1.本发明属于气体绝缘组合电器设备故障技术领域;尤其涉及一种气体绝缘组合电器设备故障定位方法。
背景技术:
2.气体绝缘组合电器设备(gis)由于占地面积少、受外界环境影响小、运行安全可靠和维护简单等优点,近几十年来在国内外得到越来越广泛的运用。但在gis的制造和装配过程中,往往由于工艺等问题会使gis内部留下一些小的缺陷,如金属微粒、绝缘气隙等,这些微小的缺陷在gis运行过程中可能会发展为危险的放电通道,并最终引起绝缘击穿事故。因此,为预防gis设备的绝缘故障,保障电力系统的安全运行,对运行中的gis进行局部放电监测就显得日益重要。在gis局部放电监测中,发现设备存在局部放电后快速准确地对局部放电定位,以制定高效可行的设备检修维护方案,这对于迅速排除故障隐患,保障系统安全运行具有重要的意义。因此,局部放电定位技术在gis现场安全维护中得到广泛的关注。
3.然而,现有技术广泛使用的三种局部放电定位方法均存在缺陷;超高频定位法(uhf)存在抗干扰能力弱,难以实现故障的准确定位;、超声波定位法存在其有效范围较小,现场应用时工作较为繁重;声电联合定位法所用传感器数量多,现场应用工作较为复杂,难以及时定位gis设备内部局放源位置。
技术实现要素:
4.本发明要解决的技术问题:提供一种气体绝缘组合电器设备故障定位方法,以解决现有技术对气体绝缘组合电器设备(gis)故障定位存在的工作较为复杂,定位精度不高等技术问题。
5.本发明技术方案:
6.一种气体绝缘组合电器设备故障定位方法,它包括:
7.步骤1、对gis设备进行故障分区,分为10个故障区域;
8.步骤2、将不同故障区域的气体数据按滑动时间窗口进行处理,时间步长20s;
9.步骤3、将滑动处理好的不同故障区域气体数据按80%和20%的比例划分为训练集和测试集;
10.步骤4、确定神经网络初始参数;
11.步骤5、搭建cnn
‑
lstm神经网络模型;
12.步骤6、将训练集数据预处理后送入cnn
‑
lstm神经网络模型中训练,通过激活函数激活神经网络内部参数;
13.步骤7、通过误差反向传播计算神经网络内部参数的梯度值;
14.步骤8、通过优化算法更新神经网络参数,反复迭代直到损失函数降到设定值,结束神经网络模型训练;
15.步骤9、按照均方误差和分类准确率指标,通过训练集数量的改变和测试集的测试
确定cnn
‑
lstm模型的精度;
16.步骤10、通过采集各个故障区域内的气体数据输入训练好的神经网络模型进行故障定位。
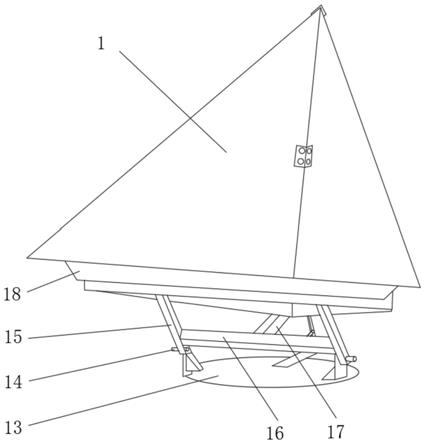
17.步骤1所述10个故障区域的划分方法为:采用spacecliam方法将gis设备划分为10个故障区域;划分方法为:依据距离设备取气口的远近来划分,区域1距离取气口最近,区域10距离取气口最远。
18.步骤4所述确定神经网络初始参数为:卷积核的类型为1d,大小为20,池化层的池化方式为最大池化,神经元个数为100。
19.步骤5所述搭建cnn
‑
lstm神经网络模型的方法为:采用cnn模型提取数据的隐含特征,lstm模型解释cnn提取出的隐含特征的方式构建cnn
‑
lstm混合神经网络预测模型;cnn
‑
lstm混合神经网络预测模型的输入是经过滑动时间窗口处理的故障特征组份气体数据,cnn
‑
lstm混合神经网络预测模型的前半部分是cnn网络层,用于对故障特征组份气体数据的空间特征提取,卷积层用来提取特征,在cnn
