1.本公开涉及二次电池单元堆叠装置和包括该装置的制造系统。
背景技术:
2.通常,二次电池是通过将化学能转换为电能的放电过程和反方向上的充电过程而可以重复使用的电池,并且二次电池的类型包括镍镉(ni
‑
cd)电池、镍氢(ni
‑
mh)电池、锂金属电池、锂离子(ni离子)电池、锂离子聚合物电池(下文中称为“lipb”)等。
3.二次电池包括正极、负极、电解质和隔膜,并利用不同的正极材料与负极材料之间的电压差来储存和产生电力。这里,放电是电子从具有高电压的负极移动到具有低电压的正极(产生与正极的电压差一样多的电力),而充电是电子再次从正极移动到负极,并且在这种情况下,正极材料接收电子和锂离子并返回到原始金属氧化物。也就是说,当二次电池被充电时,充电电流随着金属原子从正极通过隔膜移动到负极而流动,相反,当二次电池放电时,放电电流随着金属原子从负极移动到正极而流动。
4.锂二次电池根据电解质的类型一般分为液体电解质电池和聚合物电解质电池,使用液体电解质的电池称为锂离子电池,而使用聚合物电解质的电池称为锂聚合物电池。另外,锂二次电池的外部材料可以形成为各种类型,并且典型的外部材料类型包括圆柱型、棱柱型和袋式。在锂二次电池的外部材料内部,设置了堆叠或缠绕有正极板、负极板和插置它们之间的隔膜的电极组件。
5.具体地,二次电池通常以其中堆叠有至少一个单位电池单元(下文中,“单元”)的电池模块的形式使用。
6.传统的二次电池模块制造设备使用将处于平放位置的多个单元竖直堆叠的方法。然而,该方法的问题在于,随着堆叠高度增加,电池斜向一边。
7.也就是说,为了制作大容量的二次电池,需要增加堆叠厚度,并且纵向截面需要是矩形或正方形。然而,存在的问题在于,在堆叠处理期间,单元斜向一边并且电池的纵向截面变形为平行四边形形状。
技术实现要素:
8.待解决的技术问题
9.本公开的目的是提供在水平方向上堆叠单元的单元堆叠装置和包括该单元堆叠装置的二次电池的制造系统。
10.技术方案
11.根据本公开的实施方式,一种二次电池单元堆叠装置可以包括:多个叉,其用于支撑多个单元中的每个单元的两端以竖直地装载所述多个单元并在第一方向上排列成一行,所述第一方向是水平的;叉导轨,其在所述第一方向上形成得较长,以引导所述多个叉在所述第一方向上移动;堆叠基准部,其设置在所述多个叉的所述第一方向上的一侧;堆叠加压单元,其设置在所述多个叉的所述第一方向上的另一侧;以及堆叠机构,其用于使所述堆叠
加压单元朝向所述堆叠基准部移动。
12.所述二次电池单元堆叠装置还可以包括:多个绝缘块,其设置在所述多个单元的引线之间以防止所述引线之间短路,并在所述第一方向上排列成一行;绝缘块导轨,其形成得较长,以引导所述多个绝缘块在所述第一方向上移动;绝缘块基准部,其设置在所述多个绝缘块的所述第一方向上的一侧;以及绝缘块加压单元,其随所述堆叠加压单元移动,以将所述绝缘块朝向所述绝缘块基准部加压。
13.所述绝缘块加压单元可以包括:加压主体,其用于对所述绝缘块加压;以及加压机构,其用于使所述加压主体在所述第一方向上移动。
14.所述二次电池单元堆叠装置还可以包括:支撑件,其用于支撑通过堆叠所述多个单元而形成的单元块,所述支撑件处于所述单元块的下方;以及升降机构,其用于将所述支撑件升高。
15.所述二次电池单元堆叠装置还可以包括返回单元,所述返回单元用于在从所述支撑件卸载所述单元块时将所述多个叉返回到原始位置。
16.所述返回单元可以包括:第一返回机构,其用于使所述叉导轨和所述多个叉升降;以及第二返回机构,其用于使所述多个叉在所述第一方向上移动。
17.所述二次电池单元堆叠装置还可以包括连杆,所述连杆用于连接所述多个叉,以使所述多个叉之间的间隔同时变化。
18.可以在不同的高度设置有多个叉导轨,并且彼此靠近的一对叉可以连接到不同的叉导轨。
19.多个绝缘块导轨可以在与所述第一方向正交的第二方向上彼此分隔开,所述第二方向是水平的,并且彼此靠近的一对绝缘块可以连接到不同的绝缘块导轨。
20.所述堆叠基准部和所述堆叠加压单元可以包括:加压主体,其用于对容纳在所述叉上的所述单元加压;以及加压机构,其用于使所述加压主体在所述第一方向上移动。
21.根据本公开的实施方式,一种二次电池的制造系统可以包括:转动单元,其用于使水平容纳的单元竖直旋转;传送单元,其用于传送处于竖直状态的由所述转动单元旋转的所述单元;以及堆叠单元,其用于将由所述传送单元传送并竖直设置的多个单元在第一方向上堆叠,所述第一方向是水平的。所述堆叠单元可以包括:多个叉,其用于支撑多个单元中的每个单元的两端,以竖直地装载所述多个单元;叉导轨,其在所述第一方向上形成得较长,以引导所述多个叉在所述第一方向上移动;堆叠基准部,其设置在所述多个叉的所述第一方向上的一侧;堆叠加压单元,其设置在所述多个叉的所述第一方向上的另一侧;以及堆叠机构,其用于使所述堆叠加压单元朝向所述堆叠基准部移动。
22.所述转动单元可以包括:旋转夹具,其在水平状态下容纳所述单元;吸附垫,其设置在所述旋转夹具上并且将所述单元吸附在其上;以及旋转机构,其用于使所述旋转夹具竖直旋转。
23.所述二次电池的制造系统还可以包括用于在所述旋转夹具处容纳所述单元的梭子。所述梭子可以包括:载物台,其上水平容纳所述单元;升降机构,其用于使所述载物台升降;以及移动机构,其用于使所述升降机构和所述载物台在所述第一方向上移动。
24.所述二次电池的制造系统还可以包括用于对准容纳在所述旋转夹具处的所述单元的对准机构。所述对准机构可以包括:第一对准机构,其用于将所述单元在所述第一方向
上对准;以及第二对准机构,其用于将所述单元在与所述第一方向正交的第二方向上对准,所述第二方向是水平的。
25.所述对准机构还可以包括用于使所述第二对准机构在所述第一方向上移动的对准移动机构。
26.所述二次电池的制造系统还可以包括单元块传送单元,所述单元块传送单元用于传送通过用所述堆叠单元堆叠所述多个单元而形成的单元块。所述单元块传送单元可以包括:夹持件,其用于在所述单元块的全宽方向上夹持所述单元块;绝缘主体,其用于防止被所述夹持件夹持并能向上向下移动的所述单元块的引线之间短路;以及位置调整机构,其用于调整所述绝缘主体在所述单元块的全宽方向上的位置。
27.所述二次电池的制造系统还可以包括:容纳夹具,其水平地容纳所述单元;以及喷射单元,其用于将用于堆叠的粘合材料喷射到容纳在所述容纳夹具处的所述单元的上表面。所述梭子可以使被喷射所述粘合材料的所述单元从所述容纳夹具移动到所述旋转夹具。
28.本发明的效果
29.根据本公开的实施方式,可以在水平方向上堆叠由叉竖直支撑的多个单元。因此,与在竖直方向上堆叠单元的方法相比,单元可以可靠地堆叠而不是倾斜。
30.可以通过多个绝缘块来防止多个堆叠单元之间短路。
31.绝缘块加压单元可以随堆叠加压单元在第一方向上移动,并还可以通过加压机构使加压主体在第一方向上移动。因此,可以可靠地对绝缘块加压。
32.可以通过升降机构升高用于支撑通过堆叠多个单元而形成的单元块的支撑件。因此,可以容易地传送单元块。
33.当单元被完全堆叠时,多个叉可以由返回单元返回到原始位置。因此,可以连续地堆叠单元。
34.多个叉可以通过连杆彼此连接,并且多个叉之间的间隔可以同时变化。因此,可以以均匀的压力堆叠多个单元。
35.堆叠基准部和堆叠加压单元可以在第一方向上彼此靠近,并且可以通过加压机构使加压主体在第一方向上移动。因此,可以可靠地对单元加压。
36.传送单元可以将由转动单元竖直旋转的单元传送到堆叠单元。因此,可以容易地竖直装载单元。
37.转动单元可以在水平放置在旋转夹具上的单元被吸附垫吸附的状态下使旋转夹具旋转。因此,单元可以竖直旋转,而不是从旋转夹具落下。
38.可以通过梭子将单元可靠地放置在旋转夹具上。
39.可以通过对准机构将放置在旋转夹具上的单元对准,由此提高制造处理的可靠性。
40.单元块传送单元可以包括绝缘主体。因此,当单元块被传送时,可以通过绝缘主体防止引线之间短路。
