用于监视流动方向的设备、系统和方法以及用于制造流动方向传感器的方法
1.相关申请的交叉引用
2.本专利申请依照美国法典第35篇第119节要求要求2018年10月15日提交的美国临时申请第62/745,954号和2019年5月14日提交的美国临时申请第62/847.773号的优先权。以上参考申请的公开内容以引用的方式明确整体并入本文。
背景技术:
3.确定限制在导管中的流体的流动方向对于一些气体流量监视应用很重要。例如,呼吸机应用中的单个流量传感器将暴露于进出机器的气流中。遗憾地是,基于检测通过已知体积区域的气体速度的气体流量计不能检测流动方向。一些微机电系统(mems)流量传感器能够检测流动方向,但是mems流量传感器具有响应时间慢的缺点。由于这些和其他原因,需要本公开的主题。
技术实现要素:
4.与所公开的实施方案一致,公开了一种用于确定在导管中流动的流体的一个或多个流体性质的设备。所述设备包括基板,所述基板包括具有第一阻挡表面和第二阻挡表面的阻挡件。所述设备还包括第一流量传感器以生成第一速度传感器信号,所述第一流量传感器位于与第一阻挡表面相距第一传感器距离处。并且所述设备还包括第二流量传感器以生成第二速度传感器信号,所述第二流量传感器位于与第二阻挡表面相距第二传感器距离处,其中选择第一传感器距离和第二传感器距离以便以能够根据第一速度传感器信号和第二速度传感器信号确定一个或多个流体流动性质的方式干扰流体在导管中流动。在一些实施方案中,所述设备还包括第三传感器,所述第三传感器包括一对第三传感器导电引脚,所述一对第三传感器导电引脚嵌入在阻挡件和基板中。
5.与所公开的实施方案一致,公开了一种用于确定在导管中流动的流体的一个或多个流体流动性质的方法。所述方法包括在流体中提供阻挡件以引起在导管中流动的流体的上游特性和下游特性之间的差异,所述阻挡件具有第一阻挡表面和第二阻挡表面。所述方法包括将第一流量传感器定位在距第一阻挡表面第一距离处,所述第一流量传感器用以生成第一传感器信号。所述方法包括将第二流量传感器定位在距第二阻挡表面第二距离处,所述第二流量传感器用以生成第二传感器信号。并且所述方法包括处理第一传感器信号和第二传感器信号以确定在导管中流动的流体的一个或多个流体流动性质。在一些实施方案中,所述方法还包括通过从位于流体中的第三传感器生成第三传感器信号来响应流体流动方向的阶跃函数变化,所述第三传感器信号具有在约三毫秒和约五毫秒之间的第三传感器信号上升时间,并且所述第三传感器信号用以提供流体流量量值信号。在一些实施方案中,所述方法还包括从第一流量传感器信号记录连续的多个流体流量传感器读数以及跟随在所述连续的多个流体流量传感器读数之后的下一流体流量传感器读数。所述方法还包括针对所述连续的多个流体流量传感器读数根据最小二乘法拟合来生成曲线,从所述曲线生成
预测的下一数据点,将下一流体流量传感器读数与预测的下一数据点进行比较,以及生成下一流体流量传感器读数和预测的下一数据点之间的差异,并且如果所述差异大幅大于零,则使下一流体流量传感器读数无效。
6.与所附的实施方案一致,一种用于确定一个或多个流体流动性质的设备,所述一个或多个流体流动性质包括导管中的速度、量值和方向。所述设备包括阻挡件,所述阻挡件具有第一阻挡表面和第二阻挡表面。所述设备还包括第一传感器,所述第一传感器位于与第一阻挡表面相距第一传感器距离处。并且所述设备还包括第二传感器,所述第二传感器位于与第二阻挡表面相距第二传感器距离处,所述第二传感器距离基本等于所述第一传感器距离。所述设备还包括电耦合到第一传感器和第二传感器的电子系统,所述电子系统用以提供指示一个或多个流体流动性质中的至少一个的信号。
