1.本发明属于超精密运动控制技术领域,具体涉及一种基于前向递归的小行程纳米运动台滞回特性建模方法。
背景技术:
2.公开号为cn113029235a、公开日为2021年02月25日、名称为“小行程纳米级运动台及热相关滞回数据测量方法”的发明专利申请,采用尺蠖电机和双极电磁铁复合方式驱动台,既可以发挥电磁铁的大出力优势,又能利用尺蠖电机的高分辨率、高频响出力特性,使运动台兼顾高加速度和高定位精度。此外,该运动台可实现绕z自由度转动,并可以掉电自锁,提高高端制造过程中工件的安全性。
3.该运动台通过尺蠖电机和双极电磁铁复合方式驱动,其执行器出力存在严重的滞回非线性特性,在热
‑
电
‑
磁等多场耦合作用下,形成更为复杂的热相关动态滞回非线性。该动态滞回特性造成运动台执行器的控制电流和出力呈强非线性关系,是影响运动台定位精度的关键因素,严重制约了运动台的定位精度,因此,运动台滞回特性模型的建立具有重要意义。
4.传统的滞回特性模型如presiach模型、prandtl
‑
ishlinskii(pi)模型、bouc
‑
wen模型、duhem模型以及jile
‑
atherton(ja)模型等都是静态滞回非线性模型,描述动态滞回非线性的精度较差。已有的动态滞回特性的建模方法是在静态磁滞模型的基础上进行改动的。授权公告号为cn106707760b、授权公告日为2020年02月14日、名称为“一种用于压电驱动器动态迟滞补偿的非线性逆控制方法”的发明专利,通过建立与输入频率有关的动态临界值得到速率相关的play算子,将速率相关的play算子与密度函数相结合得到速率相关的prandtl
‑
ishlinskii模型,该建模方法计算量大,实现复杂,仅适合具有率相关特性的滞回模型建立,无法描述本发明所述运动台的热相关动态滞回特性。
5.基于数据驱动的非线性控制采用回归拟合的方式对系统进行建模,具有不需要深入了解系统机理,建模精度高的特点,近年来受到广泛关注。授权公告号为cn104796111b、授权公告日为2017年07月28日、名称为“一种用于动态迟滞系统建模与补偿的非线性自适应滤波器”的发明专利,提供了一种精度高、实时性好、易于实现的非线性自适应滤波及其对动态迟滞非线性的建模与补偿的方法。但该方法的核心步骤涉及梯度计算,存在梯度消失问题,同时也未考虑其他物理量对滞回特性的影响,如热相关滞回特性,因此不适合在本发明所述的运动台中应用。
技术实现要素:
6.本发明的目的在于提供一种基于前向递归的小行程纳米运动台滞回特性建模方法,本发明基于一个多输入单输出非线性系统的输入输出数据快速识别模型参数,减小计算量并解决传统算法在模型识别过程中矩阵求逆困难,并因特征值过小导致的矩阵病态问题,实现运动台的精确控制。
7.本发明以公开号为cn113029235a、公开日为2021年02月25日、名称为“小行程纳米级运动台及热相关滞回数据测量方法”的发明专利申请所测数据为基础,提出一种基于前向递归的小行程纳米运动台滞回特性建模方法。该方法从非线性辨识角度出发,采用参数线性化模型结构,在满足精度的前提下获得复杂度最小的模型。在模型构建过程中,采用前向递推的方式对信息矩阵进行处理,逐步扩张模型规模并完成模型参数。解决了传统最小二乘类方法在拟合过程中因特征值过小导致的矩阵病态问题,在解决计算稳定性的同时极大降低了计算复杂度,对运动台的控制性能提升具有重要意义。
8.本发明为实现上述目的,采取的技术方案如下:
9.基于前向递归的小行程纳米运动台滞回特性建模方法,所述方法步骤如下:
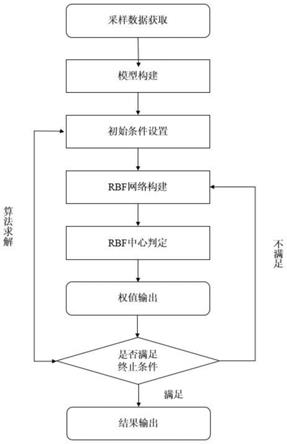
10.建模过程包括采样数据获取、模型构建,算法求解以及结果输出四部分,所述采样数据获取,方法如基于小行程纳米级运动台及热相关滞回数据测量方法(见公开号为cn113029235a、公开日为2021年06月25日的发明专利申请)中所述,获取在不同温度、不同位移条件下的电流—力的相关数据采集;所述模型构建部分包括基函数确定与模型的结构和参数确定;所述算法求解部分包括初始条件设置、rbf网络构建、rbf中心个数判定以及权值输出。
