载滚柱滚行路a中的槽18的宽度w4也在负载滚柱滚行路a的全长上实质上为恒定。
45.方向转换路c1的返回路b侧的端部c11的截面形状与图5的(b)所示的返回路b的截面形状大致相同。方向转换路c1的返回路b侧的端部c11处的槽27与返回路b中的槽26连续地相连。即,在槽27与槽26的接缝不产生高低差。
46.方向转换路c1的负载滚柱滚行路a侧的端部c12的截面形状与图5的(e)所示的负载滚柱滚行路a的截面形状大致相同。方向转换路c1的负载滚柱滚行路a侧的端部c12处的
槽27与负载滚柱滚行路a中的槽18连续地相连。即,在槽27与槽18的接缝不产生高低差。
47.方向转换路c1的返回路b侧的端部c11处的槽27的宽度w1(参照图5的(b))比方向转换路c1的负载滚柱滚行路a侧的端部c12处的槽27的宽度w4(参照图5的(e))宽。更详细而言,如图5的(c)所示,方向转换路c1的槽27的宽度w1、w2在方向转换路c1的返回路b侧的一半处(从b
‑
b线到c
‑
c线为止的区域)大致相同。即,方向转换路c1的c
‑
c线剖面中的从带22到与带22对置的槽27的外周侧的壁面27a(27a3)为止的间隙g2与间隙g1(参照图5的(b))大致相同。同样地,从带22到与带22对置的槽27的内周侧的壁面27a2为止的间隙g6(参照图5的(c))与间隙g5(参照图5的(b))大致相同。
48.如图5的(c)、(d)所示,方向转换路c1的槽27的宽度w2、w3在方向转换路c1的负载滚柱滚行路a侧的一半处(从c
‑
c线到e
‑
e线为止的区域),朝向负载滚柱滚行路a逐渐变窄。如图5的(d)、(e)所示,方向转换路c1中的从带22到与带22对置的槽27的外周侧的壁面27a为止的间隙也朝向负载滚柱滚行路a逐渐变窄。即,如图5的(d)所示,方向转换路c1的d
‑
d线剖面中的从带22到与带22对置的槽27的外周侧的壁面27a(27a3)为止的间隙g3比间隙g2(参照图5的(c))小,且比间隙g4(参照图5的(e))大。另一方面,从带22到与带22对置的槽27的内周侧的壁面27a2为止的间隙g7与间隙g6(参照图5的(c))大致相同。
49.如图5的(e)所示,负载滚柱滚行路a中的槽18的宽度w4比方向转换路c1中的槽27的宽度w3(参照图5的(d))小。负载滚柱滚行路a中的从带22到与带22对置的槽18的外周侧的壁面18a(18a3)为止的间隙g4比间隙g3(参照图5的(d))小。另一方面,从带22到与带22对置的槽18的内周侧的壁面18a2为止的间隙g8与间隙g7(参照图5的(d))大致相同。
50.以上,对本实施方式的运动引导装置1的结构进行了说明。根据本实施方式的运动引导装置1,对以下的效果进行说明。如图2、图5的(e)所示,由于在负载滚柱滚行路a设置供保持器21的带22进入的槽18,因此,能够防止在从导轨2卸下移动体3时保持器21脱落。
51.如图3的(a)所示,在保持器21从直线状的返回路b进入u字状的方向转换路c1时,保持器21仿照滚柱6列的弯曲而弯曲。但是,保持器21的带22的前端部具有保持直线状的倾向。因此,在保持器21从返回路b进入方向转换路c1时,保持器21的带22的前端部有可能与方向转换路c1接触。相反,在保持器21从方向转换路c1进入返回路b时,保持器21的带22的前端部有可能与返回路b的端部接触。
52.但是,如图5所示,根据本实施方式的运动引导装置1,返回路b和方向转换路c1的返回路b侧的端部c11处的槽26、27的宽度w1、w2比负载滚柱滚行路a中的槽18的宽度w4宽,返回路b和方向转换路c1的返回路b侧的端部c11处的槽26、27的外周侧的壁面26a、27a远离保持器21的带22。因此,能够防止保持器21的带22与槽26、27的壁面26a、27a接触。
53.另外,方向转换路c1的负载滚柱滚行路a侧的端部c12处的槽27的宽度w4(参照图5的(e))比方向转换路c1的返回路b侧的端部c11处的槽27的宽度w1(参照图5的(b))窄。因此,能够使方向转换路c1的负载滚柱滚行路a侧的端部c12处的槽27具有铲起保持器21的功能。通过使槽27具有铲起保持器21的功能,能够减轻铲起滚柱6的循环部件13的唇部31的磨损。
54.需要说明的是,在保持器21从负载滚柱滚行路a进入方向转换路c1时,在图5的(a)的s1所示的区域(细阴影线的区域),保持器21的带22的前端部有可能与方向转换路c1的槽27的外周侧的壁面27a接触。另外,在保持器21从方向转换路c1进入负载滚柱滚行路a时,在
图5的(a)的s2所示的区域(粗阴影线的区域),保持器21的带22的前端部有可能与方向转换路c1、负载滚柱滚行路a的槽27、18的外周侧的壁面27a、18a接触。但是,该区域s1、s2相对于方向转换路c1相对地小,且保持器21的带22的前端部与壁面27a、18a的接触也较弱。因此,在区域s1、s2的接触不会对保持器21循环时的阻力产生较大的影响。
