1.本发明涉及一种信息处理装置、信息处理方法以及服务器。
背景技术:
2.以往,已知一种在多个车辆间发送接收表示车辆的位置、速度等车辆数据的通信数据包的方法(专利文献1)。这样的在多个车辆间的发送接收被称为车车间通信。在专利文献1所记载的发明中,在车车间通信的通信品质为容许级别以上的情况下,采用比狭域发送周期长的广域发送周期,在通信品质小于容许级别的情况下,采用与狭域发送周期相等的值或比其小的值的第二广域发送周期。
3.现有技术文献
4.专利文献
5.专利文献1:国际公开第2017/159240号
技术实现要素:
6.发明要解决的问题
7.然而,即使设为能够通过车车间通信(直接通信)进行通信,也有可能由于之后的路径而导致电波的强度变弱、或者由于拥堵状况而导致通信品质降低。在这种情况下,难以通过直接通信发送接收数据。专利文献1所记载的发明在难以通过直接通信发送接收数据的情况下切换为间接通信。然而,例如在从直接通信切换为间接通信时的初始连接需要时间的情况下,有可能妨碍顺畅的数据共享。
8.本发明是鉴于上述问题而完成的,其目的在于提供一种实现顺畅的数据共享的信息处理装置、信息处理方法以及服务器。
9.用于解决问题的方案
10.本发明的一个方式所涉及的信息处理装置基于移动体和其它移动体将来会行驶的位置信息、与将来会行驶的位置信息相应的将来的直接通信的通信环境信息、以及移动体将来会向其它移动体发送的数据量信息或会从其它移动体接收的数据量信息,来判定是否能够通过直接通信发送或接收与数据量信息有关的数据量,在判定为无法通过直接通信发送或接收数据量的情况下,针对直接通信和间接通信中的至少任一方制作移动体与其它移动体之间的通信计划信息,向其它移动体发送通信计划信息。
11.发明的效果
12.根据本发明,实现顺畅的数据共享。
附图说明
13.图1是本发明的第一实施方式所涉及的通信网络的整体概要图。
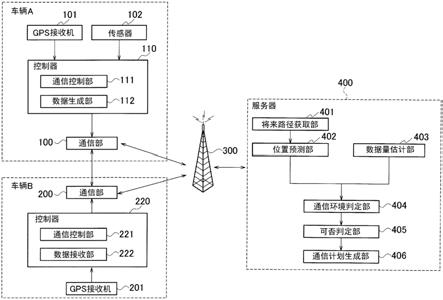
14.图2是本发明的第一实施方式所涉及的车辆以及服务器的概要结构图。
15.图3是说明本发明的第一实施方式所涉及的数据量的估计方法的一例的图。
16.图4是说明本发明的第一实施方式所涉及的行驶场景的一例的图。
17.图5是说明本发明的第一实施方式所涉及的通信环境的一例的图。
18.图6是说明本发明的第一实施方式所涉及的通信环境的一例的图。
19.图7是说明本发明的第一实施方式所涉及的能够通过直接通信发送的数据量的一例的图。
20.图8是说明本发明的第一实施方式所涉及的车辆以及服务器的动作例的流程图。
21.图9是说明本发明的第一实施方式所涉及的车辆以及服务器的动作例的流程图。
22.图10是本发明的第二实施方式所涉及的车辆以及服务器的概要结构图。
23.图11是说明本发明的第二实施方式所涉及的行驶场景的一例的图。
24.图12是说明本发明的第二实施方式所涉及的车辆以及服务器的动作例的流程图。
25.图13是说明本发明的第二实施方式所涉及的车辆以及服务器的动作例的流程图。
26.图14是说明本发明的第二实施方式所涉及的车辆以及服务器的动作例的流程图。
27.图15是本发明的第三实施方式所涉及的车辆以及服务器的概要结构图。
28.图16是说明本发明的第三实施方式所涉及的行驶场景的一例的图。
29.图17是说明本发明的第三实施方式所涉及的优先级的一例的图。
30.图18是本发明的其它实施方式所涉及的车辆以及服务器的概要结构图。
具体实施方式
31.下面,参照附图对本发明的实施方式进行说明。在附图的记载中,对同一部分标注同一附图标记并省略说明。
32.(第一实施方式)
33.下面,参照附图对本发明的第一实施方式进行说明。在附图的记载中,对同一部分标注同一附图标记并省略说明。
34.参照图1来说明本实施方式所涉及的通信网络的整体概要。如图1所示,在本实施方式所涉及的通信网络中包括车辆a、车辆b、基站300、移动电话网310以及服务器400。
35.车辆a(移动体)具备通信部100,该通信部100具有通信功能。车辆b(其它移动体)具备通信部200,该通信部200具有通信功能。通信部100和通信部200例如包括天线、调制解调器、应用处理器、存储器等。通信部100和通信部200经由基站300及移动电话网310来与服务器400进行通信。基站300是不移动的固定的通信装置,是覆盖移动电话网310的接入点。另外,通信部100和通信部200能够经由基站300和服务器400进行相互通信。以下,将经由基站300和服务器400进行的通信部100与通信部200的通信定义为间接通信。在本实施方式中,使用移动电话网310、因特网以及服务器400来进行间接通信,但不限定于此,也可以使用其它无线通信方式(例如wifi热点及wifi网络上的服务器、移动电话网上封闭区域内的服务器等)。
36.并且,通信部100与通信部200也能够不经由基站300和服务器400而直接进行通信。以下,将这样的不经由基站300和服务器400的通信定义为直接通信。此外,直接通信也可以表现为车车间通信。在本实施方式中,车辆a和车辆b通过直接通信或间接通信来共享与车辆(车辆a、车辆b、还包括其它车辆)、道路信息等有关的多个数据。在多个数据中包含位置信息、速度信息、与行进方向有关的数据等。由于直接通信不经由基站300和服务器
400,因此能够以低延迟且简单的结构向对方发送数据。在无法通过直接通信发送的大的数据、以固定时间信息不变地重复发送时,使用间接通信。另外,在无法进行直接通信的情况下使用间接通信。
37.车辆a和车辆b既可以是具有自动驾驶功能的车辆,也可以是不具有自动驾驶功能的车辆。另外,车辆a和车辆b也可以是能够在自动驾驶与手动驾驶之间切换的车辆。在本实施方式中,将车辆a和车辆b设为具有自动驾驶功能的车辆来进行说明。
38.接着,参照图2对车辆a、车辆b以及服务器400的结构例进行说明。
39.首先,对车辆a的结构例进行说明。
40.如图2所示,车辆a具备上述通信部100、gps接收机101、传感器102以及控制器110。此外,通信部100、gps接收机101、传感器102以及控制器110也可以统一表现为信息处理装置。
