用于工业机器到机器通信的包括传播延迟感知调度的无线tdma调度的方法和系统
技术领域
1.本发明涉及工业通信,例如用于工业监测和控制目的(例如监视和控制电力系统、监测和控制工业制造设施中的设备)、和/或用于执行其他工业自动化控制和监视任务的通信方法和系统。
2.特别地,本发明涉及tdma通信的调度,并且与无线和有线通信相关。
背景技术:
3.在工业通信中,许多从节点(例如传感器和/或执行器节点)连接到中央网络控制器或网关,例如主节点。在许多工业应用(例如变电站自动化)中,从节点以距主节点的不同距离进行设置。一种已知的避免冲突的方法是使用有线通信系统,并且针对从节点和主节点之间的每条通信链路使用相同长度的光纤,使得每个从节点到主节点的传输时间将是相同的。这种解决方案在避免冲突方面是有效的,然而缺乏成本效益。使用无线通信是一种替代方案,其可以提供相对更低成本,然而无法通过平衡通信距离避免冲突。
4.在无线tdma系统中避免冲突的一种方法是利用来自不同节点的数据包之间的保护时间。节点可以被调度成在时隙中进行传输,并且每个时隙中的保护时间确保传输不会干扰下一个时隙中的传输。这种调度相对简单,然而,使用保护时间可能会对节点之间的通信延迟产生负面影响。如果保护时间比时隙短,则保护时间对整体延迟的负面影响将是小的。如果保护时间的大小具有可比性(例如为传输时隙的持续时间的20%或更大),则保护时间将具有更大负面影响。在许多实例中,所使用的保护时间可以相对较小。在与大数据包的短距离传输相关的例如wi
‑
fi
tm
通信系统中,保护时间相对较小,并且例如用于避免冲突的保护时间可以小于传输时间的1%,例如具有100μs(微秒)长数据包并使用1μs的保护时间。对于其他应用,使用保护时间将产生更大负面影响。
5.chen等人的文章“ldmac:a propagation delay
‑
aware mac scheme for long
‑
distance uav networks”(e1)描述了处理时间要求严格的无线通信中的传播延迟问题。e1尤其涉及基站和多个无人机或无人驾驶飞行器(uav)之间的无线通信。uav和基站之间的距离会发生变化并且从而导致传播延迟。为了避免通信冲突,e1建议使用“传播延迟感知接入方案”,参见e1的摘要。简而言之,见e1的4.1章中,无人机(uav)包括gps单元并使用gps确定其与基站的距离和传播延迟。然后,无人机选择通信的到达时隙并计算对应传输时间。
6.e1的方法主要针对远距离,例如公里,并且这种“传播延迟感知方案”在更窄范围通信中可能比使用保护时间更复杂。
7.更短距离通信(比e1中更短)可能会遇到类似的冲突问题。在工业应用中(例如在制造自动化或变电站自动化中),需要相对频繁地传输相对短的数据包。从传感器收集信息并将控制数据或设置通信到执行器或控制单元的数据包通信可以在包括大约100位的数据包中提供,其中,传输时间并且因此时隙持续时间可以大约为1μs。无线电波在1μs内传播大约300m,并且因此,用于避免分开30米的节点之间发生冲突的保护时间可以为这种1μs长时
隙持续时间的大约十分之一。
8.在有线通信中,可以使用不同长度的光纤来平衡传输时间。无线传输在安装上可能更经济,并且设置保护时间可以是避免冲突的有效方法,然而,保护时间可能通过对通信的整体周期时间产生负面影响而引入问题。延续为每个时隙的约30%的保护时间将导致通信周期的延迟增加30%。
9.在对低延迟具有高要求的工业应用中,保护时间应该较短;然而,缩短保护时间会增加发生冲突的风险。使用如在e1系统中延迟感知调度,可以避免冲突并保持低延迟,然而,使用保护时间避免冲突可以有助于复杂性更低的调度。
10.us8086249(e2)描述了一种通信方法,其包括确定无线通信装置和接入节点(类似于从节点和主节点)之间的距离,并使用所述距离确定通信的延迟。e2还公开了基于延迟对“从”节点和“主”节点之间的通信进行定时(e2的摘要和图4)。e2解决了装置之间的导致比正常的更长延迟的大距离(e2的第1栏第26
