1.本发明涉及计算机技术领域,具体而言涉及一种人脸识别方法及系统。
背景技术:
2.人脸识别,是基于人的脸部特征信息进行身份识别的一种生物识别技术。用摄像机或摄像头采集含有人脸的图像或视频流,并自动在图像中检测和跟踪人脸,进而对检测到的人脸进行识别的一系列相关技术,通常也叫做人像识别、面部识别。人脸识别主要用于身份识别,由于视频监控正在快速普及,众多的视频监控应用迫切需要一种远距离、用户非配合状态下的快速身份识别技术,以求远距离快速确认人员身份,实现智能预警。人脸识别技术无疑人脸识别主要用于身份识别。广泛应用于金融、教育、医疗等领域。
3.目前,人脸识别方法主要是通过提取人脸图像中的某种特征,然后基于这种特征识别人脸,例如基于人脸纹理特征识别人脸。然而,人脸的独特性是多种特征综合起来表现的,仅仅依赖于一种特征识别人脸的准确性必然不够,或者仅仅依赖于一种特征识别人脸需要进行复杂的计算才能得到足够准确的识别结果。
技术实现要素:
4.本发明的目的在于提供了一种人脸识别方法及系统,用以解决上述存在的问题。
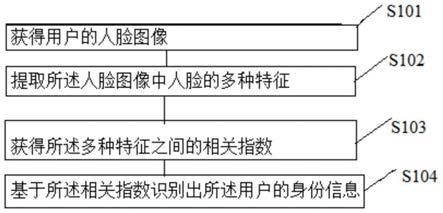
5.第一方面,本发明实施例提供了一种人脸识别方法,所述方法包括:获得用户的人脸图像,所述人脸图像中包含人脸;提取所述人脸图像中人脸的多种特征;获得所述多种特征之间的相关指数;所述相关指数表征各个特征之间的相互呼应的程度;基于所述相关指数识别出所述用户的身份信息。
6.可选的,所述多种特征包括轮廓特征、纹理特征、几何特征和灰度特征; 所述相关指数包括所述轮廓特征与所述几何特征的第一相关指数、所述轮廓特征与所述灰度特征之间的第二相关指数和所述几何特征与所述灰度特征之间的第三相关指数;所述第一相关指数表征所述轮廓特征与所述几何特征之间相互呼应的程度;所述第二相关指数表征所述轮廓特征与所述灰度特征之间相互呼应的程度;所述第三相关指数表征所述几何特征与所述灰度特征之间相互呼应的程度;所述轮廓特征中包含多个轮廓特征点,所述纹理特征中包含多个纹理特征点,所述几何特征中包含多个几个特征点,所述灰度特征中包含多个特征点的特征像素值;获得所述多种特征之间的相关指数包括:获得所述轮廓特征与所述几何特征的第一相关指数;具体为:对所述轮廓特征中的轮廓特征点和所述纹理特征中的纹理特征点进行匹配,相互匹配成功的轮廓特征点和纹理特征点构成轮纹点对,以相互匹配成功的轮廓特征点和纹理特征点之间的欧拉距离作为所述轮纹点对的呼应值;所述轮廓特征和所述纹理特征中存在
多对相互匹配的相互匹配成功的轮廓特征点和纹理特征点,即存在多个轮纹点对;每个轮纹点对对应一个呼应值;所述呼应值表示所述相互匹配成功的轮廓特征点和纹理特征点之间相互呼应的程度;以所述呼应值的方差作为所述第一相关指数。
7.可选的,所述获得所述多种特征之间的相关指数还包括:获得所述轮廓特征与所述灰度特征之间的第二相关指数,具体为:展开所述轮廓特征,得到仅有一首一尾的轮廓线;将所述灰度特征映射到所述轮廓线上,得到轮廓灰度特征;所述轮廓灰度特征中,轮廓线上的每个轮廓特征点对应一个或者多个特征像素值;获得每个轮廓特征点对应的特征像素值之和,得到所述轮廓特征点的灰度特征值;以中心轮廓特征点为基准,将所述轮廓线进行对折处理,得到第一子轮廓线和第二子轮廓线;第一子轮廓线包括第一轮廓特征点,第二子轮廓线包括第二轮廓特征点;第一子轮廓线中的第一轮廓特征点和第二子轮廓线中的第二轮廓特征点以中心轮廓特征点为基准一一对应;获得相互对应的第一轮廓特征点和第二轮廓特征点的灰度特征值的轮廓灰度差值;多对相互对应的第一轮廓特征点和第二轮廓特征点对应获得多个灰度特征值的轮廓灰度差值;以所有轮廓灰度差值的方差作为所述第二相关指数。