41.gps接收机101通过接收来自人造卫星的电波来检测地面上的车辆a的位置信息。在gps接收机101所检测的车辆a的位置信息中包含纬度信息、经度信息以及时刻信息。gps接收机101将检测到的车辆a的位置信息输出到控制器110。此外,检测车辆a的位置信息的方法不限定于gps接收机101。例如,也可以使用被称为测程法(odometry)的方法来估计位置。测程法是通过根据车辆a的旋转角、旋转角速度求出车辆a的移动量和移动方向来估计车辆a的位置的方法。此外,gps(global positioning system:全球定位系统)是gnss(global navigation satellite system:全球导航卫星系统)的一部分。
42.传感器102搭载于车辆a,用于检测车辆a的信息以及车辆a的周围的物体。例如,传感器102检测道路上或道路周边的物体。传感器102由多个传感器构成。例如,传感器102包括车轮速度传感器、转向角传感器、陀螺仪传感器等。利用这些传感器检测车辆a的速度、转向角等。另外,传感器102包括摄像机、激光雷达(lidar:light detection and ranging)、无线探测和测距雷达(radar:radio detection and ranging)、毫米波雷达、激光测距仪、声纳等。利用这些传感器检测包括其它车辆(也包括车辆b)、摩托车、自行车、行人在内的移动物体以及包括障碍物、下落物、停车车辆在内的静止物体,来作为车辆a的周围的物体。在车辆a的周围存在其它车辆的情况下,检测其它车辆的识别编号、位置、速度、种类(车型)、高度、行进方向、过去的行驶轨迹、基于过去的行驶轨迹的将来的轨迹等,来作为具体的检测数据。传感器102将检测到的数据输出到控制器110。
43.控制器110是具备cpu(中央处理装置)、存储器以及输入输出部的通用的微型计算机。在微型计算机中安装有用于作为信息处理装置发挥功能的计算机程序。通过执行计算机程序,微型计算机作为信息处理装置所具备的多个信息处理电路而发挥功能。此外,在此示出通过软件来实现信息处理装置所具备的多个信息处理电路的例子,但当然也能够准备用于执行以下所示的各信息处理的专用的硬件来构成信息处理电路。另外,也可以利用单独的硬件来构成多个信息处理电路。控制器110具备通信控制部111和数据生成部112,来作为多个信息处理电路的一例。
44.通信控制部111基于通信环境来控制通信方式。在本实施方式中,通信环境包括接收强度、移动速度、多重反射、信道利用率以及自动删除率中的至少一个特性。移动速度是指车辆a和车辆b的车速。信道利用率表示与其它车辆或行人的终端等其它设备进行通信的利用率。自动删除率表示在超过了规定的信道利用率时,间隔剔除数据的比率。通信控制部
111在通信环境不好的情况下,从直接通信切换为间接通信。通信控制部111使用由通信环境判定部404判定出的通信环境,但不限定于此。通信控制部111也可以具备判定通信环境的功能。而且,通信控制部111也可以使用自身判定出的通信环境来控制通信方式。
45.数据生成部112生成要向车辆b发送的数据。在数据生成部112所生成的数据中包含开销(overhead)、包含车辆a的当前的位置信息的车辆信息、传感器数据等。以下,数据生成部112所生成的数据有时表现为消息。在开销中包含消息id、车辆a的固有的临时id、车辆a的认证码等。在车辆信息中,除了包含车辆a的当前的位置信息以外,还包含车辆a的速度信息、与行进方向有关的信息等。传感器数据是由传感器102检测到的数据。如上所述,在传感器数据中包含其它车辆的识别编号、位置、速度、种类(车型)、高度、行进方向、过去的行驶轨迹、基于过去的行驶轨迹的将来的轨迹等。消息的发送周期没有特别地限定,例如被设定为10hz。数据生成部112将所生成的数据输出到通信部100。
46.通信部100向车辆a的周围广播发送包含车辆a的当前的位置信息、行驶计划信息、由传感器探测到的物体数据等的数据包。在广播发送中使用直接通信方式。直接通信方式例如是依据ieee 802.11p的dsrc方式(频率:5.9ghz频带)或者依据3gpp release14以后的规格的蜂窝v2x方式。当前的位置信息是将表示车辆的位置的纬度、经度与获取到该位置时的时间建立了关联的数据。行驶计划信息是行驶计划数据,该行驶计划数据包含对车辆的将来位置关联了车速的车速计划数据以及将来的行驶路径数据。将来的行驶路径数据既可以是行驶到预先设定的目的地的行驶道路的路线信息,也可以是基于车速计划数据将将来位置(纬度、经度)与预定通过时刻建立了关联的数据。例如,行驶计划信息是对依据sae2735(dedicated short range communications(dsrc)message set dictionary:专用短程通信(dsrc)消息集词典)的消息的数据追加车速计划数据所得到的数据。表1中示出广播发送的车辆a位置数据的例子。车辆a位置数据作为包含头部和内容数据的包数据(package data),通过通信部100发送,并由车辆b的通信部200接收,或者经由基站300由服务器400的将来路径获取部401获取。
47.如表1所示,在车辆a位置数据的头部中存储有作为发送源的车辆a的识别编号和表示内容数据中包含的内容的类别的识别信息(例如,当前的位置信息、表示行驶计划信息的识别用的id)。在内容数据中存储有将纬度、经度与获取到这些信息的时间建立了关联的数据即当前的位置信息、行驶计划信息以及车辆的通信环境。通信环境包括接收强度、移动速度(车辆的移动速度以及车辆的通信目的地车辆的移动速度)、多重反射、信道利用率以及自动删除率。由车辆a的控制器110基于从gps接收机101和各种传感器102获取到的数据以及被预先记录到控制器110所具备的存储器中的数据,来生成这些头部和内容数据,从而生成车辆a位置数据。
48.表1
[0049][0050]
接着,对车辆b的结构例进行说明。
[0051]
如图2所示,车辆b具备上述的通信部200、gps接收器201以及控制器220。此外,通信部200、gps接收机201以及控制器220也可以统一表现为信息处理装置。
[0052]
