1.本发明涉及空间驱动机构真空高低温环境模拟及试验验证领域,具体地说是一种模拟空间驱动机构在轨力矩负载及径向负载的复合加载装置。
背景技术:
2.空间驱动机构在轨工作,除了需要承受真空、高低温、辐照等空间环境外,还需承受工作时所带来的各种类型载荷,例如运转时所克服的力矩阻力,机构启动时所带来的惯性负载,自身重力引起的对于支撑轴承的作用力等。在一些应用环境中,例如天线驱动机构,负载只以惯性负载形式存在,施加比较简单。而在深空探测领域,在一些星球表面工作时,由于重力作用的影响,机构所承受的负载表现为力矩负载、惯性负载及轴端作用力的共同作用,而且几种负载量级都很大。在单机研制阶段,机构产品的真空高低温下性能测试及考核需要在真空环模设备中进行,以往负载模拟装置只是针对单一负载进行模拟,需要设计一套加载装置,在有限空间内,同时实现以上三种负载模拟。目前,尚无真空高低温环境下可同时实现三种负载模拟的加载装置的报道。
技术实现要素:
3.本发明的目的是针对空间驱动机构环模试验应用需求,提出一种可应用于真空高低温环境下,并且同时实现力矩负载、惯性负载及轴端作用力模拟的加载装置,利用该加载装置,可在有限空间的真空环模设备中,对机构产品实现准确的载荷施加。
4.一种真空高低温复合加载装置,包括真空高低温环模设备、驱动机构、加载杠杆、轴承组件、联轴器、转接支撑座、力矩传感器、惯性负载和磁粉制动器;
5.真空高低温环模设备内,驱动机构通过支架安装在真空高低温环模设备底板上,驱动机构的输出轴通过联轴器与转接支撑座相连,转接支撑座和驱动机构固定在同一块底板上,转接轴与真空高低温环模设备上的磁流体密封轴相连;
6.加载杠杆的末端吊挂砝码,加载杠杆通过一对轴承组件,将砝码的重力转化为径向力施加到驱动机构上;
7.力矩传感器、惯性负载和磁粉制动器位于真空高低温环模设备外,力矩传感器、惯性负载和磁粉制动器通过支架安装在同一块底板上,力矩传感器、惯性负载和磁粉制动器之间均通过弹性联轴器连接;
8.加载杠杆上的轴承组件中,转动轴通过支撑轴承安装在杠杆本体上,两端由第一轴承盖固定;旋转顶块通过转动轴承固定在转动轴上,两端由第二轴承盖固定。
9.所述加载杠杆的轴承组件、转接支撑座中的轴承为固体润滑轴承,固体润滑轴承的材料选用线膨胀系数一致的材料。
10.带有磁流体密封轴的真空高低温环模设备,实现机构的真空环境模拟。
11.在驱动机构输出轴端,采用空间固体润滑轴承作为支撑的加载杠杆,实现轴端作用力的施加。
12.在真空高低温环模设备外,采用磁流体密封轴与机构输出轴相连的力矩加载设备。
13.在真空高低温环模设备外,采用磁流体密封轴与机构输出轴相连的惯性负载加载装置。
14.本发明与现有技术相比有益效果:
15.1)本发明采用组合设计,将加载装置集成到真空高低温环模设备上,可同时实现机构产品力矩负载,惯性负载及轴端作用力的施加;
16.2)本发明环境适应性好,真空环模设备内,加载杠杆的的轴承组件、转接支撑座中轴承为固体润滑轴承,且材料选用线膨胀系数一致的材料,极大降低了真空高低温环境下加载装置引入的额外的摩擦力矩;
17.3)力矩负载及惯性负载置于真空高低温环模设备外,降低了对力矩传感器及磁粉制动器的使用要求,避免了真空高低温环境对加载准确性的影响;
18.4)同轴适应性好,在机构输出端与磁流体密封轴之间增加转接支撑轴,在真空设备外即可实现机构和转接轴之间同轴度的调节,避免了在真空设备中对机构和磁流体密封轴同轴进行调节,极大降低了磁流体密封轴扰动对机构输出轴的影响;
19.5)轻量化设计:采用杠杆加载装置,极大缩小了加载装置体积及质量;需要时还可在真空设备外增加增速装置,在有限空间内实现较大力矩负载和惯性负载的施加。
附图说明
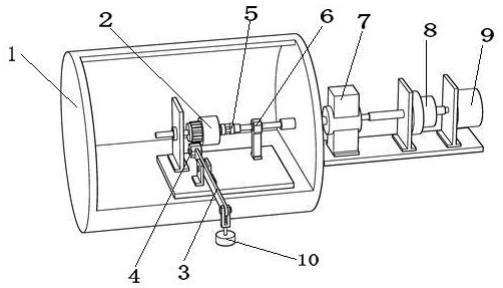
20.图1为本发明的总体结构示意图;
21.图2为杠杆加载装置轴承组件示意图。
具体实施方式