‑
lstm混合神经网络预测模型的卷积层之后添加池化层,池化层用来降维减小卷积核的尺寸,同时保留相应特征;cnn
‑
lstm混合神经网络预测模型的后半部分lstm模型,用于提取故障特征组份气体数据的时间特征;首先对cnn处理的数据进行维度的变化,输入到lstm层,最后cnn
‑
lstm的输出通过全连接层来产生最终的输出。
20.将训练集数据预处理的方法为:采用最大最小法对数据进行归一化处理,公式为:
21.x
k
=(x
k
‑
x
min
)/(x
max
‑
x
min
)
22.式中:x
min
为数据序列中的最小值;x
max
为数据序列中的最大值。
23.激活函数为relu函数。
24.优化算法采用nadam。
25.迭代次数的确定方法为:令学习率随网络迭代次数发生变化;变化规律为:每迭代10次,网络的学习率减小为原来的0.94;建立迭代次数与网络准确率之间的关系曲线;通过迭代次数与网络准确率之间的关系曲线确定迭代次数为900次。
26.本发明的有益效果:
27.本发明为了实现对gis设备的故障精确定位,首先将gis设备划分为不同的故障区域;其次,将分区所得故障特征组分气体数据划分为训练集与测试集,构建并优化cnn
‑
lstm算法模型;接着将训练集输入到模型内进行训练,并更新模型参数以及优化模型以达到最佳效果;最后,将测试集输入到训练好的cnn
‑
lstm模型内,测试模型并计算最终的准确率;结果表明:cnn
‑
lstm神经网络对gis设备故障分区的效果最好;本发明验证了所提cnn
‑
lstm模型的准确性,cnn
‑
lstm模型能够准确的对gis设备进行分区,且准确率高达98.6%,分区后能达到缩小故障范围,实现故障精确定位的目的。
28.解决了现有技术对气体绝缘组合电器设备(gis)故障定位存在的工作较为复杂,定位精度不高等技术问题。
附图说明
29.图1为本发明具体实施方式gis设备分区示意图;
30.图2为本发明具体实施方式典型一维卷积神经网络结构示意图;
31.图3为本发明具体实施方式典型1d
‑
cnn
‑
lstm网络架构示意图;
32.图4为relu函数图像示意图;
33.图5为cnn
‑
lstm神经网络分类准确率与激活函数关系示意图;
34.图6为cnn
‑
lstm神经网络优化方法与分类准确率关系图;
35.图7为定学习率时迭代次数与网络准确率之间的关系示意图;
36.图8为变学习率时迭代次数与网络准确率之间的关系示意图;
37.图9为改变训练集数量对网络分类准确率影响示意图。
具体实施方式
38.本发明分区方法及原则:
39.gis设备分区采用仿真算例的方式,最终实现了对gis设备的故障分区。
40.本发明将gis设备分为10个故障区域,划分区域的方法和原则是:1、采用spacecliam方法将gis设备划分为10个故障区域;2、划分原则是依据距离取气口的远近来划分,区域1局离取气口最近,区域10距离取气口最远;3、故障区域选择过小,会导致故障定位不准确,故障区域选择过大,会导致准确率降低,故本发明中故障区域数选择为10个。依据不同区域发生故障时,特征组分气体扩散到取气口处特征量不同,通过气体扩散效应仿真分析得到不同特征组分气体在不同故障区域扩散到取气口的特征量,结合cnn
‑
lstm算法,通过分区先缩小故障范围实现故障的精确定位。
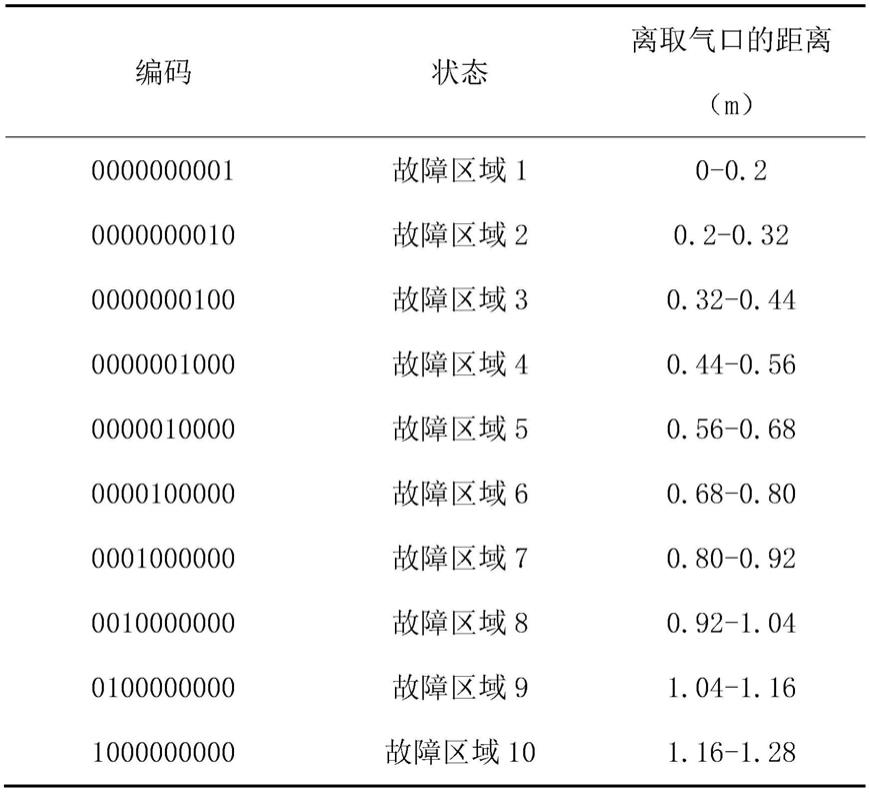