8.可选的,获得所述多种特征之间的相关指数还包括:获得所述几何特征与所述灰度特征之间的第三相关指数,具体为:将所述几何特征展开,得到仅有一首一尾的几何线;将所述灰度特征映射到所述几何线上,得到几何灰度特征;所述几何灰度特征中,几何线上的每个几何特征点对应一个或者多个几何像素值;获得每个几何特征点对应的几何像素值之和,得到所述几何特征点的几何特征值;以中心几何特征点为基准,将所述几何线进行对折处理,得到第一子几何和第二子几何线;第一子几何线包括第一轮几何征点,第二子几何线包括第二几何特征点;第一子几何线中的第一轮几何征点和第二子几何线中的第二几何特征点以中心几何特征点为基准一一对应;获得相互对应的第一几何特征点和第二几何特征点的几何特征值的几何灰度差值;多对相互对应的第一几何特征点和第二几何特征点对应获得多个几何特征值的几何灰度差值;以所有几何灰度差值的方差作为所述第三相关指数。
9.可选的,基于所述相关指数识别出所述用户的身份信息,识别出所述用户的身份信息,包括:若所述第一相关指数满足第一条件、第二相关指数满足第二条件且第三相关指数满足第三条件,对所述第一相关指数、第二相关指数和所述第三相关指数进行加权求和,得到所述用户的身份特征码;
从数据库中获得与所述身份特征码对应的身份信息作为所述用户的身份信息。
10.第二方面,本发明实施例体提供了一种人脸识别系统,所述系统包括:获得模块,用于获得用户的人脸图像,所述人脸图像中包含人脸;提取模块,用于提取所述人脸图像中人脸的多种特征;识别模块,用于获得所述多种特征之间的相关指数;所述相关指数表征各个特征之间的相互呼应的程度;基于所述相关指数识别出所述用户的身份信息。
11.可选的,所述多种特征包括轮廓特征、纹理特征、几何特征和灰度特征; 所述相关指数包括所述轮廓特征与所述几何特征的第一相关指数、所述轮廓特征与所述灰度特征之间的第二相关指数和所述几何特征与所述灰度特征之间的第三相关指数;所述第一相关指数表征所述轮廓特征与所述几何特征之间相互呼应的程度;所述第二相关指数表征所述轮廓特征与所述灰度特征之间相互呼应的程度;所述第三相关指数表征所述几何特征与所述灰度特征之间相互呼应的程度;所述轮廓特征中包含多个轮廓特征点,所述纹理特征中包含多个纹理特征点,所述几何特征中包含多个几个特征点,所述灰度特征中包含多个特征点的特征像素值;获得所述多种特征之间的相关指数包括:获得所述轮廓特征与所述几何特征的第一相关指数;具体为:对所述轮廓特征中的轮廓特征点和所述纹理特征中的纹理特征点进行匹配,相互匹配成功的轮廓特征点和纹理特征点构成轮纹点对,以相互匹配成功的轮廓特征点和纹理特征点之间的欧拉距离作为所述轮纹点对的呼应值;所述轮廓特征和所述纹理特征中存在多对相互匹配的相互匹配成功的轮廓特征点和纹理特征点,即存在多个轮纹点对;每个轮纹点对对应一个呼应值;所述呼应值表示所述相互匹配成功的轮廓特征点和纹理特征点之间相互呼应的程度;以所述呼应值的方差作为所述第一相关指数。
