基于自回归bigru的核电旋转机械状态监测方法
技术领域
1.本发明涉及核电旋转机械状态监测技术领域,尤其涉及一种基于自回归bigru的核电旋转机械状态监测方法。
背景技术:
2.在核电厂中,核电旋转机械如核主泵、汽轮机、主给水泵、循环水泵、发电机、循环风机等作为运行关键核电旋转机械设备被广泛应用,不仅结构复杂、体积庞大,且功率高、功能关键,一旦发生故障便可能影响核电正常运行,甚至造成严重安全事故。为此,有效监测核电旋转机械的运行状态,保持核电旋转机械健康、高效地长期稳定运行,减少核电系统非预期故障,从而最大程度地降低旋转机械故障所造成的损失和事故显得尤为迫切和重要。
3.随着智能传感与信息技术的发展,核电旋转机械状态监测进入“大数据”时代,但从核电旋转机械设备大数据中挖掘有价值信息,高效、准确地识别并捕捉核电旋转机械的运行异常,仍然是核电旋转机械状态监测领域的难题。
4.目前,对核电旋转机械大数据的信息挖掘并应用于核电旋转机械设备运行状态监测方法相对简单,主要为以下2种方法:1、通过监测某单一类型运行参数监测核电旋转机械设备运行状态,并给定一固定阈值,当核电旋转机械设备运行参数达到该阈值则报警的方法对核电旋转机械设备运行状态进行监测;2、构建核电旋转机械设备的正常运行状态多维参数矩阵,根据样本值与多维矩阵间的相似性确定核电旋转机械设备当前的健康状态。
5.上述2种方法存在以下不足:
6.1、基于单一类型运行参数监测核电旋转机械设备运行状态,并采用固定阈值报警易出现误报、漏报;
7.2、采用固定阈值识别核电旋转机械设备运行异常点,往往发现异常时核电旋转机械设备已经损坏,影响正常生产。
8.3、核电旋转机械核电旋转机械设备性能的改变多由一段时间累积作用引起,且不同子系统或子部件间存在关联耦合和相互交叉作用,固定阈值报警与多维参数矩阵忽略了核电旋转机械设备多系统运行之间存在空间关联性与运行参数的时序关联性。
技术实现要素:
9.本发明主要解决原有的核电旋转机械状态监测方法忽略了核电旋转机械设备多维运行参数间的空间与时序关联性、无法及时上报故障报警且易出现故障报警的误报和漏报的技术问题;提供基于自回归bigru的核电旋转机械状态监测方法,能够综合考虑核电旋转机械多维运行参数间的空间与时序关联性,在故障发生的早期给出定量评估,指导工程师对核电旋转机械核电旋转机械设备有计划地停产维修,不影响正常的生产。
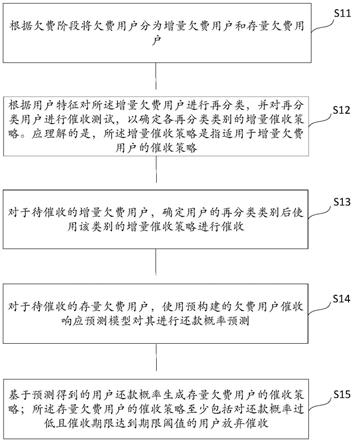
10.本发明的上述技术问题主要是通过下述技术方案得以解决的:本发明包括以下步骤:
11.s1、获取核电旋转机械设备运行的历史监测数据,对历史监测数据进行预处理,将预处理后的历史监测数据分成训练集和测试集;
12.s2、构建自回归bigru(双向门控神经单元)网络模型,对自回归bigru网络模型进行训练和测试,输出训练好的自回归bigru网络模型;
13.s3、获取核电旋转机械设备正常工况下的运行参数估计值,计算核电旋转机械设备正常工况下的运行参数与运行参数估计值的残差,确定核电旋转机械设备正常工况下的运行参数残差阈值范围;
14.s4、获取核电旋转机械设备当前的实测运行数据,并输入至训练好的自回归bigru网络模型中,获取核电旋转机械设备当前的实测运行数据估计值;
15.s5、计算核电旋转机械设备当前的实测运行数据与实测运行数据估计值的残差,得到实测残差,并将实测残差与步骤s3中获取的残差阈值范围进行比较,若实测残差不属于残差阈值范围,则输出核电旋转机械设备故障报警。
16.通过构建bigru网络模型综合考虑核电旋转机械设备运行参数间的空间关联性与时序关联性,使得生成的报警阈值更加符合核电旋转机械设备运行实际情况,在核电旋转机械设备故障早期生成动态报警阈值,给出定量评估,指导工程师对核电旋转机械设备有计划地停产维修,不影响正常的生产。