41.另外,喷射单元可以将粘合材料喷射到放置在容纳夹具上的单元的上表面。因此,与传统的双面带方法相比,可以简化系统。
附图说明
42.图1是根据本公开的实施方式的二次电池的制造系统的平面图。
43.图2是示出了根据本公开的实施方式的二次电池的制造系统的简单制造序列的流程图。
44.图3是根据本公开的实施方式的供应单元的立体图。
45.图4是根据本公开的实施方式的第一传送单元的立体图。
46.图5是根据本公开的实施方式的主单元的立体图。
47.图6是用于说明根据本公开的实施方式的梭子的示图。
48.图7是用于说明根据本公开的实施方式的对准机构的示图。
49.图8是用于说明根据本公开的实施方式的转动单元的示图。
50.图9是根据本公开的实施方式的喷射单元的立体图。
51.图10是根据本公开的实施方式的第二传送单元的立体图。
52.图11是图10中示出的夹持件的放大视图。
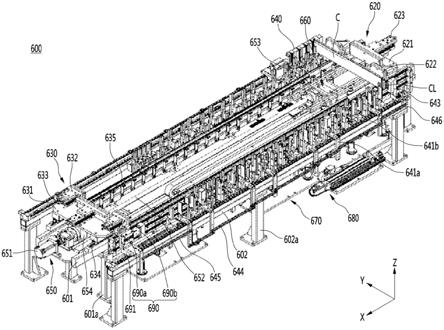
53.图12是根据本公开的实施方式的堆叠单元的立体图。
54.图13是示出了根据本公开的实施方式的多个单元被装载在堆叠单元中的状态的示图。
55.图14是用于说明根据本公开的实施方式的叉的移动的示图。
56.图15是用于说明根据本公开的实施方式的绝缘叉的移动的示图。
57.图16是根据本公开的实施方式的升降机构的立体图。
58.图17是根据本公开的实施方式的返回单元的立体图。
59.图18是根据本公开的实施方式的传感器单元的立体图。
60.图19是用于说明根据本公开的实施方式的堆叠单元的操作的示图。
61.图20是根据本公开的实施方式的第三传送单元的立体图。
62.图21是图20中示出的夹持件的放大视图。
63.图22是在水平方向上观察到的图21中示出的夹持件的示图。
64.图23是根据本公开的实施方式的汇流条组装单元的立体图。
65.图24是用于说明根据本公开的实施方式的夹持单元和子夹持单元的示图。
66.图25是用于说明根据本公开的实施方式的汇流条供应单元的示图。
67.图26是用于说明根据本公开的实施方式的扫描仪和绝缘单元的示图。
68.图27是用于说明根据本公开的实施方式的检查单元的示图。
具体实施方式
69.下文中,将参照附图来详细描述本公开的示例性实施方式。
70.将理解,当一个元件称为“连接到”、“联接到”或“访问”另一个元件时,意味着两个元件直接连接或联接,或者在两个元件之间存在第三个元件并且两个元件通过第三个元件连接或联接。另一方面,当描述一个元件“直接连接”或“直接联接”到另一个元件时,可以理解在两个元件之间不存在第三个元件。
71.另外,相对于下面描述的部件,后缀“装置”和“单元”是考虑到便于描述而描述的,并没有不同的含义。因此,后缀“装置”和“单元”可以能互换地使用。
72.图1是根据本公开的实施方式的二次电池的制造系统的平面图。
73.本说明书中使用的第一方向和第二方向可以是水平方向。第一方向可以是指平行于图1中示出的x轴的方向,并且第二方向可以是指平行于图1中示出的y轴的两个方向。也就是说,第一方向和第二方向可以彼此正交。例如,第一方向可以是前后方向,并且第二方向可以是左右方向。下文中,为了便于描述,“第一方向”被表示为“x”,并且“第二方向”被表示为“y”。
74.根据本公开的实施方式的二次电池的制造系统1(下文中称为“制造系统”)可以包括供应单元100、第一传送单元200、主单元300、喷射单元400、第二传送单元500、堆叠单元600、第三传送单元700和汇流条组装单元800。
75.供应单元100可以是手动或自动接收单元的装置。供应到供应单元100的单元可以包括垫。供应单元100可以是其中供应到主单元300的单元处于待命状态的装置。以下,将参考图3详细描述供应单元100。
76.第一传送单元200可以是用于将供应单元100的单元传送到主单元300的装置。下面,将参考图4来详细描述第一传送单元200。
77.主单元300可以是用于装载单元并竖直旋转单元的装置。以下,将参考图5至图8详细地描述主单元300。
78.喷射单元400可以是用于将预定材料喷射到所装载单元的上表面上的装置。以下,将参考图9详细描述喷射单元400。
79.第二传送单元500可以是用于将在主单元300的作用下竖直旋转的单元传送到堆叠单元600的装置。以下,将参考图10和图11详细地描述第二传送单元500。
80.堆叠单元600可以是用于通过水平堆叠竖直装载的多个单元来形成单元块的装置。以下,将参考图12至图19详细地描述堆叠单元600。
81.第三传送单元700可以是用于将形成在堆叠单元600中的单元块传送到汇流条组装单元800的装置。第三传送单元700可以称为单元块传送单元。以下,将参考图20至图22详细地描述第三传送单元700。
82.汇流条组装单元800可以是用于将汇流条组装到单元块的装置。以下,将参考图23至图27详细地描述汇流条组装单元800。
83.图2是示出了根据本公开的实施方式的二次电池的制造系统的简单制造序列的流程图。
84.根据本实施方式的制造序列可以包括将垫附接到单元的操作(s10)。更详细地,粘合材料可以被喷射在垫的一个表面上并硬化,并且垫可以附接到单元。
85.该制造序列可以包括单元反转和清洁操作(s20)。更详细地,包括垫的单元可以被反转和清洁。被完全执行单元反转和清洁操作(s20)的单元可以被供应到供应单元100。另选地,供应单元100可以执行单元反转和清洁操作(s20)。
86.该制造序列可以包括喷射操作(s30)和硬化操作(s40)。更详细地,可以使用喷射方法在单元上涂覆用于单元间粘附的粘合材料(例如,热熔、水基树脂或uv led固化类型),并使其硬化。因此,与将双面胶带附连到单元的方法相比,可以快速执行操作。
87.喷射操作(s30)和硬化操作(s40)可以由主单元300和喷射单元400执行。更详细地,喷射单元400可以向容纳在主单元300的容纳夹具304(参见图6)处的单元喷射预定材
料,以下将对其进行详细描述。
88.制造序列可以包括竖直旋转单元的操作(s50)。更详细地,被水平容纳的单元可以直立设置,以使单元的两侧水平面对。
89.竖直旋转单元的操作(s50)可以由包括在主单元300中的转动单元330(参照图8)执行。更详细地,旋转机构332可以使容纳有单元的旋转夹具331竖直旋转,以下将对其进行详细描述。
90.该制造序列可以包括堆叠操作s60。更详细地,所述多个单元可以在直立设置的状态下水平堆叠。
91.可以通过堆叠单元600执行堆叠操作s60。更详细地,竖直容纳在多个叉610(参见图19)处的多个单元可以被水平地加压,并堆叠在堆叠基准部620和堆叠加压单元630之间,以下将对其进行详细描述。
92.该制造序列可以包括汇流条组装操作s70和扫描操作s80。更详细地,汇流条可以被组装到通过堆叠多个单元而形成的单元块的两端,并且可以扫描和测量在单元块的全宽方向上的堆叠容差。
93.汇流条组装操作s70和扫描操作s80可以由汇流条组装单元800执行,以下将对其进行详细描述。
94.图3是根据本公开的实施方式的供应单元的立体图。
95.根据本公开的实施方式的供应单元100可包括基板110、容纳单元120、升降机构130和对准机构140。
96.基板110可以水平地设置。容纳单元120可以设置在基板110的上表面上。容纳单元120可以设置为至少一个。
97.容纳单元120可以在其中容纳至少一个单元c。多个单元c可以竖直堆叠并容纳在容纳单元120中。各单元c可以在沿第二方向y纵向和水平地设置的状态下被容纳在容纳单元120中。
98.容纳单元120可以包括彼此分隔开的一对限制单元121、用于在水平方向上支撑单元的支撑单元122以及用于从下面支撑单元c的支撑板123。
99.该一对限制单元121可以在第二方向y上彼此分隔开。每个限制单元121可以在水平方向上限制单元c的端部。然而,限制单元可以形成为具有预定容差,而不是完全限制单元c。