41.本发明仿真分析时统一使用的电脑设备操作系统为windows 10(64位),cpu为intel i7,内存为8gb,基于python 3.7搭建仿真平台。由于划分故障区域为10个,因此输出层神经元个数为10,采用0或1编码的形式表示神经元状态,预测的故障区域与编码之间的对应关系如表1:
42.表1输出结果编码与预测故障区域之间的关系
[0043][0044]
故障分区后,处理流程如下所述:
[0045]
第一步:将不同故障区域气体数据按滑动时间窗口处理,时间步长20s;
[0046]
从神经网络的学习特性来说,神经网络需要有大量的样本来学习原始数据特征并固定其权重,若原始数据采集频率为1s,采集总时长度为1000s,则记录有1000组数据,当样本划分时间长度为20s,并以1
‑
20,21
‑
40
…
,981
‑
1000,则仅有50组样本,这会使得神经网络不能充分学习原始数据特征,本发明以时间步长20s,时间间隔长度为1s,并采用本发明滚动滑窗方式构建样本,则有980组样本,就能够增多样本数量并能使神经网络充分学习到原始数据的特征。当分别对故障区域1到10均采用该种方式构造样本时,则可使得神经网络对不同区域不同时刻的数据进行充分有效的学习;提高故障定位精度。
[0047]
第二步:将滑动处理好的不同故障区域气体数据按80%和20%的比例划分为训练集和测试集;
[0048]
第三步:确定神经网络初始参数:卷积核的类型为1d,大小为20,池化层的池化方式为最大池化,神经元个数为100等;
[0049]
卷积神经网络(convolutional neural networks,cnn)。卷积神经网络是多层感知机的一个特殊模型,是深度学习的代表算法之一。卷积神经网络包括一维卷积神经网络(one dimension cnn,1d
‑
cnn)、二维卷积神经网络(two dimension cnn,2d
‑
cnn)以及三维卷积神经网络(three dimension cnn,3d
‑
cnn)。
[0050]
1d
‑
cnn通过采用局部连接和并行处理的方式,可快速对原始数据实现更高层次和更抽象的处理,可有效的自动提取出数据中的内部特征。1d
‑
cnn的内部神经网络层主要包括卷积层、激活函数层、池化层和全连接层。一个典型的1维卷积神经网络结构卷积层中多个卷积核部分连接、权重共享的数据处理方式减少了的参数数量,并可提取多通道原始数据的有效信息;激活函数层使得每个卷积核具备较强的非线性映射能力;池化层通过取局部均值或最大值的操作,对原始卷积核提取的数据进行了有效的降维,降低了模型的复杂度。
[0051]
除了上述层次结构,卷积神经网络中一般还有全局池化层。
[0052]
当cnn中最后一层为全连接层,对应为拉平操作和神经网络全连接,因此会导致cnn网络中参数数量过多,若采用全局均值池化操作(global average pooling,gap)或全局最大池化操作(global max pooling,gmp)操作来取代全连接层,可以有效的减少参数并具有防止过拟合的效果。过程如下所示:
[0053][0054]