7.与所公开的实施方案一致,公开了一种用于确定导管中的流体的一个或多个流体流动性质的设备。所述设备包括基板,所述基板包括具有第一阻挡表面和第二阻挡表面的阻挡件。所述设备还包括耦合到基板的第一传感器,所述第一传感器位于与第一阻挡表面相距第一传感器距离处。所述设备还包括耦合到基板的第二传感器,所述第二传感器位于与第二阻挡表面相距第二传感器距离处,所述第二传感器距离基本等于所述第一传感器距离,并且所述第一阻挡表面基本平行于所述第二阻挡表面。所述设备还包括第三传感器,所述第三传感器包括一对第三传感器导电引脚,所述一对第三传感器导电引脚嵌入在阻挡件和基板中。术语“导电引脚”包括引线和其他导电结构。所述设备还包括惠斯通电桥,所述惠斯通电桥耦合到第一传感器以生成第一传感器流体流量信号。所述信号能够通过模拟和数字电路进一步处理。
8.与一些其他实施方案一致,公开了一种用于制造确定流体的流动方向的设备的方法。所述方法包括形成基板,所述基板包括阻挡件,所述阻挡件具有第一阻挡表面、第二阻挡表面和包括弯曲表面的阻挡边缘表面,所述第一阻挡表面基本平行于所述第二阻挡表面。所述方法包括相对于第一阻挡表面和第二阻挡表面基本对称地定位第一传感器和第二传感器,所述第一传感器包括一对第一传感器导电引脚,并且所述第二传感器包括一对第二传感器导电引脚。所述方法还包括将所述一对第一传感器导电引脚和所述一对第二传感器导电引脚嵌入基板中。所述方法还包括将第三传感器与第一传感器和第二传感器基本平行地对准,所述第三传感器包括一对第三传感器导电引脚。所述方法还包括将所述一对第三传感器导电引脚嵌入基板和阻挡件中。
9.与一些其他实施方案一致,公开了一种用于确定导管中的流体的一个或多个流体流动性质的方法。所述方法包括通过从位于流体中的第一传感器生成具有第一传感器信号的第一传感器信号来响应流体流动方向的变化。所述方法还包括通过从位于流体中的第二传感器生成具有第二传感器信号的第二传感器信号来响应流体流动方向的变化。所述方法还包括将第一传感器信号与第二传感器信号进行比较以确定流动方向。所述方法还包括通过从位于流体中的第三传感器生成第三传感器信号来响应流体流动方向的变化,所述第三传感器信号具有在约三毫秒和约五毫秒之间的第三传感器信号上升时间,并且所述第三传感器信号用以提供流体流量量值信号。
10.与一些实施方案一致,公开了一种用于监视在患者和呼吸机之间流动的流体中的流体流动方向的系统。所述系统包括具有阻挡件的流体流动方向传感器,所述流体流动方
向传感器用以检测流体中的流体流动方向。所述系统还包括耦合到流体流动方向传感器的导管,所述导管用以耦合到患者和呼吸机。所述系统还包括控制系统,所述控制系统用以耦合到流体流动方向传感器以监视流体流动方向。
11.应理解,以上概述和以下详细描述都仅是示例性和解释性的,并且不限制要求保护的本发明。
12.并入本说明书并构成本说明书的一部分的附图示出了本发明的实施方案,并且连同描述一起用来解释本发明的原理。
附图说明
13.图1示出了根据本公开的一些实施方案的用于确定导管中的流体的一个或多个流体流动性质的设备的图示;
14.图2示出了根据本公开的一些实施方案的来自用于插入在导管中从左向右流动的流体中的阻挡件的计算流体动力学模型的流量分布;
15.图3a示出了根据本公开的一些实施方案的薄膜流量传感器的图示;
16.图3b示出了根据本公开的一些实施方案的图3a所示的薄膜传感器元件的图示;
17.图3c示出了根据本公开的一些实施方案的图3a和图3b所示的薄膜传感器元件的横截面视图的图示;
18.图4示出了根据本公开的一些实施方案的用于制造确定流体的流动方向的设备的方法的流程图;
19.图5示出了根据本公开的一些实施方案的用于确定导管中的流体的一个或多个流体流动性质的方法的流程图;
20.图6示出了根据本公开的一些实施方案的用于监视在患者和呼吸机之间流动的流体中的流体流动方向的系统的框图;
21.图7示出了根据本公开的一些实施方案的用于确定在导管中流动的流体的一个或多个流体流动性质的方法的流程图;以及
