利用虚拟震源扫描构建方位角
‑
视速度雷达图的方法
技术领域
1.本发明涉及地震勘探领域,具体涉及到利用分析炮点建立虚拟震源,随后利用虚拟震源扫描构建方位角
‑
视速度雷达图,最终完成干扰波分析的方法。
背景技术:
2.高密度方形接收排列(也叫盒子波)是人工地震勘探中常用的一种野外干扰波调查手段,由于具有超过正常生产接收排列几倍的接收密度,且平面上360
°
无死角接收数据,能够高密度采集各方向传播过来的各类地震波,一般在正式地震作业前施工,用以确定工区干扰波的来源,辅助设计检波器组合参数。现有的盒子波分析手段一般为从接收排列中按方位角抽取地震道,构成一系列角道集,然后对每一个角道集内的数据做视速度数据叠加扫描或者视速度数据相关性扫描,以叠加或相关系数值大小绘制二维雷达图。但是,现有方法仍然存在以下的若干缺陷:1、由于实际接收排列一般按照正方形等间隔布设,导致按角道抽取的道集内地震道数并不均匀,降低了方位角分析精度;2、地震波在地层中球面而非平面传播,地震记录中非线性的同相轴形态降低了视速度分析精度;3、伴随球面传播进而带来排列内不同检波器因距离炮点远近不同接收到的能量不一致的结果,降低了叠加或相关分析精度。
技术实现要素:
3.鉴于以上技术问题,本发明的目的是针对现有技术的缺陷,提供一种方位角
‑
视速度扫描的方法,在不改变现有采集布设方案的基础上,高精度、高效地完成不同水平方位角下的地震波视速度扫描工作。
4.为达成以上技术目的,本发明采用以下技术方案:
5.步骤s1:取高密度方形排列接收的地震数据并对其进行预处理,同时获取地震过程中的炮检坐标关系;
6.步骤s2:以高密度方形排列的中心为圆心,以炮点和圆心的距离为半径,作一个圆,同时在圆周上,每间隔一定角度设置一个虚拟震源;
7.步骤s3:计算虚拟震源与高密度方形排列上所有检波器的距离;
8.步骤s4:采用不同的视速度进行扫描,得出虚拟震源到任一检波器的传播时间,同时根据传播时间以及固定时窗长度提取步骤s1中对应时窗的所有地震数据;
9.步骤s5:对步骤s4中的地震数据进行道间叠加;
10.步骤s6:重复步骤s3
‑
s5,直至完成对所有的虚拟震源的处理,以视速度大小为径向距离,绘制各角度、各径向距离上的叠加能量分布雷达图。
11.本发明的有益效果是:相对于常规视速度扫描直接抽取角道集的方法,本发明采用圆周布设虚拟震源的方式,保证任意平面角度上都可以采用全部的检波器参与运算,道集均匀,运算精度高;相对于常规视速度扫描只能在本角道集内有限几个数据道上滑动线性扫描时窗的方法,本发明在平面所有道集数据上确定时窗,时窗位置由平面炮检距除以
扫描视速度确定,非线性,符合地震波球面传播的规律,时窗提取位置更准确,分析精度高;配合上静校正及道间能量均衡的预处理操作,本发明可以在不改变野外生产方式的前提下,大幅度提高地震波视速度分析的精度。
附图说明
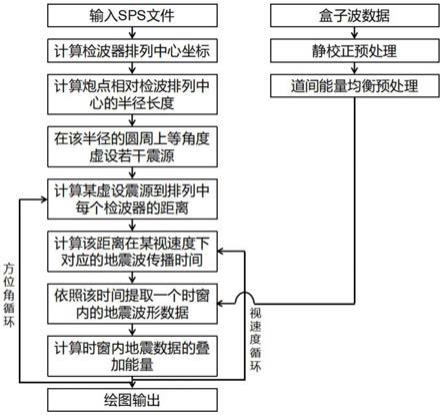
12.图1为本发明的计算流程框图;
13.图2为地下以不同垂向角度入射到检波器的地震波在地震记录上的表现简化示意图;
14.图3为震源激发地震波沿地表平面传播的形态示意图;
15.图4为根据sps确定炮点与接收排列的相对坐标关系示意图,其中s为炮点,g为检波点,r为炮点到接收排列中心的距离;
16.图5为沿炮点半径虚设震源示意图,平面每个方位角上都可以设置虚拟震源,每个虚拟震源都可以计算其到接收排列内各检波器的距离;
17.图6为本专利计算数据使用的一套野外高密度方形接收排列实例;
18.图7为局部显示的高密度方形排列原始地震数据(图7a)、静校正后的地震数据(图7b)、道间能量平衡后的地震数据(图7c);
19.图8为315
°