(2)长短期记忆网络神经网络(long short term memory,lstm)。lstm网络里面主要分为两种“记忆”,即长期记忆c(t)和短期记忆h(t)。一般而言,长期记忆的更新较慢,以捕获数据的长期变化关系与总体趋势,以克服梯度消失或梯度爆炸的问题,短期记忆的更新较快,以捕获时间序列的瞬时变化。“细胞”结构内部激活函数为sigmoid和tanh,将变量映射到0和1,sigmoid用来控制门结构的开启和关闭,当数据通过激活函数映射结果为0时,门结构关闭,当通过激活函数映射为1时,门结构打开,tanh则用来决定当前时刻记忆细胞。遗忘门决定是否保留前一时刻数据,输入门决定是否保留当前数据,输出门决定下一时刻输出数据。
[0055]
由lstm基本网络结构可知,lstm每一时刻的输出都由前一时刻的隐藏状态和此刻的输入共同决定,这使得lstm可挖掘相对较长的时序序列内部关系,其中遗忘门和输入门的输入为t时刻的时序信息x
t
和前一时刻的隐藏状态h
t
‑1,它们分别与状态单元连接并将上一时刻的单元状态c
t
‑1更新为c
t
;输出门的输入为更新后的单元状态c
t
、x
t
和h
t
‑1,通过sigmoid和tanh函数变化后更新隐藏状态h
t
‑1为h
t
。计算公式如下所示:
[0056][0057]
式中,f
t
、i
t
、c、c
t
、o
t
和h
t
分别为遗忘门、输入门、输入节点、状态单元状态、输出门和隐藏状态;w
f
、w
i
、w
c
、w
o
和b
f
、b
i
、b
c
、b
o
分别为遗忘门、输入门、输入节点和输出门对应的权值向量和偏置量;
⊙
表示向量元素按位相乘。
[0058]
第四步:搭建cnn
‑
lstm神经网络模型;
[0059]
cnn
‑
lstm混合神经网络模型。在对gis设备进行故障分区的过程中,仅使用cnn或lstm神经网络模型往往不能充分的学习到故障特征组分气体数据的隐含特征。因此,常采用cnn模型提取数据的隐含特征,lstm模型解释cnn提取出的隐含特征的方式构建cnn
‑
lstm混合神经网络预测模型。
[0060]
组合模型的输入是经过滑动时间窗口处理的故障特征组份气体数据,组合模型的前半部分是cnn网络层,用于对故障特征组份气体数据的空间特征提取,卷积层用来提取特征,卷积层因其具有参数共享的特性可以降低神经网络参数的稀疏性,同时防止过拟合问题,提升模型计算效率,在组合模型的卷积层之后添加了池化层,池化层用来降维,可以减小卷积核的尺寸,同时又可以保留相应特征。组合预测模型的后半部分lstm模型,用于提取故障特征组份气体数据的时间特征。首先对cnn处理的数据进行维度的变化,输入到lstm层,最后,cnn
‑
lstm的输出通过全连接层来产生最终的输出。
[0061]
cnn
‑
lstm模型的搭建方式可以较好的利用两个模型各自的优点,即cnn的特征提取能力和lstm的对cnn提取特征的翻译能力,目前有多位国内学者通过搭建仿真模型并对此模型进行了验证,cnn
‑
lstm混合神经网络模型相较于lstm模型,可以有效的提高模型的精度。
[0062]
第五步:将数据预处理后送入cnn
‑
lstm混合神经网络模型进行训练,激活神经网络内部参数;
[0063]
(1)样本的选择及预处理
[0064]
本发明选取的所有数据均是基于fluent仿真软件中4种特征组分气体扩散效应的结果。10个故障区域共有故障特征组分气体数据10000组,每个故障区域的故障特征组分气体数据为1000组,每组数据样本为1
×
4维,分别为so2、h2s、hf和co浓度大小。数据输入网络之前,对所有数据进行归一化处理,所有数据都换算到[0,1]或者[
‑
