:
1.本发明涉及水动力学研究技术领域,具体涉及一种水下航行体表面层流区壁面脉动压力频谱预测方法。
背景技术:
2.声波是一种能在水介质中远距离传播的能量形式,而壁面脉动压力是水下航行体重要的水动力噪声源。很强的噪声会干扰水下航行体的探测和通讯。为了提高水下航行器的探测和通讯能力,从噪声源上采取改进措施是可行的措施之一。而提出改进措施,就要先知道噪声源的表现如何。因此,水下航行器的壁面脉动压力一直以来是科学和工程关注的重要问题。
3.对于水下航行体表面层流区壁面脉动压力频谱预测,现有的、可能的研究手段主要有三种:实验测量、数值模拟和经验公式。实验方法可以测量层流区、转捩区和湍流区的的脉动压力频谱,但实验对测量设备要求高,模型加工成本高,实验周期较长。而且,对于大型水下航行体,目前很难做到一比一的实验,缩比实验的雷诺数又远小于实际,不能代表真实流动的结果。因此实验方法很难在实际工程问题中进行预测。数值模拟的方法能全面的体现流动中的细节。此方法可以用于研究流动机理,但要计算实际问题中的表面脉动压力频谱,需要计算出实际背景扰动下的流动演化过程,包括感受性过程,以及层流区、转捩区和湍流区流动,需要的计算资源太大,现有的计算机资源无法满足。对于大型水下航行体,则需要的计算资源更多,更加无法实现。因此,目前看来数值模拟方法难以在实际工程问题中进行预测。经验公式的方法是根据已有实验测量或数值模拟的结果,通过经验拟合,预测出层流区壁面脉动压力频谱。该方法缺乏理论依据,预测时需要经验设置参数值,对未知工况预测准确性较低。而且,对于大型水下航行体的高雷诺数流动,本就缺少相应的实验数据和数值模拟结果,只能根据缩比模型的、低雷诺数的结果依靠经验进行推广,准确性更加难以保证。因此,目前看来该方法难以在实际工程问题中给出准确的预测结果。
技术实现要素:
4.本发明的目的在于提供一种准确度高、能应用于工程的基于稳定性理论的水下航行体表面层流区壁面脉动压力频谱预测方法。本发明的技术方案如下:
5.一种水下航行体表面层流区壁面脉动压力频谱预测方法,包括以下步骤:
6.步骤一,确定拟分析的水下航行体表面的层流基本流;
7.步骤二,基于线性稳定性理论,分析步骤一中的基本流的流动稳定性,获得水下航行体表面层流基本流边界层内的各频率扰动波幅值沿流向的增长率,包括如下:
8.1)基于流动稳定性理论,将流动的瞬时量φ分为定常基本流和小扰动之和,即其中,矢量φ=(v1,v2,v3,p)
t
表示瞬时量,矢量表示基本流的量,φ
′
=(v'1,v'2,v'3,p')
t
表示扰动量矢量,v1,v2,v3分别为流向、法向和周向上的速度分量,p为压力,上标“—”表示基本流,上角标
“’”
表示扰动量;瞬时量φ和基本流都满足无量纲
的navier
‑
stokes方程,即对于瞬时量φ,有
[0009][0010]
其中,t为时间,q1、q2和q3分别为流向、法向和周向空间坐标,γ、a、b、c、d、v
11
、v
22
、v
33
、v
12
、v
13
、v
23
为线性部分的系数矩阵,f
n
为非线性部分;
[0011]
2)用瞬时量的方程减去基本流的方程,得到关于扰动量φ
′
的方程;考虑扰动是小量,略去二阶以上的非线性小量,得到关于φ
′
的线性化扰动方程,即
[0012][0013]
其中γ'、a'、b'、c'、d'、v'
11
、v'
22
、v'
33
、v'
12
、v'
13
、v'
23
为系数矩阵;
[0014]
3)考虑边界层在流向上变化缓慢,在流向上使用近似平行流假设,将扰动描述为行进波的形式,即
[0015][0016]
其中为扰动的特征函数矢量,ω为圆频率,α为流向波数,β为周向波数,c.c.表示复共轭,在空间模式下,为复数,α
r
和α
i
分别为α的实部和虚部,σ=
‑
α
i
表示空间增长率,将扰动展开式(3)代入到线性化的扰动方程(2),即得到线性稳定性方程
[0017][0018]
其中,为系数矩阵,其中包含基本流、壁面的流向和周向曲率、扰动圆频率ω、波数α和β,以及雷诺数re等信息。
[0019]
