1.本发明涉及内窥镜领域,尤其涉及一种气动三维扫描内窥探头及其扫描方法。
背景技术:
2.通常内窥镜的成像大都采用二维成像技术,形成的成像画面是二维画面,画质不佳且由于人的视觉属于三维视角,在看到二维成像的画面时,对二维的成像还要进行三维的构想才能形成对观察处有效的判断。而这往往会消耗使用者的时间,降低工作效率,并且由于存在人为因素的影响,也会大大增加使用者的判断能力,进而影响判断效果和执行结果。
3.光声成像是近些年来发展起来的一种非入侵式和非电离式的新型生物医学成像方法。目前,采用光声成像技术基本都能形成三维扫描成像。实现三维扫描成像一般会将扫描的方向分为环向和沿探头轴线的方向,在这两个方向分别设置相应的机械作动结构来进行控制,并将两种运动结合实现三维扫描成像。大多数的机械结构需要通过外界提供能源来支撑其作动,消耗资源,并且由于机械结构占据的空间较大,会影响探头的尺寸。此外,由于机械结构运动带来的不稳定性问题,会对激光束的轨迹产生偏移,进而影响三维扫描成像的效果。
4.因此,设计一种三维扫描成像的探头,能够在实现三维扫描的同时,降低能耗,减小驱动结构的不稳定性带来的影响,是目前亟待解决的问题。
技术实现要素:
5.本发明的目的是提供一种气动三维扫描内窥探头,用于解决上述技术问题。
6.本发明的创新点在于反光镜的变角度和转动两种运动均不使用机械驱动机构,且通过直接向气动腔室中充入气体这一次性过程即能同时实现,整体上节约了能耗,也避免了适用机械驱动机构带来的不稳定性影响。
7.为实现上述发明目的,本发明的技术方案是:一种气动三维扫描内窥探头,包括壳体、光纤、光纤轴承、气动安装头、超声换能器、准直透镜、变角度反射装置、气动机构;光纤轴承、光纤、气动安装头、超声换能器、准直透镜、变角度反射装置以及气动机构均位于壳体中;光纤轴承和气动安装头均与壳体同轴设置;气动安装头上开设有安装孔;光纤穿过光纤轴承后设置于安装孔中;超声换能器套设于气动安装头上;准直透镜位于气动安装头上远离光纤轴承的一侧,且准直透镜嵌设于气动安装头上;气动机构设置于壳体的端头,且气动机构中空形成气室;气动机构的侧壁上开设有进气孔和排气孔;变角度反射装置通过转动轴与气动机构转动连接,且转动轴同时穿过进气孔和排气孔;转动轴上位于进气孔和排气孔处设置有气动转子;气动安装头、壳体以及准直透镜形成气动腔室;气动安装头和光纤轴承均沿壳体的轴线开设有气动孔;气动孔与气动腔室联通;变角度反射装置的反射镜一端与转动轴铰接。
8.上述实现的过程中,变角度反射装置绕壳体轴线转动形成环向的扫描,是通过向
气动腔室中充入气体,使气体经气动机构的进气孔吹动转动轴上的气动转子进而带动转动轴转动实现的。采用气压差的方式来产生转动力,可以减少使用机械驱动结构,降低能耗的同时,也避免了机械驱动机构运动所产生的不稳定性影响扫描结构的情况。利用气动腔室与变角度反射装置内部之间的压差来使反射镜发生角度变化,进而实现沿壳体轴线方向的扫描。环向扫描与沿壳体轴线方向的扫描能够建立起三维立体成像机制,形成三维成像。反光镜的变角度和转动两种运动均不使用机械驱动机构,且通过直接向气动腔室中充入气体这一次性过程即能同时实现,整体上节约了能耗,也避免了适用机械驱动机构带来的不稳定性影响。
9.作为优选,气动安装头包括固定底座、环形凸壁以及凸缘;环形凸壁与固定底座同轴设置,且环形凸壁位于环形底座上远离光纤轴承的一侧;环形凸壁的一端与固定底座连接,另一端与凸缘连接;固定底座、环形凸壁、凸缘以及壳体形成容置腔;超声换能器套设在环形凸壁上,且位于容置腔中;固定底座上开设有安装孔;环形凸壁的内部上绕轴线开设有固定环槽;准直透镜嵌设于固定环槽中;气动孔沿环形凸壁的轴线穿过固定底座和环形凸壁。
10.上述实现的过程中,固定底座起到固定光纤,稳定激光束射出角度的作用。环形凸壁形一方面形成准直透镜与光纤之间的射光区域,另一方面结合凸缘形成固定超声换能器的容置腔。环形凸壁的尺寸也在一定程度上影响扫描的区域大小。