水平方位角,300m/s、900m/s、3000m/s视速度下的分析时窗以及135
°
水平方位角,900m/s视速度下的分析时窗;
20.图9为200ms分析时间,135
°
、315
°
水平方位角,300m/s~6000m/s视速度扫描时的叠加波形,以及600ms分析时间,135
°
、315
°
水平方位角,300m/s~6000m/s视速度扫描时的叠加波形,每一道对应一个视速度叠加结果,扫描速度间隔100m/s;
21.图10分析时间200ms和600ms对应的方位角
‑
视速度扫描雷达图。
具体实施方式
22.为使本发明的技术方案和技术优点更加清楚,下面将结合实施例和附图,对本发明的实施过程中的技术方案进行清楚、完整的描述。
23.图2解释了地震记录中相邻检波器接收的同一种类地震波存在时差的原因——地下地震波入射至检波器时带有倾角。平面相邻检波器的水平距离除以这个时差就被称为视速度,很明显垂直入射的地震波在地震记录上近乎无时差,视速度趋于无穷大;而越接近平行入射的地震波视速度越小。
24.地震波在地下以球面形式传播,映射到地表,以圆弧形向前推进,如图3所示。在以往的视速度扫描算法中,将地震波设定为平面波,将同时到达g1、g5、g9、g13检波器,将四个检波器的接收数据等时间提取出来,导致分析时窗拾取不准;本算法以等炮检距来刻画球面传播形态,地震波到达g5、g9和时间早于到达g1、g13的时间,拾取时窗时将这部分时间差考虑进去,从而得到更准确的分析时窗。
25.图2和图3说明了采用常规方法时,其误差较大而本发明的结果更加精确的原因。
26.图1是本实施例的步骤框图,如图1所示,地震数据大多为sps文件,因此,首先从sps文件中提取炮检坐标,计算炮检距离,进而计算不同视速度下的地震波在炮检之间传播的时间,然后从经过预处理后的地震数据中提取出与该时间相关的时窗内的数据,最后将
时窗内数据叠加求得均方根能量,绘制成为二维雷达图显示。
27.具体而言,首先本实施例需要利用盒子波数据,盒子波又被称为高密度方形接收排列,本发明中对高密度方形接收排列的要求是:多个检波器呈方形分布,纵横两个方向上的检波器的数量均大于10个,同时,对纵横两个方向上的检波器的具体分布情况并不具有要求,比如,本实施例可以应用于检波器分布为30
×
30的高密度方形接收排列,也可应用于10
×
30的高密度方形接收排列,但需要注意的是,应用本实施例的方法时,检波器在纵横两个方向上的数量相差越大,则最终测得的结果相对较差;相邻两个检波器之间的接收间距不大于5m。
28.需要注意的是,本实施例的流程框图虽然说的是“输入sps”文件,后从sps文件中提取相应的数据,但是,本领域技术人员应当明白的是,数据文件类型在一些情况下并不限于sps文件,采用的其余格式的、储存有本实施例需要数据的文件也在本发明的保护范围内。
29.同时,从地震数据中提取炮检坐标关系,包括炮点坐标、检波器坐标以及炮检关系。
30.对于本实施例而言,采用我国西南某地的真实地震数据进行试算,采用纵、横向33*33个检波器接收数据,接收间距3m,每一炮震源激发,可在9216m2面积上完成1089道数据的接收,试算用的炮点和检波点坐标关系如图6所示。
31.同时,提取出高密度方形排列接收的地震数据并对其进行预处理,图7a展示了实际接收的地震数据的局部,为33条接收排列中的前4条(图6所示,排在一条直线上的检波器构成一条接收排列),每条排列上有33个检波器,形成33道接收数据,每道数据展示了0~1500ms时间长度。如图2的分析,因地震波入射检波器时存在倾角,排列上各道的接收波形存在顺次的时差,时间从上至下,有多套倾斜程度不同的同相轴,表明存在着多套视速度不同的地震波种类。