11.进一步的是,所述采样数据获取部分获取在不同温度、不同位移条件下的电流—力的相关数据采集,选取样本为n组,其中选取的输入样本表示为x=[x1,x2,
···
,x
n
],x
n
表示为[t
n
,l
n
,i
n
],输出样本表示为y=[y1,y2,
···
,y
n
],y
n
表示为[f
n
];
[0012]
其中:t
n
表示温度,l
n
表示位移,i
n
表示电流,为输入信号;f
n
表示吸合力,为输出信号;
[0013]
设定期望的模型精度指标j
e
和最小指标变化量p。
[0014]
进一步的是,所述模型构建部分包括基函数确定与模型的结构确定和参数确定,表示为:在建模过程中,考虑一个多输入单输出非线性系统,通过一个含有n个隐藏节点的单输出径向基函数(rbf)进行建模,基函数模型表达式为:
[0015][0016]
公式(1)中:x为多输入单输出非线性系统的输入变量,具体包括运动台的输入电流,设定温度以及位移,表示为x=[t,l,i];其中,t表示设定温度,l表示设定位移,i表示输入电流;c
i
表示单输出径向基函数的中心,c
i
=x
i
=[t
i
,i
i
,l
i
],σ表示单输出径向基函数的宽度,取值为σ=[0.5,0.5,0.5],表示第i个径向基函数的输出向量;
[0017]
考虑建模误差e,线性参数化模型表示为:
[0018][0019]
公式(2)中:y表示神经网络的输出,即吸合力f,i表示样本标号,取值为1到n,n表示隐藏的节点个数,w
i
表示第i个神经网络节点的线性输出权重,表示第i个径向基函数的输出向量;
[0020]
将(2)式写成矩阵形式,表达为:
[0021]
y=φw e
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0022]
式中
[0023][0024][0025]
公式(3)中:y表示输出矩阵,φ表示回归矩阵,w表示神经网络的输出权重矩阵,e表示误差矩阵,y
n
表示通过第n组数据,得到的神经网络输出;t表示对矩阵进行转置,表示n维空间,w
n
表示第n个神经网络节点的线性输出权重,表示第n个径向基函数的输出向量,表示第i个径向基函数的输出向量,x(n)表示引入的中间变量,t
n
,i
n
,l
n
表示第n个节点的温度,电流,位移;表示
n
×
n
维空间。
[0026]
进一步的是,所述算法求解步骤如下:
[0027]
步骤一:初始条件设置:选择n组样本作为候选中心矩阵定义选中的中心矩阵1≤k≤n,其初始值为空,设置初始网格的大小,k=0,r0=i,y
(0)
=r0y=y;
[0028]
其中:t
candidate
为候选中心矩阵,t
chosen
表示选中的中心矩阵,表示第i个径向基函数的输出向量,k表示引入的变量,r0表示初始残差矩阵,i表示单位矩阵,表示用于后续回归矩阵的递推计算,y
(0)
表示初始输出矩阵;
[0029]
步骤二:rbf网络构建;
[0030]
利用公式(5)计算所有候选组中的贡献值,从δj
k 1
(φ
i
)(k 1≤i≤n)中选出贡献最大的一个,并将这个中心从t
candidate
组移到t
chosen
组;
[0031][0032][0033]
其中,j
k
表示指标函数,y表示输出矩阵,表示神经网络输出权重矩阵的转置,表示第k步选取的回归矩阵,δj
k 1
表示指标函数的变化量,y
t
表示输出矩阵的转置,表示第k 1个径向基函数的输出,表示第k 1个径向基函数输出的转置,a
j,y
,a
j,k 1
,a
j,j
均为算子,以算子a
j,y
和a
j,k 1
为例,对其进行定义说明如方程(6)所示,算子a
j,j
,a
j,k 1
均能写成方程式(6)的形式;