11.作为优选,气动机构包括座体、固定轴承、单向进气阀以及单向排气阀;座体的一端与壳体的端头连接;座体中空形成气室;座体的侧壁上沿壳体的轴线开设有转动孔和轴承固定孔;转动轴设置于转动孔中,且通过固定设置在轴承固定孔中的固定轴承实现与座体的转动连接;侧壁上开设有进气孔和排气孔;单向进气阀设置于进气孔中;单向排气阀设置于排气孔中;进气孔与排气孔均与转动孔联通。
12.上述实现的过程中,气动机构是实现变角度反射装置转动的重要结构,气动转子同时位于排气孔和进气孔中,能够在气体经过进气孔进入气室和气体经过排气孔排出气室这两个过程中产生推动了推动气动转子进而带动转动轴转动,实现环形方向的扫描。一次充气的过程能够完成两侧转动扫描,保证了扫描了频率,相比机械驱动机构的一个扫描周期,能够获取多一倍的数据,为成像提供更多的数据,大大提高三维成像的效果。气室空间大小也可以根据扫描周期需要来确定,能够高效的保证扫描的数据结果的质与量。
13.作为优选,变角度反射装置包括反射镜、弹性回复机构、转动轴以及弧形导向头;反射镜的一端与转动轴的端头转动连接,另一端位于弧形导向头上;反射镜上靠近转动轴的一侧设置有弹性回复机构,且弹性回复机构的一端抵持反射镜,另一端与转动轴连接。
14.上述实现的过程中,反射镜通过绕铰接端转动来实现反射光束的角度变化,进而完成沿壳体轴线方向的扫描,这种变角度的方式连续性强,且还能通过调整气体压力的变化速率来控制角度变化的速率。满足扫描速率和范围的需求。
15.作为优选,单向进气阀的通气阈值不大于弹性回复机构的初始弹性力。
16.上述实现的过程中,进气阀在反射镜发生角度变化前通气实现转动,能够保证反射镜是在转动的过程中进行角度变化,实现整个环形方向上沿壳体轴线方向的扫描,避免了断层或区域丢失导致无法三维成像的情况。
17.作为优选,单向排气阀的通气阈值不小于弹性回复机构的初始弹性力。
18.上述实现的过程中,气体由气室进入气动腔室过程中能够保证反射镜的转动先于反射镜的变角度运动,实现整个环形方向上沿壳体轴线方向的扫描,避免了断层或区域丢失导致无法三维成像的情况。
19.作为优选,弹性回复机构包括连接杆、滑动块以及回复弹簧;转动轴上开设有滑槽;滑动块设置于滑槽中;连接杆的一端抵持反射镜,另一端与滑动块铰接;回复弹簧的一端抵持滑动块,另一端抵持滑槽的槽壁上。
20.上述实现的过程中,弹性回复机构能够保证反射镜会回复到初始位置,也避免增压时反射镜突然达到角度变化的极值而降低了扫描的连续性。
21.作为优选,反射镜绕转动轴的端头转动与壳体的轴线所形成角度范围在45度到60度之间。
22.上述实现的过程中,考虑超声换能器的位置,小于45度角扫描区域距离超声换能器太远,不能很好的接收超声信号,大于60度角,会增加转动安装头与反射镜之间的距离,增大探头的尺寸。
23.作为优选,弧形导向头上靠近壳体的一端设置有环扣;壳体的内壁上绕轴线设置有环钩;环扣与环钩相互扣合。
24.上述实现的过程中,由于变角度反射装置靠一端的转动轴转动,长时间工作难免会发生翘曲,进而影响扫描区域,也降低了变角度反射装置的使用寿命,在远离转动轴的一端设置扣合结构,可以避免长时间的使用变角度反射装置产生翘曲的情况,也提高了变角度反射装置的使用寿命。
25.为实现本发明目的,提供了另一种技术方案:一种使用第一种技术方案中的气动三维扫描内窥探头的扫描方法,包括以下步骤:充气转动;通过气动孔向气动腔室中充入气体,气体由进气孔进入气室,并吹动气动转子带动转动轴转动进行扫描;增压变角度扫描;增大进气量,使气动腔室与变角度反射装置内部形成压差,反射镜绕铰接处转动,改变激光束的反射角度;排气转动;气室中的气体经排气孔排入气动腔室中,气体吹动气动转子带动转动轴转动进行扫描;降压变角度扫描;通过气动孔将气动腔室中的气体排出,使气动腔室与变角度反射装置内部的压差减小,反射镜绕铰接处转动,改变激光束的反射角度。
26.上述实现的过程中,通过向气动腔室中充入一定压力的气体即能实现环向方向和沿壳体轴线方向的扫描,形成三维成像,操作简单方便,并且一次扫描周期能够完成的扫描量是机械式驱动机构一次扫描周期扫描量的两倍。节约资源的同时也提高了三维成效的效率。