12.可选的,所述获得所述多种特征之间的相关指数还包括:获得所述轮廓特征与所述灰度特征之间的第二相关指数,具体为:展开所述轮廓特征,得到仅有一首一尾的轮廓线;将所述灰度特征映射到所述轮廓线上,得到轮廓灰度特征;所述轮廓灰度特征中,轮廓线上的每个轮廓特征点对应一个或者多个特征像素值;获得每个轮廓特征点对应的特征像素值之和,得到所述轮廓特征点的灰度特征值;以中心轮廓特征点为基准,将所述轮廓线进行对折处理,得到第一子轮廓线和第二子轮廓线;第一子轮廓线包括第一轮廓特征点,第二子轮廓线包括第二轮廓特征点;第一子轮廓线中的第一轮廓特征点和第二子轮廓线中的第二轮廓特征点以中心轮廓特征点为基准一一对应;获得相互对应的第一轮廓特征点和第二轮廓特征点的灰度特征值的轮廓灰度差值;多对相互对应的第一轮廓特征点和第二轮廓特征点对应获得多个灰度特征值的轮廓灰度差值;以所有轮廓灰度差值的方差作为所述第二相关指数。
13.可选的,获得所述多种特征之间的相关指数还包括:获得所述几何特征与所述灰
度特征之间的第三相关指数,具体为:将所述几何特征展开,得到仅有一首一尾的几何线;将所述灰度特征映射到所述几何线上,得到几何灰度特征;所述几何灰度特征中,几何线上的每个几何特征点对应一个或者多个几何像素值;获得每个几何特征点对应的几何像素值之和,得到所述几何特征点的几何特征值;以中心几何特征点为基准,将所述几何线进行对折处理,得到第一子几何和第二子几何线;第一子几何线包括第一轮几何征点,第二子几何线包括第二几何特征点;第一子几何线中的第一轮几何征点和第二子几何线中的第二几何特征点以中心几何特征点为基准一一对应;获得相互对应的第一几何特征点和第二几何特征点的几何特征值的几何灰度差值;多对相互对应的第一几何特征点和第二几何特征点对应获得多个几何特征值的几何灰度差值;以所有几何灰度差值的方差作为所述第三相关指数。
14.可选的,基于所述相关指数识别出所述用户的身份信息,识别出所述用户的身份信息,包括:若所述第一相关指数满足第一条件、第二相关指数满足第二条件且第三相关指数满足第三条件,对所述第一相关指数、第二相关指数和所述第三相关指数进行加权求和,得到所述用户的身份特征码;从数据库中获得与所述身份特征码对应的身份信息作为所述用户的身份信息。
15.相较于现有技术,本发明实施例达到了以下有益效果:本发明实施例提供了一种人脸识别方法及系统,通过获得用户的人脸图像,所述人脸图像中包含人脸;提取所述人脸图像中的人脸的多种特征;获得所述多种特征之间的相关指数;所述相关指数表征各个特征之间的相互呼应的程度;基于所述相关指数识别出所述用户的身份信息。因为人脸的独特性是多种特征综合起来表现的,为此,提取出人脸图像中的人脸的多种特征,并依赖于多种人脸的特征识别人脸,提高了人脸识别的准确性。另一方面,人脸的各个维度的特征之间是存在相互影响、相互呼应的特性的,为此,通过获得表征各个特征之间的相互呼应的程度的相关指数,并依据相关指数识别用户的身份信息,可以提高人脸识别的准确性和智能化程度,另外,以相关指数刻画各个特征之间的相互呼应的程度,将感官上的信息数字化,提高了智能人脸识别的仿真程度,可以使得人脸识别准确模仿人类识别用户,从而给人工智能的进步提供了进一步发展的技术启示。
附图说明
16.图1是本发明实施例提供的一种人脸识别方法流程图。
17.图2是本发明实施例提供的一种电子设备的方框结构示意图。
18.图中标记:总线500;接收器501;处理器502;发送器503;存储器504;总线接口505。
具体实施方式
19.下面结合附图,对本发明作详细的说明。
实施例
20.本发明实施例提供的一种人脸识别方法,如图1所示,所述方法包括:s101:获得用户的人脸图像。
21.其中,所述人脸图像中包含人脸。可以包括整张人脸,也可以包括部分人脸,例如仅仅包括眼睛、鼻子、嘴巴中的一个或者多个。
