1.本发明涉及深空探测星球车技术领域,具体涉及一种用于真空高低温环境下星球车牵引力测试装置。
背景技术:
2.在深空探测中,星球车用于携带科学载荷完成星球表面的科学探测,六轮星球车是当前国际上主要采用的方案,我国火星车采用了主动悬架机构,能够实现车体高度改变(《一种星球车可变主动悬架机构》cn 201911135824.9,《六轮星球探测车可伸缩悬架机构》cn200810209565.5),星球车在星球表面执行任务期间,需要在平地、坡道等不同路面行驶,为验证星球车在轨行驶能力,需要在实验室开展星球车牵引力测试工作。
技术实现要素:
3.本发明提供了一种用于真空高低温环境下星球车牵引力测试装置,能够适应星球车体通过主动悬架变形,给6个棘爪式车轮独立施加阻力矩负载,能够完成在真空高低温环境下星球车牵引力测试。
4.一种用于真空高低温环境下星球车牵引力测试装置,包括机架、6套车轮阻力加载单元、牵引绳、拉力传感器、测试及控制机柜;
5.所述车轮阻力加载单元包括加载主动轮、履带、从动轮、支撑柱、扭矩及转速传感器、加载电机及减速器;
6.6套车轮阻力加载单元安装在机架上,车轮阻力加载单元之间的距离与星球车车轮间距匹配;星球车位于车轮阻力加载单元上,星球车的棘爪车轮与履带接触,履带表面具有棘爪式拨片结构,星球车的棘爪车轮与履带表面的棘爪式拨片结构相接触;拉力传感器安装在星球车车体上,拉力传感器通过牵引绳与机架连接,牵引绳与机架的连接点与星球车质心在同一高度,避免对星球车产生附件弯矩影响;
7.履带需要具有预定长度,当星球车主动悬架变形时,车体升高或降低,棘爪车轮能够在履带上前后移动。
8.车轮阻力加载时,由测试及控制机柜给出控制信号,加载电机及减速器带动加载主动轮旋转,加载主动轮带动履带和从动轮运动,履带上的棘爪式拨片结构与星球车的棘爪车轮相互接触作用,从而产生车轮阻力。
9.测试时,车轮阻力加载单元首先进入空载控制模式,星球车向前运动,加载主动轮带动履带和从动轮与加载主动轮相同速度运动,此时拉力传感器示数较小,主要由车轮阻力加载单元转动轴系摩擦引起的误差。逐步增加车轮阻力即扭矩传感器示数增大,星球车车轮带载运动,此时拉力传感器示数为星球车的牵引力。
10.6套车轮阻力加载单元独立控制,能实现星球车上下坡过程中前中后轮不同负载的模拟。
11.所述机架采用工字钢拼接,具有较高刚度,在测试过程中机架不发生变形;在机架
表面包覆有隔热材料,避免在高低温环境下机架温度过高或过低产生变形。
12.所述牵引绳采用凯夫拉材料,具有质量轻且耐高低温环境的特点。
13.所述拉力传感器采用单向拉压传感器,拉力传感器包覆有隔热材料,避免高低温环境下温度引起传感器示数漂移。
14.所述加载主动轮和从动轮均采用陶瓷轴承,避免高低温环境下转动副变形摩擦力增大增加测试误差。
15.所述履带上的棘爪式拨片结构为非金属材料,棘爪式拨片结构与星球车的棘爪车轮上的棘爪相互作用,模拟车轮转动过程中行进阻力。
16.所述扭矩及转速传感器用于测试加载主动轮的转速和力矩,实现履带运动速速与加载主动轮转速相匹配,通过力矩得到给车轮施加的阻力负载;扭矩及转速传感器具有保温措施,避免温漂。
17.所述加载电机及减速器用于驱动加载主动轮,实现车轮阻力加载;加载电机及减速器均采用固体润滑,以适应真空环境,且同样具有保温措施,避免高低温引起转动副卡滞。
18.所述测试及控制机柜用于测试拉力传感器、扭矩及转速传感器示数,通过闭环反馈控制驱动加载电机运动。
19.本发明的有益效果:
20.本发明能够适应星球车体通过主动悬架变形,给6个棘爪式车轮独立施加阻力矩负载,能够完成在真空高低温环境下星球车牵引力测试。
附图说明
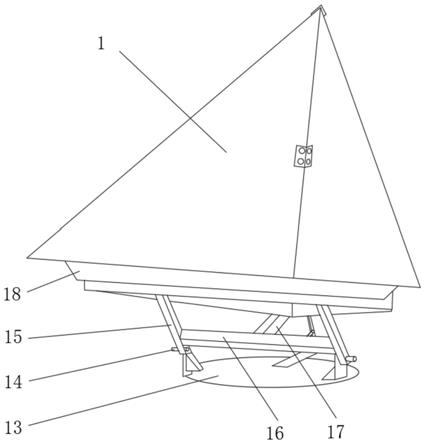
21.图1为本发明侧视图;
22.图2为本发明俯视图。
具体实施方式
23.参阅图1和图2所示,一种用于真空高低温环境下星球车牵引力测试装置,包括机架1、6套车轮阻力加载单元2、牵引绳3、拉力传感器4、测试及控制机柜5;
24.所述车轮阻力加载单元2包括加载主动轮2
‑
1、履带2
‑
2、从动轮2
‑
3、支撑柱2
‑
4、扭矩及转速传感器2
‑
5、加载电机及减速器2
‑
6;
25.6套车轮阻力加载单元2安装在机架1上,车轮阻力加载单元2之间的距离与星球车车轮间距匹配;星球车位于车轮阻力加载单元2上,星球车的棘爪车轮7与履带2
‑
2接触,履带2
‑
2表面具有棘爪式拨片结构2
‑
7,星球车的棘爪车轮7与履带2
‑
2表面的棘爪式拨片结构2
‑
7相接触;拉力传感器4安装在星球车体6上,拉力传感器4通过牵引绳3与机架1连接,牵引绳3与机架1的连接点与星球车质心在同一高度,避免对星球车产生附件弯矩影响;
26.履带2
‑
2需要具有预定长度,当星球车主动悬架变形时,车体升高或降低,棘爪车轮7能够在履带2
‑
2上前后移动。
27.车轮阻力加载时,由测试及控制机柜给出控制信号,加载电机及减速器2
‑
6带动加载主动轮2
‑
1旋转,加载主动轮2
‑
1带动履带2
‑
2和从动轮2
‑
3运动,履带2
‑
2上的棘爪式拨片结构与星球车的棘爪车轮7相互接触作用,从而产生车轮阻力。
28.测试时,车轮阻力加载单元2首先进入空载控制模式,星球车向前运动,加载主动轮2
‑
1带动履带2
‑
2和从动轮2
‑
3与加载主动轮2
‑
1相同速度运动,此时拉力传感器4示数较小,主要由车轮阻力加载单元2转动轴系摩擦引起的误差。逐步增加车轮阻力即扭矩传感器示数增大,星球车车轮带载运动,此时拉力传感器4示数为星球车的牵引力。
29.6套车轮阻力加载单元2独立控制,能实现星球车上下坡过程中前中后轮不同负载的模拟。
30.所述机架1采用工字钢拼接,具有较高刚度,在测试过程中机架不发生变形;在机架1表面包覆有隔热材料,避免在高低温环境下机架温度过高或过低产生变形。
31.所述牵引绳3采用凯夫拉材料,具有质量轻且耐高低温环境的特点。
32.所述拉力传感器4采用单向拉压传感器,拉力传感器4包覆有隔热材料,避免高低温环境下温度引起传感器示数漂移。
33.所述加载主动轮2
‑
1和从动轮2
‑
3均采用陶瓷轴承,避免高低温环境下转动副变形摩擦力增大增加测试误差。
34.所述履带2
‑
2上的棘爪式拨片结构2
‑
7位非金属材料,棘爪式拨片结构2
‑
7与星球车的棘爪车轮7上的棘爪相互作用,模拟车轮转动过程中行进阻力。
35.所述扭矩及转速传感器2
‑
5用于测试加载主动轮2
‑
1的转速和力矩,实现履带2
‑
2运动速速与加载主动轮2
‑
1转速相匹配,通过力矩得到给车轮施加的阻力负载;扭矩及转速传感器2
‑
5具有保温措施,避免温漂。
36.所述加载电机及减速器2
‑
6用于驱动加载主动轮2
‑
1,实现车轮阻力加载;加载电机及减速器2
‑
6均采用固体润滑,以适应真空环境,且同样具有保温措施,避免高低温引起转动副卡滞。
37.所述测试及控制机柜5用于测试拉力传感器4、扭矩及转速传感器2
‑
5示数,通过闭环反馈控制驱动加载电机运动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。