55.方向转换路c1的返回路b侧的端部c11处的槽27与返回路b中的槽26连续地相连,方向转换路c1的负载滚柱滚行路a侧的端部c12处的槽27与负载滚柱滚行路a中的槽18连续地相连,因此保持器21在返回路b、方向转换路c1、负载滚柱滚行路a的接缝顺畅地循环。
56.由于将滚柱6用于滚动体,因此能够大致恒定地保持无限循环路中的滚柱6的姿态。由于能够经由滚柱6大致恒定地保持保持器21的姿态,因此能够进一步防止保持器21与槽18、26、27的接触。
57.图6的(a)、(b)示出无限循环路的另一例。在该例子中,与上述实施方式同样地,返回路b中的槽26的宽度比负载滚柱滚行路a中的槽18的宽度宽。返回路b中的槽26的宽度在返回路b的全长范围内实质上是恒定的。负载滚柱滚行路a中的槽18的宽度在负载滚柱滚行路a的全长范围内实质上是恒定的。需要说明的是,负载滚柱滚行路a中的槽18的宽度也可以在方向转换路c1侧的端部随着接近方向转换路c1而逐渐变宽。
58.与上述实施方式不同,方向转换路c1中的槽27的宽度在方向转换路c1的全长范围内实质上是恒定的。方向转换路c1中的槽27的宽度与返回路b中的槽26的宽度相等,且比负载滚柱滚行路a中的槽18的宽度宽。图6的(a)的虚线l1示出方向转换路c1中的槽27的内周侧的壁面,实线l2示出方向转换路c1中的槽27的外周侧的壁面。
59.根据该例子,能够大致消除保持器21的带22的前端部与负载滚柱滚行路a、返回路b及方向转换路c1的接触。
60.图7的(a)、(b)示出组装于移动体主体11的循环部件13的一例。该循环部件13具备:筒状的返回路结构部32,其形成有返回路b;以及方向转换路结构部33,其设置于返回路结构部32的一端部。在方向转换路结构部33形成有立体交叉的内周侧的方向转换路c1,并且形成有外周侧的方向转换路c2的内周侧。
61.图8示出将循环部件13组装于移动体主体11的状态。若将循环部件13组装于移动体主体11,则立体交叉的内周侧的方向转换路c1与负载滚柱滚行面15连接,并且立体交叉的外周侧的方向转换路c2的内周侧与负载滚柱滚行面14连接。
62.图9示出将循环部件13组装于盖构件12的状态。在盖构件12形成有立体交叉的外周侧的方向转换路c2的内周侧。若将循环部件13组装于盖构件12,则形成有立体交叉的外周侧的方向转换路c2。与方向转换路c2相连的返回路b形成于图10所示的循环部件34。
63.如图10所示,循环部件13和循环部件34从彼此相反方向向移动体主体11的一对贯通孔19插入。如上所述,在循环部件13形成有立体交叉的内周侧的方向转换路c1、立体交叉的外周侧的方向转换路c2的内周侧以及与内周侧的方向转换路c1相连的返回路b。在循环部件34形成有立体交叉的内周侧的方向转换路c1、立体交叉的外周侧的方向转换路c2的内周侧以及与外周侧的方向转换路c2相连的返回路b。在盖构件12形成有立体交叉的外周侧的方向转换路c2的外周侧(参照图9)。若将循环部件13、34、盖构件12组装于移动体主体11,则形成有立体交叉的两个方向转换路c1、c2。
64.图7至图10所示的循环部件13、34、盖构件12的结构是一例。可以将循环部件13、34
的返回路结构部32和方向转换路结构部33设为分体,也可以在方向转换路结构部33形成立体交叉的两个方向转换路c1、c2的内周侧且在盖构件12形成立体交叉的两个方向转换路c1、c2的外周侧。另外,也可以不使两个方向转换路c1、c2立体交叉。
65.需要说明的是,本发明不限定于具体化为上述实施方式,能够在不变更本发明的主旨的范围内具体化为其他实施方式。
66.例如,在上述实施方式中,一个保持器一连串地保持多个滚柱,但既可以是一个保持器保持一个滚柱,也可以是一个保持器保持两个、三个等两个以上的滚柱。
67.在上述实施方式中,对使用滚柱作为滚动体的情况进行了说明,但也可以使用滚珠作为滚动体。
68.本说明书基于2019年4月8日申请的日本特愿2019
‑
073276。其内容全部包含于此。
69.附图标记说明:
70.1...运动引导装置,2...导轨(轨道构件),3...移动体,4、5...滚柱滚行面(滚动体滚行部),6...滚柱(滚动体),14、15...负载滚柱滚行面(负载滚动体滚行部),21...保持器,22...保持器的带(保持器的宽度方向的端部),18...负载路中的槽,26...返回路中的槽,27...方向转换路中的槽,a...负载滚柱滚行路(负载路),b...返回路,c1、c2...方向转换路,w1...返回路中的槽的宽度、方向转换路的返回路侧的端部处的槽的宽度,w4...负载路中的槽的宽度、方向转换路的负载路侧的端部处的槽的宽度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。