1.本发明涉及交通数据质量评估技术领域,尤其是涉及一种道路交通感知轨迹数据的质量评估方法。
背景技术:
2.随着智慧高速公路的快速发展,高速公路的路侧会部署大量智能传感器(如高清摄像头、毫米波雷达、激光雷达等)和边缘计算设备,通过多源数据融合与目标识别跟踪,就能够获取全时空道路交通感知轨迹数据,从而为微观驾驶行为感知、交通状态精准辨识、在线平行仿真推演等提供了可能。然而,道路交通感知轨迹数据的质量直接决定着交通系统分析评估和管控措施的效果,如何对道路交通感知轨迹数据质量进行评估也成为智慧公路、车路协同快速发展下亟需破解的难题。
3.目前,在道路交通感知轨迹数据质量评价方面,主要采用现场试验和数据挖掘两种方式。其中,基于现场试验手段评估道路交通感知轨迹数据质量,一般通过将待评估的道路交通感知轨迹数据与不同数据源进行数据对比与质量评价,实现对路侧感知数据的质量评价。然而,待评估的道路交通感知轨迹数据与对比数据源通常难以时空同步,评估过程费时费力,并且无法对道路交通感知轨迹数据进行系统的、全面的评估。
4.为克服这一问题,基于数据挖掘方法从数据所包含的多元信息出发,通过数据挖掘的手段对道路交通感知轨迹数据的质量进行评估。基于数据挖掘方法对道路交通感知轨迹数据进行评估,通常从轨迹的元素特征、时序特征两个维度分别提出了质量评估指标进行评估,相关方法应用广泛且实用性强。然而,现有的评估指标仅从数据的元素、时序维度出发表征数据质量,存在量化指标维度单一的问题,忽略了空间维度的异常程度也是反映道路交通感知轨迹数据质量水平的重要维度;此外,评估方法的指标权重大多由人为确定,存在主观性较强和鲁棒性较差的问题。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种道路交通感知轨迹数据的质量评估方法,通过融合多元维度的质量评估指标,以实现对道路交通感知轨迹数据质量的准确、快速评价。
6.本发明的目的可以通过以下技术方案来实现:一种道路交通感知轨迹数据的质量评估方法,包括以下步骤:
7.s1、获取道路交通感知轨迹数据,并从中提取出待评估道路交通感知轨迹数据;
8.s2、计算待评估道路交通感知轨迹数据的质量评估指标;
9.s3、建立自适应融合回归的道路交通感知轨迹数据智能评估模型;
10.s4、基于道路交通公开的历史轨迹数据集,构建仿真轨迹数据集,并基于仿真轨迹数据集对道路交通感知轨迹数据智能评估模型进行训练;
11.s5、将待评估道路交通感知轨迹数据的质量评估指标输入训练好的道路交通感知
估计数据智能评估模型,得到对应的道路交通感知轨迹数据质量评估结果。
12.进一步地,所述步骤s1具体包括以下步骤:
13.s11、基于道路路侧布设的传感器,获取道路交通感知轨迹数据,并从中检索出属于同一目标id的车辆运动信息,按时间排序构成轨迹,提取出道路交通感知轨迹数据中的车辆运动信息,作为待评估的道路交通感知轨迹数据tr:
14.tr
n
(t)=[t,x
n
(t),y
n
(t),v
n
(t)]
[0015]
其中,tr
n
(t)为车辆n在t时刻的轨迹数据,x
n
(t)为车辆n在t时刻的横坐标,x
n
(t)为车辆n在t时刻的纵坐标,v
n
(t)为车辆n在t时刻的速度信息;
[0016]
步骤s12、将待评估的道路交通感知轨迹数据划分为有交互关系的道路交通感知轨迹数据集tr
act
和无交互关系的道路交通感知轨迹数据集tr
none
。
[0017]
进一步地,所述步骤s12具体是对道路交通感知轨迹数据集tr中的各条轨迹计算其横纵安全间距内是否有车辆存在,其中,横向安全间距dis