gps接收机201的功能与gps接收机101的功能相同。与控制器110同样地,控制器220是具备cpu、存储器以及输入输出部的通用的微型计算机。控制器220具备通信控制部221和数据接收部222,来作为多个信息处理电路的一例。通信控制部221的功能与通信控制部111的功能相同。
[0053]
通信部200接收由车辆a的通信部100发送来的车辆a位置数据,并将接收到的车辆a位置数据输出到数据接收部222。数据接收部222从通信部200获取车辆a位置数据。通信部200接收到车辆a位置数据意味着在车辆a与车辆b之间建立了直接通信。因此,在通信部200接收到车辆a位置数据的情况下,通信控制部221向服务器400发送包含车辆a的当前的位置信息和车辆a的行驶计划信息的车辆a位置数据以及表示车辆b与车辆a之间建立了直接通信的信号等。此时,通信控制部221也将包含车辆b的当前的位置信息和车辆b的行驶计划信息的车辆b位置数据如表1所示的包数据那样一并发送到服务器400。此外,数据接收部222具有预先存储由数据生成部112生成的数据的格式并解释数据进行保存的功能。
[0054]
与控制器110同样地,服务器400是具备cpu、存储器以及输入输出部的通用的微型计算机。服务器400具备将来路径获取部401、位置预测部402、数据量估计部403、通信环境判定部404、可否判定部405以及通信计划生成部406,来作为多个信息处理电路的一例。
[0055]
将来路径获取部401基于经由基站300接收到的车辆a位置数据和车辆b位置数据,针对车辆a和车辆b分别获取当前的位置、行驶计划信息。将来路径获取部401既可以接收并获取从车辆b的通信部200发送来的这些数据,也可以构成为接收从车辆a的通信部100发送来的车辆a的位置数据(车辆a的当前的位置信息、行驶计划信息),并接收从车辆b的通信部200发送来的车辆b的位置数据(车辆b的当前的位置信息、行驶计划信息)。并且,服务器400既可以读出过去接收并存储到存储器中的行驶计划信息,也可以构成为向车辆a和车辆b分别请求行驶计划信息并接收该行驶计划信息。将来路径获取部401将获取到的行驶计划信息输出到位置预测部402。
[0056]
位置预测部402基于从车辆b获取到的车辆a和车辆b的位置信息以及从将来路径获取部401获取到的行驶计划信息,预测将来的车辆a和车辆b的将来位置。例如,位置预测部402基于所预测出的车辆a和车辆b的将来位置来预测将来的车辆b相对于车辆a的相对位
置及相对距离。位置预测部402将预测出的位置关系输出到通信环境判定部404。
[0057]
数据量估计部403针对车辆a通过直接通信发送到车辆b的数据量估计每1秒的数据量。具体地说,数据量估计部403估计每1秒发送了何种程度的数据量。数据量估计部403将估计出的数据量输出到通信环境判定部404。
[0058]
通信环境判定部404基于通过位置预测部402预测出的将来的车辆a与车辆b的位置关系来判定车辆a与车辆b之间的将来的通信环境。另外,通信环境判定部404对由数据量估计部403估计出的数据量中的能够通过直接通信发送的数据量进行估计。在数据量的估计中,使用表示其它车辆、行人等进行通信的状况的信道利用率以及表示在超过了规定的信道利用率时间隔剔除数据的比率的数据自动删除率。这些信道利用率和数据自动删除率例如适用于saej2945/1等。
[0059]
可否判定部405将由数据量估计部403估计出的数据量与由通信环境判定部404估计出的数据量进行比较。可否判定部405基于比较结果来判定是否能够通过直接通信发送由数据量估计部403估计出的全部数据量。可否判定部405将判定结果输出到通信计划生成部406。
[0060]
通信计划生成部406基于从可否判定部405获取到的判定结果,来确定车辆a要向车辆b发送的数据量中的能够通过直接通信发送的数据量以及无法通过直接通信发送的数据量。然后,通信计划生成部406制作用于通过直接通信发送能够通过直接通信发送的数据量的通信计划和用于通过间接通信发送无法通过直接通信发送的数据量的通信计划。另外,通信计划生成部406将制作出的通信计划发送给车辆a和车辆b。
[0061]
(数据量估计方法)
[0062]
接着,参照图3对由数据量估计部403估计出的数据量的估计方法的一例进行说明。
[0063]
如图3所示,在车辆a通过直接通信发送到车辆b的数据量中包含开销、含有车辆a的当前的位置信息的车辆信息、车辆a的过去的行驶轨迹及行驶计划信息、周围的物体的识别信息以及传感器数据。
[0064]
在含有车辆a的当前的位置信息的车辆信息中包含车辆a的速度信息、与行进方向有关的信息等。在周围的物体的识别信息中包含车辆a(传感器102)所识别出的、车辆a的周围的其它车辆的台数(在图3所示的例子中为11台)。在传感器数据中包含8个数据。8个数据是其它车辆的识别编号、位置、速度、种类(车型)、高度、行进方向、过去的行驶轨迹以及基于过去的行驶轨迹的将来的轨迹。
[0065]
数据量估计部403根据数据容器(container)的内部信息来估计图3所示的数据的单位量。例如对于数据单位量,开销被估计为200bytes、包含车辆a的当前的位置信息的车辆信息被估计为40bytes、与车辆a的过去的行驶轨迹有关的信息及行驶计划信息被估计为600bytes、周围的物体的识别信息被估计为600bytes、传感器数据被估计为3mbytes。
[0066]
然后,数据量估计部403基于所估计出的数据单位量来估计每1秒的最大数据量。例如,在车辆a的周围包括车辆b在内存在11台车辆且由传感器102获取到的数据的种类为8种的情况下,如图3所示那样估计出每1秒的最大数据量为24mbytes 7440bytes。
[0067]
(通信环境判定方法)
[0068]
接着,参照图4~图5来说明由通信环境判定部404进行的通信环境判定的一例。
[0069]
通信环境判定部404基于车辆a与车辆b的位置关系来估计电波强度。电波强度是表示电波的强度的指标。参照图4对车辆a与车辆b的位置关系的一例进行说明。在图4所示的场景中,车辆a在单车道道路上直行。车辆b在单侧三车道道路的中央车道上直行。车辆a行驶的道路与车辆b行驶的道路交叉。车辆a和车辆b以40km/h的速度在距交叉路口500m远的近前地点行驶。在将车辆a的位置坐标设为(xa、ya)、将车辆b的位置坐标设为(xb、yb)的情况下,车辆a与车辆b的在直线上的距离d(以下简称为距离d)用式1表示。此外,将位置坐标(xa、ya)、(xb、yb)设为初始位置。
