15.式中:d
safe
为安全车间距,τ为车间时距,v
h
为本车车速,d0为静止状态下两车最小距离。
16.计算紧急制动临界距离:
[0017][0018]
式中:d
emergency
为紧急制动临界距离,t
s
为制动系统响应时间,v
h
为本车车速,v
rel
为前后车相对车速,a
max
为紧急制动状态下最大加速度,d0为静止状态下两车之间最小距离。
[0019]
根据本发明实施例的一种具体实现方式,所述步骤s2具体为:
[0020]
当前方无车辆、或本车与前车距离大于安全车间距、或前车车速大于本车车速时,判定车辆处于定速巡航模式;当本车与前车距离小于安全车距且大于紧急制动临界距离、或前车车速小于本车车速时,判定车辆处于跟车巡航模式。
[0021]
根据本发明实施例的一种具体实现方式,所述步骤s2中还包括:当本车与前车距离小于紧急制动临界距离时,判定车辆进入紧急制动模式。车辆进入紧急制动模式则直接输出最大制动力。
[0022]
根据本发明实施例的一种具体实现方式,所述步骤s3中,本车处于定速巡航模式时,所述期望纵向加速度计算方式如下:
[0023]
e(t)=v
set
‑
v
h
[0024][0025]
式中,e(t)为速度误差,v
set
为目标车速,v
h
为本车车速,u(t)为期望加速度,k
p
为比例系数,k
i
为积分系数,k
d
为微分系数。定速巡航模式下,加入pid控制,能够保证车辆的舒适性,同时能够使车辆的车速尽快达到设定车速。
[0026]
根据本发明实施例的一种具体实现方式,所述步骤s3中,本车处于跟车巡航模式时,所述期望纵向加速度计算方式如下:
[0027]
1)建立平稳跟车模式状态空间模型如下:
[0028][0029]
式中,x(k)=[δd(k),v
rel
(k),v
h
(k),a
h
(k),j(k)],δd(k)=d
‑
d
safe
为车间距误差,a
h
(k)为本车加速度,u(k)为期望加速度,w(k)为前车加速度,y(k)=[δd(k),v
rel
(k),a
h
(k),j(k)],a、b、g、c、z为系统的系数矩阵,分别为
[0030][0031][0032][0033][0034][0035]
其中,t
s
为系统采样时间,t
j
为时间常数,τ表示车间时距,d0表示静止状态下最小车间距;
[0036]
2)设置系统约束:
[0037]
对两车距离、本车和前车实际车间距和安全车间距偏差值、本车和前车速度偏差值设定约束范围;对本车的速度、加速度、加速度变化率及控制变量设定约束范围:
[0038]
3)建立综合性能指标函数j如下:
[0039][0040]
式中,δd(k)=d
‑
d
safe
为车间距误差,δv(k)=v
rel
=v
f
‑
v
h
为相对速度,a
h
(k)为自车加速度,δu(k)为期望加速度增量,ω
δd
为车间距误差的权重系数,ω
δv
为相对速度的权
重系数,ω
ah
为本车加速度的权重系数,ω
δu
为期望加速度增量的权重系数,t为积分时间;
[0041]
4)根据平稳跟车模式状态空间模型、综合性能指标函数及系统约束,在k时刻,获取优化指标对应的最优期望跟车加速度。
[0042]
根据本发明实施例的一种具体实现方式,所述步骤s4具体为:
[0043]
预标定与车速对应的驱动制动切换曲线,并在切换曲线上方和下方添加缓冲区域;
[0044]
在对应车速下,若获取的期望纵向加速度在切换曲线及缓冲区域上方,则acc系统进入驱动状态;若获取的期望纵向加速度在切换曲线及缓冲区域下方,则acc系统进入制动状态。
[0045]
根据本发明实施例的一种具体实现方式,所述步骤s5中,本车为驱动状态时,所述电机驱动力矩计算方式如下:
[0046][0047]
式中,t
motor
为电机驱动力矩,i0为传动系统传动比,η
t
为传动效率,r为车轮滚动半径,c
d
为空气阻力系数,a为迎风面积,θ为道路坡度角,m为整车质量,a为系统输出的期望纵向加速度,v为纵向车速,f为滚动阻力系数,为行驶阻力。
[0048]
根据本发明实施例的一种具体实现方式,所述步骤s5中,本车为制动状态时,所述车辆制动力计算方式如下:
[0049][0050]
式中,f
b
为期望车辆制动力,c
d