17.训练自回归bigru网络模型时,由于模型是经正常运行参数训练得到,因此当输入无故障运行参数时,模型的输出参数与输入参数内部相似度较高,最终残差较小;随输入参数故障程度增加,模型的输出参数与输入参数内部相似度较低,最终残差较大,为此模型可生成动态报警阈值,报警阈值根据输入状态动态改变,避免了报警的误报、漏报。
18.作为优选,所述的步骤s1具体包括:
19.s11、获取核电旋转机械设备运行的历史监测数据,将历史监测数据按时间戳进行合并,形成以时间戳为行索引、以历史监测数据的种类为列索引的械核电旋转机械设备运行历史监测数据表格;
20.s12、绘制核电旋转机械设备运行历史监测数据表格中每一列历史监测数据的箱型图,以箱型图的上、下边缘为界限,若该列中的历史监测数据大于上边界或小于下边界,则将该历史监测数据所在行的整行数据从核电旋转机械设备运行历史监测数据表格中剔除;
21.s13、对核电旋转机械设备运行历史监测数据表格中剩余的历史监测数据进行归一化处理,构建无故障数据且经归一化处理的历史监测数据状态矩阵,所述无故障数据且经归一化处理的历史监测数据状态矩阵为:
[0022][0023]
其中,m为历史监测数据的种类,n为每一类历史监测数据所包含的参数个数,x
0b
(t)=[x1(t) x2(t)
ꢀ…ꢀ
x
m
(t)]
t
构成当前t时刻所对应的一条监测数据;
[0024]
s14、将历史监测数据状态矩阵按照设定的比例划分成训练集和测试集。
[0025]
设备包含多个测点,由于网络模型善于处理时序数据的特点,故将同一测点下的
数据与时间之间严格相关联;将多个测点之间以相同的时间戳为索引,并行排列,当前t时刻所对应的一条监测数据增加了设备间的耦合关联性;步骤s12使得输入矩阵数据都为设备正常运行时的状态数据,通过自动识别出数据中的异常值,避免手动计算剔除,加快了数据处理速度。
[0026]
作为优选,所述的步骤s13中,对核电旋转机械设备运行历史监测数据表格中剩余的历史监测数据采用z
‑
score标准化方法进行归一化处理。
[0027]
对核电旋转机械设备运行历史监测数据表格中剩余的历史监测数据采用z
‑
score标准化方法进行归一化处理可降低数据计算的复杂度,使数据分布更加平均,避免极值过大对网络模型产生影响。
[0028]
作为优选,所述的所述步骤s14中,将历史监测数据状态矩阵按照设定的比例划分成训练集和测试集时,按照历史监测数据状态矩阵的时间顺序进行划分。
[0029]
划分时考虑历史监测数据的时序性,按历史监测数据状态矩阵的时间顺序进行划分,不打乱历史监测数据状态矩阵的时序性。
[0030]
作为优选,所述的自回归bigru网络模型包括输入层、映射层、压缩层、解映射层和输出层,其中:
[0031]
输入层为双向gru神经单元,用于获取核电旋转机械设备运行数据间的时空关联性;
[0032]
映射层、压缩层为普通神经网络单元,用于将双向gru单元的输出向量压缩至低维特征空间,并提取双向gru单元的输出向量的非线性主元;
[0033]
解映射层为普通神经单元,用于解析被压缩的输入信息;
[0034]
输出层为双向gru神经单元,用于重构输入的核电旋转机械设备运行数据;
[0035]
压缩层中普通神经网络单元的个数小于映射层和解映射层中普通神经网络单元的个数,输入层与输出层采用线性激活函数,其他隐藏层节点采用非线性激活函数。
[0036]
作为优选,所述的双向gru神经单元包括更新门与重置门,所述更新门用于控制前一时刻的状态信息被带入到当前状态信息中的程度,所述重置门用于控制忽略前一时刻的状态信息程度:
[0037]
z
t
=σ(w
z
·
[h
t
‑1,x
t
])
[0038]
r
t
=σ(w
r
·
[h
t
‑1,x
t
])
[0039][0040][0041]
其中,z
t
表示控制更新的门控,r
t
表示控制重置的门控,表示当前神经单元的候选输出值,h
t
表示当前神经元的输出值,h
t
‑1表示前一神经元的输出,x
t