27.本发明的有益效果是 :反光镜的变角度和转动两种运动均不适用机械驱动机构,且通过直接向气动腔室中充入气体这一次性过程即能同时实现,整体上节约了能耗,也避免了适用机械驱动机构带来的不稳定性影响。
28.通过向气动腔室中充入一定压力的气体即能实现环向方向和沿壳体轴线方向的
扫描,形成三维成像,操作简单方便,并且一次扫描周期能够完成的扫描量是机械式驱动机构一次扫描周期扫描量的两倍。节约资源的同时也提高了三维成效的效率。
附图说明
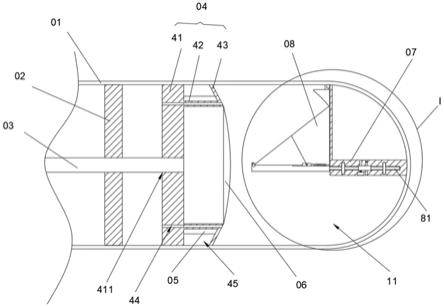
29.图1为本发明实施例中气动三维扫描内窥探头的结构示意图。
30.图2为图1中i的结构示意图。
31.图标:01、壳体;11、气动腔室;02、光纤轴承;03、光纤;04、气动安装头;41、固定底座;411、安装孔;42、环形凸壁;43、凸缘;44、气动孔;45、容置腔;05、超声换能器;06、准直透镜;07、气动机构;71、气室;72、进气孔;721、单向进气阀;73、排气孔;731、单向排气阀;74、固定轴承;75、座体;08、变角度反射装置;81、转动轴;811、气动转子;82、弹性回复机构;821、连接杆;822、滑动块;823、回复弹簧;83、反射镜;84、弧形导向头。
具体实施方式
32.下面将结合附图对本发明实施例中的技术方案进行清楚、完整地描述。
33.实施例1:请参见图1和图2,图1和图2均为气动三维扫描内窥探头的结构示意图。本实施例提供一种气动三维扫描内窥探头。
34.该气动三维扫描内窥探头包括壳体01、光纤03、光纤轴承02、气动安装头04、超声换能器05、准直透镜06、变角度反射装置08、气动机构07。光纤03轴承02、光纤03、气动安装头04、超声换能器05、准直透镜06、变角度反射装置08以及气动机构07均位于壳体01中。光纤轴承02和气动安装头04均与壳体01同轴设置。气动安装头04上开设有安装孔411。光纤03穿过光纤轴承02后设置于安装孔411中。超声换能器05套设于气动安装头04上。准直透镜06位于气动安装头04上远离光纤轴承02的一侧,且准直透镜06嵌设于气动安装头04上。气动机构07设置于壳体01的端头,且气动机构07中空形成气室71。气动机构07的侧壁上开设有进气孔72和排气孔73。变角度反射装置08通过转动轴81与气动机构07转动连接,且转动轴81同时穿过进气孔72和排气孔73。转动轴81上位于进气孔72和排气孔73处设置有气动转子811。气动安装头04、壳体01以及准直透镜06形成气动腔室11。气动安装头04和光纤轴承02均沿壳体01的轴线开设有气动孔44。气动孔44与气动腔室11联通。变角度反射装置08的反射镜83一端与转动轴81铰接。
35.变角度反射装置08绕壳体01轴线转动形成环向的扫描,是通过向气动腔室11中充入气体,使气体经气动机构07的进气孔72吹动转动轴81上的气动转子811进而带动转动轴81转动实现的。采用气压差的方式来产生转动力,可以减少使用机械驱动结构,降低能耗的同时,也避免了机械驱动机构运动所产生的不稳定性影响扫描结构的情况。利用气动腔室11与变角度反射装置08内部之间的压差来使反射镜83发生角度变化,进而实现沿壳体01轴线方向的扫描。环向扫描与沿壳体01轴线方向的扫描能够建立起三维立体成像机制,形成三维成像。反光镜的变角度和转动两种运动均不使用机械驱动机构,且通过直接向气动腔室11中充入气体这一次性过程即能同时实现,整体上节约了能耗,也避免了适用机械驱动机构带来的不稳定性影响。
36.下面介绍各子结构的具体结构:
气动安装头04主要用于安装光纤03头、超声换能器05以及准直透镜06。并将壳体01端头的腔室密封形成气动腔室11。气动安装头04的结构和形式多样,本实施例中,气动安装头04包括固定底座41、环形凸壁42以及凸缘43。环形凸壁42与固定底座41同轴设置,且环形凸壁42位于环形底座上远离光纤轴承02的一侧。环形凸壁42的一端与固定底座41连接,另一端与凸缘43连接。固定底座41、环形凸壁42、凸缘43以及壳体01形成容置腔45。超声换能器05套设在环形凸壁42上,且位于容置腔45中。固定底座41上开设有安装孔411。环形凸壁42的内部上绕轴线开设有固定环槽。准直透镜06嵌设于固定环槽中。气动孔44沿环形凸壁42的轴线穿过固定底座41和环形凸壁42。
37.可以理解的是,容置腔45用于设置超声换能器05,且容置腔45被密封,因此,在超声换能器05与壳体01之间可以充入耦合液提高光声耦合效果,该耦合液可以是水、油等。另外,超声换能器05也可以是绕容置腔45轴线环形阵列的排列结构,可以更好的对声信号进行接收和采集。
38.当然,气动孔44的数量和位置也可以根据需要设置,可以是绕壳体01轴线环形阵列,也可以是绕壳体01轴线直接开设的环形开口等。
39.固定底座41起到固定光纤03,稳定激光束射出角度的作用。环形凸壁42形一方面形成准直透镜06与光纤03之间的射光区域,另一方面结合凸缘43形成固定超声换能器05的容置腔45。环形凸壁42的尺寸也在一定程度上影响扫描的区域大小。
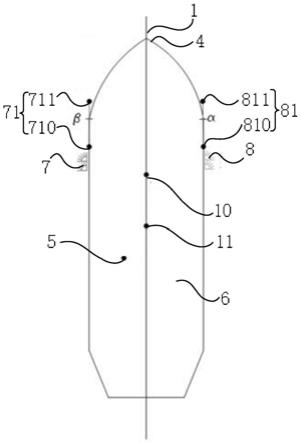
40.气动机构07作为探头上实现气压差转化为机械能的重要结构,其结构和形式也是多样的。本实施例中,气动机构07包括座体75、固定轴承74、单向进气阀721以及单向排气阀731。座体75的一端与壳体01的端头连接。座体75中空形成气室71。座体75的侧壁上沿壳体01的轴线开设有转动孔和轴承固定孔。转动轴81设置于转动孔中,且通过固定设置在轴承固定孔中的固定轴承74实现与座体75的转动连接。侧壁上开设有进气孔72和排气孔73。单向进气阀721设置于进气孔72中。单向排气阀731设置于排气孔73中。进气孔72与排气孔73均与转动孔联通。
41.固定轴承74能够稳定转动轴81的中轴线,保证转动轴81与壳体01轴线的同轴性,提高转动定位稳定性。在向气动腔室11中充入气体时,气体的压力在达到进气孔72中单向进气阀721的阈值后会打开进气孔72,气体经过进气孔72进入到气室71中,在流经进气孔72时,气体会吹动转动轴81上的气动转子811,进而带动转动轴81转动,实现环形方向上360度的全方位扫描。而当气动腔室11中的气体压力小于气室71中的气体压力时,排气孔73中的单向排气阀731会被打开,气室71中的气体会经过排气孔73排出到气动腔室11中,气体在经过排气孔73时会吹动气动转子811,进而带动转动轴81转动。这样,气动机构07内外的压差就转换成了转动轴81转动的机械能。
42.一次充气的过程能够完成两侧转动扫描,保证了扫描了频率,相比机械驱动机构的一个扫描周期,能够获取多一倍的数据,为成像提供更多的数据,大大提高三维成像的效果。气室71空间大小也可以根据扫描周期需要来确定,能够高效的保证扫描的数据结果的质与量。
43.本实施例中,变角度反射装置08包括反射镜83、弹性回复机构82、转动轴81以及弧形导向头84。反射镜83的一端与转动轴81的端头转动连接,另一端位于弧形导向头84上。反射镜83上靠近转动轴81的一侧设置有弹性回复机构82,且弹性回复机构82的一端抵持反射
镜83,另一端与转动轴81连接。
44.反射镜83的角度变化也是靠气动腔室11与变角度反射装置08内部的压差的实现,这样一次向气动腔室11中充入气体就可以完成环形方向的扫描和沿壳体01轴线方向的扫描,实现两个方向运动的紧密结合。
45.需要说明的是,由于一次充气就要完成两个方向的运动,因此,需要保证在气体通过进气孔72带动转动轴81转动后才进行对反射镜83的变角度运动,这样才能实现全方位的立体扫描,若先进行反射镜83的变角度运动再进行转动,会使扫描的区域发生部分丢失,影响三维成像。同样地,在气体经过排气孔73时,也需要先气动转动轴81转动,再进行反射镜83的变角度运动。