为空气阻力系数,a为迎风面积,θ为道路坡度角,m为整车质量,a为系统输出的期望纵向加速度,v为纵向车速,f为滚动阻力系数。
[0051]
第二方面,本发明实施例提供了一种纯电动客车自适应巡航纵向控制装置,包括:
[0052]
计算模块,所述计算模块用以获取本车车速及前车车速并计算安全车间距和紧急制动临界距离;
[0053]
模式判定模块,所述模式判定模块用以获取本车与前车距离并根据所述安全车间距和紧急制动临界距离判定本车处于定速巡航模式或跟车巡航模式;
[0054]
期望纵向加速度计算模块,所述期望纵向加速度计算模块用以若本车在定速巡航模式下,则基于pid控制计算定速巡航模式下的期望纵向加速度;若本车在跟车巡航模式下,则基于模型预测控制计算跟车巡航模式下的期望纵向加速度;
[0055]
状态切换模块,所述状态切换模块用以根据所述期望纵向加速度确定本车切换驱动或制动状态;
[0056]
转变模块,所述转变模块用以若本车为驱动状态,则将所述期望纵向加速度转变为对应的电机驱动力矩,完成对车辆的控制;若本车为制动状态,则将所述期望纵向加速度转变为对应的车辆制动力,完成对车辆的控制。
[0057]
第三方面,本发明实施例还提供了一种电子设备,该电子设备包括:
[0058]
至少一个处理器;以及,
[0059]
与该至少一个处理器通信连接的存储器;其中,
[0060]
该存储器存储有可被该至少一个处理器执行的指令,该指令被该至少一个处理器执行,以使该至少一个处理器能够执行前述任第一方面或第一方面的任一实现方式中的纯电动客车自适应巡航纵向控制方法。
[0061]
本发明的实施例至少具有如下技术效果:
[0062]
第一、该控制方法无需对每辆车控制器增益系数进行参数标定,可通过算法实时输出期望纵向加速度,时效性强,在保证舒适性的前提下使车速尽快达到设定车速。
[0063]
第二、跟车巡航模式下,建立平稳跟车模式状态空间模型,综合性能指标函数综合考虑安全性、跟随性、舒适性以及经济性,优化调节各个性能指标的权重,实现车辆最优性能的期望纵向加速度。
[0064]
第三、输出的期望纵向加速度,与驱动制动切换曲线比较,确定制动和驱动的状态,再将期望纵向加速度转变为期望的电机驱动力矩或期望的制动力,完成对车辆的精确控制。
附图说明
[0065]
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
[0066]
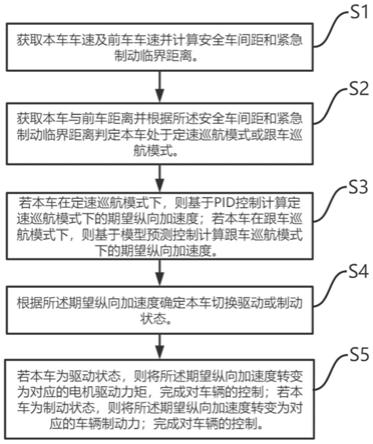
图1示出了本发明实施例所提供的一种纯电动客车自适应巡航纵向控制方法的流程图;
[0067]
图2示出了本发明实施例中的驱动制动切换曲线的示意图;
[0068]
图3示出了本发明实施例所提供的一种纯电动客车自适应巡航纵向控制装置的结构框图;
[0069]
图4示出了本发明实施例所提供的一种纯电动客车自适应巡航纵向控制电子设备的结构示意图。
具体实施方式
[0070]
下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只是作为示例,而不能以此来限制本发明的保护范围。
[0071]
需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
[0072]
图1为本发明实施例提供的一种纯电动客车自适应巡航纵向控制方法的步骤流程图,参见图1,该方法包括以下步骤:
[0073]
s1:获取本车车速及前车车速并计算安全车间距和紧急制动临界距离。
[0074]
1)采用固定时距的可变车间距算法计算安全车间距:
[0075]
d
safe
=τv
h
d0ꢀꢀ
(1)
[0076]
式(1)中:d
safe
为安全车间距,τ为车间时距,v
h
为本车车速,d0为静止状态下两车最
小距离。
[0077]
2)计算紧急制动临界距离:
[0078][0079]
式(2)中:d
emergency
为紧急制动临界距离,t
s
为制动系统响应时间,v
h
为本车车速,v
rel
为前后车相对车速,a
max
为紧急制动状态下最大加速度,d0为静止状态下两车之间最小距离。
[0080]
s2:获取本车与前车距离并根据所述安全车间距和紧急制动临界距离判定本车处于定速巡航模式或跟车巡航模式。
[0081]