100.每个限制单元121的水平截面可以具有“c”形。由于限制单元121向上敞开,因此单元c可以从限制单元121的上侧排出。
101.支撑单元122可以竖直地设置,并可以形成为在第二方向y上具有预定长度。支撑单元122可以面对该对限制单元121之间的部分。支撑单元122可以在第一方向x上支撑单元c。下面将描述的对准机构140可以朝向支撑单元122向单元c加压。
102.支撑板123可以从下面支撑单元c。支撑板123可以设置在一对限制单元121之间。与单元c一样,支撑板123可以竖直地形成得较长,并可以水平地设置。
103.供支撑板123经过的开口111可以形成在基板110中。下面将描述的升降机构130可以通过开口111升降支撑板123。
104.升降机构130可以升降容纳在容纳单元120中的单元c。更详细地,升降机构130可
以从下面升降支撑板123。也就是说,升降机构130可以设置在基板110的下方。
105.升降机构130可以包括致动器(例如,伺服电机)以及连接到支撑板123的连接机构(例如,1轴笛卡尔坐标机器人)。
106.对准机构140可以对准容纳在容纳单元120中的单元c。更详细地,对准机构140可以对准堆叠在容纳单元120中的多个单元c当中的处于最上端的单元c。
107.对准机构140可以基于第一方向x设置在支撑单元122的相对侧。对准机构140可以将容纳在容纳单元120中的单元c朝向支撑单元加压,因此单元c可以沿着支撑单元122对准。
108.更详细地,对准机构140可以包括诸如驱动缸这样的致动器140、安装有致动器140的安装器141以及连接到致动器140并在第一方向x上移动的加压主体142。
109.安装器141可以设置在基板110的上方。致动器140可以安装在安装器141上,并可以使加压主体142在第一方向x上移动。加压主体142可以在第二方向y上形成得较长,第二方向y是单元c的纵向方向。
110.升降机构130可以调整处于最上端的单元c的高度。另外,可以通过对准机构140对准处于最上端的单元c。因此,第一传送单元200(参照图1)可以可靠地传送处于最上端的单元c。
111.图4是根据本公开的实施方式的第一传送单元的立体图。
112.第一传送单元200可以将堆叠在供应单元100的容纳单元120中的单元c当中的处于最上端的单元c传送到主单元300(参照图1)。
113.第一传送单元200可以是scara机器人。
114.更详细地,第一传送单元200可以包括:基座210;第一臂220,其连接到基座210并绕竖直轴线220a旋转;第二臂230,其连接到第一臂220并绕竖直轴线230a旋转;以及升降杆240,其连接到第二臂230并上下移动;致动器250,其用于使升降杆240升降;以及吸附主体260,其连接到升降杆240的下端并随升降杆240升降。
115.致动器250可以是驱动缸。致动器250可以辅助形成供吸附主体260用于吸附单元c的真空压力。
116.吸附主体260可以在第二方向y上形成得较长。用于吸附单元c的吸附板261可以设置在吸附主体260的下表面上。
117.根据以上配置,本公开所属领域的技术人员可以容易地理解第一传送单元200的操作。
118.图5是根据本公开的实施方式的主单元的立体图。图6是用于说明根据本公开的实施方式的梭子的示图。图7是用于说明根据本公开的实施方式的对准机构的示图。图8是用于说明根据本公开的实施方式的转动单元的示图。
119.主单元300可包括基板301、支腿302、容纳夹具304、梭子310、对准机构320和转动单元330。
120.基板301可以水平地形成。基板301可以由支腿302支撑。供梭子310经过的开口303可以形成在基板301中。
121.容纳夹具304可以设置在基板31的上方。容纳夹具304可以在第二方向y上形成得较长。
122.更详细地,容纳夹具304的至少一部分可以设置在开口303的上方。容纳单元304可以由与基板301的上表面联接的夹具支撑件305支撑。夹具支撑件305可以支撑容纳夹具304的外端。
123.可以在容纳夹具304中形成开口304a(参照图6),下面将描述的载物台311(参照图6)经过开口304a向上和向下。开口304a可以具有防止单元c经过的形状和大小。
124.容纳夹具304可以包括在第二方向y上彼此分隔开的一对夹具主体。夹具主体可以具有形状“c”。开口304a可以包括各夹具主体的内圆周和一对夹具主体之间的间隙。
125.可以设置平行于第一方向x彼此分隔开的多个容纳夹具304。例如,主单元300可以包括一对容纳夹具304。
126.梭子310可以在容纳夹具304处容纳由第一传送单元200传送的单元c。梭子310可以使容纳在容纳夹具304处的单元c向转动单元330的旋转夹具331(参照图8)移动。
127.对准机构320可以对准容纳在容纳夹具304或转动单元330的旋转夹具331处的单元c。
128.转动单元330可以使单元c从水平状态旋转到竖直状态。
129.下文中,将参考图6详细描述梭子310。
130.梭子310可以包括用于容纳单元c的载物台311、用于使载物台311升降的升降机构316以及用于将载物台311在第一方向x上传送的移动机构317。
131.梭子310还可以包括设置在载物台311下方的第一板312、设置在第一板312下方的第二板313以及设置在第二板313下方的第三板315。第一板312、第二板313和第三板315可以水平地设置,并可以在向上方向和向下方向上彼此分隔开。
132.载物台311可以在第二方向y上水平形成得较长,并且单元c可以被容纳在载物台311的上表面上。用于防止单元c偏离的凸缘311a可以设置在载物台311的边缘处。凸缘311a可以从载物台311的上表面向上形成台阶。
133.可以形成至少一个载物台311。例如,一对载物台311可以平行于第一方向x彼此分隔开。
134.载物台311可以由与第一板312的上表面联接的载物台支撑件305支撑。
135.升降机构316可以使第一板312相对于第二板313升降。
136.升降机构316可以包括致动器(例如,驱动缸)以及用于将致动器和第一板312彼此连接的连接杆。连接杆可以使用浮动接头连接到第一板312的下表面。致动器可以联接到第二板313的下表面,并且供连接杆经过的孔可以形成在第二板313中。
137.第一板312和第二板313可以通过多个轴313a和多个衬套314连接。轴313a可以竖直地延伸。衬套314可以固定到第二板313的下表面,并且轴313a可以通过第二板313连接到衬套314。轴313a可以相对于衬套314升降,并且第一板312可以随轴313a升降。
138.第三板315可以使用支撑轴315a连接到第二板313。第三板315可以设置在升降机构316的下方。
139.移动机构317可以将第三板315在第一方向x上传送。移动机构317可以包括致动器(例如,无杆气缸)以及用于引导第三板315的移动的导轨。
140.下文中,将描述梭子310的操作。
141.第一传送单元200可以将单元c容纳在设置在容纳夹具304上方的载物台311上。然
后,当通过升降机构316经由容纳夹具304的开口304a降低载物台311时,单元c可以被容纳在容纳夹具304的上表面上。
142.另一方面,可以通过升降机构316将载物台311从容纳夹具304的下侧经由开口304a上升。因此,容纳在容纳夹具304处的单元c可以被容纳在载物台311上。然后,可以通过移动机构317使载物台311在第一方向x上移动。在这种情况下,载物台支撑件312a可以在包括在容纳夹具304中的一对夹具主体之间经过。
143.然后,梭子310可以在水平状态下将单元c容纳在旋转夹具331(参照图8)处。通过梭子310将单元c容纳在旋转夹具331处的方法可以与将单元c容纳在容纳夹具304处的方法相同。
144.下文中,将参考图7详细描述对准机构320。
145.对准机构320可以设置在基板301的上方。对准机构320可以对准在第二方向y上水平较长地容纳在容纳夹具304或旋转夹具331(参照图8)处的单元c。