lat
为道路车道宽度;纵向安全间距dis
lon
为:
[0018]
dis
lon
=vt
a
l
[0019]
式中,v为道路限速值,t
a
为驾驶员反应时间,l为安全停车间距;
[0020]
如果任一时刻,横纵安全间距内至少存在一辆车,则将该轨迹划分至有交互关系的道路交通感知轨迹数据集tr
act
;反之,则将该轨迹划分至无交互关系的道路交通感知轨迹数据集tr
none
。
[0021]
进一步地,所述步骤s2具体是针对无交互关系的道路交通感知轨迹数据,计算其轨迹合理性和轨迹波动性共两类评估指标;
[0022]
针对有交互关系的道路交通感知轨迹数据,计算其轨迹合理性、轨迹波动性和轨迹交互异常性共三类评估指标。
[0023]
进一步地,所述轨迹合理性评估指标包括侧向加速度合理性、急动度合理性和速度差异性三项指标,所述轨迹波动性评估指标包括转角波动性、速度波动性和加速度波动性三项指标,所述轨迹交互异常性评估指标包括车辆碰撞时间最小值、车辆碰撞时间波动性、最近车辆距离平均值和最近车辆距离波动性四项指标。
[0024]
进一步地,所述侧向加速度合理性指标具体为:
[0025][0026][0027]
其中,为轨迹y方向在t时刻的加速度,为t时刻的加速度合理性,为一段时间t内的加速度合理性;
[0028]
所述急动度合理性指标具体为:
[0029][0030][0031]
其中,j
n
(t)为轨迹在t时刻的急动度,为t时刻的急动度合理性,为一段时间t内的急动度合理性;
[0032]
所述速度差异性指标具体为:
[0033][0034][0035]
其中,s
′
n
(t)为根据轨迹横纵坐标计算得出的车辆速度,v
n
(t)为轨迹数据中提供的测量速度,δv
n
为速度差异性;
[0036]
所述转角波动性指标具体为:
[0037]
α
n
(t)=d
n
(t δt)
‑
d
n
(t)
[0038][0039][0040][0041][0042]
其中,α
n
(t)为转角,w为评估时间窗,为t时刻车辆的转角α
n
(t)在评估时间窗w内标准差大小,为在t时刻车辆的转角α
n
(t)在评估时间窗内标准差的最小值,即为转角波动性;
[0043]
所述速度波动性具体为:
[0044][0045][0046]
[0047][0048]
其中,v
n
(t)为速度,w为评估时间窗,为t时刻车辆的速度v
n
(t)在评估时间窗w内标准差大小,为在t时刻车辆的速度v
n
(t)在评估时间窗内标准差的最小值,即为速度波动性;
[0049]
所述加速度波动性具体为:
[0050][0051][0052][0053][0054]
其中,a
n
(t)为加速度,w为评估时间窗,为t时刻车辆的加速度a
n
(t)在评估时间窗w内标准差大小,为在t时刻车辆的加速度a
n
(t)在评估时间窗内标准差的最小值,即为加速度波动性;
[0055]
所述车辆碰撞时间最小值具体为:
[0056][0057]
所述车辆碰撞时间波动性具体为:
[0058][0059]
所述最近车辆距离平均值具体为:
[0060][0061]
所述最近车辆距离波动性具体为:
[0062][0063]
其中,ttc
n
(t)为t时刻车辆n的碰撞时间,为t时刻车辆碰撞时间ttc波动性指标计算值,gap
n
(t)为t时刻车辆最小距离,为t时刻车辆最小距离gap波动性指标计算值。
[0064]
进一步地,所述步骤s3具体包括以下步骤:
[0065]
s31、针对无交互关系的道路交通感知轨迹数据集tr
none
,建立自适应融合的质量评估模型m
a
