1.本发明涉及及陀螺仪技术领域,具体涉及一种基于离子阱芯片的陀螺仪及其转动测量方法。
背景技术:
2.陀螺仪是一种测量或保持方向和角速度的装置,旋转角度或角速率的测量可随时间积分,以确定陀螺仪转动角度方向的变化,有诸如惯性导航、惯性测量单元、平台稳定、地面车辆姿态控制系统、钻探测量、船舶、航空航天等应用。目前,用于高精度惯性导航的陀螺仪主要是光学陀螺仪和原子陀螺仪,其原理是利用干涉环路中由转动引起的萨格纳克(sagnac)效应所造成干涉条纹的相位移动来测量转动速度:
[0003][0004]
其中,a为干涉环路包围的面积,ω为转动的角速度,e为粒子的能量。
[0005]
光学陀螺仪易于实现小型化和实用化,它的不足和缺点主要是测量灵敏度不高;而原子的能量比光子大,在相同干涉环路面积下,原子陀螺仪的相位要远大于光学陀螺仪,因此原子陀螺仪的分辨率和灵敏度相对更高。目前,在国际上实现的此类原子陀螺仪主要有两种
‑
一热原子束陀螺仪和冷原子陀螺仪,其测量精度比其它类型陀螺仪均高出几个数量级,但其不足是整个系统往往很庞大,阻碍了这类陀螺仪在对尺寸要求较高的许多特定惯性测量单元和平台中的应用。
技术实现要素:
[0006]
本发明的目的在于克服上述背景技术所存在的至少一技术问题,提供一种基于离子阱芯片的陀螺仪及其转动测量方法。
[0007]
为实现上述目的,本发明的技术方案是:
[0008]
第一方面,本发明实施例提供了基于离子阱芯片的陀螺仪,包括:
[0009]
真空腔体,其设置有若干观察窗,以用于输入激光以及荧光信号探测;
[0010]
离子泵,其和真空腔体相连接,以维持真空腔体内的真空度;
[0011]
钙炉,其用于喷射出钙原子;
[0012]
微型表面电极离子阱,其位于所述真空腔体内,用于产生三维囚禁势阱,将原子炉喷射出的钙原子,通过光电离方式产生
40
ca
离子装载到该囚禁势阱中。
[0013]
进一步地,所述微型表面电极离子阱包括一中心直流电极、一环形射频电极以及若干对直流控制电极。
[0014]
进一步地,所述直流控制电极设置有七对,其中有两对帽极和一对中心补偿电极。
[0015]
进一步地,所述真空腔体设置有一电极引线法兰;所述微型表面电极离子阱安装在一管座上,微型表面电极离子阱的电极与管座的电极相连接,管座的引脚插在pcb插槽上,该pcb插槽固定在固定板上,在固定板边缘固定钙炉,固定板固定在电极引线法兰上,
pcb插槽与电极引线法兰上的电极相连接。
[0016]
进一步地,所述真空腔体设置有电压源连接法兰,用于与外部射频电压源连接。
[0017]
进一步地,所述真空腔体设置有六个cf35石英观察窗、一cf100石英观察窗;所述cf100石英观察窗6用于荧光信号探测,一cf35石英观察窗用于729nm激光输入,一cf35石英观察窗用于输入激光冷却所需的圆偏振397nm激光,一cf35石英观察窗用于输入866nm激光以及激光冷却所需的线偏振397nm激光。
[0018]
进一步地,所述管座为陶瓷管座,微型表面电极离子阱通过真空胶粘个陶瓷管座上。
[0019]
进一步地,所述离子泵维持真空腔体内的真空度在10
‑9pa。
[0020]
进一步地,所述固定板通过固定杆固定在电极引线法兰上。
[0021]
第二方面,本发明实施例提供了一种测量转动的激光脉冲的方法,基于上述的基于离子阱芯片的陀螺仪,所述方法包括:
[0022]
步骤1:利用离子泵将真空腔体维持在10
‑9pa超高真空环境,在微型表面电极离子阱的15个直流电极与射频电极上分别加15个独立稳定的直流电压与1个射频高压,并在与一相对的两cf35石英观察窗相连的方向上施加均匀磁场,使微型表面电极离子阱的电极表面产生三维囚禁势阱,将原子炉喷射出的钙原子,通过光电离方式产生
40
ca
离子装载到该囚禁势阱中;
[0023]
步骤2:从cf35石英观察窗4通入397nmπ光和866nm激光2000μs对离子进行多普勒冷却后关闭397nmπ光,从一cf35石英观察窗输入σ
偏振的397nm激光20μs后,从一cf35石英观察窗输入π偏振的397nm激光1000μs,将离子冷却至运动基态后关闭π偏振的397nm激光,再过50μs后关闭σ
偏振的397nm激光与866nm激光,此时将离子制备到|g>态;
[0024]