4)线性稳定性方程(4)是齐次线性常微分方程,在已知基本流和壁面曲率的情况下,需要求解一个关于ω、α、β和re的特征值问题,对于步骤一中的基本流,采用数值方法,即muller方法,求解关于ω、α、β和re的特征值问题,得到边界层内各频率扰动波的幅值沿流向的增长率σ;
[0020]
步骤三,对步骤二中获得的不同频率的扰动波幅值增长率沿流向进行积分,获得各频率扰动波幅值的放大因子。
[0021]
步骤四,对步骤三中获得的幅值放大因子,通过转捩判据判断层流区位置,即从边界层前缘开始向下游,各个流向位置的最大幅值放大因子首先达到转捩判据给定的值处为转捩起始位置,转捩起始位置之前为层流区。
[0022]
步骤五,层流区壁面脉动压力频谱为不同频率压力扰动幅值的相对倍数频谱,对水下航行体表面层流区的各位置上,扰动波的壁面脉动压力幅值的放大倍数进行计算,从而获得层流区壁面脉动压力频谱。
[0023]
进一步地,步骤一中,层流基本流通过求解定常不可压navier
‑
stokes方程、边界层方程或blasius方程获得。
[0024]
进一步地,步骤三中,积分表达式为:
[0025][0026]
其中,n为幅值放大因子,q
10
为积分起始位置,a为扰动幅值,a0为起始位置扰动幅值。
[0027]
进一步地,积分的起始位置q
10
或者选用各频率扰动开始增长的位置,或者选用从同一流向位置开始。
[0028]
进一步地,步骤五中,设自然常数e的n次方表示某一频率的扰动波从初始位置开始到当前流向位置的幅值放大倍数,对同一位置处不同频率的扰动波幅值放大倍数按照下列公式计算:
[0029][0030]
本发明与现有技术相比的有益效果:
[0031]
(1)本发明建立了适用于水下航行体表面层流区壁面脉动压力频谱预测方法,相对现有的方法更适用于工程实际问题;
[0032]
(2)本发明采用基于流动稳定性理论的分析方法,具有理论依据,计算结果可靠,计算量小;
[0033]
(3)本发明能满足从小型水下航行器到大型潜艇等不同水下航行体的首部、指挥台围壳、舵翼等不同位置处,层流区壁面脉动压力频谱预测的需求。
附图说明
[0034]
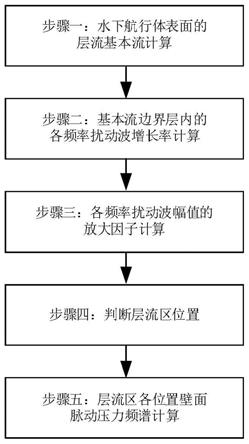
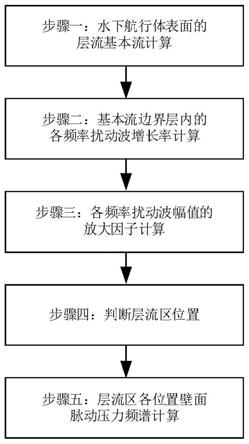
图1为本发明步骤框图
[0035]
图2为平板边界层扰动增长率云图
[0036]
图3为平板边界层扰动幅值放大因子n值分布云图
[0037]
图4为平板壁面层流区八个位置壁面脉动压力频谱预测结果
[0038]
图5为回转体suboff首部层流基本流速度分布云图
[0039]
图6为回转体suboff首部扰动增长率云图
[0040]
图7为回转体suboff首部扰动幅值放大因子n值分布图
[0041]
图8为回转体suboff首部层流区八个位置壁面脉动压力频谱预测结果
具体实施方式
[0042]
下面结合具体实施方式及附图对本发明进行详细说明。在下面的描述中,出于解释而非限制性的目的,阐述了具体细节,以帮助全面地理解本发明。然而,对本领域技术人员来说显而易见的是,也可以在脱离了这些具体细节的其它实施例中实践本发明。
[0043]
在此需要说明的是,为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与根据本发明的方案密切相关的设备结构和/或处理步骤,而省略了与本发明关系不
大的其他细节。
[0044]
本发明实施例提供了一种水下航行体表面层流区壁面脉动压力频谱预测方法,如图1所示,包括下述步骤:
[0045]
步骤一,确定拟分析的水下航行体表面的层流基本流;
[0046]
该步骤中,层流基本流通过求解定常不可压navier
‑
stokes方程或其简化方程如边界层方程和blasius方程等获得,获得流场中三个空间方向上的速度分量及压力值。因为只需要层流的结果,所以该步骤的计算方法对实际的小型、中型和大型水下航行体尺寸的模型均适用。
[0047]
该步骤中,水下航行体包括水下载人潜器、水下无人潜器及水下兵器。水下航行体表面包括平面及曲面。
[0048]