46.由此,单向进气阀721的通气阈值不大于弹性回复机构82的初始弹性力,这样,进气孔72会在反射镜83变角度之前通气使转动轴81转动,而单向排气阀731的通气阈值不小于弹性回复机构82的初始弹性力,排气孔73会在反射镜83变角度之前带动转动轴81转动。
47.另外,反射镜83通过绕铰接端转动来实现反射光束的角度变化,进而完成沿壳体01轴线方向的扫描,这种变角度的方式连续性强,且还能通过调整气体压力的变化速率来控制角度变化的速率。满足扫描速率和范围的需求。
48.弹性回复机构82的结构和形式多样,本实施例中,弹性回复机构82包括连接杆821、滑动块822以及回复弹簧823。转动轴81上开设有滑槽。滑动块822设置于滑槽中。连接杆821的一端抵持反射镜83,另一端与滑动块822铰接。回复弹簧823的一端抵持滑动块822,另一端抵持滑槽的槽壁上。弹性回复机构82能够保证反射镜83会回复到初始位置,也避免增压时反射镜83突然达到角度变化的极值而降低了扫描的连续性。
49.对于反射镜83的倾斜角度,由于反射镜83反射的是平行光束,因此,需要考虑反射后的区域以及对探头尺寸的影响。本实施例中,反射镜83绕转动轴81的端头转动与壳体01的轴线所形成角度范围在45度到60度之间。因为,当该角度小于45度角时,扫描区域距离超声换能器05太远,不能很好的接收超声信号。当该角度大于60度角时,会增加转动安装头与反射镜83之间的距离,增大探头的尺寸。
50.变角度反射装置08仅依靠转动轴81来实现转动,而变角度反射装置08的大部分质量又向弧形导向头84靠近,因此,长时间工作难免会发生翘曲,进而影响扫描区域,也降低了变角度反射装置08的使用寿命。本实施例中,弧形导向头84上靠近壳体01的一端设置有环扣。壳体01的内壁上绕轴线设置有环钩。环扣与环钩相互扣合。这样,在远离转动轴81的一端设置扣合结构,可以避免长时间的使用变角度反射装置08产生翘曲的情况,也提高了变角度反射装置08的使用寿命。
51.本发明实施例还提供了一种扫描方法,该扫描方法使用本实施例所提供的气动三维扫描内窥探头,主要包括以下步骤:第一步:充气转动;通过气动孔44向气动腔室11中充入气体,气体由进气孔72进入气室71,并吹动气动转子811带动转动轴81转动进行扫描。
52.经气动孔44向气动腔室11中充入气体,充入的气体压力刚开始时大于或等于单向进气阀721的阈值,使变角度反射装置08首先转动,实现环向方向上的扫描。
53.第二步:增压变角度扫描;增大进气量,使气动腔室11与变角度反射装置08内部形成压差,反射镜83绕铰接处转动,改变激光束的反射角度。
54.逐渐增加气体压力,使反射镜83实现变角度运动,进而完成对探头周围区域生物组织的三维扫描,超声换能器05接收超声波交由电脑进行三维成像处理。
55.第三步:排气转动;气室71中的气体经排气孔73排入气动腔室11中,气体吹动气动转子811带动转动轴81转动进行扫描。
56.降低气体压强,将气动腔室11中的气体抽出,单向排气阀731的阈值不小于弹性回复机构82的初始弹性力,这样排气孔73排气推动变角度反射装置08转动会先于发射镜角度变换运动,对周围生物组织进行环向扫描。
57.第四步:降压变角度扫描;使气动腔室11与变角度反射装置08内部的压差减小,反射镜83绕铰接处转动,改变激光束的反射角度。
58.继续降压,在弹簧回复力的作用下,反射镜83沿原来的运动轨迹反向运动,进而改变反射镜83的角度,实现沿壳体01轴线方向的运动,进而完成对探头周围区域生物组织的三维扫描,超声换能器05接收超声波交由电脑进行三维成像处理。
59.通过向气动腔室11中充入一定压力的气体即能实现环向方向和沿壳体01轴线方向的扫描,形成三维成像,操作简单方便,并且一次扫描周期能够完成的扫描量是机械式驱动机构一次扫描周期扫描量的两倍。节约资源的同时也提高了三维成效的效率。
60.所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。