22.图8示出了根据本公开的一些实施方案的用于制造确定流体的流动方向的设备的方法的流程图。
具体实施方式
23.现在将详细参考在以下进行描述并在附图中示出的本公开的示例性实施方案。在可能的情况下,将始终使用相同的附图标记指代相同或相似的零件。
24.尽管本文参考用于特定应用的说明性实施方案描述了本发明,但是应当理解,本发明不限于此。具有本领域普通技术并且可以访问本文提供的教导的人与将认识到所有落入本公开范围内的其他修改、应用、实施方案以及等同物的替代。因此,本公开不应被视为由前述或以下描述限制。
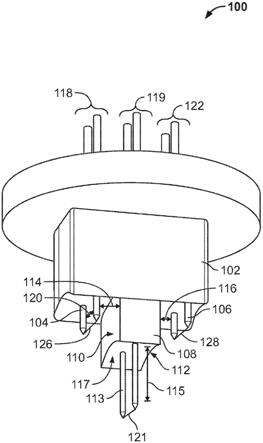
25.图1示出了根据本公开的一些实施方案的用于确定导管中的流体的一个或多个流体流动性质的设备100的图示。示例性流体包括气体和液体。设备100包括基板102、耦合到基板102的第一传感器104以及耦合到基板102的第二传感器106。基板102包括具有第一阻挡表面110和第二阻挡表面112的阻挡件108。第一传感器104位于与第一阻挡表面110相距
第一传感器距离114处。第二传感器106位于与第二阻挡表面112相距第二传感器距离116处。在一些实施方案中,第一传感器距离114基本等于第二传感器距离116,并且第一阻挡表面110基本平行于第二阻挡表面112。在一些实施方案中,第三传感器113耦合到基板102。在一些实施方案中,第一传感器104和第二传感器106是流体流量传感器。
26.在一些实施方案中,用于确定在导管中流动的流体的一个或多个流体性质的设备100包括:基板102,其包括具有第一阻挡表面110和第二阻挡表面112的阻挡件108;第一传感器104,诸如速度传感器、流量传感器或其他传感器用以检测其他流体性质以生成第一速度传感器信号,所述第一传感器位于距第一阻挡表面110相距第一传感器距离114处;和第二传感器106,诸如速度传感器、流量传感器或其他传感器用以检测其他流体性质以生成第二速度传感器信号,所述第二传感器106位于与第二阻挡表面112相距第二传感器距离116处,其中选择第一传感器距离114和第二传感器距离116以便以能够根据第一速度传感器信号和第二速度传感器信号确定一个或多个流体流动性质的方式干扰流体在导管中流动。
27.图2示出了根据本公开的一些实施方案的用于插入在导管中从左向右流动的流体中的阻挡件的计算流体动力学模型的流量分布。通过比较阻挡件处的流线能够看出,阻挡件左侧(上游)的流动速度大于阻挡件右侧(下游)的流动速度。阻挡件的“阴影”中的流线形成漩涡。当与位于阻挡件右侧的下游流线相比时,位于阻挡件左侧的上游流线指示阻挡件左侧的流动速度大于阻挡件右侧的流动速度。
28.再次参考图1,在操作中,设备100耦合到导管,使得第一传感器104、第二传感器106和第三传感器113与流体接触。当流体沿从第一传感器104到第二传感器106的方向流动时,流体遇到第一传感器104、阻挡件108和第二传感器106。阻挡件108在第二传感器106上投射“阴影”。参考图2,并且如图2所示,在第一传感器104处(阻挡件的上游)的流率大于在第二传感器106处(阻挡件的下游)的流率。因此,在特定时间点,第一传感器104生成第一传感器信号,第二传感器106生成第二传感器信号,并且因为第一传感器104处的流率大于第二传感器106处的流率,所以第一传感器信号大于第二传感器信号。因此,能够确定流体的流动方向。第三传感器113在第三传感器113处生成指示流率或流量量值的信号。在一些实施方案中,第三传感器113与第一传感器104或第二传感器106组合用于检测流体的流动方向。设备100的动态范围为每分钟约0.05升至每分钟约300升。