[0070]
[数1]
[0071]
d={(yb
‑
ya)^2 (xb
‑
xa)^2}^1/2
…
(1)车辆a和车辆b将来会行驶的路径由将来路径获取部401获取。在图4所示的场景中,车辆a和车辆b将来会行驶的路径是直行路径。位置预测部402基于由将来路径获取部401获取到的路径来预测将来的车辆a与车辆b的位置关系。由于车辆a和车辆b以40km/h的速度行驶,因此随着车辆a和车辆b接近交叉路口,距离d逐渐变短。距离d在初始位置处为最大值,在交叉路口附近为最小值。电波强度根据距离d、即根据车辆a与车辆b的位置关系而变化。因此,通信环境判定部404按从距离d的最大值到最小值的每个距离来评价电波强度的衰减。此外,距离d的最小值也可以被设定为零。在电波强度的衰减的评价中使用式2。
[0072]
[数2]
[0073][0074]
在此,pt[dbm]是发送机的执行辐射功率,一般由法规上的天线功率上限值来决定。gr[db]是接收机的增益。λ[m]是载波频率的波长。π是圆周率。
[0075]
一般来说,由于道路面与车辆的天线的高度不同,因此路面反射波与直接通信波互相重叠。因此,已知接收功率与从道路面到天线的距离相应地大幅地变动的现象。通信环境判定部404使用式3和式4来评价该现象。
[0076]
[数3]
[0077][0078]
[数4]
[0079][0080]
在此,ht是车辆a的天线的高度。在车辆a的位置信息中包含ht的情况下使用该值。在车辆a的位置信息中不包含ht且车辆a是大型车辆的情况下,基于车辆a的高度例如将ht设定为3.5m。在除此以外的情况下,基于轿车类型的一般高度,例如将ht设定为1.55m。此外,大型车辆例如是卡车、公共汽车等。此外,在车辆a向车辆b发送的数据中也可以包含车辆a是否为大型车辆。
[0081]
hr是车辆b的天线的高度。hr的设定与ht的设定相同,因此省略说明。另外,使用了上述的式2~式4的评价方法一般是已知的,因此省略说明。
[0082]
在估计出电波强度之后,通信环境判定部404对与通信部200的发送接收数据速率相应的最低接收灵敏度pr_min[dbm]进行评价,来评价能够以发送接收数据速率进行通信
的距离范围。具体地说,通信环境判定部404按每个距离评价通信部200的接收强度。例如在使用its频率(5.9ghz频带)的情况下,基于因无线的中心频率和接收电场强度的变动因素(大地反射的2波模型)而产生的拐点,距离d的解析间隔被设定为1m。也就是说,作为一例,每个距离是指每1m。
[0083]
在图5中示出评价结果。如图5所示,通信环境被分类为环境级别1~5。环境级别1意味着通信环境最好,环境级别5意味着通信环境最差。在路径的所有地点(以下,有时称为整个区间)接收强度高于接收灵敏度的10倍的情况下,通信环境被分类为环境级别1。更为详细地说,在接收强度高于最低接收功率的10倍的情况下,通信环境被分类为环境级别1。最低接收功率是指能够确保通信所需的接收品质的最小的接收功率。
[0084]
另外,在整个区间内接收强度高于接收灵敏度的10倍的情况下,通信环境被分类为环境级别2。更为详细地说,在接收强度高于平均接收功率的10倍的情况下,通信环境被分类为环境级别2。另外,在整个区间内接收强度与接收灵敏度相等或者为接收灵敏度的10倍左右的情况下,通信环境被分类为环境级别3。
[0085]
在路径的一部分地点(以下,有时称为一部分区间)接收强度与接收灵敏度相等的情况下,通信环境被分类为环境级别4。另外,在一部分区间内接收强度为接收灵敏度以下的情况下,通信环境被分类为环境级别5。在环境级别1~3的情况下,能够在整个区间内进行直接通信。另一方面,在环境级别4~5的情况下,在一部分区间内难以进行直接通信。此外,在一部分区间内接收强度为接收灵敏度以下的情况下,记录相应的区间。
[0086]
这样,通信环境判定部404按每个距离评价接收强度所得到的结果是,在整个区间内接收强度超过阈值的情况下判定为能够在整个区间内进行直接通信。由此,通信环境判定部404设想偶然实现了直接通信的初始连接的情况或由于路面反射等的影响而急剧地发生衰减的情况,能够判别对方是否不再进行通信还是通信仅被暂时中断。另外,通信环境判定部404估计通信方式的调制方式与接收强度相应地被切换为直接通信的可能性,在环境级别1的情况下,判定为相对于环境级别3(例如,调制方式qpsk)而言调制效率约为16倍(64qam),相对于环境级别2而言调制效率约为8倍(16qam)。此外,阈值也可以被定义为接收灵敏度。
[0087]
另外,通信环境判定部404估计能够通过直接通信发送的数据量。具体地说,如图5所示,通信环境判定部404在通信环境为环境级别1且频率扩展为基准带宽的2倍的情况下,计算出数据传输预计量为9600bytes。
[0088]
接着,通信环境判定部404基于信道利用率(channel busy rate)和数据自动删除率来估计数据削减预计率。一般来说,在直接通信中,将信道利用率控制为在v2x(vehicle to everything communication:车与外界的信息交换)中设定的基准的30%~70%。详细内容请参照下述文献。sae j2945/1,correction on congestion control for v2x sidelink communication in ts 36.321
[0089]
超过在v2x中设定的基准的部分的消息被间隔剔除。通过2个指标的测量来执行消息的间隔剔除。一个是信道利用率的测量,另一个是基于序列性的消息接收监视(1秒钟)的消息丢失测量。
[0090]
首先,对信道利用率的测量进行说明。通信环境判定部404基于车辆a的通信部100和车辆b的通信部200来测定信道利用率的当前状况。通信环境判定部404根据所测定出的