表示当前神经元的输入,w
z
表示更新门权重,w
r
表示重置门的权重,w表示输出状态的权重,σ表示sigmoid函数,tanh表示双曲正切函数。
[0042]
z
t
越大,之前时刻隐藏节点提供的信息越多;当r
t
接近0时,表示忽略之前隐藏节点的信息,只将当前时刻的输入作为输入,此机制可以使模型丢弃前一个神经元的一些无用信息。
[0043]
作为优选,所述的步骤s2中,对自回归bigru网络模型进行训练和测试,当损失函
数最小时输出训练好的自回归bigru网络模型,所述损失函数为:
[0044][0045]
其中,x'为自回归bigru网络模型输出向量,x为自回归bigru网络模型输入出量。
[0046]
作为优选,所述的步骤s2中,自回归bigru网络模型在训练过程中,自回归bigru网络模型的输入数据集与输出标签集相同,并采用droupout方法随机丢弃部分神经元。
[0047]
自回归bigru网络模型的输入数据集与输出标签集相同,使模型训练学习数据之间的相关性;采用droupout方法随机丢弃部分神经元,增加模型的可靠性。
[0048]
作为优选,所述的步骤s3具体包括:
[0049]
s31、将训练集数据输入至训练好的自回归bigru网络模型中,得到核电旋转机械设备正常工况下各类运行参数的重构矩阵
[0050]
s32、计算历史监测数据状态矩阵与重构矩阵的残差,得到残差矩阵
[0051]
s33、计算残差矩阵每行残差的均值μ
m
和标准差σ
m
;
[0052]
s34、采用3σ准则设置核电旋转机械核电旋转机械设备正常工况下的运行参数残差阈值范围(μ
m
‑
3σ
m
,μ
m
3σ
m
)。
[0053]
当网络模型训练完成后,将经预处理后的训练集数据输入至模型,训练集数据都为设备正常工况时的运行参数,因此网络模型输出正常运行工况下的运行参数的估计值,即重构矩阵,以经过训练的网络模型来求解残差阈值范围,提高了残差阈值范围的准确性。
[0054]
作为优选,所述的步骤s5中通过设置相应的残差阈值范围和持续时长用于输出不同程度的核电旋转机械设备故障报警等级。
[0055]
本发明的有益效果是:
[0056]
1)训练自回归bigru网络模型时,由于模型是经正常运行参数训练得到,因此当输入无故障运行参数时,模型的输出参数与输入参数内部相似度较高,最终残差较小;随输入参数故障程度增加,模型的输出参数与输入参数内部相似度较低,最终残差较大,为此模型可生成动态报警阈值,报警阈值根据输入状态动态改变,避免了报警的误报、漏报;
[0057]
2)通过构建bigru网络模型综合考虑核电旋转机械设备运行参数间的空间关联性与时序关联性,使得生成的报警阈值更加符合核电旋转机械设备运行实际情况,在核电旋转机械设备故障早期生成动态报警阈值,给出定量评估,指导工程师对核电旋转机械设备有计划地停产维修。
附图说明
[0058]
图1是本发明方法的一种流程图。
[0059]
图2是本发明自回归bigru网络模型的一种结构示意图。
[0060]
图3是本发明双向gru神经单元的一种结构示意图。
[0061]
图4是本发明实施例中核电主给水泵的流量、电流、压差的估计值与残差曲线示意图,其中图(a)是核电主给水泵的流量、电流、压差的估计值与模型运行时间的曲线示意图,
图(b)是核电主给水泵的流量、电流、压差的残差与模型运行时间的曲线示意图。
具体实施方式
[0062]
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
[0063]
实施例:本实施例的基于自回归bigru的核电旋转机械状态监测方法,如图1所示,包括以下步骤:
[0064]
s1、获取核电旋转机械设备运行的历史监测数据,对历史监测数据进行预处理,将预处理后的历史监测数据分成训练集和测试集。
[0065]
步骤s1具体包括:
[0066]