–
33行)的问题,尤其是导致比根据使用的通信协议所允许的更长延迟的距离(e2的第9栏第43
‑
55行)的问题。根据e2的解决方案是用于确定接入节点和装置之间的通信链路的延迟是否超过预定义阈值,并基于是否违反阈值来调整接入节点和装置之间的定时(e2的第7栏第14行
‑
第8栏第9行)。根据所使用的协议,阈值通常被设置为通信链路的最大允许延迟(例如参见e2的第9栏第54
‑
55行)。
技术实现要素:
11.本发明的目的在于提供一种用于适合于工业应用(例如工业自动化)的无线通信的方法,该无线通信还可以有助于低延迟和高可靠性,或者在于至少提供一种对现有技术的无线通信方法的替代。
12.为此,本发明的第一方面提供了一种在基于tdma的通信系统中的调度方法,在该通信系统中,第一节点或接入节点使用相应通信链路与多个第二节点或从节点进行通信。该方法包括在时隙中调度通信。具体地,调度方法包括:
13.‑
获取针对每个通信链路的传播时间;
14.‑
确定两个通信链路之间的传播时间的最大差值;
15.‑
将最大差值与阈值进行比较;以及
16.‑
在最大差值小于阈值时使用第一调度模式;
17.‑
在最大差值大于阈值时使用第二调度模式。
18.第一调度模式包括:
19.‑
选择要在时隙中的每个时隙中应用的保护时间,该保护时间(gt)是基于最大差值的,以及调度每个第二节点以用于在所述时隙中的相应时隙内进行传输。
20.第二调度模式包括:
21.‑
调度来自每个第二节点的传输以在所述时隙的相应时隙内到达第一节点,其中,对每个第二节点的传输的调度是基于所讨论的第二节点的通信链路的相应传播时间的。优选地,第二模式的调度包括以与第二节点的传播时间相等的定时提前调度每个第二节点。
22.第一模式的保护时间应足够大以容纳最大差值,而在第二模式中,传播时间或延迟通过调度来自第二个节点的传输进行处理。第一调度模式调节保护时间以避免通信冲突。
23.操作模式的选择是基于传播时间的最大差值的。在第一模式中,针对时隙的保护时间的选择是基于传播时间的最大差值的,其中,调度是基于最大差值的。在第二模式中,调度是基于通信链路的相应传播时间或传播延迟的,其中,对来自每个(第二)节点的传输的调度是基于所讨论的节点和第一节点之间的传播时间的。因此,第二调度模式是传播延迟感知的;使用传播延迟感知以避免通信冲突。
24.在第一方面的实施例中,第一模式还包括调度从第一节点到第二节点的传输,以及将来自第二节点的传输切换到来自第一节点的传输,其中,该方法还包括在将来自第二节点的传输切换到来自第一节点的传输时调度一个或多个空闲时隙。
25.在第一方面的实施例中,第二模式包括调度从第一节点到第二节点的传输,以及将来自第一节点的传输切换到来自第二节点的传输,其中,该方法还包括在将来自第一节点的传输切换到来自第二节点的传输时调度一个或多个空闲时隙。
26.在第一方面的实施例中,第二调度模式包括以等于传播时间的定时提前调度来自每个第二节点的传输。
27.本发明的第二方面提供了一种用于在时隙中调度基于tdma的通信的网络。网络控制器被配置为执行根据第一方面的任何实施例的调度方法。网络控制器包括:
28.‑
通信接口,其用于与待调度的通信节点通信,
29.‑
传播时间获取器,其用于获取通信链路的传播时间的,
30.‑
差值计算器,其用于确定所获取的传播时间之间的差值,
31.‑
操作模式选择器,其用于根据传播时间之间计算的最大差值选择操作模式,
32.‑
第一模式调度器,其用于根据第一调度模式调度基于tdma的通信,
33.‑
第二模式调度器,其用于根据第二调度模式调度基于tdma的通信,以及
34.‑
节点通知器,其用于将调度通知每个调度节点。
附图说明
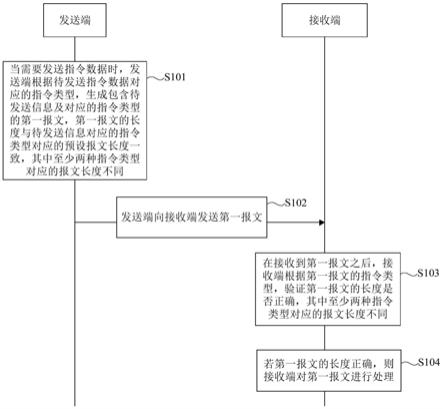
35.图1图示了包括接入节点和多个从节点的无线通信网络;
36.图2图示了根据实施例的tdma调度;
37.图3图示了根据实施例的tdma调度;