32.观察图7a,时窗1内的地震波同相轴在相邻接收道上的到达时间不光滑,存在上下错动,这是由于各检波点的接收海拔高度不同所致,在方位角
‑
视速度分析中属于干扰项,需要预先排除。排除的步骤在地震资料处理过程中称为静校正,做过静校正的数据如图7b所示。对比图7a和图7b中的时窗1,可见经过静校正,消除了相邻道地震波形上下错动,倾斜的同相轴更加光滑。
33.观察图7b中的时窗2,随着检波点远离炮点(时窗中从左向右),接收到的地震波能量逐渐减小,相邻道之间的波形横向摆动幅度逐渐降低,这是地震波传播过程中的球面扩散、地层吸收等原因导致的。由于本算法采用分析时窗内的相邻道叠加来实现扫描分析,相邻道波形能量的不一致将影响最终的叠加波形形态,进而降低分析精度,因此也应该作为干扰项被提前排除。按照式1
‑
3完成各道能量均衡后的效果如图7c所示,各道间的能量相似性大大增加。
[0034][0035]
[0036][0037]
式中,x
i,t
为第i道的第t个时间采样点的地震数据值,e
i
为各道均方根能量,n为检波器数目(所有参与叠加道的数目),为各道平均能量。
[0038]
其次,如图6所示,以高密度方形接收排列的中心为圆心,从所有炮点中选择一个炮点作为分析炮,分析炮炮点和圆心的距离为半径,画一个圆,同时在圆周上,沿0
‑
360
°
、每隔一定角度设置一个虚拟震源。这些虚拟震源表示与分析炮作用距离等同的不同水平方位角的地震波动来源,其角度间隔可根据使用者的需求进行设定。同时,该步骤结合视速度扫描,还可以对噪音源进行分析:先假设每个虚拟震源都是一个“噪音”来源,计算其与所有检波器的距离d1~d9,在视速度的扫描过程中如果出现了能量的聚焦,说明在该方向上的确存在着具有这种视速度的噪音源,若没有任何能量聚焦现象,说明该噪音源不成立,从而完成噪音源分析。
[0039]
在此情况下,还需要计算虚拟震源与所有检波器的距离。
[0040]
在本实施例中,图4给出了炮检相对坐标计算示意图,计算步骤为:1)从sps文件中读取每个检波器的坐标位置,搜寻到所有检波器的中心位置坐标,以此坐标为(0,0)点,重新计算所有检波器的相对坐标;2)从sps文件中读取分析炮炮点的坐标,计算分析炮炮点相对检波器中心坐标的相对坐标;3)计算分析炮炮点距离检波器中心的距离r。
[0041]
采用不同的视速度进行扫描,得出该虚拟震源到任一检波器的传播时间,提取该传播时间对应的、位于初始地震数据中地震数据。由于包含有多个检波器,该传播时间对应的每一个检波器的数据均需要进行提取。
[0042]
图8展示了视速度扫描过程中分析时窗的变化。参照图5的水平方位角坐标规定,图8给出了第三象限的315
°
方位角上300m/s(图8a)、900m/s(图8b)、3000m/s(图8c)三种视速度的时窗取值以及第二象限的135
°
方位角上900m/s(图8d)视速度的时窗取值。时窗在各道的切割形态由各道的可变时窗起始位置t
起始i
和固定时窗宽度t
窗长
决定,具体如式4
‑
6所示。
[0043]
t
起始i
=t
分析
t
传播
ꢀꢀ
式4
[0044]
t
截止i
=t
起始i
t
窗长
ꢀꢀ
式5
[0045][0046]
t
分析
是由使用者设定的一个固定分析时刻,如图8计算时设定为200ms的时刻,这个时间没有特别规定,一般是通过观察图7中某一倾斜同相轴的最早达到时间设定,想要分析哪一条轴,就设定为多少,一旦设定,计算过程中不再改变。t
传播i
为地震波从炮点至第i个检波器的平面传播时间,该时间由虚拟震源到检波器i之间的水平传播距离d
i
与传播视速度v
视
相除得到。t
分析
和t
传播i
共同构成了每道分析时窗的上沿t
起始i
。分析时窗的下沿t
截止i
则是从上沿开始向下延伸一个固定的时窗长度t