22.参阅图1和图2所示,一种真空高低温复合加载装置,包括真空高低温环模设备1、驱动机构2、加载杠杆3、轴承组件4、联轴器5、转接支撑座6、力矩传感器7、惯性负载8和磁粉制动器9;
23.真空高低温环模设备1内,驱动机构2通过支架安装在真空高低温环模设备1底板上,驱动机构2的输出轴通过联轴器5与转接支撑座6相连,转接支撑座6和驱动机构2固定在同一块底板上,转接轴与真空高低温环模设备1上的磁流体密封轴相连;
24.加载杠杆3的末端吊挂砝码10,加载杠杆3通过一对轴承组件,将砝码10的重力转化为径向力施加到驱动机构2上;
25.力矩传感器7、惯性负载8和磁粉制动器9位于真空高低温环模设备1外,力矩传感器7、惯性负载8和磁粉制动器9通过支架11安装在同一块底板上,力矩传感器7、惯性负载8和磁粉制动器9之间均通过弹性联轴器连接;
26.加载杠杆3上的轴承组件4中,转动轴44通过支撑轴承43安装在杠杆本体41上,两端由第一轴承盖42固定;旋转顶块47通过转动轴承46固定在转动轴44上,两端由第二轴承盖45固定。
27.所述加载杠杆3的轴承组件4、转接支撑座6中的轴承为固体润滑轴承,固体润滑轴承的材料选用线膨胀系数一致的材料。
28.本发明的发明点:
29.1、真空高低温环模设备内,通过固体润滑轴承组件杠杆加载的方式,实现较大的轴端力的施加;
30.2、在驱动机构和磁流体密封轴之间增加固体润滑轴承支撑的转接轴,在降低装配难度、保证安装同轴度的同时增加极小的摩擦力矩。
技术特征:
1.一种真空高低温复合加载装置,其特征在于:包括真空高低温环模设备(1)、驱动机构(2)、加载杠杆(3)、轴承组件(4)、联轴器(5)、转接支撑座(6)、力矩传感器(7)、惯性负载(8)和磁粉制动器(9);真空高低温环模设备(1)内,驱动机构(2)通过支架安装在真空高低温环模设备(1)底板上,驱动机构(2)的输出轴通过联轴器(5)与转接支撑座(6)相连,转接支撑座(6)和驱动机构(2)固定在同一块底板上,转接轴与真空高低温环模设备(1)上的磁流体密封轴相连;加载杠杆(3)的末端吊挂砝码(10),加载杠杆(3)通过一对轴承组件,将砝码(10)的重力转化为径向力施加到驱动机构(2)上;力矩传感器(7)、惯性负载(8)和磁粉制动器(9)位于真空高低温环模设备(1)外,力矩传感器(7)、惯性负载(8)和磁粉制动器(9)通过支架(11)安装在同一块底板上,力矩传感器(7)、惯性负载(8)和磁粉制动器(9)之间均通过弹性联轴器连接;加载杠杆(3)上的轴承组件(4)中,转动轴(44)通过支撑轴承(43)安装在杠杆本体(41)上,两端由第一轴承盖(42)固定。旋转顶块(47)通过转动轴承(46)固定在转动轴(44)上,两端由第二轴承盖(45)固定。2.根据权利要求1所述的一种真空高低温复合加载装置,其特征在于:所述加载杠杆(3)的轴承组件(4)、转接支撑座(6)中的轴承为固体润滑轴承,固体润滑轴承的材料选用线膨胀系数一致的材料。
技术总结
一种真空高低温复合加载装置,包括真空高低温环模设备、驱动机构、加载杠杆、轴承组件、联轴器、转接支撑座、力矩传感器、惯性负载和磁粉制动器。带有磁流体密封轴的真空高低温环模设备,能实现机构的真空环境模拟。在驱动机构输出轴端,采用空间固体润滑轴承作为支撑的加载杠杆,实现轴端作用力的施加。在真空高低温环模设备外,采用磁流体密封轴与机构输出轴相连的力矩加载设备。在真空高低温环模设备外,采用磁流体密封轴与机构输出轴相连的惯性负载加载装置。在真空高低温环境下,本发明能同时实现力矩负载、惯性负载及轴端作用力模拟,可在有限空间的真空环模设备中,对机构产品实现准确的载荷施加。现准确的载荷施加。现准确的载荷施加。
技术研发人员:刘雅芳 郝宏 袁宝峰 曹珍 邹猛 杨雪峰
受保护的技术使用者:北京空间飞行器总体设计部
技术研发日:2021.08.13
技术公布日:2021/11/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。