[0034][0035][0036]
式中:
[0037][0038]
[0039]
的推导,与方程(7)雷同;
[0040]
其中,φ
j
‑1表示第j
‑
1步的回归矩阵,φ
j
‑
1t
表示第j
‑
1步回归矩阵的转置,y表示输出矩阵;其余符号为求解方程(5)时,引入的辅助变量;
[0041]
步骤三:权值输出;
[0042]
在确定k个隐藏节点的rbf网络后,采用公式(8)计算其对应的输出权值;
[0043]
所述公式(8)表达式为:
[0044][0045]
上述式中,w
j
表示第i个神经网络节点的输出权重,w
i
表示第j个神经网络节点的输出权重,i,j,k表示在递推关系时,为说明数据顺序引入的变量;
[0046]
步骤四:终止条件;
[0047]
计算由步骤三生成的神经网络的指标函数j
k
和指标函数的变化量δj
k 1
,判断是否满足设置的模型精度指标j
e
,或者达到变化量的设定值p;如果满足,则停止算法,确定选中的rbf网络中心个数n=k、相对应的回归矩阵以及相对应的权重输出矩阵w=[w1,w2,
···
,w
n
],否则,k=k 1,返回步骤二;
[0048]
结果输出:获得最终模型表达式为:
[0049][0050]
本发明相对于现有技术的有益效果是:本发明基于一个多输入单输出非线性系统的输入输出数据快速识别模型参数,在减小计算量的同时保证了模型精度,并解决传统最小二乘类算法因矩阵病态导致的算法不稳定问题,进而通过逆模型补偿提高运动台的性能。
附图说明
[0051]
图1是本发明的基于前向递归的小行程纳米运动台滞回特性建模方法的流程图;
[0052]
图2是本发明的基于前向递归的小行程纳米运动台滞回特性建模方法中的rbf网络图。图中i、t、l是输入变量,分别表示电流、温度和位移,n表示在n组数据选中的节点个数,w
n
表示第n个节点相对应的权重,f是输出变量,表示力。
具体实施方式
[0053]
下面结合附图对本发明涉及的建模方法和算法步骤作出进一步详细的说明:
[0054]
具体实施方式一:如图1及图2所示,本实施方式披露了一种基于前向递归的小行程纳米运动台滞回特性建模方法,所述方法步骤如下:
[0055]
建模过程包括采样数据获取、模型构建,算法求解以及结果输出四部分,所述采样数据获取,方法如基于小行程纳米级运动台及热相关滞回数据测量方法(见公开号为cn113029235a、公开日为2021年06月25日的发明专利申请)中所述,获取在不同温度、不同位移条件下的电流—力的相关数据采集;所述模型构建部分包括基函数确定与模型的结构和参数确定;所述算法求解部分包括初始条件设置、rbf网络构建、rbf中心个数判定以及权
值输出。
[0056]
进一步的是,所述采样数据获取部分获取在不同温度、不同位移条件下的电流—力的相关数据采集,选取样本为n组,其中选取的输入样本表示为x=[x1,x2,
···
,x
n
],x
n
表示为[t
n
,l
n
,i
n
],输出样本表示为y=[y1,y2,
···
,y
n
],y
n
表示为[f
n
];
[0057]
其中:t
n
表示温度,l
n
表示位移,i
n
表示电流,为输入信号;f
n
表示吸合力,为输出信号;
[0058]
设定期望的模型精度指标j
e
和最小指标变化量p。
[0059]
进一步的是,所述模型构建部分包括基函数确定与模型的结构确定和参数确定,表示为:在建模过程中,考虑一个多输入单输出非线性系统,通过一个含有n个隐藏节点的单输出径向基函数(rbf)进行建模,基函数模型表达式为:
[0060][0061]
公式(1)中:x为多输入单输出非线性系统的输入变量,具体包括运动台的输入电流,设定温度以及位移,表示为x=[t,l,i];其中,t表示设定温度,l表示设定位移,i表示输入电流;c
i
表示单输出径向基函数的中心,c
i
=x
i
=[t
i
,i
i
,l
i
],σ表示单输出径向基函数的宽度,取值为σ=[0.5,0.5,0.5],表示第i个径向基函数的输出向量;
