1.本技术涉及冗余系统传感器装置及冗余系统传感器装置的异常判断方法。
背景技术:
2.以往,为了使传感器具有冗余性,考虑具备多个传感器和对应于这些传感器设置多个检测电路的结构,当一方异常而另一方正常时,仅使用另一方的传感器来继续进行控制(参照例如专利文献1)。现有技术文献专利文献
3.专利文献1:日本专利第6283737号公报
技术实现要素:
发明所要解决的技术问题
4.在专利文献1公开的现有电动助力转向装置的转矩传感器中,利用互不相同的检测元件来检测2个独立的转矩检测信号,共计设有4个电子电路和4条信号线路,并对它们分别进行比较来检测转矩传感器的异常。另外,还考虑使用3个传感器,并用少数服从多数的原则来判断正常或异常。
5.在考虑冗余系统的情况下,对于单纯的故障、例如断路或电压短路、接地短路那样固定在异常值的故障,能够简单地判断出正常或异常。然而,对于输出值不固定而是会发生变动但又不是准确变动的故障模式难以进行判断,仅通过2个传感器的单纯比较,难以判断出哪一个传感器正常。现有技术中,如上述专利文献1那样,通过设置多个传感器、多个检测电路和多条信号线路,即最少设置2倍数量的构成要素,并通过它们的比较验证来进行判断。然而,在这样的以2倍数量的要素构成的情况下,不仅成本增加,尺寸以及搭载性方面也大大变差。
6.本技术公开了用于解决上述问题的技术,其目的在于提供一种冗余系统传感器装置及冗余系统传感器装置的异常判断方法,在保证与现有装置同等的冗余性的状态下,能够削减该装置的电路和信号线路,从而能够降低成本,减少尺寸,并提高搭载性。用于解决技术问题的技术手段
7.本技术公开的冗余系统传感器装置的特征在于,包括:第一传感器,该第一传感器检测被检测对象物的物理特性,对应于检测出的物理特性而输出信号,并且输出存在预先设定的一定关系的多个输出信号;第二传感器,该第二传感器输出输出信号,该输出信号具有与所述第一传感器的多个输出信号中的任一个输出信号同等的特性;以及多个电子控制装置,该多个电子控制装置构成为具有用于判断输入信号有无异常的异常判断部,并通过能够相互通信的通信线路连接,彼此独立地进行动作,且该多个电子控制装置具有根据所述输入信号来运算提供给所述被检测对象物的电力并输出由此得到
的控制信号的控制电路,来控制所述被检测对象物,所述异常判断部构成为判断所述第一传感器的输出信号和所述第二传感器的输出信号有无异常,使用被判断为正常的输出信号来作为所述控制信号。发明效果
8.根据本技术公开的冗余系统传感器装置,能够提供一种冗余系统传感器装置及冗余系统传感器装置的异常判断方法,在保证与现有装置同等的冗余性的状态下,能够削减现有装置的电路和信号线路,从而能够降低成本,减少尺寸,并提高搭载性。
附图说明
9.图1是表示实施方式1的电动助力转向装置的一个示例的整体电路图。图2是实施方式1中的转矩传感器的电路图。图3是表示实施方式1中的转矩传感器的输出信号特性的一例的图。图4是实施方式1的电动助力转向装置的控制电路的局部放大图。图5是表示实施方式1的电动助力转向装置的传感器系统的异常判断方法的一个示例的流程图。图6是实施方式2中的旋转传感器的电路图。图7是实施方式2中的旋转传感器的输出信号特性图。图8是表示实施方式1中的转矩传感器的输出信号特性的另一例的图。
具体实施方式
10.本技术涉及在具有冗余性的基础上减少构成要素的冗余系统传感器装置。下面,以电动助力转向装置中使用的转矩传感器为例,利用附图来说明本技术的冗余系统传感器装置的优选实施方式的一个示例。
11.实施方式1.图1是表示实施方式1的电动助力转向装置的电路图。图2是转矩传感器的电路图,图3是输出信号图。