29.基板102提供用于安装第一传感器104、第二传感器106和第三传感器113的基座。第一传感器104包括一对第一传感器导电引脚118。在一些实施方案中,所述一对第一传感器导电引脚118包括在所述一对第一传感器导电引脚118之间的距离120,所述距离在约0.07英寸和0.12英寸之间。第二传感器106包括一对第二传感器导电引脚122。第三传感器113包括一对第三传感器导电引脚119。如图1所示,所述一对第一传感器导电引脚118耦合到第一传感器元件126并嵌入在基板102中。所述一对第一传感器导电引脚118延伸穿过基板102并且可用于电连接。另外,如图1所示,所述一对第二传感器导电引脚122耦合到第二传感器元件128并嵌入在基板102中。所述一对第二传感器导电引脚122延伸穿过基板102并且可用于电连接。此外,如图1所示,所述一对第三传感器导电引脚119耦合到第三传感器元件121并嵌入在基板102和阻挡件108中。所述一对第三传感器导电引脚119延伸穿过基板102并且可用于电连接。
30.基板102还包括阻挡件108。阻挡件108包括第一阻挡表面110和第二阻挡表面112。
在一些实施方案中,第一阻挡表面110基本平行于第二阻挡表面112。在一些实施方案中,第一传感器104和第二传感器106相对于第一阻挡表面110和第二阻挡表面112基本对称地定位。当第一传感器104和第二阻挡表面112之间的距离以及第二传感器106和第一阻挡表面110之间的距离基本相等时,第一传感器104和第二传感器106相对于第一阻挡表面110和第二阻挡表面112基本对称地定位。
31.在一些实施方案中,通过模制诸如聚碳酸酯的非导电可模制塑料来形成基板102和阻挡件108,以形成包括第一传感器104、第二传感器106和第三传感器113的整体结构。所述一对第一传感器导电引脚118、所述一对第二传感器导电引脚122和所述一对第三传感器导电引脚119也被嵌入在基板102中。模制过程使得能够在第一传感器104相对于第一阻挡表面110,第二传感器106相对于第二阻挡表面112并且第三传感器113相对于阻挡边缘表面117的定位具有严格公差的情况下制造设备100,所述阻挡边缘表面117在一些实施方案中包括弯曲表面。模制过程还使得能够制造具有基本与第二阻挡表面112平行的第一阻挡表面110的设备100。
32.第一传感器104位于与第一阻挡表面110相距第一传感器距离114处。在一些实施方案中,第一传感器距离114在约0.020英寸和约0.100英寸之间。在一些实施方案中,第一传感器距离114在约0.030英寸和约0.050英寸之间。在一些实施方案中,第一传感器距离在约0.035英寸和约0.045英寸之间。在一些实施方案中,第一传感器距离114为约0.040英寸。在一些实施方案中,第一传感器104和第二传感器106各自位于由阻挡件108产生的涡旋中。
33.第二传感器106位于与第二阻挡表面112相距第二传感器距离116处。在一些实施方案中,第二传感器距离116在约0.020英寸和约0.100英寸之间。在一些实施方案中,第二传感器距离116在约0.030英寸和约0.050英寸之间。在一些实施方案中,第二传感器距离116在约0.035英寸和约0.045英寸之间。在一些实施方案中,第二传感器距离116为约0.040英寸。
34.在一些实施方案中,选择第一传感器距离114和第二传感器距离116以响应于流体流动方向的阶跃函数变化而最大化在第一传感器104处生成的第一传感器信号和在第二传感器106处生成的第二传感器信号之间的差异。
35.第三传感器113位于距阻挡边缘表面117第三传感器距离115处。在一些实施方案中,第三传感器距离115高达约0.180英寸。在一些实施方案中,第三传感器距离115为约0.180英寸。
36.第一传感器104、第二传感器106和第三传感器113是流体流量传感器。流体流量传感器能够检测流体流量的量值。第一传感器104、第二传感器106和第三传感器113不限于特定类型的流体流量传感器。快速响应、高灵敏度和宽动态范围是流体流量传感器的期望特性。宽动态范围提高了可测量的流量分辨率,且在低流量应用中特别有用。还期望有小的形状因数,特别是在呼吸应用中。