[0062]
考虑建模误差e,线性参数化模型表示为:
[0063][0064]
公式(2)中:y表示神经网络的输出,即吸合力f,i表示样本标号,取值为1到n,n表示隐藏的节点个数,w
i
表示第i个神经网络节点的线性输出权重,表示第i个径向基函数的输出向量;
[0065]
将(2)式写成矩阵形式,表达为:
[0066]
y=φw e
ꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0067]
式中
[0068][0069][0070]
公式(3)中:y表示输出矩阵,φ表示回归矩阵,w表示神经网络的输出权重矩阵,e表示误差矩阵,y
n
表示通过第n组数据,得到的神经网络输出;t表示对矩阵进行转置,表示n维空间,w
n
表示第n个神经网络节点的线性输出权重,表示第n个径向基函数的输出向量,表示第i个径向基函数的输出向量,x(n)表示引入的中间变量,t
n
,i
n
,l
n
表示第n个节点的温度,电流,位移;表示
n
×
n
维空间。
[0071]
进一步的是,所述算法求解步骤如下:
[0072]
步骤一:初始条件设置:选择n组样本作为候选中心矩阵定义选中的中心矩阵1≤k≤n,其初始值为空,设置初始网格的大小,k=0,r0=i,y
(0)
=r0y=y;
[0073]
其中:t
candidate
为候选中心矩阵,t
chosen
表示选中的中心矩阵,表示第i个径向基函数的输出向量,k表示引入的变量,r0表示初始残差矩阵,i表示单位矩阵,表示用于后续回归矩阵的递推计算,y
(0)
表示初始输出矩阵;
[0074]
步骤二:rbf网络构建;
[0075]
利用公式(5)计算所有候选组中的贡献值,从δj
k 1
(φ
i
)(k 1≤i≤n)中选出贡献最大的一个,并将这个中心从t
candidate
组移到t
chosen
组;
[0076][0077][0078]
其中,j
k
表示指标函数,y表示输出矩阵,表示神经网络输出权重矩阵的转置,表示第k步选取的回归矩阵,δj
k 1
表示指标函数的变化量,y
t
表示输出矩阵的转置,表示第k 1个径向基函数的输出,表示第k 1个径向基函数输出的转置,a
j,y
,a
j,k 1
,a
j,j
均为算子,以算子a
j,y
和a
j,k 1
为例,对其进行定义说明如方程(6)所示,算子a
j,j
,a
j,k 1
均能写成方程式(6)的形式;
[0079][0080][0081]
式中:
[0082][0083][0084]
的推导,与方程(7)雷同;
[0085]
其中,φ
j
‑1表示第j
‑
1步的回归矩阵,φ
j
‑
1t
表示第j
‑
1步回归矩阵的转置,y表示输出矩阵;其余符号为求解方程(5)时,引入的辅助变量;
[0086]
步骤三:权值输出;
[0087]
在确定k个隐藏节点的rbf网络后,采用公式(8)计算其对应的输出权值;
[0088]
所述公式(8)表达式为:
[0089][0090]
上述式中,w
j
表示第i个神经网络节点的输出权重,w
i
表示第j个神经网络节点的输出权重,i,j,k表示在递推关系时,为说明数据顺序引入的变量;
[0091]
步骤四:终止条件;
[0092]
计算由步骤三生成的神经网络的指标函数j
k
和指标函数的变化量δj
k 1
,判断是否满足设置的模型精度指标j
e
,或者达到变化量的设定值p;如果满足,则停止算法,确定选中
的rbf网络中心个数n=k、相对应的回归矩阵以及相对应的权重输出矩阵w=[w1,w2,
···
,w
n
],否则,k=k 1,返回步骤二;
[0093]
结果输出:获得最终模型表达式为:
[0094][0095]
以上仅为本发明较佳的具体实施方式,但本发明的保护范围,并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。