技术特征:
1.基于机器视觉技术控制螺栓拧紧的装置,包括视觉跟踪系统,视觉跟踪系统的相机用于实时获取工具输出端在相机坐标系的位置p及其方向向量n,并将其获取的数据反馈给视觉跟踪系统的控制模块;视觉跟踪系统的控制模块包括存储器、处理器及存储在存储器上并可在处理器上运行的程序;其特征在于,所述处理器执行所述程序时实现以下步骤:步骤1,判断工具输出端所处状态,若工具输出端仅靠近单个螺栓,则继续执行步骤2;若工具输出端同时靠近多个螺栓,则继续执行步骤11;步骤11,判断多个螺栓是否有依附,若是,则排除优先级低的螺栓;若否,则比较工具输出端到各螺栓的距离,取最小距离对应的螺栓,再执行步骤3;步骤2,判断工具输出端与示教螺栓的角度是否小于阈值,若是,则工具输出端所处角度合格,继续执行步骤3,若否,则工具禁用;所述角度是指工具输出端的方向向量与示教螺栓中保存的方向向量的夹角;步骤3,判断工具输出端当前拧紧序号与示教的螺栓拧紧序号是否相符,若是,则启用工具开始拧紧螺栓,若否,则工具禁用。2.根据权利要求1所述的装置,其特征在于:步骤11中,若工具输出端处于多个螺栓的公差带的重叠区域,则比较工具输出端到各螺栓的垂直距离,取最小垂直距离对应的螺栓。3.根据权利要求1所述的装置,其特征在于:步骤11中,多个螺栓有依附是指工具输出端与某个示教螺栓的距离小于设定的阈值,并且位于该螺栓的竖直方向上。4.一种采用如权利要求1
‑
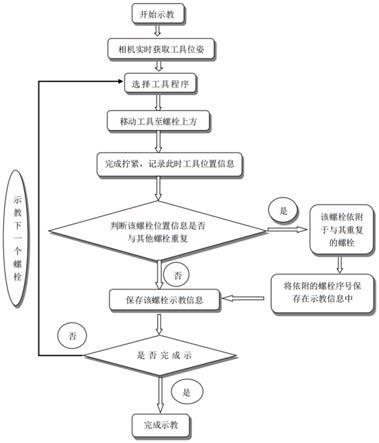
3任一项所述装置的控制螺栓拧紧的方法,其特征在于,步骤包括:步骤a,在某个类型的产品生产时,以第一个产品作为示教模板,将拧紧工具按照工艺顺序依次移动至产品的螺栓上方,借助于所述装置的视觉跟踪系统的相机实时获取工具输出端在相机坐标系的位置p、方向向量n和每个螺栓对应的拧紧序号;步骤b,从第二个产品开始,借助于所述装置的视觉跟踪系统跟踪工具输出端在空间的位置,并实时计算工具输出端与所有螺栓的距离以及角度;如果同时满足下列b1、b2、b3三个条件,则判断此时的工具输出端所处位置符合要求;条件b1、工具输出端所处位置与距某螺栓的距离小于预设偏差值;条件b2、工具输出端与某螺栓的角度小于预设阈值;条件b3、当前的拧紧序号与示教的螺栓拧紧序号相符;步骤c,所述装置的视觉跟踪系统向工具发送对应的拧紧序号,并启用工具,完成拧紧后,提示下一个需要拧紧的螺栓的位置;按照提示依次完成所有螺栓拧紧后,提示该产品装配完成。5.根据权利要求4所述的方法,其特征在于:对于需要先按顺序预紧螺栓再拧紧螺栓的产品,在对该产品进行示教的过程中,每示教一个螺栓位置,便判断该位置与已经示教的螺栓的距离,如果该位置与某个示教螺栓的距离小于设定阈值,且位于该螺栓的竖直方向上,便认定当前示教螺栓依附于上次示教的螺栓,然后将该信息一同保存于视觉跟踪系统中;在实施拧紧工序时,先判断螺栓依附情况,分出优先级,再按照优先级顺序实施拧紧。
技术总结
本发明提供了基于机器视觉技术控制螺栓拧紧的装置及方法,装置包括视觉跟踪系统,其处理器执行程序时实现以下步骤:判断工具输出端所处状态,判断多个螺栓是否有依附,判断工具输出端与示教螺栓的角度是否小于阈值,判断工具输出端当前拧紧序号与示教的螺栓拧紧序号是否相符;控制螺栓拧紧的方法需同时满足下列三个条件:工具输出端所处位置与距某螺栓的距离小于预设偏差值,工具输出端与某螺栓的角度小于预设阈值,当前的拧紧序号与示教的螺栓拧紧序号相符。采用本发明方案,能够使得顺序控制过程更准确、客观,能够对同一个位置进行多次示教,可靠性高。可靠性高。可靠性高。
技术研发人员:黄科 游晓龙 游四清 白灵 冯亭 程平平 孔俊
受保护的技术使用者:菲烁易维(重庆)科技有限公司
技术研发日:2021.08.20
技术公布日:2021/11/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。