1.本实用新型涉及清洁机器人领域,特别是涉及一种拖布组件及清洁机器人。
背景技术:
2.清洁机器人,又称自动打扫机、智能吸尘器、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地面清理工作。
3.清洁机器人的底盘配置有拖布支架,拖布支架连接有用于清理地面的拖布。
4.目前,拖布支架通过一些转接件连接底盘,零部件较多,导致成本较高。
技术实现要素:
5.本实用新型实施例旨在提供一种拖布组件及清洁机器人,以解决现有技术中拖布支架与底盘之间的零部件较多的技术问题。
6.本实用新型实施例解决其技术问题采用以下技术方案:提供一种拖布组件,包括:
7.拖布支架,用于连接所述清洁机器人的底盘,所述拖布支架包括支架主体和支撑部,所述支撑部与所述支架主体一体设置,所述支撑部突出于所述支架主体靠近所述底盘的一侧,用于抵接所述底盘,提供所述支架主体远离所述底盘的抵触力;
8.拖布,连接于所述支架主体。
9.在一些实施例中,所述支撑部包括连接端和抵接端;
10.所述连接端与所述支架主体一体成型,所述抵接端突出于所述支架主体靠近所述底盘的一侧,用于抵接所述底盘;
11.所述抵接端被配置为可在外部压力的作用下相对所述连接端活动,其中,在外部压力的作用下相对所述连接端活动至靠近所述支架主体的位置,并在外部压力撤销后,在所述抵触力的作用下复位至相对远离所述支架主体的位置。
12.在一些实施例中,所述抵接端具有凸面;
13.所述凸面位于所述抵接端的突出于所述支架主体的部位,用于抵接所述底盘。
14.在一些实施例中,所述抵接端具有凹面;
15.所述凹面位于所述抵接端的背离所述底盘的部位上,并且与所述凸面相对设置。
16.在一些实施例中,所述凸面与所述凹面之间的最大间距不超过预设距离阈值。
17.在一些实施例中,所述连接端包括两个岔部,所述两个岔部与所述支架主体一体成型。
18.在一些实施例中,所述支架主体对应所述支撑部处设有凹槽;
19.所述支撑部在所述支架主体上的正投影落在所述凹槽所在区域内,所述支撑部可相对于所述支架主体活动至伸出或收缩于所述凹槽的位置。
20.在一些实施例中,所述支撑部包括连接端和相对所述连接端设置的抵接端;
21.所述连接端收容于所述凹槽内,并与所述支架主体一体设置,所述抵接端伸出所述凹槽。
22.本实用新型实施例解决其技术问题还采用以下技术方案:提供一种清洁机器人,包括:
23.底盘;
24.如上所述的拖布组件,连接于所述底盘。
25.与现有技术相比,在本实用新型实施例提供的拖布组件及具有此拖布组件的清洁机器人中,通过将支撑部与支架主体一体成型,并抵接于底盘,可使得本实施例的拖布组件与底盘之间的零部件较少,从而降低制造成本。
附图说明
26.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
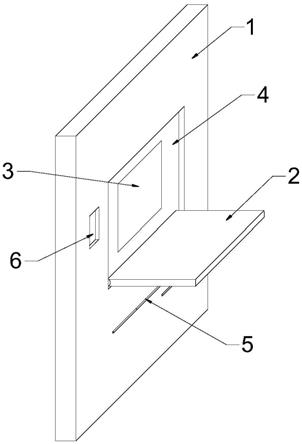
27.图1是本实用新型其中一实施例提供的一种清洁机器人的结构示意图,其中,清洁机器人的部分结构被省略;
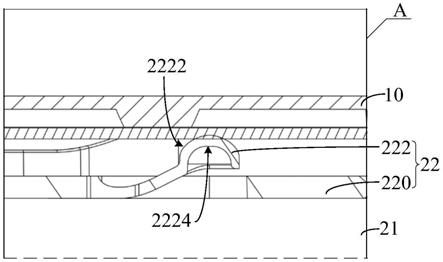
28.图2是图1所示的a处的局部放大示意图;
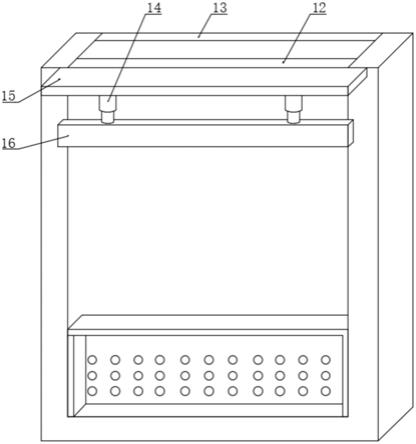
29.图3是图1所示的清洁机器人的拖布支架的结构示意图;
30.图4是图3所示的b处的局部放大示意图;
31.图5是图1所示的清洁机器人的拖布支架与底盘的相连接处的结构示意图;
32.图6至图8是本实用新型另一实施例提供的一种清洁机器人的场景示意图。