146.对准机构320可以包括用于将单元c在第一方向x上对准的第一对准机构321以及用于将单元c在第二方向y上对准的第二对准机构322。对准机构320还可以包括用于将第二对准机构322在第一方向x上传送的对准移动机构323。
147.第一对准机构321可以包括致动器321a以及用于在致动器321a的作用下在第一方向x上移动的同时推动单元c的推动器321b。致动器321a可以是驱动缸。
148.可以针对夹具304和331中的每个设置一对第一对准机构321。该一对第一对准机构321可以在第二方向y上彼此分隔开。该一对第一对准机构321中的任一个可以对准单元c的一端,而另一个第一对准机构321可以对准单元c的另一端。
149.第二对准机构322可以包括致动器322a以及用于在致动器322a的作用下在第二方向y上移动的同时推动单元c的推动器322b。致动器322a可以是驱动缸。
150.可以针对夹具304和331中的每个设置两对第二对准机构322。该两对第二对准机构322中的任一对可以设置在夹具304和331的一侧,而另一对可以设置在夹具304和331的另一侧。
151.对准移动机构323可以包括致动器(例如,驱动缸)以及用于通过致动器引导第二对准机构322的移动的导轨。
152.可以针对夹具304和331中的每个设置一对对准移动机构323。该一对对准移动机构323中的任一个可以使设置在夹具304和331一侧的一对第二对准机构322在第一方向上移动,并可以使设置在夹具304和331另一侧的一对第二对准机构322在第一方向上移动。
153.对准移动机构323可以切换第二对准机构322以对准单元c的两端。也就是说,设置在夹具304和331一侧的一对第二对准机构322中的任一个可以对准单元c的一端,并且设置在夹具304和331另一侧的一对第二对准机构322中的任一个可以对准单元c的另一端。
154.下文中,将参考图8详细描述转动单元330。
155.可以设置平行于第一方向x彼此分隔开的多个转动单元330。例如,主单元300可以包括一对转动单元330。
156.转动单元330可以包括旋转夹具331以及用于使旋转夹具331旋转的旋转机构332。
157.旋转夹具331可以设置在基板31的上方。容纳夹具304可以在第二方向y上形成得较长。更详细地,旋转夹具331的至少一部分可以设置在开口303的上方。
158.可以在旋转夹具331中形成开口331a,梭子310的载物台311(参照图6)经过开口331a向上和向下。开口331a可以具有防止单元c经过的形状和大小。
159.旋转夹具331可以包括在第二方向y上彼此分隔开的一对夹具主体。夹具主体可以具有形状“c”。开口331a可以包括各夹具主体的内圆周和一对夹具主体之间的间隙。
160.可以通过下面将描述的旋转机构332使旋转夹具331绕第二方向y的旋转轴旋转。更详细地,旋转夹具331可以在水平状态与竖直状态之间旋转。
161.用于防止单元c偏离的凸缘311a可以设置在旋转夹具331处。基于旋转夹具331水平设置的状态,凸缘331b可以从旋转夹具331的边缘向上突出。当旋转夹具331旋转到竖直状态时,凸缘331b可以设置在单元c的下方,以防止单元c在竖直状态下从旋转夹具331落下。
162.旋转夹具331可以包括用于吸附单元c的吸附板331c。吸附板331c可以是真空垫。当旋转夹具331处于水平状态时,吸附板331c可以从下面吸附单元c。因此,即使旋转夹具331竖直旋转,单元c也可以不偏离旋转夹具331,并可以随旋转夹具331竖直旋转。
163.旋转机构332可以使旋转夹具331竖直旋转。旋转机构332可以连接到旋转夹具331的两端。
164.旋转机构332可以包括致动器332a、在致动器332a的作用下在第一方向x上移动的动力传送单元332b、随动力传送单元332b在第一方向x上移动的移动主体332c、联接到移动主体332c的齿条332d以及与齿条332d接合并连接到旋转夹具331的小齿轮332e。
165.致动器332a可以是驱动缸。致动器332a可以安装在基板301上。
166.动力传送单元332b可以在第二方向y上形成得较长,并可以在第一方向x上移动。致动器332a可以连接到动力传送单元332b的中心部分。
167.移动主体332c可以像在第一方向x上形成得较长的面板一样地成形。一对移动主体332c可以平行于第二方向y彼此分隔开。该一对移动主体332c可以联接到动力传送单元332b的两端。也就是说,该一对移动主体332c可以随动力传送单元332b在第一方向x上移动。
168.在第一方向上形成得较长的延伸杆333可以连接到移动主体332c,并且延伸杆333可以由安装在基板301的上表面上的支撑件333a可移动地支撑。因此,移动主体332c可以保持在与基板301的上方分隔开的状态下,并可以在第一方向x上平滑地移动。
169.齿条332d可以在第一方向x上形成得较长,并可以联接到移动主体332c的上表面。小齿轮332e可以在齿条332d上方与齿条332d接合。因此,当齿条332d随移动主体332c在第一方向x上移动时,小齿轮332e可以旋转。
170.联接到各移动主体332c的齿条332d可以一体地形成,或者在第一方向x上彼此分隔开的多个齿条332d可以分隔开。
171.可以针对各旋转夹具331设置一对小齿轮332e。该一对小齿轮332e可以连接到旋转夹具331的两端。
172.更详细地,连接主体335可以联接到旋转夹具331的两端,并且小齿轮332e的旋转轴可以通过支撑件334连接到连接主体335。
173.支撑件334可以固定到基板301的上表面。支撑件334可以可旋转地支撑小齿轮332e的旋转轴。
174.连接主体335可以联接到旋转夹具331的下表面。单元c可以在连接主体335的作用下竖直旋转,而不妨碍支撑件334。
175.因此,使用单个致动器332a使多个旋转夹具331同时旋转可以是有利的。
176.下文中,将描述转动单元330的操作。
177.下面将描述的喷射单元400(参照图9)可以向容纳在容纳夹具304处的单元c喷射预定材料,并且梭子310(参照图10)可以将完成材料喷射的单元c在水平状态下容纳在旋转夹具331处。
178.然后,旋转机构332可以使旋转夹具331竖直旋转。单元c可以在凸缘331b和吸附板331c的作用下竖直旋转,而没有偏离旋转夹具331。因此,下面将描述的第二传送单元500(参照图10)可以将单元c传送到竖直状态。
179.图9是根据本公开的实施方式的喷射单元的立体图。
180.喷射单元400可以将预定材料喷射到容纳在主单元300的容纳夹具304处的单元c的上表面。
181.更详细,喷射单元400可包括喷射主体410、安装有喷射主体410的安装板420、悬挂和支撑有安装板420的型材430以及用于将型材430在第二方向y上传送的移动机构440。
182.喷射主体410可以将预定材料向下喷射。喷雾主体410可以设置在主单元300的容纳夹具304(参照图5)的上方。
183.多个喷射主体410可以被设置为对应于容纳夹具304。例如,一对喷射主体410可以在第一方向x上彼此分隔开。
184.安装板420可以竖直地设置。多个安装板420可以被设置为对应于多个喷射主体410。
185.可以在安装板420中形成长孔421,长孔421上下形成得较长并且喷射主体410将联接到长孔421。因此,操作者可以容易地设置喷射主体410的安装高度。
186.型材430可以在第一方向x上形成得较长。安装板420可以通过诸如螺栓和螺母这样的联接构件(未示出)联接到型材430。
187.操作者可以相对于第一方向x设置连接到型材430的安装板420的位置。也就是说,操作者可以容易地设置第一方向x上的多个喷射主体410之间的距离。
188.移动机构440可以连接到型材430的端部,并可以使型材430在平行于单元c的纵向方向的第二方向y上移动。