s11、获取核电旋转机械设备运行的历史监测数据,将历史监测数据按时间戳进行合并,形成以时间戳为行索引、以历史监测数据的种类为列索引的核电旋转机械设备运行历史监测数据表格,历史监测数据的种类与实际设备相关,包含但不限于振动、转速、电流、电压、噪声、流量、压力、温度、湿度;
[0067]
s12、绘制核电旋转机械设备运行历史监测数据表格中每一列历史监测数据的箱型图,以箱型图的上、下边缘为界限,若该列中的历史监测数据大于上边界或小于下边界,则将该历史监测数据所在行的整行数据从核电旋转机械设备运行历史监测数据表格中剔除,使得输入矩阵数据都为设备正常运行时的状态数据,通过自动识别出数据中的异常值,避免手动计算剔除,加快了数据处理速度;
[0068]
s13、对核电旋转机械设备运行历史监测数据表格中剩余的历史监测数据采用z
‑
score标准化方法进行归一化处理,构建无故障数据且经归一化处理的历史监测数据状态矩阵,可降低数据计算的复杂度,使数据分布更加平均,避免极值过大对网络模型产生影响,z
‑
score标准化方法具体表现为:
[0069][0070]
其中,max为样本数据最大值,min为样本数据最小值;
[0071]
无故障数据且经归一化处理的历史监测数据状态矩阵为:
[0072][0073]
为m
×
n的数据矩阵,其中,m为历史监测数据的种类,n为每一类历史监测数据所包含的参数个数,x
0b
(t)=[x1(t) x2(t)
ꢀ…ꢀ
x
m
(t)]
t
构成当前t时刻所对应的一条监测数据;
[0074]
s14、将历史监测数据状态矩阵按照设定的7∶3比例划分成训练集和测试集,划分时考虑历史监测数据的时序性,按历史监测数据状态矩阵的时间顺序进行划分,不打乱历史监测数据状态矩阵的时序性。
[0075]
设备包含多个测点,由于网络模型善于处理时序数据的特点,故将同一测点下的数据与时间之间严格相关联;将多个测点之间以相同的时间戳为索引,并行排列,当前t时刻所对应的一条监测数据增加了设备间的耦合关联性。
[0076]
s2、构建自回归bigru网络模型,对自回归bigru网络模型进行训练和测试,输出训练好的自回归bigru网络模型。
[0077]
如图2所示,自回归bigru网络模型包括输入层(c1)、映射层(c2)、压缩层(c3)、解映射层(c4)和输出层(c5),图2中的横坐标为时间,纵坐标为核电旋转机械设备的运行监测数据,其中:
[0078]
输入层为双向gru神经单元,用于获取核电旋转机械设备运行数据间的时空关联性;
[0079]
映射层、压缩层为普通神经网络单元,用于将双向gru单元的输出向量压缩至低维特征空间,并提取双向gru单元的输出向量的非线性主元,避免输入层与输出层单元构成简单一对一关系;
[0080]
解映射层为普通神经单元,用于解析被压缩的输入信息;
[0081]
输出层为双向gru神经单元,用于重构输入的核电旋转机械设备运行数据;
[0082]
压缩层中普通神经网络单元的个数远小于映射层和解映射层中普通神经网络单元的个数,输入层与输出层采用线性激活函数f(x)=ax b,其中,a、b为系数项,其他隐藏层节点采用非线性激活函数
[0083]
如图3所示,双向gru神经单元包括更新门与重置门,更新门用于控制前一时刻的状态信息被带入到当前状态信息中的程度,重置门用于控制忽略前一时刻的状态信息程度:
[0084]
z
t
=σ(w
z
·
[h
t
‑1,x
t
])
[0085]
r
t
=σ(w
r
·
[h
t
‑1,x
t
])
[0086][0087][0088]
其中,z
t
表示控制更新的门控,r
t
表示控制重置的门控,表示当前神经单元的候选输出值,h
t
表示当前神经元的输出值,h
t
‑1表示前一神经元的输出,x
t
表示当前神经元的输入,w
z
表示更新门权重,w
r
表示重置门的权重,w表示输出状态的权重,σ表示sigmoid函数,tanh表示双曲正切函数。
[0089]
z
t