步骤3:从一cf35石英观察窗输入红失谐、共振的729nm激光,从一cf35石英观察窗输入蓝失谐的729nm激光,在两个幺正操作脉冲组u1之间,同时激发离子红、蓝边带跃迁20ms后关闭729nm激光;
[0025]
步骤4:改变微型表面电极离子阱两对帽极上的电压,将离子沿着z方向移动15μm距离,经过40ms的自由振荡后将让两对帽极上的电压恢复到初始电压,离子恢复到初始位置;
[0026]
步骤5:在两个幺正操作脉冲组u2之间,同时激发离子红、蓝边带跃迁20ms后关闭729nm激光后,关闭729nm激光使离子波包停止转动;
[0027]
步骤6:打一个729nm共振频率的π/2脉冲后,再打一个729nm共振频率的π/2脉冲,然后从一cf35石英观察窗通入397nm与866nm的激光对离子|e>态布居数进行探测;
[0028]
步骤7:重复以上步骤2
‑
6的过程,并且等间隔改变步骤4过程中自由振荡的时间,得到拉姆齐干涉条纹,从干涉条纹的移动读出由转动所引起的相位,然后根据萨格纳克效应计算出芯片式离子陀螺仪装置的转动角速度。
[0029]
本发明与现有技术相比,其有益效果在于:
[0030]
(1)采用单个囚禁离子作为载体,既有物质波干涉仪粒子携带能量大的优点,相较于原子团还有囚禁稳定、操作简单、相干时间长等优点。
[0031]
(2)利用离子阱芯片来操纵冷离子,装置能够实现小型化,是一种便于携带的微型陀螺仪,并且具有高度集成化的潜质。
[0032]
(3)利用离子波包在离子阱芯片上沿着干涉环路多次重复运动,可以实现萨格纳克相位累积,因此能够在极小的空间内得到非常大的有效面积,从而在不影响陀螺仪的灵敏度的基础上,极大地缩小整个装置的体积。
[0033]
(4)将离子量子态的叠加态作为量子态依赖力的施加对象,只需采用连续激光激发离子就能实现波包在动量空间的分离,相比用超快脉冲频率梳激发双光子受激拉曼过程,大大降低了装置成本和操作难度。
附图说明
[0034]
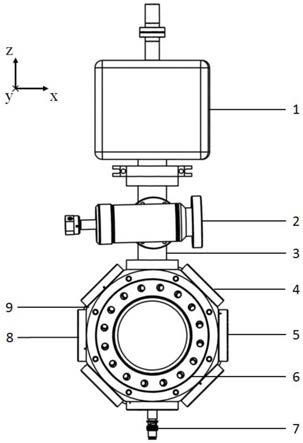
图1为芯片式离子陀螺仪结构示意图;
[0035]
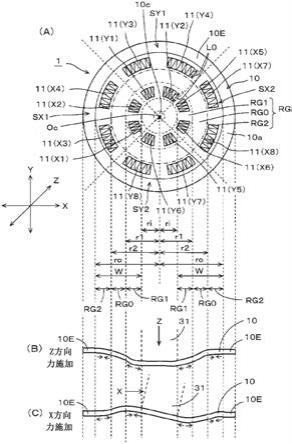
图2为微型表面电极离子阱结构示意图;
[0036]
图3为微型表面电极离子阱装配示意图;
[0037]
图4为量子态编码的
40
ca
能级结构示意图;
[0038]
图5为芯片式离子陀螺仪激光操纵时序图。
具体实施方式
[0039]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接、信号连接;可以是直接相连,也可以是通过中间媒介间接连接,可以说两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明的具体含义。下面结合附图和实施例对本发明的技术方案做进一步的说明。
[0040]
实施例:
[0041]
参阅图1所示,为本实施例提供的基于离子阱芯片的陀螺仪真空部分的组成示意图,主要由离子泵1和真空腔体9两个部分组成,并由三通真空管道3将它们连接起来,通过离子泵可以将系统真空度维持在10
‑9pa;真空角阀2用来连接分子泵机组,对真空部分进行预抽真空。真空腔体上有6个cf35石英观察窗、1个cf100石英观察窗6、1个cf100电极引线法兰24、1个cf35法兰口用于连接三通真空管道3以及1个cf35同轴bnc法兰7与外部射频电压源连接。其中cf100石英观察窗6用于荧光信号探测,cf35石英观察窗5用于729nm激光输入,cf35石英观察窗8用于激光冷却所需的圆偏振397nm激光,cf35石英观察窗4用于输入866nm激光以及激光冷却所需的线偏振397nm激光。
[0042]
图2为微型表面电极离子阱结构示意图,它主要包含1个中心直流电极10、1个环形射频电极11和7对直流控制电极12~18(其中有2对帽极12、18,1对中心补偿电极15)。
[0043]
图3为微型表面电极离子阱装配示意图,微型表面电极离子阱通过真空胶粘在一个陶瓷管座19上,微型表面电极离子阱的电极与陶瓷管座19的电极通过金丝连接,陶瓷管座19的引脚插在pcb插槽20上,该插槽利用不锈钢柱固定在固定板22上。在固定板22边缘固定一个钙炉21,用来喷射需要的钙原子,固定板22通过固定杆23固定在cf100电极引线法兰24上,pcb插槽20通过真空电缆与cf100电极引线法兰24上的电极连接起来,这样就可以高效、准确地将外部电压输入到微型表面电极离子阱的电极上。