189.移动机构440可以由支腿441支撑。
190.移动机构440可以包括致动器(例如,伺服电机)以及连接到型材430的连接机构(例如,1轴笛卡尔坐标机器人)。
191.因此,喷射主体410可以将预定材料喷射到单元c的上侧,并可以随型材430在第二方向y上移动。因此,材料可以被喷射到在第二方向y上容纳得较长的单元c的上表面。
192.图10是根据本公开的实施方式的第二传送单元的立体图。图11是图10中示出的夹持件的放大视图。
193.第二传送单元500可以将处于被主单元300的旋转夹具331(参照图8)竖直吸附的状态下的单元c传送到堆叠单元600(参照图12)。
194.第二传送单元500可以包括夹持件510以及用于传送夹持件510的移动机构520、
530和540。
195.例如,移动机构520、530和540可以各自是3轴笛卡尔坐标机器人。
196.更详细地,移动机构520、530和540可以包括用于使夹持件510升降的升降机构520、用于将夹持件510在第一方向x上传送的第一移动机构530以及用于将夹持件510在第二方向y上传送的第二移动机构540。
197.升降机构520可以包括致动器(例如,伺服电机)以及连接到夹持件510并上下形成得较长的连接机构(例如,z轴笛卡尔坐标机器人)。
198.第一移动机构530可以包括致动器(例如,伺服电机)以及连接到升降机构520并在第一方向x上形成得较长的连接机构(例如,x轴笛卡尔坐标机器人)。
199.第二移动机构540可以包括致动器(例如,伺服电机)以及连接到第一移动机构530的连接机构(例如,y轴笛卡尔坐标机器人)。第二移动机构540可以由支腿541支撑。
200.可以设置连接到第一移动机构530两侧的一对第二移动机构540。
201.夹持件510可以夹持竖直状态的至少一个单元c。
202.更详细地,夹持件510可以包括水平面板511、固定到水平面板511的下表面的固定夹持件主体513、在第一方向x上面对固定夹持件主体513的移动夹持件主体512以及用于将移动夹持件主体512在第一方向x上传送的夹持机构515、516和517。
203.水平面板511可以通过具有适当“l”形状的连接框架518连接到升降机构520。
204.单元c可以被夹持在固定夹持件主体513和移动夹持件主体512之间。可以在固定夹持件主体513和移动夹持件主体512的相应相对表面上设置用于将单元c稳定地夹持而不打滑的摩擦构件。
205.固定夹持件主体513和移动夹持件主体512中的至少一者可以包括用于防止单元c落下的凸缘514。凸缘514可以支撑处于竖直状态的单元c的下端。
206.固定夹持件主体513和移动夹持件主体512可以各自设置为多个。具体地,固定夹持件主体513的数量和移动夹持件主体512的数量可以与主单元300的旋转夹具331(参照图8)的数量相同。因此,夹持件510可以共同地夹持多个单元c。
207.夹持机构515、516和517可以通过调整固定夹持件主体513和移动夹持件主体512之间的距离来夹持或释放单元c。
208.更详细地,夹持机构515、516和517可以包括与移动夹持件主体512连接的连接主体515、用于将连接主体515向第一方向x传送的致动器516以及用于引导连接主体515移动的导轨517。
209.连接主体515可以设置在水平面板511的上方。开口511a可以穿过水平面板511竖直地形成,并且移动夹持件主体512可以穿过开口511a连接到连接主体515。
210.致动器516可以是驱动缸。致动器516可以安装在水平面板511的上表面上。
211.导轨517可以安装在水平面板511的上表面上。导轨517可以在第一方向x上形成得较长。
212.可以设置在第二方向y上彼此分隔开的一对导轨517。该一对导轨517可以设置在基于开口511a的相对两侧。连接主体515的两侧可以连接到一对导轨517。致动器516可以设置在一对导轨517之间。
213.图12是根据本公开的实施方式的堆叠单元的立体图。图13是示出了根据本公开的
实施方式的多个单元被装载在堆叠单元中的状态的示图。图14是用于说明根据本公开的实施方式的叉的移动的示图。图15是用于说明根据本公开的实施方式的绝缘叉的移动的示图。图16是根据本公开的实施方式的升降机构的立体图。图17是根据本公开的实施方式的返回单元的立体图。图18是根据本公开的实施方式的传感器单元的立体图。
214.堆叠单元600可以称为单元堆叠装置。
215.堆叠单元600可以包括竖直装载有单元c的多个叉610、基于第一方向x设置在多个叉610一侧的堆叠基准部620、基于多个叉610设置在堆叠基准部620相对侧的堆叠加压单元630以及用于将堆叠加压单元630朝向堆叠基准部620传送的堆叠机构650。
216.叉610可以是夹具。叉610可以在第一方向x上移动。叉610可以具有向上敞开的形状“u”。多个叉610可以被设置为两行。
217.叉610可以支撑单元c的两端。更详细地,多个叉610当中的在第二方向y上彼此分隔开的一对叉610可以支撑单元c的两端。
218.单元c可以在第二方向y上在叉610中竖直装载得较长。更详细地,第二传送单元500(参照图10)可以传送处于竖直状态的单元c,并可以将单元c装载到叉610上。装载在叉610上的单元c的电极引线(下文中“cl”)可以从叉610突出。
219.如图13中所示,多个单元c可以装载在多个叉610上,并可以基于第一方向x彼此面对。在该状态下,当堆叠加压单元630将多个单元c朝向堆叠基准部620加压时,随着多个叉610之间的距离的减小,可以堆叠多个单元c。通过喷射单元400(参照图9)将用于粘附在单元c之间的材料喷射到各单元c上,因此可以平滑地堆叠多个单元c。
220.参照图14,堆叠单元600可以包括用于引导叉610在第一方向x上移动的叉导轨613。更详细地,竖直杆611可以连接到各叉610的下端,并且沿着叉导轨613在第一方向x上移动的移动主体612可以联接到竖直杆611。
221.叉导轨613可以在第一方向x上延伸得较长。叉导轨613可以联接到叉支撑框架614的侧表面。叉支撑框架614可以由下面将描述的返回单元670(参照图17)支撑。
222.多个叉导轨613可以设置在不同的高度。
223.彼此靠近的一对叉610可以连接到不同的叉导轨613。更详细地,与彼此靠近的竖直杆611联接的移动主体612可以连接到具有不同高度的叉导轨613。因此,移动主体612之间不会出现干扰,因此可以容易地堆叠单元c。
224.多个竖直杆611可以通过连杆615彼此连接。连杆615可以是多连杆,但不限于此。可以由连杆615同时变化多个叉610之间的距离。因此,可以均匀地堆叠多个单元c。可以通过下面将描述的返回单元670(参照图17)同时增加多个叉610之间的距离。
225.回头参照图12,堆叠基准部620和堆叠加压单元630可以由主支撑框架601和支腿601a支撑。
226.堆叠基准部620和堆叠加压单元630可以包括水平面板621和631、设置在水平面板621和631上方并对单元c加压的加压主体622和632、以及用于将加压主体622和632在第一方向x上传送的加压机构623和633。
227.加压主体622和632可以被朝向第一方向x引导。堆叠基准部620的加压主体622和堆叠加压单元630的加压主体632可以彼此面对。
228.加压主体622和632可以面对多个叉610之间的部分。当堆叠多个单元c时,加压主
体622和632可以将单元c在第一方向x上加压。
229.堆叠基准部620和堆叠加压单元630中的每者可以包括多个加压主体622和632。例如,堆叠基准部620和堆叠加压单元630的各加压主体622和632可以包括用于对单元c的中心加压的中心主体以及用于对单元c的两端加压的一对侧主体。然而,本公开不限于此。
230.加压机构623和633可以包括致动器(例如,驱动缸)。加压机构623和633可以安装在水平面板621和631的上表面上。