信道利用率,分别求出当前的削减预计率。通信环境判定部404采用信道利用率差的一方的结果。接着,通信环境判定部404估计将来的路径上的拥挤状况。具体地说,在路径上车辆a和车辆b中的某一方的前方存在前车(先行車)的情况下,通信环境判定部404估计为有拥挤的可能性,将环境级别降低1个级别而估计为通信环境变差(参照图6)。
[0091]
接着,对数据自动删除率进行说明。在车辆a的通信环境不好的情况下,以间隔剔除的方式发送消息。通信环境判定部404基于v2v消息的计数器监视来测量数据删除倾向。在测量出平均1秒发生1~3次的间隔剔除的情况下,将削减预计率设定为1/3。在检测出在1秒的期间完全没有收到消息的情况下,通信环境判定部404将删除率设定为100%。另外,通信环境判定部404设定为在平均每5秒间隔剔除率波动的情况下删除2/3左右。
[0092]
例如在如图6所示那样信道利用率的测量值为18%且之后不存在拥挤可能性的情况下,通信环境判定部404将削减预计率设为1/2。另外,通信环境判定部404例如在检测出存在1次消息的间隔剔除且之后不存在拥挤可能性的情况下,将削减预计率设为1/3。结果,在整个区间内数据预计量为9600
×
1/2
×
1/3即1600bytes。通信环境判定部404估计出该1600bytes是能够通过直接通信发送的数据量。通信环境判定部404向可否判定部405输出估计值(1600bytes)。
[0093]
可否判定部405将由数据量估计部403估计出的数据量与由通信环境判定部404估计出的数据量进行比较。可否判定部405基于比较结果来判定是否能够通过直接通信发送由数据量估计部403估计出的全部数据量。如在图3中所说明的那样,由数据量估计部403估计出的数据量是24mbytes 7440bytes。另一方面,由通信环境判定部404估计出的数据量是1600bytes。因而,可否判定部405判定为无法通过直接通信发送由数据量估计部403估计出的全部数据量。可否判定部405将判定结果输出到通信计划生成部406。
[0094]
通信计划生成部406基于从可否判定部405获取到的判定结果,来确定车辆a要向车辆b发送的数据量中的能够通过直接通信发送的数据量和无法通过直接通信发送的数据量。在本实施方式中,能够通过直接通信发送的数据量是1600bytes,无法通过直接通信发送的数据量是24mbytes 5840bytes。通信计划生成部406制作用于通过直接通信发送能够通过直接通信发送的数据量的通信计划和用于通过间接通信发送无法通过直接通信发送的数据量的通信计划。
[0095]
另外,通信计划生成部406以优先级越高的数据越选择直接通信的方式来制作通信计划。由于车辆a能够通过直接通信发送1600bytes的数据,因此通信计划生成部406选择优先级高的数据来制作1600bytes的数据。参照图7来说明优先级高的数据。在本实施方式中,图7所示的开销的优先级最高,传感器数据的优先级最低。也就是说,从开销朝向传感器数据,优先级变低。
[0096]
如果将开销、包含车辆a的当前的位置信息的车辆信息、与车辆a的过去的行驶轨迹有关的信息及行驶计划信息相加,则如图7所示那样成为840bytes。因此,这些数据能够通过直接通信进行发送。因而,通信计划生成部406以通过直接通信发送这些数据的方式来制作通信计划。能够通过直接通信发送的数据量的余量是760bytes。因此,能够通过直接通信发送1台其它车辆的识别信息(600bytes)。以上,通信计划生成部406以能够通过直接通信发送开销、包含车辆a的当前的位置信息的车辆信息、与车辆a的过去的行驶轨迹有关的信息及行驶计划信息、以及1台其它车辆的识别信息的方式来制作通信计划。也就是说,通
过直接通信发送的数据量为1440bytes。如图7所示,通信计划生成部406以通过间接通信发送剩余的数据量(24mbytes 6000bytes)的方式来制作通信计划。然后,通信计划生成部406将制作出的通信计划发送给车辆a和车辆b。由此,车辆a和车辆b能够在切断直接通信之前预先连接到间接通信,因此能够实现顺畅的数据共享。
[0097]
接着,参照图8~图9所示的流程图对车辆a、车辆b以及服务器400的动作例进行说明。
[0098]
在步骤s101中,车辆a使用gps接收机101检测车辆a的位置信息。处理进入步骤s103,车辆a检测与车辆b共享的数据。与车辆b共享的数据是车辆a的位置信息、速度信息以及与行进方向有关的信息。此外,在步骤s101中检测了车辆a的位置信息。在与车辆b共享的数据中也包含其它车辆的识别编号、位置、速度、种类(车型)、高度、行进方向、过去的行驶轨迹、基于过去的行驶轨迹的将来的轨迹等。处理进入步骤s105,车辆a向车辆a的周围广播发送在步骤s101和步骤s103中检测到的数据。
[0099]
处理进入步骤s107,车辆b从车辆a接收数据。处理进入步骤s109,车辆b使用gps接收机201检测车辆b的位置信息。处理进入步骤s111,车辆b向服务器400发送车辆a的位置信息、车辆b的位置信息以及表示与车辆a之间建立了直接通信的信号等。
[0100]
处理进入步骤s113,服务器400从车辆b接收数据。处理进入步骤s115,服务器400获取车辆a和车辆b的行驶计划信息。进入步骤s117,服务器400基于在步骤s115中获取到的行驶计划信息来预测车辆a与车辆b的将来的位置关系。处理进入步骤s119,服务器400针对车辆a通过直接通信发送到车辆b的数据量估计每1秒的数据量。在本实施方式中,估计出每1秒的最大数据量如图3所示那样为24mbytes 7440bytes。
[0101]
处理进入步骤s121,服务器400基于在步骤s117中预测出的车辆a与车辆b的将来的位置关系来判定车辆a与车辆b之间的将来的通信环境。其结果,如图5所示,通信环境被分类为环境级别1~5。另外,服务器400对在步骤s119中估计出的数据量中的能够通过直接通信发送的数据量(上限值)进行估计。在该估计中使用信道利用率和数据自动删除率。
[0102]