22.s102:提取所述人脸图像中人脸的多种特征。
23.需要说明的是,人脸图像是彩色图像。彩色图像中包含多种信息,例如纹理、轮廓、色彩、灰度等特性信息,多种特征可以是从这些特性信息中提取出来的能够具有代表性的、独特性的信息。
24.s103:获得所述多种特征之间的相关指数。
25.其中,所述相关指数表征各个特征之间的相互呼应的程度。例如,眼角下垂的人,其眼角与太阳穴边上的发际线的距离要比眼角不下垂时候园,且对应的,眼角下垂以后,其眉毛与发际线的距离也相对应的有不同,这种不同体现在对应关系上。
26.s104:基于所述相关指数识别出所述用户的身份信息。
27.通过采用以上方案,通过获得用户的人脸图像,所述人脸图像中包含人脸;提取所述人脸图像中的人脸的多种特征;获得所述多种特征之间的相关指数;所述相关指数表征各个特征之间的相互呼应的程度;基于所述相关指数识别出所述用户的身份信息。因为人脸的独特性是多种特征综合起来表现的,为此,提取出人脸图像中的人脸的多种特征,并依赖于多种人脸的特征识别人脸,提高了人脸识别的准确性。另一方面,人脸的各个维度的特征之间是存在相互影响、相互呼应的特性的,为此,通过获得表征各个特征之间的相互呼应的程度的相关指数,并依据相关指数识别用户的身份信息,可以提高人脸识别的准确性和智能化程度,另外,以相关指数刻画各个特征之间的相互呼应的程度,将感官上的信息数字化,提高了智能人脸识别的仿真程度,可以使得人脸识别准确模仿人类识别用户,从而给人工智能的进步提供了进一步发展的技术启示。
28.可选的,所述多种特征包括轮廓特征、纹理特征、几何特征和灰度特征,所述轮廓特征表征部分人脸的外部轮廓的特征,几何特征指的是所述部分人脸中包含的眼睛、嘴巴、鼻子、耳朵中的多个的特征点构成之间的几何关系;所述纹理特征表征所述部分人脸中的纹理信息;所述灰度特征指的是所述部分人脸中的灰度信息。在此基础上,所述相关指数包括所述轮廓特征与所述几何特征的第一相关指数、所述轮廓特征与所述灰度特征之间的第二相关指数和所述几何特征与所述灰度特征之间的第三相关指数;所述第一相关指数表征所述轮廓特征与所述几何特征之间相互呼应的程度;所述第二相关指数表征所述轮廓特征与所述灰度特征之间相互呼应的程度;所述第三相关指数表征所述几何特征与所述灰度特征之间相互呼应的程度;所述轮廓特征中包含多个轮廓特征点,所述纹理特征中包含多个纹理特征点,所述几何特征中包含多个几个特征点,所述灰度特征中包含多个特征点的特征像素值;获得所述多种特征之间的相关指数包括:获得所述轮廓特征与所述几何特征的第一相关指数;具体为:对所述轮廓特征中的轮廓特征点和所述纹理特征中的纹理特征点进行匹配,相互匹配成功的轮廓特征点和纹理特征点构成轮纹点对,以相互匹配成功的轮廓特征点和纹理
特征点之间的欧拉距离作为所述轮纹点对的呼应值;所述轮廓特征和所述纹理特征中存在多对相互匹配的相互匹配成功的轮廓特征点和纹理特征点,即存在多个轮纹点对;每个轮纹点对对应一个呼应值;所述呼应值表示所述相互匹配成功的轮廓特征点和纹理特征点之间相互呼应的程度;以所述呼应值的方差作为所述第一相关指数。
29.其中,对所述轮廓特征中的轮廓特征点和所述纹理特征中的纹理特征点进行匹配具体为:获得轮廓特征点与纹理特征点的欧拉距离,确定欧拉距离最短的轮廓特征点和纹理特征点匹配成功,组成轮纹点对。