231.堆叠基准部620和堆叠加压单元630中的每者可以包括多个加压机构623和633。例如,堆叠基准部620和堆叠加压单元630中的每者可以包括用于独立地传送中心主体和一对侧主体的三个加压机构623和633。
232.堆叠机构650可以将堆叠加压单元630在第一方向x上传送。
233.堆叠机构650可以包括致动器651和滚珠丝杠652。
234.致动器651可以是伺服电机。致动器651可以安装在主支撑框架601上并由其支撑。
235.滚珠丝杠652可以在第一方向x上形成得较长。滚珠丝杠652的一端可以连接到致动器651,而另一端可以连接到螺杆支撑单元653。螺杆支撑单元653可以安装在下面将要描述的升降机构660(参照图16)的水平板661上。
236.连接主体654可以联接到堆叠加压单元630,更详细地,连接到堆叠加压单元630的水平面板631的下表面,并且连接主体654可以随滚珠丝杠652的旋转在第一方向x上移动。因此,堆叠机构650可以将堆叠加压单元630在第一方向x上传送。
237.堆叠单元600可以包括用于引导堆叠加压单元630移动的导轨635。导轨635可以在主支撑框架601上方在第一方向x上设置得较长。
238.一对导轨635可以平行于第二方向y彼此分隔开。一对引导主体634可以联接到堆叠加压单元630,更详细地,联接到堆叠加压单元630的水平面板631的下表面。该一对引导主体634可以设置在基于连接主体654的相对两侧。该一对引导主体634可以随堆叠加压单元630沿着一对导轨635在第一方向x上移动。
239.堆叠单元600还可以包括用于防止多个单元c的引线cl之间短路的多个绝缘块640、基于第一方向x设置在多个绝缘块的一侧的绝缘块基准部643以及基于多个绝缘块640设置在绝缘块基准部643的相对侧的绝缘块加压单元690。
240.绝缘块640可以在第一方向x上移动。可以设置布置为两行的多个绝缘块640。绝缘块640可以设置在叉610的外部。
241.绝缘块640中的每者可以设置在任一个单元c的引线cl和另一个单元c的引线cl之间。因此,绝缘块640可以防止引线cl之间短路。
242.参照图15,堆叠单元600可以包括用于引导绝缘块640相对于第一方向x移动的绝缘块导轨642。更详细地,沿着绝缘块导轨642在第一方向x上移动的联接主体641可以联接到各绝缘块640。
243.绝缘块导轨642可以在第一方向x上延伸得较长。绝缘块导轨642可以联接到绝缘块支撑框架602(参照图12)的上表面。也就是说,多个绝缘块640可以由绝缘块支撑框架602和支腿602a支撑。
244.可以设置在第二方向y上彼此分隔开的多个绝缘块导轨642。
245.彼此靠近的一对绝缘块640可以连接到不同的绝缘块导轨642。更详细地,与彼此
靠近的绝缘块640联接的联接主体641可以连接到彼此分隔开的各绝缘块导轨642。
246.回头参照图12,多个联接主体641可以包括连接到连杆644、645和646的第一类型联接主体641a以及未连接到连杆644、645和646的第二类型联接主体641b。
247.多个连杆644、645和646可以是多连杆,但本公开不限于此。与第一类型联接主体641a联接的多个绝缘块640之间的距离可以通过连杆644、645和646同时变化。
248.多个连杆644、645和646可以包括用于将多个第一类型联接主体641a彼此连接的第一连杆644、用于将一个第一类型联接主体641a和绝缘块加压单元690连接的第二连杆645、以及用于将另一第一类型联接主体641a和绝缘块基准部643连接的第三连杆646。
249.绝缘块基准部643可以固定到绝缘块支撑框架602。绝缘块基准部643可以与堆叠基准部620相邻地设置。
250.绝缘块加压单元690可以连接到堆叠加压单元630。因此,绝缘块加压单元690可以随堆叠加压单元630在第一方向x上移动。沿着绝缘块导轨642(参照图15)移动的引导块691可以连接到绝缘块加压单元690。因此,绝缘块加压单元690可以将多个绝缘块640朝向绝缘块基准部643加压。
251.更详细地,绝缘块加压单元690可以包括加压机构690a以及由加压机构690a在第一方向x上移动以对绝缘块640加压的加压主体690b。加压机构690a可以包括致动器(例如,驱动缸)。
252.因此,绝缘块加压单元690可以更可靠地对绝缘块640加压。
253.堆叠单元600还可以包括用于抬高通过堆叠多个单元c而形成的单元块cb(参照图19)的升降机构660。
254.升降机构660可以设置在堆叠基准部620和堆叠加压单元630之中的与堆叠基准部620更相邻处。升降机构660可以设置在装载在叉610上的单元c下方。
255.参照图16,升降机构660可以包括水平板661、用于从下面支撑单元块cb的支撑件662以及用于使支撑件662升降的升降机构664。
256.水平板661可以由主支撑框架601支撑。
257.支撑件663可以设置在水平板661的上方。支撑件663可以在通过连接装置665连接到水平板661的状态下升降。例如,连接装置665可以包括联接到水平板661的上表面的衬套以及连接到支撑件662的下表面并插入衬套中的轴。
258.用于容纳单元块cb的容纳单元663可以安装在支撑件663的上表面上。
259.升降机构664可以包括致动器(例如,驱动缸)。升降机构664可以安装在水平板661的上表面上。升降机构664可以连接到支撑件662的下表面,并可以使支撑件662相对于水平板661升降。
260.堆叠单元600还可以包括返回单元670,返回单元670用于在从升降机构660的支撑件662卸载单元块cb时将多个叉610返回到原始位置。
261.参照图17,返回单元670可以包括基板671、由基板671升降的升降框架672、用于使升降框架672升降的第一返回机构674以及用于使多个叉610在第一方向x上移动的第二返回机构676。
262.基板671可以水平地设置。基板671可以一体地形成,或者可以包括彼此分离的多个板。
263.升降机构672可以设置在基板671的上方。可以通过多个升降引导件673使升降框架672在连接到基板671的状态下升降。例如,每个升降引导件673可以包括连接到基板671的上表面的衬套和连接到升降框架672的下表面并插入衬套中的轴。
264.以上提到的叉支撑框架614(参照图14)可以由升降框架672支撑。也就是说,叉支撑框架614和叉610可以随着升降框架672升降。
265.第一返回机构674可以安装在基板671的上表面上,并可以使升降框架672从升降框架672的下侧升降。第一返回机构674可以包括致动器(例如,驱动缸)。可以设置多个第一返回机构674,并且升降框架672的整个部分可以被稳定地升降。
266.第二返回机构675可以安装在基板上。第二返回机构675可以在第一方向x上设置得较长。
267.第二返回机构675可以通过连接框架(未示出)连接到多个竖直杆611(参照图14)。连接框架可以连接到第二返回机构676,并可以通过轨道675引导在第一方向x上移动,轨道675在第一方向x上在升降框架672的上表面上设置得较长。因此,第二返回机构675可以使多个叉610在第一方向x上移动。
268.第二返回机构675可以包括致动器(例如,伺服电机)和用于将致动器的动力传送到连接框架的动力传送装置(例如,1轴笛卡尔坐标机器人)。
269.堆叠单元600还可以包括用于检测叉610的位置的传感器单元680。传感器单元680可以设置在返回单元670的一侧。传感器单元680可以设置在叉610和绝缘块640的下方。
270.参照图18,传感器单元680可以包括传感器681、与传感器681联接的支架682以及用于使支架682在第一方向x上移动的移动机构683。传感器单元680还可以包括安装有移动机构683的安装板684。
271.传感器681可以设置在叉610的下方。传感器681可以随支架682在第一方向x上移动。因此,传感器681可以检测在第一方向x上排列成行的多个叉610的位置。