33.附图标记如下表所示:
34.100清洁机器人222支撑部10底盘2220岔部20拖布组件2222凸面21拖布2224凹面22拖布支架224导柱体220支架主体2240限位部2200凹槽2242支部o圆弧线
ꢀꢀ
具体实施方式
35.为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。需要说明的是,当元件被表述“连接”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“左”、“右”、“上端”、“下端”、“顶部”以及“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、等仅用于描述目的,而不能理解为指示或暗示相对重要性。
36.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。在本实用新型的说明书中所使用的术语只是为了
描述具体的实施例的目的,不是用于限制本实用新型。
37.请参阅图1,本实用新型其中一实施例提供的一种清洁机器人100,包括底盘10和拖布组件20。所述拖布组件20安装于所述底盘10。
38.所述拖布组件20,包括拖布21和拖布支架22。所述拖布支架22用于安装于清洁机器人100的底盘10,所述拖布21连接于所述拖布支架22,所述拖布21用于擦拭地面。
39.请参阅图2,所述拖布支架22用于连接于所述清洁机器人100的底盘10与拖布21之间。
40.所述拖布支架22包括支架主体220和支撑部222。
41.所述支架主体220可朝靠近或者远离所述底盘10的方向移动。
42.所述支撑部222与所述支架主体220一体设置,所述支撑部222突出于所述支架主体220靠近所述底盘10的一侧,用于抵接所述底盘10,并提供所述支架主体220远离所述底盘10的抵触力。
43.所述支撑部222被配置为可在外部压力作用下形变,并在外部压力撤销后复原,以使得所述支撑部222能够提供驱使所述支架主体220远离所述底盘10的抵触力。
44.所述支撑部222包括连接端和抵接端。所述支撑部222的连接端与所述支架主体10一体成型,所述支撑部222的抵接端突出于所述支架主体220的一侧,用于抵接所述底盘10。
45.所述抵接端被配置为可在外部压力的作用下相对所述连接端活动,其中,在外部压力的作用下相对所述连接端活动至靠近所述支架主体220的位置,所述支撑部形变,在外部压力撤销后,在抵触力的作用下复位至相对远离所述支架主体220的位置,所述支撑部复原。
46.所述拖布支架220用于连接所述拖布21。
47.在所述清洁机器人100日常工作的过程中,当所述拖布21擦拭平整地面时,地面向所述支撑部222施加外部压力,在外部压力的作用下,所支撑部222处于较轻微的形变状态,所述支撑部222提供将所述拖布21与地面紧密贴合的抵接力。当所述拖布21擦拭到地面的凸起处时,地面的凸起将所述拖布21及所述拖布支架220顶起,地面向所述支撑部222施加的外部压力增加,期间所述支架主体220朝靠近所述底盘10的方向移动,所述支撑部222形变加剧。当所述拖布21擦拭到地面的凹陷处时,地面向所述支撑部222施加的外部压力增加,所述支撑部222驱使所述支架主体220朝远离所述底盘10的方向移动,所述支撑部222形变减轻,但所述支撑部222仍处于形变状态,提供将所述拖布21与地面的凹陷处紧密贴合的抵接力。
48.通过将所述支撑部222与所述支架主体220一体成型,所述支撑部222突出于所述支架主体220,以抵接所述底盘10,提供所述支架主体220远离所述底盘10的抵触力,零部件较少,以避免拖布支架22与底盘10之间的弹性结构所包括的零部件较多而导致成本较高的问题。