37.在一些实施方案中,第一传感器104、第二传感器106和第三传感器113是热弥散流量传感器。热弥散流量传感器的工作原理是将加热的传感器放置在流量管内,并通过电子方式测量由流动的流体从传感器移除的热量。在低流率下,从传感器移除的热量较低。在较高流率下,从传感器移除的热量较高。
38.图3a示出了根据本公开的一些实施方案的薄膜流量传感器300的图示。在一些实
施方案中,第一传感器104、第二传感器106和第三传感器113(均在图1中示出)是薄膜流量传感器。薄膜流量传感器300包括耦合到薄膜传感器元件304的一对导电引脚302。所述一对导电引脚302电耦合到薄膜传感器元件304。适合用于制造所述一对导电引脚302的示例性材料包括磷青铜和金。在一些实施方案中,所述一对导电引脚302包括具有镀金的磷青铜基体。所述一对导电引脚302包括引脚间距305。在一些实施方案中,引脚间距305在约0.070英寸和约0.120英寸之间。在一些实施方案中,引脚间距为约0.070英寸。
39.图3b示出了根据本公开的一些实施方案的图3所示的薄膜传感器元件304的图示。薄膜传感器元件304包括非导电基板306。适合用于与非导电基板306的制造相关的示例性材料包括玻璃、玻璃聚合物和聚合物。非导电基板306不限于具有特定形状。圆柱体、圆柱纤维和方纤维是适合用于制造非导电基板306的示例性形状。在一些实施方案中,非导电基板306是基本圆柱形的,具有直径308、金属涂层310和圆柱形轴线312。基本圆柱形的非导电基板具有笔直的平行侧面和圆形横截面。在一些实施方案中,直径308为约0.002英寸。在一些实施方案中,金属涂层310包括诸如金、铜或铂的导电金属。在一些实施方案中,金属涂层310是铂。
40.图3c示出了根据本公开的一些实施方案的图3a和图2b所示的薄膜传感器元件304的横截面视图315的图示。在一些实施方案中,薄膜传感器元件304是镀铂的玻璃丝。横截面视图315示出了直径308和金属涂层310。在一些实施方案中,直径308在约0.001英寸和约0.010英寸之间。在一些实施方案中,直径308在约0.001英寸和约0.005英寸之间。在一些实施方案中,直径308在约0.001英寸和约0.003英寸之间。在一些实施方案中,直径308为约0.002英寸。
41.图4示出了根据本公开的一些实施方案的用于制造确定流体的流动方向的设备的方法400的流程图。方法400包括:形成基板,所述基板包括阻挡件,所述阻挡件具有第一阻挡表面、第二阻挡表面和包括弯曲表面的阻挡边缘表面,所述第一阻挡表面基本平行于所述第二阻挡表面(框402);相对于第一阻挡表面和第二阻挡表面基本对称地定位第一传感器和第二传感器,所述第一传感器包括一对第一传感器导电引脚,并且所述第二传感器包括一对第二传感器导电引脚(框404);以及将所述一对第一传感器导电引脚和所述一对第二传感器导电引脚嵌入基板中(框406)。在一些实施方案中,方法400还包括:将第三传感器与第一传感器和第二传感器基本平行地对准,所述第三传感器包括一对第三传感器导电引脚;以及将所述一对第三传感器导电引脚嵌入基板和阻挡件中。在一些实施方案中,在方法400中,形成基板包括由诸如聚碳酸酯的非导电可模制塑料模制基板以形成整体结构。
42.图5示出了根据本公开的一些实施方案的用于确定导管中的流体的一个或多个流体流动性质的方法500的流程图。方法500包括:通过从位于流体中的第一传感器生成第一传感器信号来响应流体流动方向的变化(框502);通过从位于流体中的第二传感器生成第二传感器信号来响应流体流动方向的变化(框504);以及将所述第一传感器信号与所述第二传感器信号进行比较以确定流动方向(框506)。