272.移动机构683可以安装在水平设置的安装板684的上表面上。移动机构683可以包括致动器(例如,伺服电机)以及连接到支架862的连接机构(例如,1轴笛卡尔坐标机器人)。
273.图19是用于说明根据本公开的实施方式的堆叠单元的操作的示图。
274.下文中,将简要描述堆叠单元600的操作。
275.如图19的(a)中所示,单元c可以在竖直状态下装载在多个叉610中的每个上,该多个叉610在第一方向x上彼此分隔开。
276.然后,如图19的(b)中所示,堆叠加压单元630可以朝向堆叠基准部620移动,并且多个叉610和装载在其上的多个单元c可以朝向堆叠基准部620移动。因此,多个单元c可以堆叠在堆叠加压单元630和堆叠基准部620之间,以形成单元块cb。
277.然后,如图19的(c)中所示,用于支撑单元块cb的升降机构660可以被升起,并且第三传送单元700可以传送放置在升降机构660上的单元块cb。返回单元670可以降低多个叉610。
278.然后,如图19的(d)中所示,堆叠加压单元630可以在远离堆叠基准部620的方向上移动,并可以返回到初始位置。返回单元670可以将多个叉610以原始间隔返回。因此,可以重复执行以上提到的处理。
279.图20是根据本公开的实施方式的第三传送单元的立体图。图21是图20中示出的夹
持件的放大视图。图22是在水平方向上观察到的图21中示出的夹持件的示图。
280.第三传送单元700可以将放置在堆叠单元600的升降机构660上的单元块cb传送到汇流条组装单元800。
281.第三传送单元700可以包括夹持件710以及用于移动夹持件710的移动机构730和740。
282.例如,移动机构730和740可以是2轴笛卡尔坐标机器人。
283.更详细地,移动机构730和740可以包括用于升降夹持件710的升降机构730以及用于使夹持件710在第一方向x上移动的水平移动机构740。
284.升降机构730可以包括致动器(例如,伺服电机)以及连接到夹持件710并上下形成得较长的连接机构(例如,z轴笛卡尔坐标机器人)。
285.水平移动机构740可以包括致动器(例如,伺服电机)以及连接到升降机构730并在第一方向x上形成得较长的连接机构(例如,x轴笛卡尔坐标机器人)。水平移动机构740可以由支腿742支撑。
286.夹持件710可以夹持单元块cb。
287.更详细地,夹持件710可以包括水平面板711、设置在水平面板711两侧的一对夹持主体713以及用于调整一对夹持主体713之间距离的夹持机构712。
288.水平面板711可以通过连接框架717连接到升降机构730。
289.一对夹持主体713可以朝向水平面板711的下侧突出,并可以在第一方向x上彼此分隔开。因此,在第二方向y上设置得较长的单元块cb的两个表面可以被夹持在一对夹持主体713之间。在这种情况下,单元块cb可以设置在水平面板711的下方。
290.用于稳定地夹持单元块cb而不打滑的摩擦构件可以设置在各夹持主体713的相对表面上。用于防止单元块cb落下的凸缘可以设置在一对夹持主体713中的至少较低一个的下端处。凸缘可以由单元块cb从下面支撑。
291.夹持机构712可以包括致动器(例如,驱动缸)。夹持机构712可以连接到一对夹持主体713中的至少一个。
292.夹持件710还可以包括设置在水平面板711下方的下面板714以及用于使下面板714相对于水平面板711在第一方向x上移动的辅助机构715和716。
293.下面板714可以水平设置在水平面板711的下方。一对夹持主体713可以朝向下面板714的下侧突出,并且由一对夹持主体713夹持的单元块cb可以设置在下面板714的下方。
294.辅助机构715和716可以设置在下面板714和水平面板711之间。辅助机构714和715可以使水平面板711、安装在其上的夹持机构712和一对夹持主体713相对于下面板714在第一方向x上移动。
295.更详细地,辅助机构715和716可以包括致动器(例如,驱动缸)、联接到水平面板711的下表面并在第一方向x上形成得较长的导轨716以及联接到下面板714的上表面并沿着导轨716移动的滑动件715。
296.夹持件710还可以包括能在向上方向和向下方向上移动并防止单元块cb的多条引线cl之间短路的绝缘主体720以及用于使绝缘主体720在第二方向y上移动的位置调整机构724。
297.可以设置在第二方向y上彼此分隔开的一对绝缘主体720。该一对绝缘主体720可
以防止设置在单元块cb两端处的引线cl之间短路。
298.供引线cl插入的多个狭槽720a可以形成在绝缘主体720中。当绝缘主体720由于自负载而朝向引线cl降低时,引线cl可以插入狭槽720中。
299.绝缘主体720可以朝向水平面板711的下侧突出。绝缘主体720可以联接到与水平面板711相比向上突出的竖直板721的下侧。竖直板721可以随绝缘主体720升降。
300.绝缘主体720可以被随意安装,以能在外力的作用下移动。连接到下面将更详细描述的位置调整机构724的连接主体723可以包括升降引导件723,并且沿着升降引导件723向上和向下引导的竖直轨道722可以设置在与绝缘主体720联接的竖直板721的内表面上。
301.当夹持件710被降低以夹持放置在主单元600的升降机构660(参照图12)上的单元块cb时,可以通过主单元600的绝缘块640对绝缘主体720向上加压。当夹持件710在夹持单元块cb的状态下被升高时,绝缘主体720可以因自负载而降低,以将单元块cb的引线cl插入绝缘主体720的狭槽720a中。
302.位置调整机构724可以安装在水平板711的上表面上。位置调整机构724可以包括致动器(例如,驱动缸)。位置调整机构724可以通过连接主体723连接到竖直板721。
303.可以设置用于使一对绝缘主体720在第二方向y上移动的一对位置调整机构724。该一对位置调整机构724可以安装在水平面板711的上表面的与两端相邻的那部分处。
304.因此,可以根据单元块cb的夹持位置而可变地调整各绝缘主体720相对于第二方向y的位置。
305.图23是根据本公开的实施方式的汇流条组装单元的立体图。图24是用于说明根据本公开的实施方式的夹持单元和子夹持单元的示图。图25是用于说明根据本公开的实施方式的汇流条供应单元的示图。图26是用于说明根据本公开的实施方式的扫描仪和绝缘单元的示图。图27是用于说明根据本公开的实施方式的检查单元的示图。
306.汇流条组装单元800可以将汇流条bb(参照图25)组装在由第三传送单元700传送的单元块cb上。
307.汇流条组装单元800可以包括用于固定单元块cb的固定单元810、用于夹持组装到单元块cb的汇流条bb的夹持单元820、用于将汇流条bb组装到单元块cb的组装单元830、用于测量单元块cb的堆叠容差的扫描单元840以及用于检查汇流条bb是否适当组装的视觉单元860。汇流条组装单元800还可以包括用于防止单元块cb之间短路的绝缘单元850(参照图26)。
308.下文中,参考图24,将详细描述固定单元810和夹持单元820。
309.固定单元810可以包括在第一方向x上彼此分隔开的一对固定主体811、用于使固定主体811在第一方向x上移动的固定机构813以及用于从下面支撑单元块cb的支撑单元815。
310.一对固定主体811可以跨单元块cb彼此面对。单元块cb可以固定在一对固定主体811之间。
311.固定主体811可以包括在第二方向y上形成得较长的竖直面板以及在单元块cb的相反方向上延伸并连接到竖直面板上的固定机构813的连接器。
312.用于对与单元块cb接触的单元块cb加压的加压单元812可以设置在固定主体811上,更详细地,设置在竖直板的内表面上。
313.可以设置用于将一对固定主体811中的每个在第一方向x上驱动的一对固定机构813。该一对固定机构813可以在第一方向上彼此分隔开。固定机构813可以包括致动器(例如,驱动缸)。