处理进入步骤s125,服务器400将在步骤s119中估计出的数据量与在步骤s123中估计出的数据量进行比较。服务器400基于比较结果来判定是否能够通过直接通信发送在步骤s119中估计出的全部数据量。在能够通过直接通信发送在步骤s119中估计出的全部数据量的情况下(在步骤s125中为“是”),车辆a和车辆b继续进行直接通信。
[0103]
另一方面,在无法通过直接通信发送在步骤s119中估计出的全部数据量的情况下(在步骤s125中为“否”),处理进入步骤s127,服务器400确定车辆a向车辆b发送的数据量中的能够通过直接通信发送的数据量和无法通过直接通信发送的数据量。然后,服务器400制作用于通过直接通信发送能够通过直接通信发送的数据量的通信计划和用于通过间接通信发送无法通过直接通信发送的数据量的通信计划。并且,服务器400以优先级越高的数据越选择直接通信的方式制作通信计划。
[0104]
处理进入步骤s129,服务器400向车辆a和车辆b发送在步骤s127中制作出的通信计划。处理进入步骤s131、s133,车辆a和车辆b接收通信计划。处理进入步骤s135、s137,车辆a和车辆b基于通信计划进行通信。
[0105]
(作用和效果)
[0106]
根据第一实施方式,判定将来的通信环境,判定是否能够通过直接通信发送应该
发送的数据量。基于判定结果,分别针对直接通信和间接通信制作通信计划,并向车辆a和车辆b发送通信计划。由此,车辆a和车辆b能够在切断直接通信之前预先连接到间接通信。由此,从直接通信切换到间接通信时的初始连接所需的时间减少,因此能够实现顺畅的数据共享。另外,在车辆a与车辆b之间建立了直接通信时,判定在之后的将来会行驶的路径中是否能够维持直接通信。如果将来能够维持直接通信,则通过直接通信来共享位置信息等,因此例如能够有余量地制定与自动驾驶辅助有关的计划。
[0107]
另外,根据本实施方式,以在多个数据中优先级越高的数据越选择直接通信的方式来制作通信计划。如上所述,直接通信能够以低延迟且简单的结构向对方发送数据,因此优先级高的数据的共享实现高速化。
[0108]
另外,根据本实施方式,确定要向车辆b发送的数据量中的能够通过直接通信发送的数据量和无法通过直接通信发送的数据量。然后,制作用于通过直接通信发送能够通过直接通信发送的数据量的通信计划和用于通过间接通信发送无法通过直接通信发送的数据量的通信计划。能够通过直接通信发送想要提前共享的数据,并能够通过间接通信发送剩余的数据。
[0109]
(第二实施方式)
[0110]
接着,参照图10来说明本发明的第二实施方式。第二实施方式与第一实施方式的不同之处在于:服务器400还具备道路信息获取部407和拥挤估计部408。关于与第一实施方式重复的结构,引用附图标记并省略其说明。下面,以不同点为中心进行说明。
[0111]
道路信息获取部407获取地图信息(包含道路构造、道路的车道数、道路上的建筑物等)、拥堵信息、邻近的停车场的空闲状况、事故信息、施工信息、信号灯信息等。道路信息获取部407既可以从车辆b获取这些信息,也可以从因特网上的云获取这些信息。车辆b能够通过v2i(vehicle to infr astructure:车与基础设施之间的信息交换)获得这些信息,并将这些信息提供给服务器400。v2i是在车辆与设置在道路上的通信设备之间交换信息的技术,有时被称为路车间通信。并且,车辆b也能够使用v2i获取与前车有关的信息。此外,车辆b也可以使用未图示的传感器获取与前车有关的信息。另外,车辆b能够使用未图示的传感器检测车辆b的周围的车辆是否变更车道。例如,车辆b能够通过检测周围的车辆的方向指示器有无点亮来检测有无变更车道。此外,在由车辆a检测到的信息中也可以包含这些信息。道路信息获取部407将获取到的信息输出到拥挤估计部408。
[0112]
拥挤估计部408基于从道路信息获取部407获取到的信息来估计车辆a和车辆b将来会行驶的路径的拥挤。参照图11来说明这一点。在图11所示的例子中,对车辆b将来会行驶的路径的拥挤进行说明,但对于车辆a也同样。如图11所示,在车辆b的前方存在前车c且车辆b的速度比规定速度慢的情况下,估计为车辆b将来会行驶的路径拥挤。或者,在如图11所示那样车辆b将来会行驶的路径上的信号灯500为红色的情况下,估计为车辆b将来会行驶的路径拥挤。或者,在车辆b将来会行驶的路径上的邻近的停车场车满的情况下,估计为车辆b将来会行驶的路径拥挤。或者,在车辆b将来会行驶的路径上检测到拥堵信息的情况下,估计为车辆b将来会行驶的路径拥挤。或者,在车辆b将来会行驶的路径上检测到事故信息或施工信息的情况下,估计为车辆b将来会行驶的路径拥挤。或者,在车辆b将来会行驶的路径上检测到其它车辆的车道变更的情况下,估计为车辆b将来会行驶的路径拥挤。拥挤估计部408将估计结果输出到通信环境判定部404。
[0113]
通信环境判定部404基于从拥挤估计部408获取到的信息来校正信道利用率测量结果。作为校正方法的一例,通信环境判定部404基于车道数、拥挤度以及车载器的普及率来校正信道利用率测量结果。在本实施方式中,车载器是用于进行如通信部100和通信部200那样的直接通信或间接通信的设备。校正式表现为到交叉路口的距离/(车头时间
×
车速)
×
车道数
×
普及率。在图11所示的场景中假定以下情况。即,假定为从车辆b到交叉路口的距离为400m,当前的信道利用率为10%,车头时间为3秒,车辆b的车速为40km/h,车道数为三车道,车辆b的周围的车辆的台数为46台,车载器的普及率为50%。如果在上述校正式中应用该假定,则校正后的信道利用率为23%。因而,通信环境判定部404将通信环境变更为环境级别2(参照图5)。此外,设想信道利用率占据了每1台车辆的1毫秒的信道的情况。另外,在校正后的信道利用率比当前的信道利用率小的情况下,使用当前的信道利用率。也可以通过基于已知的统计值或来自云服务器上的动向、过去的数据通信状况进行估计等来生成普及率的数据。
[0114]
接着,参照图12~图14所示的流程图对车辆a、车辆b以及服务器400的动作例进行说明。但是,步骤s201~步骤221、步骤223~步骤237的处理与图8~图9所示的步骤s101~步骤121、步骤123~步骤137所示的处理相同,因此省略说明。
[0115]