30.所述获得所述多种特征之间的相关指数还包括:获得所述轮廓特征与所述灰度特征之间的第二相关指数,具体为:展开所述轮廓特征,得到仅有一首一尾的轮廓线。其中,轮廓特征包括人脸轮廓和轮廓特征点,轮廓特征点处在轮廓中,展开所述轮廓特征具体为,将人脸轮廓展开成仅有一首一尾的轮廓线,此时,轮廓特征点处在轮廓线中。
31.将所述灰度特征映射到所述轮廓线上,得到轮廓灰度特征;所述轮廓灰度特征中,轮廓线上的每个轮廓特征点对应一个或者多个特征像素值;将所述灰度特征映射到所述轮廓线上,得到轮廓灰度特征具体为:在人脸图像中的人脸中,将轮廓内的人脸的像素点的像素值转化成灰度值,然后从轮廓框住的区域的重心为基准,获得与中心最近的像素点作为待映射点,然后将待映射点映射到与待映射点距离最近的轮廓特征点中。以此类推,直到轮廓框住的区域内的所有像素点都映射到与其相应的轮廓特征点中。如此,就完成了灰度特征映射到所述轮廓线上。如此,特征像素值就是映射到轮廓特征点上的待映射点的灰度值,可以有一个或者多个。
32.获得每个轮廓特征点对应的特征像素值之和,得到所述轮廓特征点的灰度特征值。例如,轮廓特征点a对应3个待映射点a、b、c,那么轮廓特征点a对应的特征像素值之和为点a、b、c的灰度值之和。
33.以中心轮廓特征点为基准,将所述轮廓线进行对折处理,得到第一子轮廓线和第二子轮廓线;第一子轮廓线包括第一轮廓特征点,第二子轮廓线包括第二轮廓特征点;第一子轮廓线中的第一轮廓特征点和第二子轮廓线中的第二轮廓特征点以中心轮廓特征点为基准一一对应;中心轮廓特征点为轮廓线的中点。例如,轮廓线中包含的轮廓特征点分别是a1、a2、a3、a4、a5,那么中心轮廓特征点为a3,以a3为基准对折轮廓线后,a2与a4对应,a1与a5对应。
34.获得相互对应的第一轮廓特征点和第二轮廓特征点的灰度特征值的轮廓灰度差值;多对相互对应的第一轮廓特征点和第二轮廓特征点对应获得多个灰度特征值的轮廓灰度差值。以上述例子为基础,获得相互对应的第一轮廓特征点和第二轮廓特征点的灰度特征值的轮廓灰度差值具体为:轮廓灰度差c1= a2
‑
a4,轮廓灰度差c2= a1
‑
a5。
35.以所有轮廓灰度差值的方差作为所述第二相关指数。即第二相关指数等于c1、c2的方差。
36.可选的,获得所述多种特征之间的相关指数还包括:获得所述几何特征与所述灰度特征之间的第三相关指数,具体为:将所述几何特征展开,得到仅有一首一尾的几何线;几何线中包括多个几何特征
点,将所述几何特征展开具体为:随机打断任意两个几何特征点之间的连线,以最先打断连线的两个几何特征点作为首特征点和尾特征点,以此为基础,继续打断该首特征点、尾特征点与其他几何特征点之间的连线,直到仅有一个其他的几何特征点与首特征点有联系,以及另外一个几何特征点与尾特征点有连线,然后,对于其他的任何一个几何特征点,仅仅保留两根连线,最后,所有的几何特征点连线构成几何线。
37.将所述灰度特征映射到所述几何线上,得到几何灰度特征;所述几何灰度特征中,几何线上的每个几何特征点对应一个或者多个几何像素值;具体的,获得在人脸图像中最短的几何特征点的连线的长度,以最短的几何特征点的连线的长度的一半作为映射半径,将在人脸图像中与几何特征点为中心以映射半径为半径的范围内的所有像素点映射到所述几何特征点上。在此之前,将人脸图像中的所有像素点的像素值转化成灰度值。那么,几何像素值就是所述几何特征点对应的像素点的灰度值,可以有一个或者多个。
38.获得每个几何特征点对应的几何像素值之和,得到所述几何特征点的几何特征值;例如,对于几何特征值g,映射到几何特征值g上的像素点有d、e,那么该几何特征点的几何特征值等于像素点d、e的像素值之和。