窗长
得到,这个长度大小由使用者指定,一般能够将一个同相轴的一个正波峰和两个负波谷囊括进来为宜。
[0047]
一个水平角度上的虚拟震源完成了所有视速度扫描之后,切换至下一水平角度上的虚拟震源,直至完成所有圆周上的预设震源的视速度扫描,如图5b所示。
[0048]
扫描分析计算过程为:给定一个方位角,确定炮检距离d
i
,然后不断改变视速度,计算每道的传播时间t
传播i
,根据该时间计算出每道分析时窗的起止位置t
起始i
、t
截止i
,在原始数据中将该时窗内的数据提取出来,经叠加、提取均方根能量计算后,切换到下一方位角重复该过程,依次完成所有方位角下的计算。
[0049]
将上述过程中提取出的各接收道的地震数据叠加:将同一方位角中提取出的各接收到的地震数据进行叠加,取平均值,再将平均地震道按时间方向计算均方根能量。地震波形同相性好的叠加加强,不好的叠加削弱,再沿时间方向累加均方根能量,用能量值大小表征该方位角、视速度下的地震波有无与强弱。
[0050]
对一个水平角的能量叠加完成后,切换至下一水平角,重复上述步骤,直至0
‑
360
°
的圆周上的所有虚拟震源均完成能量叠加。
[0051]
在本实施例中,图9给出了图8中时窗内数据叠加的效果,每张图从左向右依次是300m/s~3000m/s的视速度每次递增100m/s的结果,分析时窗的长度设定为100ms。如式7所示,叠加是在时窗内将所有地震道加为1道后取平均值,若视速度选择正确,时窗能够将一条同相轴等相位地包含进来,如图8b,则叠加后平均能量增强,对应图9b中的900m/s位置处地震道,地震波幅度最大;若视速度选择不正确,叠加后能量不同程度削弱,如图9b中的300m/s、3000m/s,以及图9a中的900m/s,地震波幅度较小。图9c、9d给出了600ms分析时间得到的叠加结果,同样可以看到不同方位角下不同视速度的叠加能量存在差异。
[0052][0053]
式中,x
i,t
为第i道的第t个时间采样点的地震数据值,n为检波器数目(所有参与叠加道的数目),为平均地震道上第t个时间采样点的地震数据值。
[0054]
将每一个虚拟震源对应的地震数据均进行叠加,直至将圆周上0
‑
360
°
所有虚拟震源全部叠加完成,对叠加后的能量进行归一化处理,以视速度大小为径向、以水平方位角为环周建立二维圆形雷达图。
[0055]
在本实施例中,将图9中每道数据沿时间方向累加能量,得到与某一水平方位角α、某一视速度v相关联的一个能量值e
α,v
,将所有水平方位角、视速度的能量值计算完毕后,采用式8
‑
9所示的公式归一化为[0,1]区间,以水平方位角为圆周,以视速度大小为径向距离,可以绘制出一个二维的图件,如图10所示。该图用彩色着色,色彩值映射自[0,1]区间,色彩的变化反映了该方位角上该视速度地震波的有无及强弱。
[0056][0057][0058]
式中,为平均地震道上第t个时间采样点的地震数据值,t
窗长
为分析时窗的宽度,e
α,v
为水平方位角α、视速度v处对应的均方根能量值,e
α,vnorm
为归一化后的水平方位角α、视速度v处对应的均方根能量值。
[0059]
以上所述实施例仅为本发明的部分实施例,用于描述本发明的基本原理、实施目
的及详细流程,并不限制本发明的使用范围。凡是依据本发明的技术实质对以上实施方案所做的任何修改,等同变化与修饰,均属本发明技术方案的范畴。本发明在上文已优选实施例公开,但是本领域的技术人员应理解的是,这些实施例仅用于描述本发明,而不应理解为限制本发明的范围。在不脱离本发明原理的前提下,对本发明的进一步改进也应视为在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。