12.图1所示的实施方式1的电动助力转向装置具备电子控制装置1a、1b和电动机2。电子控制装置1a、1b采用基本相同的电路结构,电动机2是具备2组三相绕组(u1、v1、w1)的无刷电动机。当电子控制装置的其中一方或电动机的其中一方绕组发生异常时,只要另一方是正常的,就可以构成冗余系统,以使得电动机控制得以继续进行,电动机也能够旋转。因此,在以下的说明中,针对其中一方来进行。
13.电子控制装置1a被输入电源(电池)9、点火开关7、转矩传感器a8a、转矩传感器b8b、旋转传感器a17a、旋转传感器b17b各自的信号。电子控制装置1a由控制电路4a、逆变器电路3a、电源继电器5a等构成,与另一方的电子控制装置1b通过通信线路15连接。
14.控制电路4a由电源电路a13a、输入电路aa11a、输入电路ab12a、作为中央运算装置的cpu
a
10a、驱动电路a14a构成,cpu
a
10a根据转矩传感器a8a的输入来计算用于使电动机旋转的供电电力,并经由驱动电路a14a输出。
15.逆变器电路3a中设有形成上下桥臂的桥接电路的开关元件(例如fet、31u、32u),用于向三相绕组(u1、v1、w1)提供电流。还设有能够切断提供给电动机2的电流的继电器
34u、电流检测用分流电阻33u。电容器30u是为了抑制开关元件31u、32u的导通和截止所导致的逆变器电路3a的电源电压变动而设置的。
16.除此以外,电源继电器5a起到故障保护的功能,其能够切断总电源。此外,为了检测电动机2的旋转角,在电动机2的附近设有各自独立动作的2个旋转传感器即旋转传感器a17a、旋转传感器b17b。与上述相同,电子控制装置1b的控制电路4b也由电源电路b13b、输入电路ba11b、输入电路bb12b、作为中央运算装置的cpu
b
10b、驱动电路b14b构成。
17.如上所示,由于电子控制装置1a、1b构成为独立动作,因此,即使其中一方发生异常,也可以利用另一方来驱动电动机2,从而能够确保冗余性。电子控制装置1b也具备与上述电子控制装置1a相同的构成要素,如上述的控制电路4b、cpu
b
10b等。图中的电子控制装置1a、1b的外框上的
○
印记表示连接用的连接器。
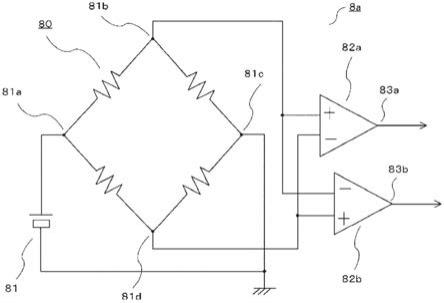
18.接下来,利用图2、图3,对转矩传感器的冗余系统进行说明。转矩传感器是检测作为被检测对象物的车辆方向盘的转向转矩的传感器,转矩传感器a8a在例如图2所示的电路图中由一个传感器构成。向桥接电路80的4个电阻的对角81a~81d提供电源81,在没有产生转矩即没有转向的情况下,4个电阻基本为同一值,在没有接收到电源供电的对角(81b、81d)处不产生电位差。通过对方向盘进行转向,电阻值发生变动,对角81a与对角81c之间不产生电位差,但对角81b与对角81d之间产生电位差,经由检测并放大该电位差的放大器a82a向输出信号端口83a输出信号。
19.相比于放大器a82a,放大器b82b的输入信号的 、
‑
相反,其输出信号端口的信号特性如图3所示,输出信号端口83b的信号特性(参照图中的特性曲线b)与输出信号端口83a的信号特性(参照图中的特性曲线a)相反。输出信号端口83a、83b的信号被输入到cpu
a
10a,因此,信号可取值的范围为0v~5v。而且,由于方向盘向左向右都可以转向,因此,设为如下特性:将中立位置(方向盘不转向而直行行驶的位置)设为2.5v,输出信号端口83a的电压值在右转方向上是大于2.5v的值(参照特性曲线a),在左转时相反而成为小于2.5v的值(参照特性曲线b)。图3中,横轴表示方向盘等被检测对象物的物理变量,纵轴表示作为检测传感器的转矩传感器的输出电压特性。
20.还设定为该输出信号端口83a的最大电压值=4.5v,最小电压值=0.5v,因此,在发生断路(电压值≈0v)、电压短路(电压值≈5v)、接地短路(电压值≈0v)时,能够立即判断出异常。