39.以中心几何特征点为基准,将所述几何线进行对折处理,得到第一子几何和第二子几何线;第一子几何线包括第一轮几何征点,第二子几何线包括第二几何特征点;第一子几何线中的第一轮几何征点和第二子几何线中的第二几何特征点以中心几何特征点为基准一一对应;几何线的中心几何特征点为几何线的中点,例如几何线中包括g1、g2、g3、g4、g5、g6,那么中心几何特征点为g3,对折后的对应关系为:g3对应g4。g2对应g5,g1对应g6。
40.获得相互对应的第一几何特征点和第二几何特征点的几何特征值的几何灰度差值;多对相互对应的第一几何特征点和第二几何特征点对应获得多个几何特征值的几何灰度差值;以上述例子为例,几何灰度差值f1= g3
‑
g4,f2= g2
‑
g5,f1= g1
‑
g6。
41.以所有几何灰度差值的方差作为所述第三相关指数。第三相关指数为f1、f2和f3的方差。
42.可选的,基于所述相关指数识别出所述用户的身份信息,识别出所述用户的身份信息,包括:若所述第一相关指数满足第一条件、第二相关指数满足第二条件且第三相关指数满足第三条件,对所述第一相关指数、第二相关指数和所述第三相关指数进行加权求和,得到所述用户的身份特征码;具体的,若第一相关指数的取值在5
‑
10个像素的距离的范围内,且第二相关指数的取值在0.5
‑
10的范围内,且第三相关指数的取值在0.6
‑
12的范围内,对所述第一相关指数、第二相关指数和所述第三相关指数进行加权求和,得到所述用户的身份特征码。然后从数据库中获得与所述身份特征码对应的身份信息作为所述用户的身份信息。
43.针对上述实施例提供一种人脸识别方法,本技术实施例还对应提供一种用于执行上述的步骤的执行主体,该执行主体可以为人脸识别系统。人脸识别系统包括:获得模块,用于获得用户的人脸图像,所述人脸图像中包含人脸;提取模块,用于提取所述人脸图像中的人脸的多种特征;识别模块,用于获得所述多种特征之间的相关指数;所述相关指数表征各个特征之间的相互呼应的程度;基于所述相关指数识别出所述用户的身份信息。
44.可选的,所述多种特征包括轮廓特征、纹理特征、几何特征和灰度特征; 所述相关
指数包括所述轮廓特征与所述几何特征的第一相关指数、所述轮廓特征与所述灰度特征之间的第二相关指数和所述几何特征与所述灰度特征之间的第三相关指数;所述第一相关指数表征所述轮廓特征与所述几何特征之间相互呼应的程度;所述第二相关指数表征所述轮廓特征与所述灰度特征之间相互呼应的程度;所述第三相关指数表征所述几何特征与所述灰度特征之间相互呼应的程度;所述轮廓特征中包含多个轮廓特征点,所述纹理特征中包含多个纹理特征点,所述几何特征中包含多个几个特征点,所述灰度特征中包含多个特征点的特征像素值;获得所述多种特征之间的相关指数包括:获得所述轮廓特征与所述几何特征的第一相关指数;具体为:对所述轮廓特征中的轮廓特征点和所述纹理特征中的纹理特征点进行匹配,相互匹配成功的轮廓特征点和纹理特征点构成轮纹点对,以相互匹配成功的轮廓特征点和纹理特征点之间的欧拉距离作为所述轮纹点对的呼应值;所述轮廓特征和所述纹理特征中存在多对相互匹配的相互匹配成功的轮廓特征点和纹理特征点,即存在多个轮纹点对;每个轮纹点对对应一个呼应值;所述呼应值表示所述相互匹配成功的轮廓特征点和纹理特征点之间相互呼应的程度;以所述呼应值的方差作为所述第一相关指数。