当前方无车辆、或本车与前车距离大于安全车间距、或前车车速大于本车车速时,判定车辆处于定速巡航模式;当本车与前车距离小于安全车距且大于紧急制动临界距离、或前车车速小于本车车速时,判定车辆处于跟车巡航模式;当本车与前车距离小于紧急制动临界距离时,判定车辆进入紧急制动模式,车辆进入紧急制动模式则无需进行后续步骤直接输出最大制动力。
[0082]
s3:若本车在定速巡航模式下,则基于pid控制计算定速巡航模式下的期望纵向加速度;若本车在跟车巡航模式下,则基于模型预测控制计算跟车巡航模式下的期望纵向加速度。
[0083]
本车处于定速巡航模式时,期望纵向加速度计算方式如下:
[0084]
基于pid控制计算定速巡航模式下的期望纵向加速度,同时设置加速度上下限,在保证舒适性的前提下使车速尽快达到设定车速;
[0085]
e(t)=v
set
‑
v
h
[0086][0087]
式(3)中,e(t)为速度误差,v
set
为目标车速,v
h
为本车车速,u(t)为期望加速度,k
p
为比例系数,k
i
为积分系数,k
d
为微分系数。
[0088]
本车处于跟车巡航模式时,所述期望纵向加速度计算方式如下:
[0089]
1)建立平稳跟车模式状态空间模型:
[0090]
根据两车的相对运动状态,建立本车与前方目标车辆的状态关系模型:
[0091]
d=x
f
‑
x
h
[0092]
δd=d
‑
d
safe
[0093]
v
rel
=v
f
‑
v
h
ꢀꢀꢀꢀ
(4)
[0094]
式(4)中,d表示前车与本车之间的距离,x
h
表示主车的位置,x
f
表示前车的位置,δd表示车间距误差,d
safe
表示两车之间的安全车距,v
rel
表示两车的相对车速,v
f
表示前车车速,v
h
表示本车车速。
[0095]
由于车辆传动系统具有时滞性,可用一阶惯性环节描述本车的加速度响应特性:
[0096]
[0097]
式(5)中,a
h
为本车实际加速度,a
des
为期望加速度,k
l
为系统增益,t
j
为时间常数,s为laplace算子。
[0098]
根据纵向加速度响应模型和主车与前方车辆的车间纵向运动学关系,可以建立车辆纵向跟车模型:
[0099][0100]
v
rel
(k 1)=v
rel
(k) a
f
(k)t
s
‑
a
h
(k)t
s
[0101]
v
h
(k 1)=v
h
(k) a
h
(k)t
s
[0102][0103][0104]
式(6)中,v
h
(k)表示k时刻本车的纵向速度,a
f
(k)、a
h
(k)分别是前后两车k时刻的加速度,v
rel
(k)表示两车k时刻的相对速度,u(k)表示系统发出的期望加速度信号,j(k)表示k时刻本车加速度的变化率,t
s
为系统采样时间。
[0105]
定义状态向量为x
h
=[δd(k),v
rel
(k),v
h
(k),a
h
(k),j(k),将前车加速度观测值a
f
作为方程的扰动量,建立自适应巡航纵向动力学离散状态空间方程。
[0106]
x(k 1)=ax(k) bu(k) gw(k)
ꢀꢀ
(7)
[0107]
式(7)中,a、b、g为系统的系数矩阵:
[0108][0109]
[0110][0111]
选取车间距误差δd,前车与本车的相对速度v
rel
,本车加速度a
h
和本车加速度变化率j作为优化性能指标,自适应巡航控制系统的输出方程如下所示:
[0112]
y(k)=cx(k)
‑
z
[0113][0114][0115]
式(9)中,τ表示车间时距,d0表示静止状态下最小车间距。
[0116]
最终形成的平稳跟车模式状态空间模型如下:
[0117][0118]
2)设置系统约束:
[0119]
对于安全性指标,始终保证两车间的实际车间距大于一个安全跟车间距,以此避免发生追尾的情况,因此需要对真实的两车距离施加相应的硬约束:
[0120]
d=x
f
‑
x
h
≥d
c
ꢀꢀ
(11)
[0121]
式(11)中,d
c
表示最小安全车距。
[0122]
对本车和前车实际车间距和安全车间距偏差值以及本车和前车速度偏差值设定硬约束:
[0123]
δd
min
≤δd≤δd
max
[0124]
δv
min
≤δv≤δv
max
ꢀꢀ
(12)
[0125]
式(12)中,δd
min
,δd
max
为本车和前车实际车间距和安全车间距偏差最小值和最大值;δv