,其中,模型m
a
的输入为轨迹合理性指标以及轨迹波动性指标,通过神经网络进行非线性拟合后,可输出质量评估得分
[0066]
s32、针对有交互关系的道路交通感知轨迹数据集tr
act
,建立自适应融合的质量评估模型m
b
,其中,质量评估模型m
b
由模型m
a
与修正网络组成:将轨迹合理性指标以及轨迹波动性指标输入模型m
a
,输出为质量评估得分再将和轨迹交互异常性指标共同输入修正网络,通过神经网络进行拟合修正后,输出最终质量评估得分
[0067]
进一步地,所述步骤s4具体包括以下步骤:
[0068]
s41、基于道路交通公开的轨迹数据集,筛选出涵盖不同道路场景的轨迹数据,为获得不同质量水平的轨迹样本,向t时刻车辆n轨迹数据的横纵坐标(x
n
(t),y
n
(t))添加高斯噪声,生成模拟横纵坐标(x
′
(t),y
′
(t)),其中,噪声均值为μ,标准差δ∈{0.1m,0.2m,...,1.0m},持续时长t
l
∈{1s,2s,...,5s},通过添加噪声模拟路侧感知设备因不同分布的设备测量误差或遭受不同程度的蓄意攻击而产生的轨迹偏离,以生成不同质量水平的仿真轨迹数据;
[0069]
s42、将仿真轨迹数据划分为无交互关系的仿真轨迹数据集和有交互关系的仿真轨迹数据集;
[0070]
s43、分别计算无交互关系的仿真轨迹数据的质量评估指标a
none
,以及有交互关系的仿真轨迹数据的质量评估指标a
act
;
[0071]
s44、分别计算有、无交互关系的仿真轨迹数据的质量水平q
n
,计算方法为:
[0072][0073]
其中,(x
real
(t),y
real
(t))为t时刻轨迹点的位置真值,(x
n
(t),y
n
(t))为t时刻轨迹点的位置测量值,len(tr
n
)为轨迹的总长度;
[0074]
s45、将无交互关系的仿真轨迹数据的质量评估指标a
none
与质量水平q
n
构成仿真轨迹数据集d
none
的特征与标签;将有交互关系的仿真轨迹数据的质量评估指标与质量水平q
n
构成仿真轨迹数据集d
act
的特征与标签;
[0075]
s46、将仿真轨迹数据集内的数据按照比例划分训练与测试集;
[0076]
s47、利用仿真轨迹数据集d
none
与d
act
的训练集数据训练模型m
a
,当模型m
a
在测试集上预测误差小于时,训练模型结束,保留模型参数;
[0077]
利用仿真轨迹数据集d
act
的训练集数据训练模型m
b
修正网络部分,当模型m
b
在测试集上预测误差小于时,训练模型结束,保留模型参数。
[0078]
进一步地,所述步骤s41中高斯噪音的添加方式为:
[0079][0080]
[0081]
a
i
~g(0,δ
12
)
[0082]
b
i
~g(0,δ
22
)
[0083]
其中,a(t)为t时刻纵坐标添加噪声值大小,b(t)为t时刻横坐标添加噪声值大小,t0为添加噪声的起始时刻,t
l
为添加噪声的持续时长。
[0084]
进一步地,所述步骤s5具体包括以下步骤:
[0085]
s51、在待评估的道路交通感知轨迹数据中,将无交互关系数据集tr
none
中的各条轨迹的质量评估指标,输入训练好的模型m
a
,得到数据集中各轨迹的道路交通感知轨迹数据质量评估结果;
[0086]
s52、在待评估的道路交通感知轨迹数据中,将有交互关系数据集tr
act
中的各条轨迹的质量评估指标,输入训练好的模型m
b
,得到数据集中各轨迹的道路交通感知轨迹数据质量评估结果。
[0087]
与现有技术相比,本发明具有以下优点:
[0088]