21.若设置2组上述的转矩传感器,则需要4个输出信号端口,电路、传感器也随之全都需要2组,因此无论是成本还是搭载性,都有很大弊端。因此,对于涉及冗余性的装置结构,采用拥有与具备4个输出信号端口的现有装置同等的冗余性能但第二组的转矩传感器只有一个输出信号端口的结构,可削减电路、输出信号线路以外的构成要素。
22.对于具有2个输出信号端口的转矩传感器a8a、具有1个输出信号端口的转矩传感器b8b共设置2组的情况下,具备异常判断部(具体将在后文阐述)的电子控制装置1a的正常或异常判断进行说明。该异常判断部安装在cpu
a
10a中。这里,转矩传感器b8b具备输出与输出信号端口83a同等的信号(未图示)的输出信号端口83c。由于具备这3个输出信号端口,因此,对各个输出信号端口的输出进行两两比较。
23.首先,将输出信号端口83a、83b的电压值相加,若是正常的情况,则相加后的值固定在约5v。然后,将输出信号端口83b、83c的电压值相加,若是正常的情况,则同样固定在5v。同样地,将输出信号端口83a、83c的电压值相减,若是正常的情况,则相减后的值固定在约0v。通过上述那样将3个输出信号端口的电压值两两比较,能够判断正常或异常。以下,将上述3处的输出信号端口83a、83b、83c的电压值分别记为[83a]、[83b]、[83c]。
[0024]
上述比较验证在图1的cpu
a
10a、cpu
b
10b内部所设置的后述的异常判断部中进行。具体的比较验证方法分以下5种情况,共计8类。1)判断为83a系统异常的情况下的输出信号端口的电压值[83a] [83b]≠5v且[83b] [83c]=5v[83a]
‑
[83c]≠0v且[83b] [83c]=5v2)判断为83b系统异常的情况下的输出信号电压值[83a] [83b]≠5v且[83a]
‑
[83c]=0v[83b] [83c]≠5v且[83a]
‑
[83c]=0v3)判断为83c系统异常的情况下的输出信号电压值[83b] [83c]≠5v且[83a] [83b]=5v[83a]
‑
[83c]≠0v且[83a] [83b]=5v4)判断为所有系统正常的情况下的输出信号电压值[83a] [83c]=5v且[83b] [83c]=5v且[83a]
‑
[83c]=0v5)判断为2个以上传感器系统异常的情况下的输出信号电压值[83a] [83b]≠5v且[83a]
‑
[83c]≠0v且[83b] [83c]≠5v
[0025]
这里,具体如图4所示,上述cpu
a
10a具备3个主要构成要素,即异常判断部18、运算部19和存储部20。该cpu
a
10a如上所述经由输入电路ab12a接收来自转矩传感器a8a的输出信号端口83a、83b、转矩传感器b8b的输出信号端口83c共计3个输出信号端口的信号的输入。然后,基于这3种不同输出信号端口的电压值,从3种输出信号端口中选择任意2个不同输出信号端口的电压,在运算部19中运算这两个电压值的和或差,并将至少2个该结果存储到存储部20中,并且利用上述异常判断部18来判断各输出信号端口的信号是正常还是异常。
[0026]
接下来,利用图5所示的流程图,说明上述异常判断部18判断各输出信号端口的信号是正常还是异常的判断方法的一个示例。具体而言,图5是如下方法的说明图:图1所示的控制电路4a中的cpu
a
10a接收到经由输入电路输入的输出信号端口的信号中,尤其是经由输入电路ab12a输入的输出信号端口83a、83b、83c的信号(步骤s1)的情况下,判断这些输出信号端口是正常还是异常。
[0027]
图中,左侧的步骤s2~步骤s4表示专门判断1个输出信号端口系统(等同于传感器系统。这里的系统是指“system”)正常还是异常的流程(上述的1)~3)的情况),右侧的步骤s5~步骤s9表示判断2个以上输出信号端口系统(等同于传感器系统)正常还是异常的流程(上述的4)和5)的情况)。其中,步骤s5~步骤s7的流程表示上述的4)中判断所有传感器系统是否正常的情况下的流程图,步骤s5、步骤s6~步骤s8、步骤s9的流程表示上述的5)中判断2个以上传感器系统是否异常的情况下的流程图。