1,1]之间,目的是为了防止样本的数量级差距过大,而引起的网络分类误差过大的问题。本发明采用最大最小法对数据进行归一化处理,在python平台下命令为min
‑
max normalization,公式如下:
[0065]
x
k
=(x
k
‑
x
min
)/(x
max
‑
x
min
)
[0066]
其中,x
min
为数据序列中的最小值;x
max
为数据序列中的最大值。
[0067]
(2)激活函数的选择
[0068]
激活函数是控制网络最终输出的重要函数。误差在反向传播过程中,求解误差梯度的重要参数就是激活函数的导数。以下3种为常用的激活函数,它包括sigmoid函数、tanh函数和relu函数。函数图像和数学表达式如下:
[0069]
①
sigmoid函数
[0070]
数学表达式为:
[0071][0072]
值域为(0,1)。
[0073]
②
tanh函数
[0074]
数学表达式为:
[0075]
f(x)=(e
x
‑
e
‑
x
)/(e
x
e
‑
x
)(3
‑
5)
[0076]
值域为(
‑
1,1)。
[0077]
③
relu函数
[0078]
数学表达式为:
[0079][0080]
本发明中激活函数为relu函数时与分类准确率的关系曲线可以得知:
[0081]
激活函数为relu函数时,模型的分类误差最小,所以,本说明选用relu函数作为cnn
‑
lstm混合神经网络的最终激活函数。
[0082]
第六步:误差反向传播计算神经网络内部参数的梯度值;
[0083]
第七步:选择合适的优化算法更新神经网络参数,反复迭代,直到损失函数降到设定值,结束网络训练;
[0084]
(1)优化方法的选择
[0085]
keras优化器类别共分为7大类,sgd、adagrad、adadelta、rmsprop、adam、adamax和nadam。
[0086]
sdg,全称为随机梯度下降,即每次计算时采用一小批样本,这样一方面保证梯度下降时更新参数方差低的特点,同时随机梯度下降参数更新的效率也得到了保障。但随机梯度下降的收敛性不能得到好的保障,当选择的学习范围参数过大时,则其将在最小值处波动,当选择的学习范围参数过小时,则其寻优速度较缓,同时就非凸函数来说,此方法易导致局部最优。
[0087]
adagrad,此算法能够对低频的参数做较大的更新,对高频的参数做较小的更新,因此,对于稀疏数据它的表现很好,很好的提高了sgd的鲁棒性。但需要用户手工调整一个合适的学习率,adagrad算法可以动态调整学习率,从而避免了手动调整学习率的问题。
[0088]
adadelta和rmsprop相类似,都是在adagrad之上进行优化改进,解决adagrad学习率急速下降的问题。
[0089]
adam和adamax,自适应矩估计,都是自适应的学习率方法,它除了存储类似于adadelta和rmsprop算法的历史梯度平方的衰减平均v
t
外,还存储了历史梯度的衰减平均m
t
。
[0090]
nadam,可以看作是rmsprop和动量的组合,rmsprop贡献了过去平方梯度v
t
的指数衰减平均值,而动量解释了过去梯度m
t
的指数衰减平均值。
[0091]
本发明中分类准确率与优化算法的关系曲线可知,nadam算法的准确率最高,所以本发明中优化算法选为nadam。
[0092]
(2)迭代次数的选择
[0093]
在cnn
‑
lstm混合神经网络对故障特征气体数据进行训练前,首先应初始化网络参数,初始化权值位于