一、本发明面向海量道路交通感知轨迹数据,提出了一种自适应融合回归的道路交通感知轨迹数据质量智能评估模型,能够融合多元维度的质量评估指标实现对道路交通感知轨迹数据质量的准确、快速评价,本发明通过采集道路交通感知轨迹数据,并从中提取出有交互关系和无交互关系的待评估轨迹数据,再基于数据的元素特征、时序特征、空间特征等多元评估维度,提出了全面表征数据质量水平的合理性、波动性和交互异常性质量评估指标,由此能够保证对道路交通感知轨迹数据的质量进行准确可靠地评估。
[0089]
二、本发明针对有交互关系的轨迹数据和无交互关系的轨迹数据,分别构建对应的智能评估模型,并基于道路交通公开的轨迹数据集,筛选出涵盖不同道路场景的轨迹数据,同时通过添加高斯噪声,已生成不同质量水平的仿真轨迹数据,从而对构建的两个智能评估模型进行对应训练,保证了智能评估模型能够全面、准确地对待评估轨迹数据进行质量评估。
附图说明
[0090]
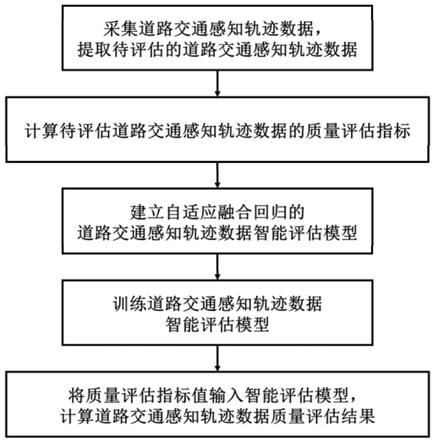
图1为本发明的方法流程示意图;
[0091]
图2为本发明的横纵向安全间距示意图;
[0092]
图3为本发明的轨迹波动性指标计算方法示意图;
[0093]
图4a为自适应融合回归的道路交通感知轨迹数据质量智能评估模型m
a
的结构示意图;
[0094]
图4b为自适应融合回归的道路交通感知轨迹数据质量智能评估模型m
b
的结构示意图;
[0095]
图5为实施例的质量评估结果分布图;
[0096]
图6a为实施例中第一目标车辆轨迹感知数据质量评分结果示意图;
[0097]
图6b为实施例中第二目标车辆轨迹感知数据质量评分结果示意图;
[0098]
图6c为实施例中第三目标车辆轨迹感知数据质量评分结果示意图;
[0099]
图6d为实施例中第四目标车辆轨迹感知数据质量评分结果示意图;
[0100]
图6e为实施例中第五目标车辆轨迹感知数据质量评分结果示意图;
[0101]
图6f为实施例中第六目标车辆轨迹感知数据质量评分结果示意图。
具体实施方式
[0102]
下面结合附图和具体实施例对本发明进行详细说明。
[0103]
实施例
[0104]
如图1所示,一种道路交通感知轨迹数据的质量评估方法,包括以下步骤:
[0105]
步骤s1:从道路上布设的各类感知传感器中采集道路交通感知轨迹数据,从中提取待评估的道路交通感知轨迹数据。将待评估的道路交通感知轨迹数据划分为有交互关系的道路交通感知轨迹数据集和无交互关系的道路交通感知轨迹数据集。
[0106]
步骤s2:计算待评估的道路交通感知轨迹数据的质量评估指标。其中,无交互关系的道路交通感知轨迹数据计算其轨迹合理性、轨迹波动性两类评估指标;有交互关系的道路交通感知轨迹数据计算其轨迹合理性、轨迹波动性、轨迹交互异常性三类评估指标。
[0107]
步骤s3:建立自适应融合回归的道路交通感知轨迹数据质量智能评估模型。
[0108]
步骤s4:构建基于道路交通公开轨迹数据集的仿真轨迹数据集,并基于此训练道路交通感知轨迹数据智能评估模型。
[0109]
步骤s5:将待评估的道路交通感知轨迹数据的质量评估指标值输入道路交通感知轨迹数据智能评估模型,计算道路交通感知轨迹数据质量得分。
[0110]
步骤s1具体包括:
[0111]
步骤s11:从道路上布设的各类感知传感器采集道路交通感知轨迹数据。检索出属于同一目标id的车辆运动信息,按时间排序构成轨迹,各条轨迹构成待评估的道路交通感知轨迹数据集tr。其中车辆n的轨迹数据tr
n
(t)至少包含时间、横坐标、纵坐标和速度信息,表示为:
[0112]
tr
n
(t)=[t,x