[0028]
在上述的1)~3)的情况下,异常判断部18判断为异常时,利用正常的输出信号继
续进行电动机控制,以使控制继续进行。当cpu
a
10a、cpu
b
10b通过通信线路15相连接时,2个cpu的异常判断结果也可以进行对照,若结果相同,则用正常值继续进行控制,若2个cpu的异常判断结果不同或者是上述的5)的情况,则表示控制无法继续进行,但暂时利用与为正常值的上次值相接近的值还是可以避免控制突然中断这样的动作。
[0029]
通过这样的异常判断,无需中断执行过程中的控制,仅利用正常传感器输出信号就能继续进行控制。而且,即使是现有装置那样具有4个输出信号端口的结构,也可以进行同样的比较验证,而3个和4个输出信号端口并无显著差异,但图2中的放大器b82b、输出信号端口83b可以各自减少一个。
[0030]
如上所述,一组传感器的输出信号中的一方和另一方的输出特性并不是相同特性,且两者具有一定的规定关系,第二组传感器的特性与第一组中的任意一个传感器的特性相同,以此为条件,可以得到并非完全独立的两组传感器,且其中一方只有一个输出信号端口这样的传感器结构,从而即使是共计具有3个输出信号端口的结构,也可以具备相同程度的冗余性,能够削减电路、输出信号线路等。图2的传感器中,作为输出电路的放大器有2个(放大器a、放大器b),作为传感器本身的桥接电路80有1个,但也可以是使用2个传感器本身并分别具有输出电路的结构。
[0031]
实施方式2.接下来,转矩传感器以外的传感器也能够得到与实施方式1相同的目的和效果,因此利用图6、图7对其它传感器进行说明。本实施方式2中,对图1的电动助力转向装置中的旋转传感器a17a和旋转传感器b17b进行说明。
[0032]
图6表示旋转传感器的简要电路图,例如是采用旋转变压器结构的传感器。在图6的中央,作为被检测对象物的转子17h呈花瓣状地设置在电动机2的输出轴端17j,转子17h随着电动机2的输出轴的旋转而旋转。5个线圈中的17c、17f是励磁用线圈,由于花瓣状的转子17h的凸部和凹部之间的不同,在检测用线圈17d、17e、17g中流过电流。第一组旋转变压器由励磁用线圈17c、检测用线圈17d、17e构成。第二组由励磁线圈17f、检测用线圈17g构成。
[0033]
图7中示出信号波形。在励磁用线圈17c上施加励磁波形,其波形如17c1所示。通过使转子的凹凸(花瓣形状)接近或远离检测用线圈17d、17e,检测用线圈17d、17e上产生的信号分别变成形状为正弦波波形的检测输出波17d1或形状为余弦波波形的检测输出波17e1。基于这些正弦波波形的检测输出波17d1、余弦波波形的检测输出波17e1求其正切,从而计算出作为物理特性的旋转角。
[0034]
另一方面,第二组传感器设为输出励磁信号和正弦波(或余弦波)的其中一方时,将3个输出信号两两比较,来判断正常还是异常。在使检测输出波17d1和检测输出波17e1的其中一方的相位偏差规定角度(90度)并比较(相减)的情况下,若是正常,则结果为约0v。同样,检测输出波17e1和正弦波波形的检测输出波17g1(未图示)也可以相位偏差规定角度来进行比较验证,检测输出波17d1、17g1彼此可以通过简单的比较(相减)来进行比较验证。这里,旋转传感器的检测输出波17d1、17e1、17g1分别对应于实施方式1中的转矩传感器的情况下的输出信号端口83a、83b、83c的输出。因此,能够与实施方式1的情况同样地进行旋转传感器系统的正常或异常判断。
[0035]
如上所示,即使是旋转传感器,只要使一组2个输出信号具有一定关系,且第二组