38.图4图示了根据实施例的用于调度的方法;
39.图5图示了本发明的网络控制器的实施例;
40.图6示出了计算机可读介质。
具体实施方式
41.图1图示了具有星形配置的无线通信网络1,其中,第一节点或接入节点2与多个从节点、第二节点或控制节点3通信。接入节点2通常通信连接到总体控制系统,以便还提供总体控制系统和从节点3之间的访问,然而,这种总控制系统未在图1中示出。每个控制节点3通常连接到或包括底层工业自动化过程的执行器或传感器,然而,这种工业过程在图1中未示出。网络控制器5被配置用于调度控制节点3和接入节点2之间的通信。在图1的实施例中,网络控制器5包括在接入节点2中,然而,网络控制器5可以替代地是单独的单元。为了区分从节点3,这些从节点被编号为3.1、3.2、3.3、...、3.n,并且所示的实施例示出了多个n个从
节点3.1
‑
3.n。接入节点2和每个从节点3.1
‑3‑
n之间的相应通信链路4.1
‑
4.n由虚线示出。这些从节点3.1
‑
3.n中的任何一个在下文中也将被称为从节点“3.k”。
42.图2和3图示了接入节点2和多个从节点3.1
‑
3.n(以三个从节点3.1
‑
3.3为例)之间的tdma通信的调度。
43.图2的下部分示出了这里使用的一些概念。这里,时隙ts用于调度数据通信。用于来自第二节点3.k的传输的时隙ts(no 1)以保护时间gt开始,然后是数据传输,例如在传输时间tt期间的上行链路ul传输。时隙ts的持续时间等于传输时间tt加上保护时间gt。上行数据将行进到第一节点2,并且该行进的时间称为传播时间pt。在下一时隙ts(no 2)中接收上行链路数据并且该接收将等于传播时间pt的量延伸到下一时隙ts(no 2)。保护时间gt可以大于传播时间pt,在这种情况下,接收在下一上行链路数据(虚线内的ul no 2)传输(从未示出的另一第二节点)之前结束。在可以称为接收时间rt的时间间隔期间接收对上行链路数据的接收,该时间间隔等于传输时间tt。
44.根据本发明,通信可以被调度为使得传输在时隙内被接收和/或传输。通信可以被调度为使得接收和/或传输从一个时隙延伸到另一时隙。如图2的下部分中,时隙ts通常以保护时间gt开始,但可以使时隙可替代地以保护时间gt结束。
45.图2在附图的上部分中还图示了根据本发明的第一模式的调度。在第一模式中,针对每个时隙设置保护时间gt以避免冲突。第一模式的下行链路通信(以dl1、dl2和dl3为例)优选地在连续的时隙中进行调度。此外,上行链路通信(以ul1、ul2、ul3为例)优选地在连续的时隙中进行调度。下行链路和上行链路两者的每次传输都被调度成在保护时间结束时开始,即每个时隙均以保护时间开始,并且传输被调度成在保护时间结束时开始使得传输将在时隙的剩余部分中执行。如可以看出的,在后续的时隙中部分地接收每个传输。在这个示例中,保护时间gt设置为0.3μs。每个相应的第二(从)节点3.1、3.2、3.3到第一(接入)节点2之间的传播时间pt.1、pt.2、pt.3分别是0.4μs、0.1μs和0.3μs。应当注意,在该第一模式中,一个或多个传播时间pt.k可以大于保护时间gt。保护时间应设置为略大于最大和最小传播时间之间的差值。还应注意,图2中节点3.1和节点2之间具有最大传播时间的传输将在保护时间结束后被接收。使用小于最大传播时间pt的保护时间gt有助于低延迟。通过对保护时间的这种选择,上行链路传输将被分开并且下行链路传输将被分开,使得在上行链路和下行链路两者中避免冲突。然而,当从上行链路切换到下行链路通信或者从下行链路切换到上行链路通信时,而例如在切换之前的最后传输具有大于保护时间的传播时间的情况下可以调度空闲时隙。在所示的示例中,即使ul3的传播时间(pt.3=0.3μs)等于或小于示例的保护时间gt>0.3μs,空闲时隙也被调度在“ul3”之后。上行链路和下行链路之间的空闲时隙会增加延迟,但是对于整个通信周期而言,这种增加通常很小,尤其是当节点数量很大时。即使上行链路和下行链路之间可能不总是需要空闲时隙,但当包括这种空闲时隙时,也有助于调度。可以使用多于一个空闲时隙。空闲时隙的数量可以基于传播时间pt.1
