1.本实用新型涉及农业机械领域,即一种辣椒捡拾采摘一体机。
背景技术:
2.辣椒是人们喜爱的食物之一,辣椒产业被国家设为扶贫产业之一,我国是辣椒生产和消费大国,辣椒种植分布极广,据统计数据,辣椒每年有2000万亩的种植面积,近700亿元的产值。辣椒种植品类以线椒、尖椒为主,兼有泡椒、朝天椒、圆椒等诸多类型。随着产业日趋成熟,辣椒消费逐渐形成了稳定市场。辣椒的收获工艺有多种,一种是人工采摘,这是最原始的采摘方法,工作量大,劳动强度高,成本高、效率低,辣椒对人的眼睛、皮肤和手都有伤害,由于辣椒种植面积不断扩大,这种方法已经不适应规模生产的需要;第二种方法是机械采摘,采用象梳子一样的机械直接从辣椒苗上将辣椒梳理一下,达到了椒杆分离的目的,由于辣椒的水份大,这种机械采摘对辣椒的损害比较大,辣椒破损率比较高;用得比较多的是第三种采摘方法:先将辣椒用人工或用割晒机对辣椒进行收割,有序堆放成行,经日晒一到二周后,辣椒的水份蒸发,脆性降低,韧性增加,辣椒杆儿的水分蒸发后,脆性增加,韧性下降,尤其是辣椒杆儿与辣椒连接的辣椒把,失水后变得更脆,辣椒很容易从辣椒杆上脱落,本实用新型就是利用了这一特性,利用机械进行捡拾、升运至链条夹持装置再用刺辊将辣椒刮梳下来,这种工艺对辣椒的损伤较小,辣椒杆儿随着夹持持链条被排出,减少了筛分的工作量,这种方式即解决了人们的繁重劳动,提高了辣椒收获的效率。
技术实现要素:
3.本实用新型的目的是采用上述第三种采摘方法,提高作业效率,降低成本,设计一种集捡拾、刮梳、筛分于一体的辣椒捡拾采摘一体机。
4.上述目的是由以下技术方案实现的:
5.一种辣椒捡拾采摘一体机,其特征在于:包括机架、行走轮、捡拾装置、夹持装置、拔椒轮、筛分装置、传动系统;
6.机架用于支撑、装配、固定辣椒捡拾采摘一体机的构成部件;
7.行走轮用于支撑辣椒捡拾采摘一体机行走移动;
8.捡拾装置用于从地面捡拾物料并将其提升和/或输送至夹持装置;
9.夹持装置用于夹持固定由捡拾装置传输过来的物料;
10.拔椒轮用于物料的拆分、脱离,当物料为辣椒时,拔椒轮用于辣椒果实与椒杆之间的拆分、脱离;
11.筛分装置用于筛分、分离两种或两种以上的物料,当物料为辣椒时,筛分装置用于分离辣椒果实与椒杆;
12.传动系统用于驱动、传动、匹配辣椒捡拾采摘一体机的构成部件,该构成部件包括但不限于行走轮、捡拾装置、夹持装置、拔椒轮、筛分装置中的任一种或多种。
13.所述辣椒捡拾采摘一体机包括升降油缸,所述的机架是采用两点牵引式,行走轮
采用万向轮形式,在机架的右侧倾斜安装有辣椒捡拾装置,机架上部捡拾装置的后端与捡拾装置右侧边对应设有链条夹持装置,夹持装置的左侧设有与前进方向平行的三个拔椒轮。
14.所述捡拾装置包括升运链、两节式压椒杆、输送滑板和仿形轮,升运链跨接在两根平行轴上,一根轴为主动轴在上,一根轴为从动轴在下,从动轴上设有捡拾轮并通过升运链驱动。
15.所述捡拾装置的输送滑板右侧边上设有对齐板,对齐板下端向右张开;所述两节式压椒杆由一支长压椒杆和一支短压椒杆组成,长压椒杆上端铰接在机架上,下端为弧形并向上翅起,短压椒杆的一端与长压椒杆中部铰接,另一端在上为弧形并向上翅起。
16.所述的夹持装置是由上下两条同向同步夹持链组成,上下夹持链各自形成封闭的四边形,上下夹持链相邻两边上下接触,形成夹持辣椒杆部的链夹,在下夹持链的下面设有多个托链轮,在上夹持链下边相对托链轮交错设置多个弹性压链轮,上下夹持链的各个顶点设有链轮支撑,其中对角线的两个链轮设有涨紧弹簧。
17.所述的拔椒轮有三个,相对夹持辣椒杆部链条上下设置两个拔椒轮,即上拔椒轮甲和下拔椒轮乙,其转向相反,与下拔椒轮乙平行的左侧设置拔椒轮丙,在拔椒轮乙和拔椒轮丙的下方设有拔椒轮丁,拔椒轮丁下方是条形筛。