n
(t),y
n
(t),v
n
(t)]
[0113]
步骤s12:对道路交通感知轨迹数据集tr中的各条轨迹计算其横纵安全间距内是否有车辆存在。如图2所示,横向安全间距dis
lat
为道路车道宽度;纵向安全间距dis
lon
,纵向安全间距计算方法为:
[0114]
dis
lon
=vt
a
l
[0115]
式中,v为道路限速值,t
a
为驾驶员反应时间,l为安全停车间距。
[0116]
如果任一时刻,横纵安全间距内至少存在一辆车,则将该轨迹划分至有交互关系的道路交通感知轨迹数据集tr
act
;反之,则将该轨迹划分至无交互关系的道路交通感知轨迹数据集tr
none
。
[0117]
步骤s2具体为:
[0118]
s21:分别计算待评估的道路交通感知轨迹数据集中各条轨迹的质量评估指标。其中,无交互关系的道路交通感知轨迹数据,按照步骤s202、步骤s203计算其轨迹合理性、轨迹波动性两类评估指标;有交互关系的道路交通感知轨迹数据,按照步骤s202、步骤s203、步骤s204计算其轨迹合理性、轨迹波动性、轨迹交互异常性三类评估指标。
[0119]
s22:计算轨迹合理性指标。轨迹合理性指标包含侧向加速度合理性、急动度合理性、速度差异性三项指标。各项指标的计算方式如下:
[0120]
1)侧向加速度合理性
[0121][0122][0123]
式中,表示轨迹y方向在t时刻的加速度,表示t时刻的加速度合理性,表示一段时间t内的加速度合理性
[0124]
2)急动度合理性
[0125][0126][0127]
式中,j
n
(t)表示轨迹在t时刻的急动度,表示t时刻的急动度合理性,表示一段时间t内的急动度合理性。
[0128]
3)速度差异性δv
n
:
[0129][0130][0131]
式中,s
′
n
(t)为根据轨迹横纵坐标计算得出的车辆速度,v
n
(t)为轨迹数据中提供的测量速度。
[0132]
s23:计算轨迹波动性指标(如图3所示)。轨迹波动性指标包含转角波动性、速度波动性、加速度波动性三项指标。各项指标的计算方式如下:
[0133]
1)转角波动性
[0134]
α
n
(t)=d
n
(t δt)
‑
d
n
(t)
[0135]
[0136][0137][0138][0139]
式中,α
n
(t)表示转角,w表示评估时间窗,表示t时刻车辆的转角α
n
(t)在评估时间窗w内标准差大小,表示在t时刻车辆的转角α
n
(t)在评估时间窗内标准差的最小值。
[0140]
2)速度波动性
[0141][0142][0143][0144][0145]
式中,v
n
(t)表示速度,w表示评估时间窗,表示t时刻车辆的速度v
n
(t)在评估时间窗w内标准差大小,表示在t时刻车辆的速度v
n
(t)在评估时间窗内标准差的最小值。
[0146]
3)加速度波动性
[0147][0148][0149][0150][0151]
式中,a
n
(t)表示加速度,w表示评估时间窗,表示t时刻车辆的加速度a
n
(t)在评估时间窗w内标准差大小,表示在t时刻车辆的加速度a
n
(t)在评估时间窗内标准差的最小值。
[0152]
s24:计算轨迹交互异常性指标。轨迹交互异常性指标包含车辆碰撞时间最小值、车辆碰撞时间波动性、最近车辆距离平均值、最近车辆距离波动性四项指标。各项指标的计算方式如下:
[0153]
1)车辆碰撞时间最小值
[0154][0155]
2)车辆碰撞时间波动性
[0156][0157]
3)最近车辆距离平均值
[0158][0159]
4)最近车辆距离波动性
[0160][0161]