‑
pt.n,例如最大传播时间。调度可以适于调度第二节点3.1
‑
3.n中的在调度中最后具有最短或相对较短的传播时间的一个节点,即,适于在切换到下行链路之前传输上行链路的最后一个。调度具有如此短的传播时间的第二节点3.k减少了对空闲时隙的需求。
46.例如,如果一组从节点3.1
‑
3.n位于(彼此相对靠近并且)距接入节点2大约100m处,则传播时间pt.i
‑
pt.n可以在0.3μs和0.4μs之间变化。保护时间可以设置为最大差值,
即0.1μs。通过设置保护时间以适应最大差值并略大于最大差值(在这种情况下约为0.1μs),而不是大于最大传播时间(在这种情况下为0.4μs),即使在下行链路和上行链路之间切换时或相反时添加空闲时隙,延迟仍可以保持较低。如果节点数量多,则总周期时间的减少将会很大。当基于传播时间之间的最大差值而不是基于最大传播时间选择保护时间时,该示例的时隙持续时间将降低约0.3μs,并且对于50个这种时隙而言,总周期时间可以降低15μs。在每个传输时间或接收时间约为1μs的系统中,15μs差值将相当大。
47.当从节点3.1
‑
3.n与接入节点2的传播时间pt.1
‑
pt.n之间的最大差值maxδ更大时,在第一模式中,保护时间当然将较大。
48.当确定最大差值maxδ过大,即大于设定的阈值时,根据本发明选择第二模式。该阈值应根据底层工业过程的要求进行设置,尤其是根据对来自传感器节点的测量样本频率的相关要求、或例如对执行器响应监测信号的控制要求进行设置。第二模式增加了调度的复杂度,但降低了总体时延,并且基于底层工业过程,应该选择阈值。通信系统的节点数量也将影响总体周期时间,并且在节点相对少的系统中,可以容忍相对更大的保护时间。阈值可以适当地设置为时隙的持续时间的一定比例。通过将阈值设置为时隙的一定比例,阈值将适于可能由通信系统中的其他变化(例如底层工业自动化过程的周期时间)引起的时隙长度的变化。阈值的通常值将为时隙的10%到30%。然而,如所述地,阈值将根据底层工业自动化过程,并且对于通信节点很少(少于10个)或者通信节点很多(多于200个)的通信系统而言,大于30%或小于10%的阈值也可以很合适。
49.在第二模式中,基于传播时间pt.1
‑
pt.n、即对于每个从节点3.k基于其相应的传播时间pt.k调度通信。图3图示了根据第二模式的调度。
50.在此处给出的示例中,在时隙ts中被调度用于传输的上行链路ul或下行链路dl通信将在保护时间gt结束后被调度用于传输开始并且直到时隙ts结束,如在图2的下部分中传输时间tt。
51.此外,在示例中,当ul或dl通信被调度用于在时隙ts中进行接收时,其将被调度用于从保护时间gt结束后开始直到时隙ts结束进行接收。在延迟感知调度的第二模式中,ul通信中的每个均被调度用于在时隙(即相应时隙)内在接入节点2处进行接收。在用于在时隙内进行接收的这种调度中,通信将被调度成在保护时间gt开始之前开始等于传播时间pt的时间段,例如如图3的上部分所示的上行链路通信ul1、ul2、ul3。图3的下部分示出了可以在第二模式的延迟感知调度中使用的定时提前的概念。第二上行链路“ul no 2”在第二时隙(ts no 2)之前的某个时间从从节点3.k传输,以便在保护时间之后在第二时隙(ts no 2)中在接入节点2处被接收。在本示例中,传输时间点在第二时隙(ts no 2)的保护时间gt结束的一定的提前时间发生,该一定的提前时间等于通信链路4.k的传播时间pt。该提前时间可以称为“定时提前”52.ta。
53.在ul通信的延迟感知调度的情况下,ul通信可以被调度用于在时隙ts的保护时间gt内进行传输、或者在时隙ts的保护时间gt之前(即在前一个时隙期间ts)进行传输。在图3的上部分所示的第二模式的实施例中,每个第二节点3.k均被调度成在接收时隙的保护时间结束的一定提前时间、即“定时提前”ta.k开始传输,该提前时间等于所讨论的第二节点3.k的ul通信的传播时间pt.k。