45.可选的,所述获得所述多种特征之间的相关指数还包括:获得所述轮廓特征与所述灰度特征之间的第二相关指数,具体为:展开所述轮廓特征,得到仅有一首一尾的轮廓线;将所述灰度特征映射到所述轮廓线上,得到轮廓灰度特征;所述轮廓灰度特征中,轮廓线上的每个轮廓特征点对应一个或者多个特征像素值;获得每个轮廓特征点对应的特征像素值之和,得到所述轮廓特征点的灰度特征值;以中心轮廓特征点为基准,将所述轮廓线进行对折处理,得到第一子轮廓线和第二子轮廓线;第一子轮廓线包括第一轮廓特征点,第二子轮廓线包括第二轮廓特征点;第一子轮廓线中的第一轮廓特征点和第二子轮廓线中的第二轮廓特征点以中心轮廓特征点为基准一一对应;获得相互对应的第一轮廓特征点和第二轮廓特征点的灰度特征值的轮廓灰度差值;多对相互对应的第一轮廓特征点和第二轮廓特征点对应获得多个灰度特征值的轮廓灰度差值;以所有轮廓灰度差值的方差作为所述第二相关指数。
46.可选的,获得所述多种特征之间的相关指数还包括:获得所述几何特征与所述灰度特征之间的第三相关指数,具体为:将所述几何特征展开,得到仅有一首一尾的几何线;将所述灰度特征映射到所述几何线上,得到几何灰度特征;所述几何灰度特征中,几何线上的每个几何特征点对应一个或者多个几何像素值;获得每个几何特征点对应的几何像素值之和,得到所述几何特征点的几何特征值;以中心几何特征点为基准,将所述几何线进行对折处理,得到第一子几何和第二
子几何线;第一子几何线包括第一轮几何征点,第二子几何线包括第二几何特征点;第一子几何线中的第一轮几何征点和第二子几何线中的第二几何特征点以中心几何特征点为基准一一对应;获得相互对应的第一几何特征点和第二几何特征点的几何特征值的几何灰度差值;多对相互对应的第一几何特征点和第二几何特征点对应获得多个几何特征值的几何灰度差值;以所有几何灰度差值的方差作为所述第三相关指数。
47.可选的,基于所述相关指数识别出所述用户的身份信息,识别出所述用户的身份信息,包括:若所述第一相关指数满足第一条件、第二相关指数满足第二条件且第三相关指数满足第三条件,对所述第一相关指数、第二相关指数和所述第三相关指数进行加权求和,得到所述用户的身份特征码;从数据库中获得与所述身份特征码对应的身份信息作为所述用户的身份信息。
48.关于上述实施例中的系统,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
49.本发明实施例还提供了一种电子设备,如图2所示,包括存储器504、处理器502及存储在存储器504上并可在处理器502上运行的计算机程序,所述处理器502执行所述程序时实现前文所述人脸识别方法的任一方法的步骤。
50.其中,在图2中,总线架构(用总线500来代表),总线500可以包括任意数量的互联的总线和桥,总线500将包括由处理器502代表的一个或多个处理器和存储器504代表的存储器的各种电路链接在一起。总线500还可以将诸如外围设备、稳压器和功率管理电路等之类的各种其他电路链接在一起,这些都是本领域所公知的,因此,本文不再对其进进一步描述。总线接口505在总线500和接收器501和发送器503之间提供接口。接收器501和发送器503可以是同一个元件,即收发机,提供用于在传输介质上与各种其他装置通信的单元。处理器502负责管理总线500和通常的处理,而存储器504可以被用于存储处理器502在执行操作时所使用的数据。
51.在本发明实施例中,人脸识别系统安装在机器人中,具体的可以软件功能模块的形式存储在存储器中并可以被处理器处理运行。