越大,之前时刻隐藏节点提供的信息越多;当r
t
接近0时,表示忽略之前隐藏节点的信息,只将当前时刻的输入作为输入,此机制可以使模型丢弃前一个神经元的一些无用信息。
[0090]
对自回归bigru网络模型进行训练和测试,当损失函数最小时输出训练好的自回归bigru网络模型,损失函数为:
[0091][0092]
其中,x'为自回归bigru网络模型输出向量,x为自回归bigru网络模型输入出量。
[0093]
自回归bigru网络模型在训练过程中,自回归bigru网络模型的输入数据集与输出标签集相同,使模型训练学习数据之间的相关性,并采用droupout方法随机丢弃部分神经
元,增加模型的可靠性。
[0094]
s3、获取核电旋转机械设备正常工况下的运行参数估计值,计算核电旋转机械设备正常工况下的运行参数与运行参数估计值的残差,确定核电旋转机械设备正常工况下的运行参数残差阈值范围。
[0095]
步骤s3具体包括:
[0096]
s31、将训练集数据输入至训练好的自回归bigru网络模型中,得到核电旋转机械设备正常工况下各类运行参数的重构矩阵
[0097]
s32、计算历史监测数据状态矩阵与重构矩阵的残差,得到残差矩阵
[0098]
s33、计算残差矩阵每行残差的均值μ
m
和标准差σ
m
;
[0099]
s34、采用统计学中3σ准则设置核电旋转机械设备正常工况下的运行参数残差阈值范围(μ
m
‑
3σ
m
,μ
m
3σ
m
)。
[0100]
当网络模型训练完成后,将经预处理后的训练集数据输入至模型,训练集数据都为设备正常工况时的运行参数,因此网络模型输出正常运行工况下的运行参数的估计值,即重构矩阵,以经过训练的网络模型来求解残差阈值范围,提高了残差阈值范围的准确性。
[0101]
s4、获取核电旋转机械设备当前的实测运行数据,并输入至训练好的自回归bigru网络模型中,获取核电旋转机械设备当前的实测运行数据估计值,具体过程与步骤s31相同。
[0102]
s5、计算核电旋转机械设备当前的实测运行数据与实测运行数据估计值的残差,得到实测残差,实测残差的获取过程与步骤s32相同,并将实测残差与步骤s3中获取的残差阈值范围进行比较,若实测残差不属于残差阈值范围,则输出核电旋转机械设备故障报警。
[0103]
在步骤s5的基础上,用户可自定义设置相应的残差阈值范围和持续时长用于输出不同程度的核电旋转机械设备故障报警等级。
[0104]
进一步地,用户可根据实际报警情况定期对模型进行更新,设备正常残差阈值将随之动态变化。
[0105]
核电旋转机械设备中主给水泵作为保证核岛安全运行的重要热工设备,其运行状态需要重点监测。以国内某ap1000核电堆型发电机组中主给水泵为对象,实际监测参数众多,现重点以其出口流量、运行电流、轴承温度、轴承垂直方向振动为例,采用本发明方法进行状态监测,以对所发明内容进行阐述,并进一步说明本发明内容的使用过程。
[0106]
根据数据记录情况,数据采集周期为30s,获取每个测点最近连续60天内的数据,每个测点约172000条数据。现实中可根据实际情况,尽可能地将数据范围扩大,以使其能涵盖设备运行过程中所有的正常运行参数。
[0107]
采用步骤s12对上述数据中的异常值进行剔除;采用z
‑
score标准化方法对数据进行归一化,得到无故障数据且经归一化处理的历史监测数据状态矩阵
[0108][0109]
将上述矩阵按约8:2比例分为训练集与测试集,即将前138000列作为训练集,后
34000列最为测试集。
[0110]
构建自回归bigru网络模型,如图2所示,对自回归bigru网络模型进行训练和测试,模型的输入数据与输出数据相同。其中输入层与输出层中双向gru神经单元设置为128个,映射层神经单元150个,压缩层神经单元10个,解映射层神经单元128个,输入层与输出层采用线性激活函数f(x)=2.3x 1.5,其他隐藏层节点采用非线性激活函数
[0111]
训练模型时的损失函数设置为:
[0112][0113]
更新批次大小128,迭代终止条件为迭代150次或损失函数连续15次不变。
[0114]
为防止模型过拟合,采用droupout策略随机丢弃部分神经元,增加模型的可靠性。
[0115]
将训练集数据输入至训练好的自回归bigru网络模型中,得到核电旋转机械设备正常工况下各类运行参数的重构矩阵
[0116][0117]
计算历史监测数据状态矩阵与重构矩阵的残差,得到残差矩阵
[0118][0119]
计算残差矩阵每行残差的均值μ
m
和标准差σ
m
;
[0120]
采用统计学中3σ准则设置核电旋转机械设备正常工况下的各运行参数正常残差阈值范围re_range为(μ
m
‑
3σ
m
,μ
m
3σ
m
),即
[0121]
re_range:
[0122]
获取设备当前的实测运行数据,并输入至训练好的自回归bigru网络模型中,获取设备当前的实测运行数据估计值。
[0123]
鉴于模型为自回归模型,即训练阶段输入输出为相同数据,且都为连续时间段设备正常运行状态下监测所得,因此,在模型通过不断地压缩重构后,其节点权值可较好拟合无故障数据的内部相关性。换句话说,若模型输入数据为设备运行正常状况下的监测数据,则模型输出的估计值可与输入值较为相似,则残差较小;若模型输入数据为设备运行异常状况下的监测数据,则模型输出的估计值与输入值存在较大差异,则残差较大。
[0124]
为此,计算当前各测点实测值与模型估计值的残差,若残差在正常工况残差阈值范围内,则可认为设备运行正常;相反,则可认为设备运行发生异常。
[0125]
用核电主给水泵轴承出现点蚀故障,轴承振动超固定报警阈值附近的连续10000个数据点验证模型,数据采样间隔为30s。
[0126]
如图4所示,图4(a)中的横坐标为时间,纵坐标为核电主给水泵的出口流量、运行电流、轴承温度、轴承垂直方向振动的运行监测数据,实线表示实测值,虚线表示模型输出的估计值,单点划线为固定阈值,双点划线为标记线;图4(a)中的四个坐标图由上到下依次为流量、电流、温度和振动;图4(b)中的横坐标为时间,纵坐标为残差值,圆点线表示正常残差阈值的界限,实线表示实测残差,双点划线为标记线,图4(b)中的四个坐标图依次为流量、电流、温度和振动的残差图。
[0127]
分析图4(a)可得,轴承振动幅值在第8000点附近超过固定阈值,产生报警,随后由于泵轴承的故障影响,泵流量下降,温度升高,超过固定报警阈值,但电流未出现异常;在轴承振动幅值超过固定阈值之前,轴承振动、轴承温度与泵出口流量都曾出现运行波动,单都未达到报警限值,不会产生报警。
[0128]
分析图4(b)可得,轴承振动残差在第2000点附近已超出正常残差范围,早于固定阈值报警点6000点,由采样间隔为30s可得,模型提前了约2.1天产生了主给水泵运行状态报警;模型对轴承温度与泵出口流量报警也分别提早了0.89天和1.74天。
[0129]
分析两图可得,若仅监测泵运行电流,则不会出现运行异常报警。
[0130]
鉴于核电旋转机械设备高安全性、高可靠性需求,本发明同时监测其多项运行参数,其中一项运行参数出现异常则需引起工程师对设备的格外注意。
[0131]
当自回归bigru网络模型输入的实测值为核电旋转机械设备正常运行参数时,模型输出的估计值与实测值拟合良好,实测残差位于残差阈值范围内;当输入的实测值故障程度增加时,模型输出的估计值无法与实测值良好拟合,实测残差随之偏离残差阈值范围,则设备运行发生异常。
[0132]
本发明通过构建bigru网络模型综合考虑核电旋转机械设备运行参数间的空间关联性与时序关联性,使得生成的报警阈值更加符合核电旋转机械设备运行实际情况,在核电旋转机械设备故障早期生成动态报警阈值,给出定量评估,指导工程师对核电旋转机械设备有计划地停产维修。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。