54.如图3所示,通信被调度为使得接入节点2将在时隙内接收上行链路数据通信并传输下行链路数据通信。第二节点3.1
‑
3.n中的每个节点3.k将根据其相应的传播时间pt.k接收下行链路数据。因此,下行链路数据通信的调度包括调度接入节点2以在针对第二节点3.1
‑
3.n的相应时隙中、优选地在连续的时隙内进行传输。优选地,针对每个第二节点3.k的一个时隙。此外,上行链路数据通信的调度包括调度每个第二节点3.k以利用等于其传播时间pt.k的定时提前ta.k进行传输,使得ul数据在专用于从该第二节点3.k.接收数据通信的时隙中到达第一节点2,即接入节点2。因此,第二节点3.1、3.2、3.3被调度成以相应的定时提前ta.1、ta.2、ta.3传输上行链路数据,其中,每个定时提前均等于所讨论的通信链路4.k的对应传播时间pt.1、pt.2、pt.3。
55.图3的上部分中的实施例的传播延迟感知调度包括在从dl传输切换到ul传输时使用空闲时隙。使用这种空闲时隙是防止由于从节点3.k在另一个从节点3.k已经接收到其dl传输之前开始其ul传输而引起的通信冲突的优选方式。因此,在第二模式中,第二节点3.1
‑
3.n应优选地不被允许在第二节点中的最后一个节点已接收其dl之前进行传输。基于最后一个dl通信(在图3的上部分中由dl3所示的)的传播时间(例如pt.3)以及第一个上行链路传输(在图3的上部分中由ul1所示的)的定时提前(例如ta.1),可以使用多于一个空闲时隙。
56.在该第二模式中,保护时间可以比较低并应优选地基于第二节点的相应时钟进行设置,即,设置成容纳相应第二节点3.k和接入节点2的每个时钟的同步差值。保护时间应根据网络中的节点的同步精度进行设置。同步过程本身不是本发明的特征且本文不再进一步描述。在图3的示例中,保护时间被设置为0.1μs,其小于图2的0.3μs保护时间并小于阈值。因此,第二操作模式的保护时间既不基于传播时间pt.1
‑
pt.n也不基于最大差值(maxδ);而是优选替代地基于从节点3.1
‑
3.n的时钟和接入节点2时钟之间的同步中的相应差值。
57.图4示出的调度tdma通信的方法100,其适用于有线和无线通信。该方法开始于获取102通信系统中的每个链路4.1
‑
4.n(例如图1的示例中的接入节点2和从节点3.1
‑
3.n之间的链路中的每一个链路)的传播时间或延迟。
58.可以以任何已知的方式执行获取102传播时间。例如,
59.‑
每个节点3.k、或节点3中的一些节点,可以配置有gps单元、或其他位置确定设备,并将其位置报告至网络控制器5,该网络控制器5根据位置指示确定传输时间;
60.‑
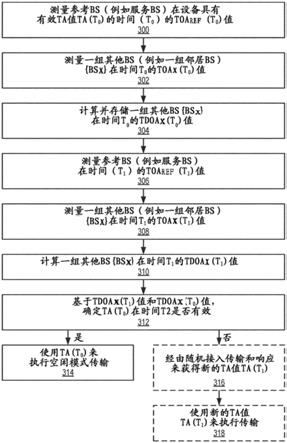
可以通过查看包含在节点之间的消息中的信息、例如使用到达角(aoa)、到达时间(toa)、到达时间差值(tdoa),估计每个节点3.k或节点3中的一些节点旁边与接入节点2之间的距离,距离可以被报告至网络控制器5并被用于确定传播时间;或者
61.‑
可以在通信节点3、特别是对于安装后保持静止的节点的安装期间确定每个节点3.k或节点3中的一些的位置(包括接入节点2的位置),在此之后,位置被传输到网络控制器5并被用于确定传播时间,或者位置用于确定随后被报告至网络控制器5的传播时间。获取102传播时间也可以通过示例技术的组合来执行。
62.调度方法100继续比较103所述传播时间。比较103传播时间包括确定104通信链路4.1
‑
4.n的传播时间之间的差值。特别地,比较103包括确定104从节点3.1
‑
3.n中的任何一个到接入节点2的通信链路4.1
‑
4.n的传播时间之间的最大差值(maxδ)。此外,调度方法100包括确定106两个传播时间之间的最大差值(maxδ)是否小于或大于预定阈值。基于通