在步骤s221a中,服务器400判定车辆b的速度是否比规定速度慢。在车辆b的速度比规定速度慢的情况下(在步骤s221a中为“是”),处理进入步骤s221b。另一方面,在车辆b的速度为规定速度的情况下(在步骤s221a中为“否”),处理进入步骤s221c。在步骤s221b中,服务器400判定在车辆b的前方是否存在前车c。在车辆b的前方存在前车c的情况下(在步骤s221b中为“是”),处理进入步骤s221h。另一方面,在车辆b的前方不存在前车c的情况下(在步骤s221b中为“否”),处理进入步骤s221c。
[0116]
在步骤s221c中,服务器400判定车辆b将来会行驶的路径上的信号灯500是否为绿色。在车辆b将来会行驶的路径上的信号灯500为绿色的情况下(在步骤s221c中为“是”),处理进入步骤s221d。另一方面,在车辆b将来会行驶的路径上的信号灯500为红色的情况下(在步骤s221c中为“否”),处理进入步骤s221h。在步骤s221d中,服务器400判定车辆b将来会行驶的路径上的邻近的停车场是否有空闲。在停车场有空闲的情况下(在步骤s221d中为“是”),处理进入步骤s221e。另一方面,在停车场车满的情况下(在步骤s221d中为“否”),处理进入步骤s221h。
[0117]
在步骤s221e中,服务器400判定在车辆b将来会行驶的路径上是否存在拥堵信息。在存在拥堵信息的情况下(在步骤s221e中为“是”),处理进入步骤s221f。另一方面,在不存在拥堵信息的情况下(在步骤s221e中为“否”),处理进入步骤s221h。在步骤s221f中,服务器400判定在车辆b将来会行驶的路径上是否存在事故信息或施工信息。在存在事故信息或施工信息的情况下(在步骤s221f中为“是”),处理进入步骤s221g。另一方面,在不存在拥堵信息的情况下(在步骤s221f中为“否”),处理进入步骤s221h。
[0118]
在步骤s221g中,服务器400判定在车辆b将来会行驶的路径上其它车辆是否变更车道。在其它车辆变更车道的情况下(在步骤s221g中为“是”),处理进入步骤s223。另一方面,在其它车辆没有变更车道的情况下(在步骤s221g中为“否”),处理进入步骤s221h。处理进入步骤s221h意味着估计为车辆b将来会行驶的路径拥挤。因此,在步骤s221h中,服务器400基于车道数、拥挤度以及车载器的普及率来校正信道利用率测量结果。之后,处理进入
步骤s223。
[0119]
(作用和效果)
[0120]
这样,通信环境判定部404通过基于拥挤的估计结果校正信道利用率,能够高精度地判定通信环境。
[0121]
(第三实施方式)
[0122]
接着,参照图15来说明本发明的第三实施方式。第三实施方式与第二实施方式的不同之处在于:车辆a还具备发送顺序决定部113。关于与第二实施方式重复的结构,引用附图标记并省略其说明。以下,以不同点为中心进行说明。
[0123]
发送顺序决定部113决定要向车辆b发送的数据的发送顺序。具体地说,如图16所示,发送顺序决定部113基于从车辆b到交叉路口的距离、车辆b的速度等,从车辆a所检测到的周围物体的信息中决定对于车辆b来说需要注意的信息的优先级。然后,发送顺序决定部113决定从优先级高的数据起按顺序进行发送。通信部100按照由发送顺序决定部113决定的顺序向车辆b发送数据。此外,也可以是,优先级越高的数据越选择直接通信。如图16所示,周围物体是在车辆a的前方行驶的前车c、前前车(先々行車)d。周围物体的信息是前车c和前前车d的位置信息、速度信息等。
[0124]
作为发送顺序的决定方法的一例,能够使用到达交叉路口的时间(以下,称为预计到达时间)。例如,如图16所示那样假定前车c以40km/h的速度在距交叉路口350m远的近前地点行驶、前前车d以50km/h的速度在距交叉路口150m远的近前地点行驶、车辆b以45km/h的速度在距交叉路口400m远的近前地点行驶。此外,设为车辆b、前车c以及前前车d的位置信息、速度信息等预先由车辆a检测。在该情况下,预计到达时间用式5表示。
[0125]
[数5]
[0126]
预计到达时间=从物体到交叉路口的距离/物体的速度
…
(5)
[0127]
发送顺序决定部113决定从预计到达时间早的物体的数据起先进行发送。在此,根据上述式5,前车c的预计到达时间约为32秒,前前车d的预计到达时间约为11秒。因此,前前车d比前车c先到达交叉路口。因此,发送顺序决定部113按前前车d、前车c的顺序发送数据。也就是说,发送顺序决定部113判断为前前车d的优先级比前车c的优先级高。
[0128]
另外,发送顺序决定部113也可以基于物体与车辆b的相对距离来决定数据的优先级。具体地说,也可以是,物体与车辆b的相对距离越短,发送顺序决定部113越提高优先级。例如,如图16所示,前前车d与车辆b的相对距离是550m,前车c与车辆b的相对距离是750m。在该情况下,发送顺序决定部113判断为前前车d的优先级比前车c的优先级高。
[0129]
另外,发送顺序决定部113也可以基于物体与车辆b的相对速度来决定数据的优先级。相对速度的基准既可以是物体,也可以是车辆b。也可以是,物体与车辆b的相对速度越快,发送顺序决定部113越提高优先级。例如,在图16所示的例子中,由于前前车d与车辆b相向,因此前前车d与车辆b的相对速度为95km/h。同样地,由于前车c与车辆b也相向,因此前车c与车辆b的相对速度为85km/h。在该情况下,发送顺序决定部113判断为前前车d的优先级比前车c的优先级高。
[0130]
另外,发送顺序决定部113也可以基于物体的种类来决定数据的优先级。例如,在图16所示的前前车d是公共汽车、卡车等大型车辆、图16所示的前车c是普通自动的情况下,发送顺序决定部113判断为前前车d的优先级比前车c的优先级高。
[0131]
另外,发送顺序决定部113也可以基于交叉路口的交通规则以及交错可能性来决定数据的优先级。具体地说,发送顺序决定部113基于交叉路口的交通规则以及交错可能性,以5个等级(级别1~级别5)评价优先级。优先级在级别1最高,在级别5最低。参照图17来说明详细情况。图17使用图16所示的场景。
[0132]