min
,δv
max
为本车和前车速度偏差最小值和最大值。
[0126]
此外,考虑到车辆自身的能力限制和舒适性要求,对本车的速度、加速度、加速度变化率及控制变量进行如下约束:
[0127]
v
min
≤v(k)≤v
max
[0128]
a
min
≤a(k)≤a
max
[0129]
j
min
≤j(k)≤j
max
[0130]
u
min
≤u(k)≤u
max
ꢀꢀ
(13)
[0131]
式(13)中,v
min
、v
max
、a
min
、a
max
、j
min
、j
max
、u
min
、u
max
分别为本车最小车速、本车最大车
速、本车最小加速度、本车最大加速度、本车最小加速度变化率、本车最大加速度变化率、本车期望跟车加速度最小值及本车期望跟车加速度最大值。
[0132]
3)建立目标函数:
[0133]
对于跟随性指标,取车间距误差和相对速度的矩阵二范数之和作为跟随性能指标,可表示为:
[0134]
j
t
=ω
δd
δd(k)2 ψ
δv
δv(k)2ꢀꢀꢀꢀ
(14)
[0135]
式(14)中,j
t
为跟随性能指标,ω
δd
为车间距误差的权重系数,ω
δv
为相对速度的权重系数。
[0136]
对于舒适性和经济性指标,可表示为:
[0137]
j
c
=ω
ah
a
h
(k)2 ω
δu
δu(k)2ꢀꢀ
(15)
[0138]
式(15)中,j
c
为舒适性和经济性性能指标,ω
ah
,ω
δu
分别为本车加速度、期望加速度增量的权重系数。
[0139]
把跟踪性能、安全性能、舒适性能指标加权求和得到综合性能指标函数j:
[0140]
式(16)中,t为积分时间。
[0141]
4)根据平稳跟车模式状态空间模型式(10)、综合性能指标函数式(16)及系统约束,基于线性二次最优控制理论,通过调节各个性能指标的权重,能够实现acc系统的多目标优化。在k时刻,寻求优化指标对应的最优期望纵向加速度。在下一个时刻,因为mpc控制器具有滚动优化特性,可重复上述过程,得到每一时刻对应的最优期望纵向加速度。
[0142]
s4:根据所述期望纵向加速度确定本车切换驱动或制动状态。
[0143]
1)预标定驱动制动切换曲线:
[0144]
根据车辆在标准载荷和路况下无驱动无制动状态下以不同速度滑行标定出不同车速对应的滑行加速度,以此曲线作为切换曲线,为了避免驱动制动的频繁切换,在切换曲线上方和下方添加宽度为δh的缓冲区域,切换曲线如图2所示;
[0145]
2)判定驱动制动状态:
[0146]
若期望加速度在切换曲线及缓冲区域上方,则acc系统进入驱动状态;
[0147]
若期望加速度在切换曲线及缓冲区域下方,则acc系统进入制动状态;
[0148]
若期望加速度在缓冲区域内,则acc系统保持原状态。
[0149]
s5:若本车为驱动状态,则将所述期望纵向加速度转变为对应的电机驱动力矩,完成对车辆的控制;若本车为制动状态,则将所述期望纵向加速度转变为对应的车辆制动力;完成对车辆的控制。
[0150]
本车为驱动状态时,所述电机驱动力矩计算方式如下:
[0151]
根据车辆逆纵向动力学模型,可得期望加速度与电机驱动力矩间存在如下关系:
[0152][0153]
式(17)中,t
motor
为电机驱动力矩,i0为传动系统传动比,η
t
为传动效率,r为车轮滚动半径,c
d
为空气阻力系数,a为迎风面积,θ为道路坡度角,m为整车质量,a为系统输出的期
望纵向加速度,v为纵向车速,f为滚动阻力系数,为行驶阻力。
[0154]
本车为制动状态时,所述车辆制动力计算方式如下:
[0155]
根据车辆逆纵向动力学模型,可得期望加速度与车辆制动力间存在如下关系:
[0156][0157]
式(18)中,f
b
为期望车辆制动力。c
d
为空气阻力系数,a为迎风面积,θ为道路坡度角,m为整车质量,a为系统输出的期望纵向加速度,v为纵向车速,f为滚动阻力系数。
[0158]
获得期望制动力后,制动控制器可根据制动力分配策略将期望制动力转化为制动压力和电机制动力矩,实现制动工况的减速控制。
[0159]
需要说明的是,各个模块按照流式布局进行排列,仅仅是本发明的一个实施例,也可以采用其他的方式排列,本发明对此不做限定。
[0160]
上述实施例的有益效果在于:
[0161]