过通信控制和/或监测的底层工业过程,可以优选地设置阈值。基于这种工业过程,可以使用通信周期的总延迟或总持续时间的最大值确定在通信中引起最大或更短总延迟的阈值。可以注意到,由于节点数量影响通信周期的总长度,因此在容忍类似总延迟的不同但相似的工业过程中的通信调度可以基于节点数量而使用不同阈值。
63.基于与阈值的比较,方法100应用不同的调度模式。如果最大差值maxδ小于阈值,则根据传输时间的最大差值、特别是采用保护时间调度108通信(以第一模式),以避免由于传输时间中的差值而引起的冲突。采用保护时间的调度108优选地包括将连续的传输之间的保护时间设置109足够大以容纳最大差值maxδ。因此,保护时间应优选地设置为最大确定差值或稍大于该最大确定差值。然后,阈值将限定最大可容忍传播延迟差值。
64.在该第一模式中,保护时间可替代地等于阈值。通过避免设置109保护时间,这种调度将不那么复杂,然而,延迟通常会比所需要长。
65.如果最大差值(maxδ)大于阈值,则调度方法选择另一(第二)控制模式(110、112、114)。第二控制模式(110、112、114)是传播延迟感知控制模式,并且包括根据所确定的传播时间pt.1
‑
pt.n调度110传输。由于传播延迟将在该调度模式中被处理,因此优选地设置112连续的传输之间的保护时间为可以远小于阈值的小的值。在该第二模式的图示实施例中,以定时提前调度114上行链路中的传输,以在连续的时隙中到达接入节点2,所有上行链路传输均被调度用于在不同时隙中到达。优选地,基于所获取102的传播延迟,以与该链路的传播时间相等的定时提前调度每个上行链路传输。
66.一旦已经确定了控制模式并且已经计算了上行链路和下行链路传输两者的调度,则网络控制器5将该调度通知116节点3.1
‑
3.n。例如,这可以通过由接入节点2在通信周期开始时传输的广播信标帧来完成。
67.可以重复该方法使得更新122调度。例如,该方法可以有规律地重复,例如在一定数量的通信周期或一定时间之后。替代或附加地,可以监测通信接口并且如果传播时间改变多于预定量,则网络控制器5将更新122调度。因此,可以有规律地或基于无线电通信接口的变化更新122调度。为此,重复步骤102
‑
116并且创建新的调度并将该新的调度分发到节点3.1
‑
3.n。
68.图5图示了网络控制器5的示例,该网络控制器被配置为执行根据本发明并且如图4所例示的调度方法。网络控制器5被图示为接入节点2的整体部分,但是可以是独立单元。网络控制器5包括由被配置为执行本文描述的调度方法的功能块所示的硬件和软件。为此目的,网络控制器5包括被配置用于与从节点3.1
‑
3.n无线通信的通信接口51并且还可以包括用于与另一控制系统(未示出)进行有线或无线通信的电路。网络控制器被配置为使用通信接口来获取第二节点3.1
‑
3.n的每个通信链路4.1
‑
4.n的传播时间pt.1
‑
pt.n并且来向每个第二节点3.k传达通信调度。网络控制器5包括传播时间获取器52,对应于调度方法100中获取102传播时间的过程,其被配置为使用所述通信接口51来获取所述传播时间。网络控制器还包括节点通知器66,其被配置为将第二节点3.k的调度通知给每个第二节点3.1
‑
3.n,包括通知通信系统的时隙的保护时间gt和相应定时提前ta.k。
69.网络控制器5还包括差值计算器54,其被配置为确定第二节点3.1
‑
3.n之间的传播时间pt.1
‑
pt.n的最大差值,该差值计算器被配置为执行调度方法100中的确定104最大传播延迟差值。
70.网络控制器5还包括模式选择器56,其被配置为基于所确定的最大差值maxδ选择操作模式。网络控制器5被配置为借助模式选择器执行确定106最大差值是否大于或小于阈值,并且在最大差值maxδ更大时选择第一模式且在最大差值maxδ更小时选择第二模式。
71.网络控制器5包括用于执行第一模式(108、109)的电路(58、59)以及用于执行第二模式(110、112、114)的电路(60、62、64)。
72.网络控制器5包括用于调度接入节点2和第二节点3.1