49.所述支撑部222基本呈杆状,相对于所述支架主体220倾斜,也即,所述支撑部222的延伸方向与所述支架主体220的夹角呈锐角,在所述支架主体220朝靠近或远离所述底盘10的方向移动时,以所述支撑部222的连接端为支点,所述支撑部222的抵接端大致绕所述支点转动,以使得所述支撑部222的抵接端活动至靠近或者远离所述的支架主体220的位置。
50.请一并参阅图3和图4,所述支架主体220基本呈半圆状。所述支撑部222的数量可以为多个,多个所述支撑部222排列在一条圆弧线o上,所述圆弧线o的圆心与所述支架主体220的圆心大致重合,用于使所述支架主体220受力均匀,能够较为平稳地相对于所述底盘10移动。
51.可以理解,根据实际需要,所述支撑部222的数量也可以仅有一个,只要能够提供驱使所述支架主体220朝远离所述底盘10的方向移动即可。
52.下面皆以多个所述支撑部222中的一个为例进行说明。
53.所述支架主体220对应所述支撑部222处设置有凹槽2200。所述支撑部222在所述支架主体220上的正投影落在所述凹槽2200所在区域内。所述支撑部222可相对于所述支架主体220活动至伸出或收缩于所述凹槽2200的位置,其中,在外部压力的作用下,所述支撑部222相对于所述支架主体220活动至收缩于所述凹槽2200的位置,在外部压力撤销后,在抵触力的作用下相对于所述支架主体220活动至伸出所述凹槽2200的位置。
54.所述支撑部222的连接端收容于所述凹槽2200内,所述支撑部222抵接端伸出所述凹槽2200。通过在所述支架主体220设置所述凹槽2200,所述凹槽2200能够为所述支撑部222提供活动空间。
55.所述支撑部222的连接端为两个岔部2220。
56.所述两个岔部2220与所述支架主体220一体成型。通过将所述支撑部222的连接端设计为两个岔部2220,能够减少所述支撑部222与所述支架主体220之间的结构,以减少所述支撑部222形变所需要的外部压力值。
57.所述支撑部222的抵接端具有凸面2222。所述凸面2222基本为球面,所述凸面2222位于所述抵接端的突出于所述支架主体220的部位,面向所述底盘10,用于抵接所述底盘10。由于在所述支架主体220朝靠近或远离所述底盘10的方向移动时,所述抵接端大致绕所述支撑部222的连接端转动,通过在所述抵接端上设置凸面2222,所述凸面2222能够减轻所述支撑部222的抵接端相对于所述底盘10转动所导致的磨损。
58.请复参阅图2,所述支撑部222的抵接端具有凹面2224。所述凹面2224位于所述抵接端的背离所述底盘10的部位上,并且与所述凸面2222相对设置。在注塑成型所述支撑部222时,所述凹面2224用于供模具置入。
59.所述凸面2222与所述凹面2224之间的最大间距不超过预设距离阈值,以避免厚度太大不满足注塑要求。所述凸面2222与所述凹面2224之间的最大间距与所述连接端的厚度大致相同。
60.请一并参阅图3,图4以及图5,所述拖布支架22还包括导柱体224。所述导柱体224的一端连接所述支架主体220,所述导柱体224的另一端用于套设于所述底盘10内,用于引导所述支架主体220靠近或者远离所述底盘10。
61.所述导柱体224可与所述支架主体220一体成型,也可以通过组装的方式固定在所述支架主体220上。
62.所述导柱体224的用于套设于所述底盘10内的另一端设有限位部2240,所述限位部2240位于所述底盘10背向所述支架主体220的一侧,用于在所述支架主体220远离所述底盘10至预设位置时抵接所述底盘10,以阻止所述支架主体220继续远离所述底盘10,进而避免所述拖布支架22脱离所述底盘10。