第一、该控制方法无需对每辆车控制器增益系数进行参数标定,可通过算法实时输出期望纵向加速度,时效性强,在保证舒适性的前提下使车速尽快达到设定车速。
[0162]
第二、跟车巡航模式下,建立平稳跟车模式状态空间模型,综合性能指标函数综合考虑安全性、跟随性、舒适性以及经济性,优化调节各个性能指标的权重,实现车辆最优性能的期望纵向加速度。
[0163]
第三、输出的期望纵向加速度,与驱动制动切换曲线比较,确定制动和驱动的状态,再将期望纵向加速度转变为期望的电机驱动力矩或期望的制动力,完成对车辆的精确控制。
[0164]
图3为本发明实施例提供的一种纯电动客车自适应巡航纵向控制装置的结构框图,该装置包括:
[0165]
计算模块,所述计算模块用以获取本车车速及前车车速并计算安全车间距和紧急制动临界距离;
[0166]
模式判定模块,所述模式判定模块用以获取本车与前车距离并根据所述安全车间距和紧急制动临界距离判定本车处于定速巡航模式或跟车巡航模式;
[0167]
期望纵向加速度计算模块,所述期望纵向加速度计算模块用以若本车在定速巡航模式下,则基于pid控制计算定速巡航模式下的期望纵向加速度;若本车在跟车巡航模式下,则基于模型预测控制计算跟车巡航模式下的期望纵向加速度;
[0168]
状态切换模块,所述状态切换模块用以根据所述期望纵向加速度确定本车切换驱动或制动状态;
[0169]
转变模块,所述转变模块用以若本车为驱动状态,则将所述期望纵向加速度转变为对应的电机驱动力矩,完成对车辆的控制;若本车为制动状态,则将所述期望纵向加速度转变为对应的车辆制动力,完成对车辆的控制。
[0170]
图3实施例中各模块的功能与其对应的方法实施例中的内容相对应,在此不再赘述。
[0171]
图4示出了本发明实施例提供的电子设备40的结构示意图,电子设备40包括至少
一个处理器401(例如cpu),至少一个输入输出接口404,存储器402,和至少一个通信总线403,用于实现这些部件之间的连接通信。至少一个处理器401用于执行存储器402中存储的计算机指令,以使所述至少一个处理器401能够执行前述纯电动客车自适应巡航纵向控制方法的实施例。存储器402为非暂态存储器(non
‑
transitory memory),其可以包含易失性存储器,例如高速随机存取存储器(ram:random access memory),也可以包括非易失性存储器(non
‑
volatile memory),例如至少一个磁盘存储器。通过至少一个输入输出接口404(可以是有线或者无线通信接口)实现与至少一个其他设备或单元之间的通信连接。
[0172]
在一些实施方式中,存储器402存储了程序4021,处理器401执行程序4021,用于执行前述任一分表方法实施例中的内容。
[0173]
该电子设备可以以多种形式存在,包括但不限于:
[0174]
(1)移动通信设备:这类设备的特点是具备移动通信功能,并且以提供话音、数据通信为主要目标。这类终端包括:智能手机(例如iphone)、多媒体手机、功能性手机,以及低端手机等。
[0175]
(2)超移动个人计算机设备:这类设备属于个人计算机的范畴,有计算和处理功能,一般也具备移动上网特性。这类终端包括:pda、mid和umpc设备等,例如ipad。
[0176]
(3)便携式娱乐设备:这类设备可以显示和播放多媒体内容。该类设备包括:音频、视频播放器(例如ipod),掌上游戏机,电子书,以及智能玩具和便携式车载导航设备。
[0177]
(4)特定服务器:提供计算服务的设备,服务器的构成包括处理器、硬盘、内存、系统总线等,服务器和通用的计算机架构类似,但是由于需要提供高可靠的服务,因此在处理能力、稳定性、可靠性、安全性、可扩展性、可管理性等方面要求较高。
[0178]
(5)其他具有数据交互功能的电子设备。
[0179]
本说明书中的各个实施例均采用相关的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
[0180]
尤其,对于装置实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
[0181]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。