[0044]
图4为
40
ca
能级结构示意图,利用
40
ca
离子的|g>=|4s
1/2
,m
j
=1/2>和|e>=|3d
5/2
,m
j
=3/2>两个塞曼子能级作为量子态的操作对象,通过调节729nm激光频率使其产生
耦合,发生干涉的两个波包为它们的叠加态。
[0045]
本实施例的芯片式离子陀螺仪测量转动的激光脉冲如图5所示,具体操作方法如下:
[0046]
步骤1:利用离子泵将陀螺仪的真空系统维持在10
‑9pa超高真空环境,在微型表面电极离子阱的15个直流电极与1射频电极11上分别加15个独立稳定的直流电压与1个射频高压,并在与cf35石英观察窗5和8相连的方向上施加均匀磁场,使微型表面电极离子阱的电极表面产生三维囚禁势阱,将原子炉喷射出的钙原子,通过光电离方式产生
40
ca
离子装载到该囚禁势阱中;
[0047]
步骤2:从cf35石英观察窗4通入397nmπ光和866nm激光2000μs对离子进行多普勒冷却后关闭397nmπ光,从cf35石英观察窗8输入σ
偏振的397nm激光20μs后,从cf35石英观察窗4输入π偏振的397nm激光1000μs,将离子冷却至运动基态后关闭π偏振的397nm激光,再过50μs后关闭σ
偏振的397nm激光与866nm激光,此时将离子制备到|g>态;
[0048]
步骤3:从cf35石英观察窗5输入红失谐、共振的729nm激光,从观察窗8输入蓝失谐的729nm激光,在两个幺正操作脉冲组u1之间,同时激发离子红、蓝边带跃迁20ms后关闭729nm激光,如图5中时序所示;
[0049]
步骤4:快速改变微型表面电极离子阱电极对12和18上的电压,将离子沿着z方向移动15μm距离,经过40ms的自由振荡后将让电极对12和18上的电压恢复到初始电压,离子恢复到初始位置;
[0050]
步骤5:在两个幺正操作脉冲组u2之间,同时激发离子红、蓝边带跃迁20ms后关闭729nm激光后,关闭729nm激光使离子波包停止转动,如图5中时序所示;
[0051]
步骤6:打一个729nm共振频率的π/2脉冲(相位为0)后,再打一个729nm共振频率的π/2脉冲(相位为φ),然后从cf35石英观察窗4通入397nm与866nm的激光对离子|e>态布居数进行探测;
[0052]
步骤7:重复以上步骤2
‑
6的过程,并且等间隔改变第4步过程中自由振荡的时间,得到拉姆齐干涉条纹,从干涉条纹的移动读出由转动所引起的相位,然后根据萨格纳克效应计算出芯片式离子陀螺仪装置的转动角速度。
[0053]
综上,本发明对于现有技术具有以下优点:
[0054]
(1)采用单个囚禁离子作为载体,既有物质波干涉仪粒子携带能量大的优点,相较于原子团还有囚禁稳定、操作简单、相干时间长等优点。具体地,单个钙离子的能量比光子大11个数量级;离子囚禁之后可以重复实验(步骤7),而原子陀螺仪每一次探测都需要重新捕获原子团,且稳定囚禁时间短;其它离子陀螺仪方案都需要超快脉冲激光与光学频率梳,而本方案只需连续激光即可。
[0055]
(2)利用离子阱芯片来操纵冷离子,装置能够实现小型化,是一种便于携带的微型陀螺仪,并且具有高度集成化的潜质。
[0056]
(3)利用离子波包在离子阱芯片上沿着干涉环路多次重复运动,可以实现萨格纳克相位累积,因此能够在极小的空间内得到非常大的有效面积,从而在不影响陀螺仪的灵敏度的基础上,极大地缩小整个装置的体积。具体地,步骤4的自由振荡部分即波包绕小面积重复运动40ms,干涉环路包围的有效面积可达实际空间面积的40000倍,所以本方案相比于相同灵敏度的原子陀螺仪,整个装置体积更小。
[0057]
(4)将离子量子态的叠加态作为量子态依赖力的施加对象,只需采用连续激光激发离子就能实现波包在动量空间的分离,相比用超快脉冲频率梳激发双光子受激拉曼过程,大大降低了装置成本和操作难度。
[0058]
上述实施例只是为了说明本发明的技术构思及特点,其目的是在于让本领域内的普通技术人员能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡是根据本发明内容的实质所做出的等效的变化或修饰,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。