‑
3.n之间的通信的第一模式调度器58,第一模式调度器58被配置为基于最大差值maxδ调度通信。第一模式调度器58优选地包括保护时间设置器59,其基于最大差值maxδ设置时隙的保护时间,特别是设置得足够大以容纳最大差值maxδ。
73.网络控制器5包括用于调度接入节点2和第二节点3.1
‑
3.n之间的通信的第二模式调度器60,该第二模式调度器60被配置为基于传播时间pt.1
‑
pt.n调度通信。通信被调度用于在每个时隙中在接入节点2中进行接收和传输。特别地,第二模式调度器60包括节点调度器64,该节点调度器64被配置为以与所讨论的第二节点3.k的传播时间4.k相等的定时提前ta.k调度每个第二节点3.k。还优选地,第二模式调度器60包括保护时间设置器62,其被配置为设置通信时隙的保护时间,该保护时间被设置为壁由模式选择器56用于模式选择106的阈值小的值。
74.图6示出了计算机可读光学介质90。图4的方法可以实现为包括指令的计算机程序91(软件),当程序由可编程计算机执行时,这些指令使计算机执行这些方法中的任何一个。特别地,指令可以例如用于使网络控制器5在时隙(ts)中调度基于tdma的通信,该网络控制器包括:
75.‑
通信接口51,其用于与待调度的通信节点2、3.1
‑
3.n通信,
76.‑
传播时间获取器(52),其用于获取通信链路4.1
‑
4.n的传播时间,
77.‑
差值计算器54,其用于确定所获取的传播时间之间的差值,
78.‑
操作模式选择器56,其用于基于传播时间之间的计算出的最大差值选择操作模式,
79.‑
第一模式调度器58,其用于根据第一调度模式调度基于tdma的通信,
80.‑
第二模式调度器60,其用于根据第二调度模式调度基于tdma的通信,以及
81.‑
节点通知器66,其用于将调度通知每个被调度的节点2、3.1
‑
3.n,
82.以执行图4的方法。计算机程序91可以存储或分布在如图6所示那个类似的计算机可读介质90上。另一计算机可读介质包括非易失性(包括永久和非永久存储)和易失性介质,例如随机存取存储器、磁性、光学或固态存储器、固定和可移动存储驱动器。计算机可读介质还可以被系统化为非暂时性介质,包括存储介质、和暂时性介质,例如携带信息的调制电磁波或光波。
83.已经参考附图在实施例中描述了本发明。在这些实施例中,本发明提供了一种在基于tdma的通信系统1中在第一节点2和多个第二节点3.1
‑
3.n之间借助相应通信链路4.1
‑
4.n.进行调度的调度方法。本发明还描述了一种用于执行这些实施例中的调度方法的网络控制器。该方法包括获取(102)每个通信链路(4.1
‑
4.n)的传播时间(pt.1
‑
pt.n);以及确定(104)两个通信链路(4.1
‑
4.n)的传播时间(pt.1
‑
pt.n)中的最大差值(maxδ)。该方法还包括在最大差值(maxδ)小于阈值的情况下选择第一调度模式(108、109)以及在最大差值
(maxδ)大于阈值的情况下选择第二调度模式(110、112、114)。第一模式(108
‑
109)包括针对时隙(ts)选择(109)保护时间(gt),该保护时间(gt)基于最大差值(maxδ)。第二调度模式(110、112、114)是传播延迟感知的并且包括基于相应传播时间(pt.k)调度(110)来自每个第二节点(3.k)的传输。
84.然而,本发明不限于这些实施例,而是可以在权利要求的范围内由本领域技术人员进行改变。
85.参考文献
86.e1:chen,x.等,ldmac:a propagation delay
‑
aware mac scheme for long
‑
distance uav networks,computer network,第144卷,2018年10月24日,第40
‑
52页。
87.e2:us 8,086,249 b1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。