‑
1到1之间的任意数,目的是为了让网络更快的收敛。而在网络的训练过程中,准确率会随着网络迭代次数的增加而上升,但并不能无限制的增长,当迭代次数到达一定的数量后,整个网络会达到最优,准确率基本维持稳定,而伴随着迭代次数的增加,整个网络运算时间变长。因此,需要一个最适合网络训练的迭代次数。本发明绘制出了不同迭代次数与网络准确率之间的关系曲线,由关系曲线可知,在整体上,网络的准确率随着迭代次数的增加而上升,但可以看出,网络的准确率波动太大,为了解决准确率随网络迭代次
数波动过大的问题,本发明引入变学习率。标准的cnn
‑
lstm神经网络在学习过程中,学习率始终为常数,保持不变。若网络学习率选取过小,则每次调整权值的量就小,网络收敛较慢;若学习率选取过大,则每次调整权值的量就大。较大的权值调整量可能导致网络在最优解附近来回跳动,产生震荡,网络不能收敛。
[0094]
本发明采用变学习率的方法,令学习率随网络迭代次数发生变化。其变化规律为:每迭代10次,网络的学习率减小为原来的0.94。引入变学习率后迭代次数与网络准确率之间的关系曲线;由变学习率后迭代次数与网络准确率之间的关系曲线可知,在加入变学习率后,cnn
‑
lstm神经网络的准确率随迭代次数的增加逐渐上升并最终维持稳定。当迭代次数在800次以后,整个网络的准确率基本维持稳定。即900次时网络已经达到最优,所以本发明中网络的迭代次数最终选定为900次。
[0095]
第八步:最后,按照均方误差,分类准确率等指标,通过训练集数量的改变和测试集的测试判断cnn
‑
lstm模型的精度。
[0096]
(1)训练集数量改变
[0097]
在网络的训练过程中,训练集的数量也严重影响网络的训练效果:如果训练集数量过少,则网络会出现过拟合,体现在网络训练集准确率过高而测试集准确率过低,网络泛化性差。因此需要选择最合适的训练集来对网络进行训练,才能达到最佳的学习效果。因此,本发明给出了训练集分别为800、2400、4000、5600、7200、8000组数据时,网络分类准确率的变化情况,由此可知,整体上网络分类的准确率随训练集数量的增加而上升,当训练集数据为800时,网络的准确率较低,此时的学习效果较差,当训练集逐渐增加时,网络的分类准确率会逐渐增长,最终会维持稳定。表明网络中各参数最优,网络的学习效果也达到最佳。
[0098]
(2)测试集测试
[0099]
当网络选取的训练集数量为8000组时,网络的准确率最高,准确率达到了98.6%。将训练好的cnn
‑
lstm神经网络模型,学习率采用变学习率,迭代次数选择为900次,激活函数选择为relu函数,优化方法选择为nadam,网络训练集数量为8000组,测试集数量为2000组。将其与cnn和lstm模型准确率做对比,结果如表2所示。
[0100]
表2三种不同算法准确率对比
[0101][0102]
由上表2可以看出,在10000组样本中,8000为训练集,2000为测试集的情况下,cnn
‑
lstm神经网络的准确率最高,高达98.6%。cnn的准确率最低,为92.8%。对cnn
‑
lstm神经网络的准确率与cnn和lstm神经网络的准确率作差值,cnn
‑
lstm神经网络较cnn和lstm在准确率上分别提高了5.8%和2.3%。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。