18.所述的拔椒轮表面圆周方向相隔90度,轴向以螺旋线排列着三角形齿环,相邻两角形齿轴向距离为105
‑
150毫米;
19.所述的筛分装置设置在机架的左侧,筛分装置为多个距离相同的同心圆组成或由螺距相同的螺旋管组成,筛分装置的两侧设有圆形滚道,座落在四个滚轮上,前端两个滚轮同轴。文中所述的上下左右方位是以人站在辣椒捡拾采摘一体机的后方而言的。
20.所述的传动系统的动力从拖拉机动力输出轴输出,经万向传动轴传给小皮带轮,经三角传动带传给大皮带轮,在此处动力分为两路,一路经转向锥齿轮甲、锥齿轮乙传给滚轮,滚轮有4个,支撑筛分装置两侧的滚道;另一路经主动链轮、传动链、带动拔椒轮转动,传动链同时带动分动锥齿轮甲并将动力传给分动锥齿轮乙带动捡拾主动链轮转动,通过升运链带动捡拾从动链轮及同轴固连的捡拾轮;与分动锥齿轮乙同轴固连的下夹持链主动链轮使下夹持链运动,同轴固连的同步锥齿轮甲将动力经同步锥齿轮乙、同步锥齿轮丙、同步锥齿轮丁、上夹持链主动链轮分别传给上夹持链;另外经拔椒轮丙的右拔椒后链轮、惰轮带动上拔椒后链轮转动;所述的上下夹持链的线速度是相等的,三个拔椒轮的转速相等。
21.其有益效果是:避免了辣椒对人体的伤害,提高了辣椒收获效率,降低了成本和操作者的劳动强度。
附图说明
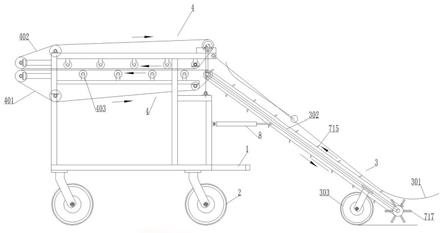
22.图1 是第一实施例整体结构主视图;
23.图2 是第一实施例整体结构左视图;
24.图3 是拔椒轮放大主视图;
25.图4 是拔椒轮放大左视图;
26.图5 是整机传动示意图。
27.由图可见:机架1,行走轮2,捡拾装置3、压椒杆301 、输送滑板302、仿形轮303,夹
持装置4、下夹持链401、上夹持链402、托链轮403、弹性压链轮404、涨紧弹簧405,拔椒轮5、上拔椒轮甲501、下拔椒轮乙502、拔椒轮丙503、拔椒轮丁504、条形筛505,筛分装置6、滚道601,传动系统7、动力输出轴701、万向传动轴702、小皮带轮703、三角传动带704、大皮带轮705、转向锥齿轮甲706、锥齿轮乙707、滚轮708、主动链轮709、传动链710、分动锥齿轮甲712、分动锥齿轮乙713、捡拾主动链轮714、升运链715、捡拾从动链轮716、捡拾轮717、下夹持链主动链轮718、同步锥齿轮甲719、同步锥齿轮乙720、同步锥齿轮丙721、同步锥齿轮丁722、上夹持链主动链轮723、右拔椒后链轮724、惰轮725、上拔椒后链轮726,升降油缸(8)。
具体实施方式
28.本实用新型总的构思是:为满足辣椒捡拾、椒杆分离,分选的工艺要求,设计一种辣椒捡拾采摘一体机,下面结合附图介绍几种实施例。
29.第一实施例,如图1、2所示,是一种辣椒捡拾采摘一体机,包括机架1、行走轮2、捡拾装置3、夹持装置4、拔椒轮5、筛分装置6、传动系统7和升降油缸8,其特点是机架1是采用两点牵引式,与牵引动力成为一个整体,提高驾驶员的操向性;行走轮2采用万向轮形式,便于拐弯和仿形;在机架1的右侧倾斜安装有辣椒捡拾装置3,机架1上部捡拾装置3的后端与捡拾装置3右侧边对应设有链条夹持装置4,夹持装置4的左侧设有与前进方向平行的三个拔椒轮5。
30.第二实施例,如图1所示,在第一实施例的基础上,所述捡拾装置3包括升运链715、两节式压椒杆301、输送滑板302和仿形轮303,升运链715是在普通链上每隔一定距离有一凸起或每个链节都有凸起或是一种单侧直板链。凸起或直板对辣椒苗有向上扶托的作用,迫使辣椒苗在升运链715的扶托下沿输送滑板302向上移动,升运链715跨接在两根平行轴上,一根轴为主动轴在上,一根轴为从动轴在下,从动轴上设有捡拾轮717并通过升运链715驱动,捡拾轮717将地上的辣椒苗捡拾起来,在两节式压椒杆301压力作用下紧紧地贴在输送滑板302,由于两根链平行等速运动,辣椒苗被平行运到夹持装置4的入口处。