步骤二,基于线性稳定性理论,分析步骤一中的基本流的流动稳定性,获得水下航行体表面层流基本流边界层内的各频率扰动波幅值沿流向的增长率;
[0049]
该步骤中,基于流动稳定性理论,将流动的瞬时量φ分为定常基本流和小扰动之和,即其中,矢量φ=(v1,v2,v3,p)
t
表示瞬时量,矢量表示基本流的量,φ
′
=(v'1,v'2,v'3,p')
t
表示扰动量矢量,v1,v2,v3分别为流向、法向和周向上的速度分量,p为压力,上标“—”表示基本流,上角标
“’”
表示扰动量。瞬时量φ和基本流φ都满足无量纲的navier
‑
stokes方程,即
[0050][0051]
其中,t为时间,q1、q2和q3分别为流向、法向和周向,γ、a、b、c、d、v
11
、v
22
、v
33
、v
12
、v
13
、v
23
为线性部分的系数矩阵,f
n
为非线性部分。本专利中,上角标“*”表示有量纲的量,没有该上角标的量为无量纲量。
[0052]
用瞬时量的方程减去基本流的方程,则得到关于扰动量φ
′
的方程。考虑扰动是小量,略去二阶以上的非线性小量,则得到关于φ
′
的线性化扰动方程,即
[0053][0054]
其中γ'、a'、b'、c'、d'、v'
11
、v'
22
、v'
33
、v'
12
、v'
13
、v'
23
为系数矩阵。
[0055]
考虑边界层在流向上变化较缓慢,在流向上使用近似平行流假设,将扰动描述为行进波的形式,即
[0056][0057]
其中为扰动的特征函数矢量,ω为圆频率,α为流向波数,β为周向波数,c.c.表示复共轭。在空间模式下,α=α
r
iα
i
为复数,α
r
和α
i
分别为α
r
的实部和虚部,σ=
‑
α
i
表示空间增长率。将扰动展开式(3)代入到线性化的扰动方程(2),即得到线性稳定性方程
[0058][0059]
其中,为系数矩阵,其中包含基本流、壁面的流向和周向曲率、扰动圆频率ω、波数α和β,以及雷诺数re等信息。
[0060]
线性稳定性方程(4)是齐次线性常微分方程,若要有非零解,其系数必须满足一定的关系。在已知基本流和壁面曲率的情况下,需要求解一个关于ω、α、β和re的特征值问题。
[0061]
该步骤中,对于步骤一中的基本流,采用数值方法,即muller方法,求解关于ω、α、β和re的特征值问题,得到边界层内各频率扰动波的幅值沿流向的增长率σ。该步骤中,稳定性分析方法对实际的小型、中型和大型水下航行体流动的雷诺数均适用。
[0062]
该步骤中,稳定性分析中考虑了壁面的曲率。
[0063]
步骤三,对步骤二中获得的不同频率的扰动波幅值增长率沿流向进行积分,获得各频率扰动波幅值的放大因子。
[0064]
该步骤中,积分表达式为:
[0065][0066]
其中,n为幅值放大因子,q1为流向空间坐标,q
10
为积分起始位置,a为扰动幅值,a0为起始位置扰动幅值。
[0067]
该步骤中,积分的起始位置q
10
可以选用各频率扰动开始增长的位置,也可以选用从同一流向位置开始。
[0068]
步骤四,对步骤三中获得的幅值放大因子,通过转捩判据判断层流区位置,即从边界层前缘开始向下游,各个流向位置的最大幅值放大因子首先达到转捩判据给定的值处为转捩起始位置,转捩起始位置之前为层流区。
[0069]
步骤五,对水下航行体表面层流区的各位置上,扰动波的壁面脉动压力幅值的放大倍数进行计算。自然常数e的n次方表示某一频率的扰动波从初始位置开始到当前流向位置的幅值放大倍数,计算公式如方程(6)。对同一位置处不同频率的扰动波幅值放大倍数进行计算,就可获得各位置壁面脉动压力频谱分布。
[0070][0071]
该步骤中,层流区壁面脉动压力频谱为不同频率压力扰动幅值的无量纲相对倍数频谱。
[0072]
下面给出采用本发明的方法预测层流区壁面脉动压力频谱的两个实施例:
[0073]
在第一个实施例中,计算对象为平板边界层流动。
[0074]
具体的,本实施例工况为零攻角,来流速度5m/s;本实施例使用的基本流为blasius解,blasius解的求解方法见(周光炯,严宗毅等,流体力学.下册[m].高等教育出版社,1993.)