式中,ttc
n
(t)表示t时刻车辆n的碰撞时间;表示t时刻车辆碰撞时间ttc波动性指标计算值;gap
n
(t)表示t时刻车辆最小距离;表示t时刻车辆最小距离gap波动性指标计算值;t表示轨迹中采样点的个数。
[0162]
步骤s3具体为:
[0163]
步骤s31:建立自适应融合的质量评估模型m
a
。模型m
a
的输入为轨迹合理性指标以及轨迹波动性指标,通过神经网络进行非线性拟合后,可输出质量评估得分
[0164]
对无交互关系的道路交通感知轨迹数据集tr
none
中的各条轨迹,利用模型m
a
进行质量评估,将模型m
a
质量评估得分作为评估结果输出。
[0165]
步骤s32:对有交互关系的道路交通感知轨迹数据集tr
act
,建立自适应融合的质量评估模型m
b
。质量评估模型m
b
由模型m
a
与修正网络组成。
[0166]
首先将轨迹合理性指标以及轨迹波动性指标输入模型m
a
,输出为质量评估得分再将和轨迹交互异常性指标共同输入修正网络,通过神经网络进行拟合修正后,输出最终质量评估得分
[0167]
步骤s4具体为:
[0168]
步骤s41:构建基于道路交通公开轨迹数据集的仿真轨迹数据集。基于道路交通公开的轨迹数据集,筛选出涵盖不同道路场景的轨迹数据。为获得不同质量水平的轨迹样本,向t时刻车辆n轨迹数据的横纵坐标(x
n
(t),y
n
(t))添加高斯噪声,生成模拟横纵坐标(x
′
(t),y
′
(t))。其中,噪声均值为μ,标准差δ∈{0.1m,0.2m,...,1.0m},持续时长t
l
∈{1s,2s,...,5s}。通过添加噪声模拟路侧感知设备因不同分布的设备测量误差或遭受不同程度的蓄意攻击而产生的轨迹偏离,生成了不同质量水平的轨迹,噪声添加方式如下:
[0169][0170][0171]
a
i
~g(0,δ
12
)
[0172]
b
i
~g(0,δ
22
)
[0173]
其中,a(t)为t时刻纵坐标添加噪声值大小,b(t)为t时刻横坐标添加噪声值大小,t0为添加噪声的起始时刻,t
l
为添加噪声的持续时长。
[0174]
步骤s42:重复步骤s1,将仿真轨迹数据划分为无交互关系的仿真轨迹数据集和有交互关系的仿真轨迹数据集。
[0175]
步骤s403:重复步骤s2,分别计算无交互关系的仿真轨迹数据的质量评估指标a
none
,以及有交互关系的仿真轨迹数据的质量评估指标a
act
。
[0176]
步骤s44:分别计算有、无交互关系的仿真轨迹数据的质量水平q
n
,计算方法为:
[0177][0178]
其中,(x
real
(t),y
real
(t))为t时刻轨迹点的位置真值,(x
n
(t),y
n
(t))为t时刻轨迹点的位置测量值,len(tr
n
)为轨迹的总长度。
[0179]
步骤s45:无交互关系的仿真轨迹数据的质量评估指标a
none
与质量水平q
n
构成仿真轨迹数据集d
none
的特征与标签;有交互关系的仿真轨迹数据的质量评估指标与质量水平q
n
构成仿真轨迹数据集d
act
的特征与标签。
[0180]
步骤s46:将仿真轨迹数据集内的数据按照比例划分训练与测试集。
[0181]
利用仿真轨迹数据集d
none
与d
act
的训练集数据训练模型m
a
,当模型在测试集上预测误差小于时,训练模型结束,保留模型参数。
[0182]
利用仿真轨迹数据集d
act
的训练集数据训练模型m
b
修正网络部分,当模型在测试集上预测误差小于时,训练模型结束,保留模型参数。
[0183]
步骤s5具体为:
[0184]
