1.本发明涉及一种水域垃圾清理系统及控制方法,尤其涉及一种水域垃圾清理机器人工况自适应系统及控制方法。
背景技术:
2.伴随着社会的发展,人们逐渐认识到环保的重要性。近年来,水上漂浮垃圾污染问题层出不穷,大量漂浮垃圾的存在,不但破坏生态、影响水质、加重航道整治任务、有碍城市发展及旅游景点建设、还给水生物造成了极大的伤害。面对严峻挑战,目前市面上的一些漂浮垃圾回收设备或回收方法极为耗时耗力,且效率不高,因此对于更加环保高效的漂浮垃圾回收方法的研究十分迫切,具有重要的环保、经济和社会意义。
技术实现要素:
3.发明目的:本发明目的是提供一种水域垃圾清理机器人工况自适应系统及控制方法,以解决水域工况复杂,水域垃圾清理机器人自动化工作难度大、效率低的问题。
4.技术方案:本发明包括摄像头、探测器、微电脑、单片机及清理机器人,所述的摄像头和探测器均与微电脑连接,所述的微电脑依次与单片机及清理机器人连接,所述的微电脑包括接收模块、处理模块、存储模块、第一确定模块、第二确定模块、匹配模块与输出模块,其中,接收模块、处理模块、存储模块、第一确定模块和第二确定模块相互配合,实时分析、确定水域内工作环境情况;第一确定模块、第二确定模块、匹配模块相互配合,以确定适应当下工作环境的工作模式;匹配模块与输出模块相互配合,将确定的工作模式传输给清理机器人。
5.所述的探测器为水流流速、流向探测器,探测水域工况数据。
6.所述的摄像头获取水域工作区域内漂浮垃圾图像,形成工作水域内漂浮垃圾图像。
7.所述的微电脑根据漂浮垃圾图像判定收集工况类型,根据水域工况数据判定水域工况类型。
8.所述的微电脑根据收集工况类型、水域工况类型确定工作模式,并将相应的工作模式传输给单片机,单片机控制清理机器人根据工作模式进行清理工作。
9.一种水域垃圾清理机器人工况自适应系统的控制方法,包括以下步骤:
10.s110、摄像头获取水域工作区域内漂浮垃圾图像,水流流速、流向探测器探测水域工况数据;
11.s121、微电脑根据漂浮垃圾图像判定收集工况类型;
12.s122、微电脑根据水域工况数据判定水域工况类型;
13.s130、微电脑根据收集工况类型、水域工况类型,确定工作模式;
14.s140、微电脑将相应的工作模式传输给单片机;
15.s150、单片机控制清理机器人根据工作模式进行清理工作。
16.所述s121中的判定方法包括:
17.(1)微电脑根据预设的漂浮垃圾模型对漂浮垃圾图像进行匹配,以判定漂浮垃圾类型;
18.(2)微电脑对漂浮垃圾类型进行分析,以获取漂浮垃圾信息;
19.(3)微电脑通过漂浮垃圾信息匹配预设的收集工况,以判定收集工况类型。
20.所述s122中的判定方法为:微电脑以水域工况数据中水流方向、大小为与水域工况模型匹配的关键信息,水域工况数据中水流方向、大小在同一范围梯度内属于同一水域工况模型。
21.所述s130中工作模式的确定方法为:微电脑根据收集工况类型匹配预设的清理模式,根据水域工况类型匹配预设的移动模式,并将匹配的清理模式、移动模式进行组合,以确定工作模式。
22.所述的单片机分别向清理机器人收集模块和推进模块发送工作模式中对应的清理模式信号和移动模式信号,以使机器人高效完成水域内的垃圾清理工作。
23.有益效果:本发明可以实时检测水域工作环境,根据环境采用不同的收集模式、移动模式的工作模式组合,适应性更强,工作效率更高;以水域环境的漂浮垃圾数量、大小,水域工况的水流方向、大小为关键信息,梯度归类,避免了工作模式的连续突变,增加了系统的稳定性;将智能控制方式应用于水域漂浮垃圾清理领域,加快了水域漂浮垃圾收集的速率,解放了人力,有很好的环保、经济意义。
附图说明
24.图1为本发明的控制方法流程图;
25.图2为本发明的微电脑判定收集工况类型及水域工况类型的方法;
26.图3为本发明一种清理模式确定方法示意图;
27.图4为本发明一种移动模式确定方法示意图;
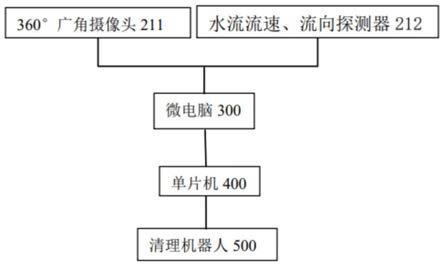
28.图5为本发明的系统组成图;
29.图6为本发明的微电脑结构示意图。
具体实施方式
30.下面结合附图对本发明作进一步说明。
31.如图5所示,本发明包括360
°
广角摄像头211,水流流速、流向探测器212,微电脑300,单片机400以及清理机器人500,360
°
广角摄像头211及水流流速、流向探测器212均与微电脑300连接,360
°