31.所述捡拾装置3的输送滑板302右侧边上设有对齐板,对齐板下端向右张开,便于辣椒进入,进入后又对辣椒进行向左挤压,使辣椒根部对齐,便于夹持装置4的夹持;捡拾装置3在长距离运输中,利用升降油缸8将捡拾装置3升起。
32.所述两节式压椒杆301由一支长压椒杆和一支短压椒杆组成,长压椒杆上端铰接在机架上,下端为弧形并向上翅起,压在辣椒苗上,翅起部分便于整株辣椒进入,短压椒杆的一端与长压椒杆中部铰接,上端为弧形并向上翅起,以自身重量压在输送到输送滑板302上部的辣椒上,有利于辣椒进入夹持装置4中。
33.第三实施例,如图1、2、5所示,在第一实施例的基础上,所述的夹持装置4是由上下两条同向同步夹持链组成,上下夹持链各自形成封闭的四边形,上下夹持链相邻两边上下接触,形成夹持辣椒杆部的链夹,在下夹持链401的下面设有多个托链轮403,在上夹持链402下边相对托链轮403交错设置多个弹性压链轮404,上下夹持链的各个顶点设有链轮支撑,其中对角线的两个链轮设有涨紧弹簧405。
34.第四实施例,如图1、2、3、4所示,所述的拔椒轮5有三个,相对被夹持的辣椒杆部链条上下设置两个拔椒轮,即上拔椒轮甲501和下拔椒轮乙502,其转向相反,与下拔椒轮乙平行设置拔椒轮丙503,在拔椒轮乙502和拔椒轮丙503的下方设有拔椒轮丁504,拔椒轮丁504
的作用是将下部的辣椒抛射到筛分装置6中,拔椒轮丁504下方是条形筛505,漏掉细小的辣椒杆。
35.所述的拔椒轮5表面圆周方向相隔90度、在轴向以螺旋线排列着三角形齿环,相邻两三角形齿环轴向距离为105
‑
150毫米;
36.第五实施例,如图1、2所示,在第一实施例的基础上,所述的筛分装置6设置在机架1的左侧,筛分装置6为多个距离相同的同心圆组成或由螺距相同的螺旋管组成,筛分装置6的两侧设有圆形滚道601,座落在四个滚轮708上,前端两个滚轮同轴。
37.第六实施例,如图5所示所述的传动系统7的动力从拖拉机动力输出轴701输出,经万向传动轴702传给小皮带轮703,经三角传动带704传给大皮带轮705,在此处动力分为两路,一路经转向锥齿轮甲706、锥齿轮乙707传给滚轮708,滚轮708有4个,前两滚轮同轴,4个滚轮708支撑筛分装置6两侧的滚道601;另一路经主动链轮709、传动链710、带动拔椒轮5转动,传动链710同时带动分动锥齿轮甲712并将动力传给分动锥齿轮乙713带动捡拾主动链轮714转动,通过升运链715带动捡拾从动链轮716及同轴固连的捡拾轮717;与分动锥齿轮乙713同轴固连的下夹持链主动链轮718使下夹持链401运动,同轴固连的同步锥齿轮甲719将动力经同步锥齿轮乙720、同步锥齿轮丙721、同步锥齿轮丁722、上夹持链主动链轮723分别传给上夹持链402;另外经拔椒轮丙503的右拔椒后链轮724、惰轮725带动上拔椒后链轮726转动;所述的上下夹持链的线速度是相等的,三个拔椒轮的转速相等。
38.以上仅是本实用新型的优选实施方式,应当指出的是,上述优选实施方式不应视为对本实用新型的限制,本实用新型的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本实用新型的精神和范围内,还可以做出若干改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。