63.所述导柱体224包括两个支部2242,所述两个支部2242形成所述导柱体224的用于套设于所述底盘10的另一端,所述限位部2240设于所述两个支部2242中的至少一个。
64.在沿所述导柱体224的径向上,所述两个支部2242相间隔,所述两个支部2242具有弹性,在将所述导柱体224套设于所述底盘10内的过程中,所述两个支部2242可沿所述导柱体224的径向靠拢,以使得所述两个支部2242及所述限位部2240能够穿过所述底盘10,以抵达所述底盘10的背向所述支架主体220的一侧,在所述两个支部2242及所述限位部2240穿过所述底盘10后,所述两个支部2242朝远离彼此的方向弹性复原。
65.所述拖布支架22整体可由具有一定弹性和刚性的塑料材质。
66.可以理解,所述支撑部222并不仅限于与所述支架主体220一体成型,根据实际需要,所述支撑部222可以与所述底盘10一体成型,在其他一些实施例中,所述底盘10设置有支撑部222,所述支撑部222的与所述底盘10一体成型,并突出于所述底盘10,用于抵接于所述拖布支架22,以提供所述拖布支架22远离所述底盘10的抵触力。
67.请一并参阅图6、图7以及图8,本实用新型另一实施例提供一种清洁机器人100a,所述清洁机器人100a与前述实施例提供的清洁机器人100基本相同,区别主要在于,所述支撑部222a为刚性结构,即所述支撑部222a的连接端和抵接端相对固定设置。
68.所述拖布支架22a包括支架主体220a,支撑部222a以及导柱体224a。所述支撑部222a突出于所述支架主体220a靠近所述底盘10a的一侧,用于抵接所述底盘10a,提供所述支架主体220a远离所述底盘10a的抵触力。
69.所述支撑部222a设置于所述拖布支架22a的中间位置,所述支架主体22a可绕所述支撑部222a相对于所述底盘10a摆动,以使得所述支架主体22a的一端靠近所述底盘10a,另一端远离所述底盘10a。在所述支架主体220a摆动至一个极限位置时,所述支架主体220a的一端抵靠于所述底盘10a。
70.防脱组件224a连接所述支架主体220a和所述底盘10a,以避免所述拖布支架22a脱离所述底盘10a。防脱组件224a可以包括卡扣、挂钩、夹持结构或插接结构等其中任意一种或多种。
71.在所述清洁机器人100a日常工作的过程中,当拖布擦拭平整地面时,所述支架主体22a基本平行于地面。当拖布擦拭凹凸地面时,所述支架主体22a的一端作用于地面的凸起处或者凹陷处,以使得所述支架主体220a的另一端绕所述支撑部转动,所述底盘抵接于所述支架主体220a的一端,并抵接于所述支撑部222a,以使得所述支架主体220a与地面保持贴合,其中,所述底盘与地面可以抵接于所述支架主体220a的同一端,也可以抵接于所述支架主体220a的不同端。在脱离凹凸地面后,在重力的作用下,所述支架主体220a复位。
72.与现有技术相比,在本实用新型实施例提供的拖布组件及具有此拖布组件的清洁机器人中,通过将支撑部与支架主体一体成型,并抵接于底盘,可使得本实施例的拖布组件与底盘之间的零部件较少,从而降低制造成本。
73.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参阅前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,
或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。