如图17所示,在车辆b在对面道路上行驶并在交叉路口右转、并且车辆a、前车c以及前前车d在交叉路口直行的情况下,车辆b在交叉路口成为非优先侧。车辆b有可能与前前车d或前车c交错。因而,发送顺序决定部113判断为前车c和前前车d的数据的优先级是级别1。
[0133]
另一方面,在车辆b在对面道路上行驶并在交叉路口右转、并且车辆a、前车c以及前前车d也在交叉路口右转的情况下,车辆b几乎不可能与前前车d或前车c交错。因而,发送顺序决定部113判断为前车c和前前车d的数据的优先级是级别5。同样地,发送顺序决定部113基于交叉路口处的交错可能性以及交叉路口处的优先、非优先来决定优先级。发送顺序决定部113决定为优先级越高的数据越选择直接通信。在图17所示的例子中,发送顺序决定部113例如在判断为优先级是级别1或级别2的情况下,决定为前前车d和前车c的数据选择直接通信。
[0134]
这样,发送顺序决定部113根据物体(前车c和前前车d)到达交叉路口的时间、物体与车辆b的相对距离、物体与车辆b的相对速度、物体的种类、交叉路口的交通规则中的至少一者来决定优先级。然后,发送顺序决定部113决定为优先级越高的数据越选择直接通信。由此,使优先级高的数据的共享高速化。
[0135]
能够通过1个或多个处理电路来安装上述的实施方式中记载的各功能。处理电路包括含有电路的处理装置等被编程的处理装置。处理电路还包括被布局为执行所记载的功能的面向特定用途的集成电路(asic)、电路部件等装置。
[0136]
如上所述,记载了本发明的实施方式,但不应该理解为构成该公开的一部分的论述以及附图用于限定本发明。根据该公开,本领域技术人员能够明白各种替代实施方式、实施例以及运用技术。
[0137]
服务器400的通信环境判定部404也可以确定将来的直接通信的通信环境中的不满足规定的基准的期间。规定的基准是表示难以进行直接通信的指标,例如是如图5所示那样接收强度为通信部100的接收灵敏度以下的情况。而且,通信环境判定部404也可以制作用于仅在不满足规定的基准的期间从直接通信切换为间接通信的通信计划。由此,能够仅在通信环境劣化的情况下从直接通信切换为间接通信,从而实现与通信环境相应的顺畅的数据共享。
[0138]
另外,通信环境判定部404也可以在探测到信道的多路复用的情况下制作用于从直接通信切换为间接通信的通信计划。由此,能够仅在探测到信道的多路复用的情况下从直接通信切换为间接通信,从而实现与通信环境相应的顺畅的数据共享。
[0139]
另外,服务器400也可以至少从车辆a和车辆b中的一方接收与通信计划可否有关的数据。与通信计划的可否有关的数据是与是否能够按照通信计划从直接通信切换为间接通信有关的数据。通过接收与通信计划的可否有关的数据,能够共用一方的车载器的处理。
[0140]
此外,在上述实施例中,由服务器400实施通信环境的判定、通信计划的制作等,但不限定于此。例如,也可以如图18所示那样由车辆a实施通信环境的判定、通信计划的制作
等。如图18所示,车辆a的控制器110所具备的将来路径获取部114、位置预测部115、数据量估计部116、通信环境判定部117、可否判定部118以及通信计划生成部119的各功能与图2所示的将来路径获取部401、位置预测部402、数据量估计部403、通信环境判定部404、可否判定部405以及通信计划生成部406的各功能相同。
[0141]
即,控制器110能够基于移动体和其它移动体将来会行驶的位置信息、与将来会行驶的位置信息相应的将来的直接通信的通信环境信息、以及移动体将来会向其它移动体发送的数据量信息或会从其它移动体接收的数据量信息,来判定是否能够通过直接通信发送或接收与数据量信息有关的数据量,在判定为无法通过直接通信发送或接收数据量的情况下,针对直接通信和间接通信中的至少任一方制作移动体与其它移动体之间的通信计划信息,并向其它移动体发送通信计划信息。通信计划信息是与通信计划有关的信息。上述通信计划也可以被替换为通信计划信息。数据量信息是与数据量有关的信息。另外,通信环境信息包含接收强度、移动速度、多重反射、信道利用率或自动删除率信道利用率中的任一个。
[0142]
另外,控制器110能够从多个数据中基于优先级优先选择直接通信来制作通信计划信息。另外,控制器110能够确定会向其它移动体发送的数据量中的能够通过直接通信发送的数据量或无法通过直接通信发送的数据量,来制作用于通过直接通信发送能够通过直接通信发送的数据的通信计划信息、或者用于通过间接通信发送无法通过直接通信发送的数据的通信计划信息。另外,控制器110能够基于对信道的多路复用的探测或预测来制作用于从直接通信切换为间接通信的通信计划信息。
[0143]
图18所示的车辆a的控制器110也可以确定将来的直接通信的通信环境中的不满足规定的基准的期间。而且,车辆a的控制器110也可以制作用于仅在不满足规定的基准的期间从直接通信切换为间接通信的通信计划。另外,车辆a的控制器110也可以在探测到信道的多路复用的情况下制作用于从直接通信切换为间接通信的通信计划。另外,车辆a的控制器110也可以从车辆b接收与通信计划可否有关的数据。
[0144]
此外,也可以由车辆b实施通信环境的判定、通信计划的制作等。或者,通信环境的判定、通信计划的制作等既可以由移动电话网上的移动边缘计算机来实施,也可以由因特网上的服务器来实施。
[0145]
附图标记说明
[0146]
100:通信部;101:gps接收机;102:传感器;110:控制器;111:通信控制部;112:数据生成部;113:发送顺序决定部;114:将来路径获取部;115:位置预测部;116:数据量估计部;117:通信环境判定部;118:可否判定部;119:通信计划生成部;200:通信部;201:gps接收机;220:控制器;221:通信控制部;222:数据接收部;300:基站;310:移动电话网;400:服务器;401:将来路径获取部;402:位置预测部;403:数据量估计部;404:通信环境判定部;405:可否判定部;406:通信计划生成部;407:道路信息获取部;408:拥挤估计部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。