广角摄像头211拍摄周围水域漂浮垃圾画面,形成工作水域内漂浮垃圾图像,水流流速、流向探测器212探测水流的流速、流向信息,组成水域工况数据,并传送给微电脑300。微电脑300依次与单片机400、清理机器人500连接。微电脑300根据收集工况类型、水域工况类型,确定工作模式,并将相应的工作模式传输给单片机400,单片机400控制清理机器人500根据工作模式进行清理工作。
32.如图6所示,微电脑300包括接收模块310、处理模块320、存储模块330、第一确定模块340、第二确定模块350、匹配模块360和输出模块370,其中,接收模块310、处理模块320、存储模块330依次连接,匹配模块360和输出模块370连接。接收模块310用于接收漂浮垃圾
图像和水域工况数据;处理模块320用于对接收的漂浮垃圾图像和水域工况数据进行匹配前的预处理;存储模块330用于存储预设的漂浮垃圾模型、收集工况模型、水域工况模型以及清理模式、移动模式;第一确定模块340根据漂浮垃圾图像判定收集工况类型;第二确定模块350根据水域工况数据判定水域工况类型;匹配模块360根据收集工况类型、水域工况类型,匹配预设的清理模式和移动模式并进行组合,确定工作模式;输出模块370将相应的工作模式传输给单片机400。
33.接收模块310、处理模块320、存储模块330、第一确定模块340、第二确定模块350相互配合用于实时分析、确定水域内工作环境情况;第一确定模块340、第二确定模块350、匹配模块360相互配合,以确定适应当下工作环境的工作模式;匹配模块360与输出模块370相互配合,将确定的工作模式传输给清理机器人,使其进行高效的水域清理工作。
34.如图1所示,本发明的控制方法包括以下步骤:
35.s110、摄像头获取水域工作区域内漂浮垃圾图像,水流流向、流速探测器探测水域工况数据,具体为:采用360
°
广角摄像头211拍摄周围水域漂浮垃圾画面,形成工作水域内漂浮垃圾图像;水流流速、流向探测器212探测水流的流速、流向信息,组成水域工况数据。
36.s121、微电脑300根据漂浮垃圾图像判定收集工况类型,具体的判断方式以漂浮垃圾图像中垃圾数量、大小为与漂浮垃圾模型匹配的关键信息,漂浮垃圾图像中垃圾数量、大小在同一范围梯度内属于同一漂浮垃圾模型,避免了匹配模型的连续突变,增加了系统的稳定性,如图2所示,具体包括:
37.(1)微电脑300根据预设的漂浮垃圾模型对漂浮垃圾图像进行匹配,以判定漂浮垃圾类型;
38.(2)微电脑300对漂浮垃圾类型进行分析,以获取漂浮垃圾信息;
39.(3)微电脑300通过漂浮垃圾信息匹配预设的收集工况,以判定收集工况类型。
40.如图3所示,漂浮垃圾模型分为小密度模型、一般密度模型、大密度模型三类,对应漂浮垃圾图像中1平方米单位面积内垃圾面积占比小于5%、1平方米单位面积内垃圾面积占比处于5%与10%之间、1平方米单位面积内垃圾面积占比大于10%三种梯度情况;对应匹配小功率收集工况,正常收集工况和大功率收集工况,当工况确定后再确定相应清理模式。
41.s122、微电脑300根据水域工况数据判定水域工况类型,具体的判断方式为:微电脑300根据预设的水域工况模型对水域工况数据进行匹配,以判定水域工况类型,以水域工况数据中水流方向、大小为与水域工况模型匹配的关键信息,水域工况数据中水流方向、大小在同一范围梯度内属于同一水域工况模型,避免了匹配模型的连续突变,增加了系统的稳定性。
42.如图4所示,水域工况模型分为慢速流速模型、一般流速模型、快速流速模型三类,对应流速数据中水流速度小于1m/s、流速数据中水流速度处于1m/s到2m/s之间、流速数据中水流速度大于2m/s三个梯度;对应匹配小功率推进水域工况、正常推进水域工况和快速推进水域工况,当工况确定后再确定相应移动模式。
43.s130、微电脑300根据收集工况类型、水域工况类型,确定工作模式,具体地,微电脑根据收集工况类型匹配预设的清理模式,根据水域工况类型匹配预设的移动模式,并将匹配的清理模式、移动模式进行组合,以确定工作模式。
44.s140、微电脑300将相应的工作模式传输给单片机400。
45.s150、单片机400控制清理机器人500根据工作模式进行清理工作,具体地,单片机400分别向清理机器人500收集模块和推进模块发送工作模式中对应的清理模式信号和移动模式信号,以使机器人高效完成水域内的垃圾清理工作。
46.本发明以面对水域复杂环境,实现了根据不同环境自主选择合适的工作模式,保证了水域垃圾清理机器人适应性和高效性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。