52.在此提供的算法和显示不与任何特定计算机、虚拟系统或者其它设备固有相关。各种通用系统也可以与基于在此的示教一起使用。根据上面的描述,构造这类系统所要求的结构是显而易见的。此外,本发明也不针对任何特定编程语言。应当明白,可以利用各种编程语言实现在此描述的本发明的内容,并且上面对特定语言所做的描述是为了披露本发明的最佳实施方式。
53.在此处所提供的说明书中,说明了大量具体细节。然而,能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
54.类似地,应当理解,为了精简本公开并帮助理解各个发明方面中的一个或多个,在上面对本发明的示例性实施例的描述中,本发明的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。然而,并不应将该公开的方法解释成反映如下意图:即所要求保
护的本发明要求比在每个权利要求中所明确记载的特征更多的特征。更确切地说,如下面的权利要求书所反映的那样,发明方面在于少于前面公开的单个实施例的所有特征。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本发明的单独实施例。
55.本领域那些技术人员可以理解,可以对实施例中的设备中的模块进行自适应性地改变并且把它们设置在与该实施例不同的一个或多个设备中。可以把实施例中的模块或单元或组件组合成一个模块或单元或组件,以及此外可以把它们分成多个子模块或子单元或子组件。除了这样的特征和/或过程或者单元中的至少一些是相互排斥之外,可以采用任何组合对本说明书(包括伴随的权利要求、摘要和附图)中公开的所有特征以及如此公开的任何方法或者设备的所有过程或单元进行组合。除非另外明确陈述,本说明书(包括伴随的权利要求、摘要和附图)中公开的每个特征可以由提供相同、等同或相似目的的替代特征来代替。
56.此外,本领域的技术人员能够理解,尽管在此的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本发明的范围之内并且形成不同的实施例。例如,在下面的权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。
57.本发明的各个部件实施例可以以硬件实现,或者以在一个或者多个处理器上运行的软件模块实现,或者以它们的组合实现。本领域的技术人员应当理解,可以在实践中使用微处理器或者数字信号处理器(dsp)来实现根据本发明实施例的装置中的一些或者全部部件的一些或者全部功能。本发明还可以实现为用于执行这里所描述的方法的一部分或者全部的设备或者装置程序(例如,计算机程序和计算机程序产品)。这样的实现本发明的程序可以存储在计算机可读介质上,或者可以具有一个或者多个信号的形式。这样的信号可以从因特网网站上下载得到,或者在载体信号上提供,或者以任何其他形式提供。
58.应该注意的是上述实施例对本发明进行说明而不是对本发明进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的元件或步骤。位于元件之前的单词“一”或“一个”不排除存在多个这样的元件。本发明可以借助于包括有若干不同元件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不表示任何顺序。可将这些单词解释为名称。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。