314.支撑单元815可以从下面支撑单元块cb。固定机构813和支撑单元815可以由支撑框架814支撑。
315.可以设置彼此分隔开的多个夹持单元820。例如,可以设置两对夹持单元820。任一对夹持单元820可以夹持组装到单元块cb一侧的汇流条bb(参照图25)的两端,而另一对夹持单元820可以夹持组装到单元块cb另一侧的汇流条bb的两端。
316.夹持单元820可以包括向上、向下彼此分隔开的一对竖直销821、用于调整一对竖直销821之间的竖直距离的夹持机构823以及用于使一对竖直销821在第一方向x上移动的水平移动机构825。
317.该一对竖直销821可以被放置成直线。竖直销82可以被插入形成在汇流条bb中的销孔中,并可以夹持汇流条bb。
318.一对竖直销821可以连接到上下彼此分隔开的一对销连接主体822。一对竖直销821之中的处于上侧的竖直销821可以朝向一个销连接主体822的下侧突出,并且一对竖直销821之中的处于下侧的竖直销821可以朝向另一个销连接主体822的上侧突出。
319.夹持机构823可以调整一对销连接主体822之间的竖直距离。夹持机构823可以上下设置得较长,并可以连接到一对销连接主体822。夹持机构823可以包括致动器(例如,驱动缸)。
320.夹持机构823可以通过连接框架824连接到水平移动机构825。
321.水平移动机构825可以使夹持机构823以及与其连接的竖直销821和销连接主体822在第一方向x上移动。水平移动机构825可以在第一方向x上设置得较长。水平移动机构825可以包括致动器(例如,驱动缸)。水平移动机构825可以由支撑框架826支撑。
322.因此,可以根据固定到固定单元810的单元块cb和组装到其上的汇流条bb的位置来调整各夹持单元820的竖直销821的位置。
323.下文中,参考图25,将详细描述组装单元830。
324.可以设置处于单元块cb两侧的一对组装单元830。也就是说,一对组装单元830可以在第二方向上分隔开并可以彼此面对(参照图23)。一对组装单元830可以各自组装固定到固定单元810的单元块cb的两端处的汇流条bb。
325.组装单元830可以包括用于夹持汇流条bb的夹持件831、用于使夹持件831绕第一方向x的旋转轴旋转的旋转机构835以及用于使夹持件831移动的移动机构837、838和839。
326.移动机构837、838和839可以各自是3轴笛卡尔坐标机器人。
327.更详细地,移动机构837、838和839可以包括用于使夹持件831升降的升降机构837、用于使夹持件831在第二方向y上移动的第一移动机构838以及用于使夹持件831在第一方向x上移动的第二移动机构839。
328.升降机构837可以包括致动器(例如,伺服电机)以及上下形成得较长的连接机构(例如,z轴笛卡尔坐标机器人)。升降机构837可以通过具有“l”形状的弯曲框架836连接到夹持件831。
329.第一移动机构838可以包括致动器(例如,伺服电机)以及连接到升降机构837并在
第二方向y上形成得较长的连接机构(例如,y轴笛卡尔坐标机器人)。
330.第二移动机构839可以包括致动器(例如,伺服电机)以及连接到第一移动机构838的连接机构(例如,x轴笛卡尔坐标机器人)。
331.旋转机构835可以包括致动器(例如,旋转电机)。旋转机构835可以通过弯曲框架836连接到夹持件831。因此,旋转机构835可以随夹持件831移动。可以通过旋转机构835调整夹持件831和由此夹持的汇流条bb之间的角度。
332.夹持件831可以将汇流条bb竖直地夹持。汇流条bb可以在第一方向x上形成得较长,并可以组装到单元块cb的两端。
333.更详细地,夹持件831可以包括上下彼此分隔开的一对夹持主体832、用于调整一对夹持主体832之间的竖直距离的夹持机构833以及连接到旋转机构835并由弯曲框架836支撑的连接器834。
334.汇流条bb可以夹持在一对夹持主体832之间。夹持机构833可以通过调整一对夹持主体832之间的距离来夹持或释放汇流条bb。夹持机构833可以包括致动器(例如,驱动缸)。
335.下文中,将参考图26详细地描述扫描单元840和绝缘单元850。
336.扫描单元840可以设置在固定单元810的下方。扫描单元840可以测量作为固定到固定单元810的单元块cb的全宽方向的第一方向x上的堆叠容差。
337.扫描单元840可以包括扫描仪841和用于使扫描仪841在第二方向y上移动的扫描机构842。
338.扫描仪841可以是3d扫描仪,但不限于此。扫描仪841可以向上设置,以扫描单元块cb的下表面。
339.扫描机构842可以使扫描仪841在第二方向y上移动。因此,扫描仪841可以测量单元块cb的全长方向(第二方向)上的堆叠容差。扫描机构842可以包括致动器(例如,伺服电机)以及连接到扫描仪841并在第二方向上形成得较长的连接机构(例如,1轴笛卡尔坐标机器人)。
340.可以设置处于单元块cb两侧的一对绝缘单元850。也就是说,一对绝缘单元850可以在第二方向上彼此分隔开并可以彼此面对。为了方便起见,图26仅例示了一个绝缘单元850。
341.该一对绝缘单元850可以防止设置在固定到固定单元810的单元块cb的两端处的多条引线cl之间短路。
342.更详细地,绝缘单元850可以包括形成有其中插入引线cl的多个狭槽720a的绝缘主体851、用于使绝缘主体851升降的升降机构853以及用于使绝缘主体851在第二方向y上移动的水平移动机构855。
343.当从引线cl的下侧升高绝缘主体851时,引线cl可以插入狭槽851a中。当汇流条bb组装好时,绝缘主体851可以降低。因此,汇流条bb可以容易地组装到单元块cb的两端。
344.绝缘主体851可以联接到竖直设置的联接主体852的上部部分。绝缘主体851可以随联接主体852升降。
345.升降机构853可以连接到联接主体852。升降机构853可以包括致动器(例如,驱动缸)。
346.升降机构853可以通过连接框架854连接到水平移动机构855。水平移动机构855可
以包括致动器(例如,驱动缸)。
347.下文中,将参考图27详细描述视觉单元860。
348.可以设置处于单元块cb两侧的一对视觉单元860。也就是说,一对视觉单元860可以在第二方向y上彼此分隔开并可以彼此面对。为了方便起见,图27仅例示了一个视觉单元860。
349.在汇流条bb组装到与固定单元810固定的单元块cb之后,一对视觉单元860可以检测引线cl是否正常地插入汇流条bb之间。
350.更详细地,视觉单元860可以包括视觉传感器861以及用于使视觉传感器861在第一方向x上移动的移动机构863。
351.视觉传感器861可以面对组装到单元块cb两端的汇流条bb。视觉传感器861可以通过连接框架862连接到移动机构863。
352.移动机构863可以由支撑件864支撑。也就是说,支撑件864可以支撑移动机构863,以将视觉传感器861保持在对应于单元块cb的高度处。
353.移动机构863可以包括致动器(例如,伺服电机)以及连接到扫描框架862并在第一方向上形成得较长的连接机构(例如,1轴笛卡尔坐标机器人)。
354.因此,视觉传感器861可以在作为单元块cb的全宽方向的第一方向x上检查多条引线cl和汇流条bb的状态。
355.以上描述仅仅本公开的技术精神的例示,并且对于本公开所涉及的本领域技术人员,在不偏离本公开的基本特征的情况下,各种修改形式和变形形式将是可能的。
356.因此,本发明中公开的实施方式不旨在限制本公开的技术精神,而是进行说明,并且本公开的技术精神的范围不受这些实施方式的限制。
357.本公开的范围应该通过所附权利要求书进行理解,并且其等同范围内的所有技术思路应该被解释为被包括在本公开的范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。