步骤s501:在待评估的道路交通感知轨迹数据中,将无交互关系数据集tr
none
中的各条轨迹的质量评估指标,输入训练所得到的模型m
a
,得到数据集中各轨迹的道路交通感知轨迹数据质量得分。
[0185]
步骤s502:在待评估的道路交通感知轨迹数据中,将有交互关系数据集tr
act
中的各条轨迹的质量评估指标,输入训练所得到的模型m
b
,得到数据集中各轨迹的道路交通感知轨迹数据质量得分。
[0186]
本实施例应用上述技术方案,其主要过程为:
[0187]
步骤s1:从道路上布设的感知传感器中采集道路交通感知轨迹数据,从中提取待评估的道路交通感知轨迹数据。将待评估的道路交通感知轨迹数据划分为有交互关系的道路交通感知轨迹数据集和无交互关系的道路交通感知轨迹数据集。
[0188]
步骤s11:京沪高速硕放枢纽的某出口安装有24ghz的毫米波雷达,对京沪高速硕
放枢纽某出口处安装的路侧毫米波雷达所采集的道路交通感知轨迹数据进行质量评估与分析。
[0189]
道路交通感知轨迹数据由目标id、时间、车辆速度、车辆x坐标、车辆y坐标和车道等字段组成,采集时间区间为2021年1月19日23时至24时整。
[0190]
检索出属于同一目标id的车辆运动信息,按时间排序构成轨迹,共提取出车辆轨迹2333条,各条轨迹构成了待评估的道路交通感知轨迹数据集tr。
[0191]
步骤s12:对待评估的道路交通感知轨迹数据集tr中的轨迹计算其横纵安全间距内是否有车辆存在,将待评估的道路交通感知轨迹数据划分为有交互关系的道路交通感知轨迹数据集tr
act
,共计279条;无交互关系的道路交通感知轨迹数据集tr
none
,共计2054条。
[0192]
步骤s2:计算待评估的道路交通感知轨迹数据的质量评估指标。其中,对于无交互关系的道路交通感知轨迹数据集tr
none
中的各条轨迹,计算轨迹合理性、轨迹波动性共计6个指标;对于有交互关系的道路交通感知轨迹数据tr
none
中的各条轨迹,计算轨迹合理性、轨迹波动、轨迹交互合理性共计10个指标。
[0193]
步骤s3:建立自适应融合回归的道路交通感知轨迹数据质量智能评估模型。
[0194]
步骤s31:建立自适应融合的质量评估模型m
a
,如图4a所示。
[0195]
模型m
a
的输入为轨迹合理性指标所包含侧向加速度合理性急动度合理性速度差异性指标δv
n
,以及轨迹波动性指标所包含转角波动性速度波动性加速度波动性指标通过神经网络进行非线性拟合后,可输出质量评估得分
[0196]
对无交互关系的道路交通感知轨迹数据集tr
none
中的各条轨迹,利用模型m
a
进行质量评估,将模型m
a
质量评估得分作为评估结果输出。
[0197]
步骤s32:对有交互关系的道路交通感知轨迹数据tr
act
,建立自适应融合的质量评估模型m
b
,如图4b所示。质量评估模型m
b
由模型m
a
与修正网络组成。
[0198]
首先将轨迹合理性指标所包含的侧向加速度合理性急动度合理性速度差异性指标δv
n
,以及轨迹波动性指标所包含转角波动性速度波动性加速度波动性指标输入模型m
a
,输出为质量评估得分再将和轨迹交互异常性指标所包含的车辆碰撞时间最小值车辆碰撞时间波动性最近车辆距离平均值最近车辆距离波动性四项指标,共同输入修正网络,通过神经网络进行拟合修正后,输出最终质量评估得分
[0199]
步骤s4:构建基于道路交通公开轨迹数据集的仿真轨迹数据集,并基于此训练道路交通感知轨迹数据智能评估模型。
[0200]