[0075]
具体的,本实施例使用的流动稳定性分析方法见文献(周恒,赵耕夫.流动稳定性.国防工业出版社,2004)。通过计算,可获得平板边界层增长率云图,如图2所示,图中f
*
表示有量纲频率,x
*
为距平板前缘水平距离。
[0076]
具体的,本实施例采用从各频率增长率为零的点,即扰动开始增长处,开始积分,积分后所获得的平板边界层幅值放大因子n值分布图如图3所示。
[0077]
具体的,本实施例的转捩判据为扰动幅值放大因子最先达到7处,对应的流向位置为距平板前缘0.4528m处,根据转捩判据此处为转捩位置。本实施例的扰动失稳临界位置为距平板前缘0.0183m处,因此,本实施例的层流区距离为0m
‑
0.4528m处,如图3中所示。
[0078]
具体的,本实施例中8个不同流向位置x
*
分别为0.05m、0.10m、0.15m、0.20m、0.25m、0.30m、0.35m和0.40m的壁面脉动压力频谱预测结果如图4所示。
[0079]
在第二个具体实施例中,计算对象为回转体suboff模型绕流边界层流动(型值公开groves,n c,huang,t t,chang,m s.geometric characteristics of darpa suboff models(dtrc model numbers 5470and 5471).dtrc/shd
‑
1298
‑
01,david taylor research center,maryland,(1989).)。
[0080]
具体的,本实施例工况为零攻角,航行速度5m/s;计算所得的有量纲层流基本流结果如图5所示,图中x
*
表示回转体轴线方向,y
*
表示径向,坐标原点为回转体顶点,u
*
表示轴线方向的速度分量,v
*
表示径向速度分量;本实施例使用fluent软件计算航行体首部层流基本流的流场分布。
[0081]
具体的,本实施例使用的流动稳定性分析方法见文献(jingcheng liu,xuesen chu and yongming zhang.numerical investigation of natural transitions of bow boundary layers over underwater axisymmetric bodies.phys.fluids 33,074101(2021))。通过计算,可获得suboff回转体首部增长率云图,如图6所示。
[0082]
具体的,本实施例采用从各频率增长率为零的点开始积分,积分后所获得的幅值放大因子分布图如图7所示。
[0083]
具体的,本实施例的转捩判据为扰动幅值放大因子最先达到7处,对应的流向位置为回转体轴向距头部顶点0.3018m处,根据转捩判据此处为转捩位置。本实施例的扰动失稳临界位置为回转体轴向距头部顶点0.1316m处,因此,本实施例的层流区距离为0m
‑
0.3018m处,如图7中所示。
[0084]
具体的,本实施例中8个不同流向位置x
*
分别为0.16m、0.18m、0.20m、0.22m、0.24m、0.26m、0.28m和0.30m的壁面脉动压力频谱预测结果如图8所示。
[0085]
如上针对一种实施例描述和/或示出的特征可以以相同或类似的方式在一个或更多个其它实施例中使用,和/或与其它实施例中的特征相结合或替代其它实施例中的特征使用。
[0086]
应该强调,术语“包括/包含”在本文使用时指特征、整件、步骤或组件的存在,但并不排除一个或更多个其它特征、整件、步骤、组件或其组合的存在或附加。
[0087]
本发明以上的装置和方法可以由硬件实现,也可以由硬件结合软件实现。本发明涉及这样的计算机可读程序,当该程序被逻辑部件所执行时,能够使该逻辑部件实现上文所述的装置或构成部件,或使该逻辑部件实现上文所述的各种方法或步骤。本发明还涉及用于存储以上程序的存储介质,如硬盘、磁盘、光盘、dvd、flash存储器等。
[0088]
这些实施例的许多特征和优点根据该详细描述是清楚的,因此所附权利要求旨在覆盖这些实施例的落入其真实精神和范围内的所有这些特征和优点。此外,由于本领域的技术人员容易想到很多修改和改变,因此不是要将本发明的实施例限于所例示和描述的精
确结构和操作,而是可以涵盖落入其范围内的所有合适修改和等同物。
[0089]
本发明未详细说明部分为本领域技术人员公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。