43.在一些实施方案中,通过从位于流体中的第一传感器生成第一传感器信号并从位于流体中的第二传感器生成第二传感器信号来响应流体流动方向的阶跃函数变化包括生成具有在约三毫秒和约五毫秒之间的上升时间的第一传感器信号以及生成具有在约三毫秒和约五毫秒之间的上升时间的第二传感器信号。在一些实施方案中,在方法500中,通过
从位于流体中的第一传感器生成第一传感器信号并从位于流体中的第二传感器生成第二传感器信号来响应流体流动方向的阶跃函数变化包括生成具有约四毫秒的上升时间的第一传感器信号以及生成具有约四毫秒的上升时间的第二传感器信号。
44.在一些实施方案中,方法500还包括通过从位于流体中的第三传感器生成第三传感器信号来响应流体流动方向的阶跃函数变化,所述第三传感器信号具有在约三毫秒和约五毫秒之间的第三传感器信号上升时间,并且所述第三传感器信号用以提供流体流量量值信号。
45.在一些实施方案中,生成具有快速第一传感器信号上升时间的第一传感器信号和生成具有快速第二传感器信号上升时间的第二传感器信号包括生成近似等于所述快速第二传感器信号上升时间的所述快速第一传感器信号上升时间,其中流体流量的阶跃函数变化被应用到所述第一传感器和所述第二传感器。
46.图6示出了用于监视在患者602和呼吸机604之间流动的流体中的流体流动方向的系统600的框图。系统600包括具有诸如图1所示的阻挡件108的阻挡件的流体流动方向传感器606。所述流体流动方向传感器606耦合到导管608。在操作中,导管606流体耦合到患者602和呼吸机604。在一些实施方案中,系统600包括诸如电子控制系统的控制系统610以耦合到流体流动方向传感器606以监视流动方向。适合用于与系统600结合使用的示例性传感器包括图1所示和上述的传感器。在一些实施方案中,导管608具有沙漏形状,其中流体流动方向传感器606位于导管608的最窄点。
47.图7示出了根据本公开的一些实施方案的用于确定在导管中流动的流体的一个或多个流体流动性质的方法700的流程图。方法700包括:在流体中提供阻挡件以引起在导管中流动的流体的上游特性和下游特性之间的差异,所述阻挡件具有第一阻挡表面和第二阻挡表面(框702);距第一阻挡表面第一距离定位第一传感器,所述第一传感器用以生成第一传感器信号(框704);距第二阻挡表面第二距离定位第二传感器,所述第二传感器用以生成第二传感器信号(框706);以及处理所述第一传感器信号和所述第二传感器信号以确定在导管中流动的流体的一个或多个流体流动性质(框708)。
48.图8示出了根据本公开的一些实施方案的用于制造确定流体的流动方向的设备的方法800的流程图。方法800包括:形成基板,所述基板包括具有第一阻挡表面和第二阻挡表面的阻挡件(框802);距第一阻挡表面第一距离定位第一传感器,所述第一传感器用以生成第一传感器信号(框804);距第二阻挡表面第二距离定位第二传感器,所述第二传感器用以生成第二传感器信号(框806);以及将所述第一传感器和所述第二传感器耦合到基板,所述第一传感器信号和所述第二传感器信号被处理以确定流体的流动方向(框808)。
49.贯穿本说明书提及“实施方案”、“一些实施方案”或“一个实施方案”意味着结合所述实施方案加以描述的特定特征、结构、材料或特性包括在本公开的至少一个实施方案中。因此,贯穿本说明书中不同位置出现的诸如“在一些实施方案中”、“在一个实施方案中”或“在实施方案中”的短语未必是指本公开的同一个实施方案。此外,在一个或多个实施方案中,特定的特征、结构、材料或特性可以用任何合适的方式组合。
50.尽管已经示出和描述了解释性实施方案,但是本领域技术人员将理解,以上实施方案不能解释为限制本公开,并且可以在不脱离本公开的精神、原理和范围的情况下对实施方案进行改变、替代和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。