步骤s41:构建基于道路交通公开轨迹数据集的仿真轨迹数据集。以德国highd公开轨迹数据集作为道路交通公开轨迹数据集,共包含约110,000条车辆轨迹记录,来自德国高速公路6个不同地点的轨迹数据。数据集包含数据帧、车辆id、车辆x坐标、车辆y坐标等字段。
[0201]
从中筛选出涵盖不同道路场景的轨迹数据,向车辆轨迹数据的横纵坐标x,y添加均值为0的高斯噪声,噪声标准差δ∈{0.1m,0.2m,...,1.0m},噪声的持续时长t∈{1s,
2s,...,5s},生成不同质量水平的仿真轨迹数据。
[0202]
步骤s42:重复步骤s1,将仿真轨迹数据划分为无交互关系的仿真轨迹数据集和有交互关系的仿真轨迹数据集。
[0203]
步骤s43:重复步骤s2,分别计算无交互关系的仿真轨迹数据的质量评估指标a
none
,以及有交互关系的仿真轨迹数据的质量评估指标a
act
。
[0204]
步骤s44:分别计算有、无交互关系的仿真轨迹数据的质量水平q
n
。
[0205]
步骤s45:无交互关系的仿真轨迹数据的质量评估指标a
none
与质量水平q
n
构成仿真轨迹数据集d
none
的特征与标签;有交互关系的仿真轨迹数据的质量评估指标与质量水平q
n
构成仿真轨迹数据集d
act
的特征与标签;
[0206]
步骤s46:将仿真轨迹数据集的数据按照8:2的比例划分训练与测试集。训练集所包含的数据总计13640条,测试集的数据总计3410条。利用仿真轨迹数据d
none
与d
act
的训练集数据训练模型m
a
,当模型在测试集上预测误差小于1%时,训练模型结束,保留模型参数。
[0207]
利用仿真轨迹数据d
act
的训练集数据训练模型m
b
修正网络部分,当模型在测试集上预测误差小于1%时,训练模型结束,保留模型参数。
[0208]
步骤s5:将待评估的道路交通感知轨迹数据输入道路交通感知轨迹数据质量智能评估模型,计算道路交通感知轨迹数据的质量得分,结果如图5、图6a~图6f所示(在图6a~图6f中,目标车辆轨迹是指被评估质量分值的目标车辆轨迹,周围车辆轨迹则是该被评估的目标车辆周围其他车辆的真实轨迹示意图)。
[0209]
步骤s51:在待评估的道路交通感知轨迹数据中,将无交互关系数据集tr
none
中的各条轨迹的质量评估指标,输入训练所得到的模型m
a
,得到数据集中各轨迹的道路交通感知轨迹数据质量得分。
[0210]
步骤s52:在待评估的道路交通感知轨迹数据中,将有交互关系数据集tr
act
中的各条轨迹的质量评估指标,输入训练所得到的模型m
b
,得到数据集中各轨迹的道路交通感知轨迹数据质量得分。
[0211]
综上可知,本发明为了对海量的道路交通感知轨迹数据质量进行快速、智能的质量评价与监测,提供了一种道路交通感知轨迹数据质量智能评估方法:采集道路交通感知轨迹数据,从中提取待评估的道路交通感知轨迹数据;计算待评估的道路交通感知轨迹数据的质量评估指标;建立自适应融合回归的道路交通感知轨迹数据智能评估模型;构建基于道路交通公开轨迹数据集的仿真轨迹数据集,训练自适应融合回归的道路交通感知轨迹数据质量智能评估模型;将待评估的道路交通感知轨迹数据的质量评估指标值,输入道路交通感知轨迹数据智能评估模型,计算道路交通感知轨迹数据的质量得分。本发明可快速应用于海量感知数据的质量监测与评价,实现对道路交通感知轨迹数据的实时管控,无需额外的硬件成本投入,可节省昂贵的质量监管投资;本发明还可用于对出现异常的道路交通感知轨迹数据进行快速分类与分析,为道路交通感知轨迹数据的清洗工作提供指导,具有理论意义和应用价值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。