传感器的输出信号与上述2个输出信号中的任一方相同,就可以通过对3个输出信号分别进行比较验证,来判断正常或异常。由此,即使是完全2倍数量、即2组各有2个输出信号从而共计有4个输出信号的传感器结构,也能够实现成本的降低和搭载性的提高。另外,所能使用的传感器类型并不限于上述元件,也可以是例如霍尔元件、磁阻元件等,其具有通用性的特征。
[0036]
另外,图1中说明了有2个cpu(cpu
a
、cpu
b
)的结构,但即使是只有1个cpu且电子控制装置1a、1b也只有1个的结构,只要转矩传感器a8a、转矩传感器b8b或旋转传感器a17a、旋转传感器b17b有3个输入信号端口,就可以实现具有与上述同样效果的装置结构。另外,为了得到与上述相同的效果,也可以是逆变器电路3a、3b和电动机2的三相绕组设有2组这样的只有输出级才由双重系统构成的装置结构。如上所述,传感器的输入信号端口或者输出信号端口共设置三处,从而能够减少接口电路、cpu端口。
[0037]
另外,一组传感器的输出信号中一方和另一方的输出特性并非相同特性,两者具有一定关系,且第二组传感器的特性与第一组中的任意一方的特性相同,以此为条件,但在第二组传感器的特性与第一组传感器中的任意一方传感器的特性具有一定关系的情况下,也能够同样地判定故障,能够具有相同程度的冗余性。这里,将上述相同的情况和具有一定关系的情况合称为具有同等特性的情况。
[0038]
这里,上述的一定关系只要是例如相位偏差规定角度的不同情况即可,也包括了相位错开且相位匹配的情况。即,像sin、cos的组合那样,只要相位错开且相位匹配,就可以通过简单的运算(相减)来进行比较验证。同样,信号有偏移的情况也包含在一定关系的范围内。例如图8所示,对于虚线所示的特性曲线b,在比较之前对偏移(偏移量δv)预先进行校正,将该偏移量δv消除为零之后得到特性曲线c的情况下,若特性曲线a和特性曲线c的关系为相反特性,则也可以进行比较验证。也就是说,具有上述关系的特性曲线a和特性曲线b的关系也包含在“一定关系”的范围内。以上说明了仅特性曲线b存在偏移的情况,但不限于此,还包括如下情况:在特性曲线a和特性曲线b都存在偏移的情况下,通过将双方的偏移量消除为零,两者的关系也成为相反特性。
[0039]
另外,在判定故障后也利用剩余的正常的输出信号继续进行控制,但为了在此情况下也利用剩余的正常的输出信号进行故障判定,继续进行比较验证,以判定正常或异常。由此,在发生了一次故障后继续进行控制的情况下,即使发生第二次故障,也可以判定该故障,并向周围进行通知以转至正常状态。
[0040]
虽然本技术记载了各种示例性实施方式和实施例,但是在一个或多个实施方式中记载的各种特征、方式和功能不限于特定实施方式的应用,可以单独地或以各种组合来应用于实施方式。因此,可以认为未示例的无数变形例也包含在本技术说明书所公开的技术范围内。例如,假设包括对至少一个构成要素进行变形、添加或省略的情况,以及提取至少一个构成要素并与其他实施方式的构成要素进行组合的情况。标号说明
[0041]
1a、1b电子控制装置;2电动机;3a、3b逆变器电路;4a、4b控制电路;8a转矩传感器a;8b转矩传感器b、10a cpu
a
;10b cpu
b
;11a输入电路aa;11b输入电路ba;12a输入电路ab;
12b输入电路bb;13a电源电路a;13b电源电路b;14a驱动电路a;14b驱动电路b;15通信线路;17a旋转传感器a;17b旋转传感器b;17d1、17e1、17g1检测输出波;18异常判断部;80桥接电路;81电源;81a、81b、81c、81d对角;82a放大器a;82b放大器b;83a、83b、83c输出信号端口。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。