1.本实用新型涉及检具技术领域,具体是一种适用于多车型的雪橇检具机构。
背景技术:
2.检具是工业生产企业用于控制产品各种尺寸(例如孔径、空间尺寸等)的简捷工具,提高生产效率和控制质量,适用于大批量生产的产品,如汽车零部件,以替代专业测量工具,如光滑塞规、螺纹塞规、外径卡规等。
3.在汽车生产的过程中,对裸车架的运输常常会用到雪橇运输机构,将裸车架短距运送至下一工序,但常规的雪橇运输机构只适用于单独车型或外形类似车型,在研发新型车辆时不能更好地兼容,同时雪橇运输机构上有对车架起到固定作用的限位杆或固定螺丝等,若是限位杆或固定螺丝脱落或导致车架在运输的过程中发生横向位移,不利于车架加工的后续工作;为此,我们提供了一种适用于多车型的雪橇检具机构解决以上问题。
技术实现要素:
4.本实用新型的目的就是为了弥补现有技术的不足,提供了一种适用于多车型的雪橇检具机构。
5.为实现上述目的,本实用新型提供如下技术方案:一种适用于多车型的雪橇检具机构,包括平台主体,所述平台主体的下方设置有四个升降机构,所述平台主体的底面固定连接有旋转电机一,所述旋转电机一的输出转轴固定连接有主动轮一,所述平台主体的下方设置有链条一,所述平台主体的上表面固定连接有八组等距离排列的固定板组一,每组所述固定板组一的内部均转动连接有轴承,每个所述轴承的外表面均转动连接有一组传送导轨,所述平台主体的上方设置有两个雪橇板,且每组传送导轨均与两个雪橇板传动连接,所述平台主体的上表面固定连接有平移机构,所述平台主体的正面固定连接有旋转电机二,所述旋转电机二的输出转轴固定连接有主动轮二,所述平台主体的前方设置有链条二,所述平台主体的上表面固定连接有监测机构。
6.进一步的,所述升降机构包括四个底座,四个所述底座的上表面均固定连接有单向螺纹杆,且四个单向螺纹杆的上表面均贯穿平台主体的底面并延伸至平台主体的上部,四个所述单向螺纹杆的外表面均螺纹连接有驱动块一,且四个驱动块一均位于平台主体的下方,四个所述驱动块一的底面均固定连接有从动轮一,且四个从动轮一均通过链条一与主动轮一传动连接。
7.进一步的,所述平移机构包括两组固定板组二、两组驱动块二和一组限位槽,每组固定板组二内部均转动连接有双向螺纹杆,且两个双向螺纹杆的正面分别贯穿两组固定板组二并延伸至固定板组二的前方,两个所述双向螺纹杆的正面均固定连接有从动轮二,且两个从动轮二均通过链条二与主动轮二传动连接。
8.进一步的,两组所述驱动块二分别与两个双向螺纹杆的外表面螺纹连接,两组所述驱动块二的底面均与限位槽的上表面固定连接,且每组传送导轨的下部均位于限位槽的
凹槽内部。
9.进一步的,所述监测机构包括框架,且框架的底面与平台主体的上表面固定连接,所述框架的上表面固定连接有数控模组,所述框架的内顶壁固定连接有旋转轴,所述旋转轴的内部通过销轴铰接有探头。
10.进一步的,所述限位槽的上表面固定连接有两个支撑架,两个所述支撑架的内部固定连接有百褶布。
11.进一步的,所述框架的外表面固定连接有导线管,所述导线管的左端与旋转电机一和旋转电机二固定连接,所述导线管的右端与数控模组固定连接。
12.有益效果:
13.与现有技术相比,该适用于多车型的雪橇检具机构具备如下有益效果:
14.本实用新型通过设置升降机构,能对雪橇板的垂直高度进行调整,通过设置平移机构,能对雪橇板的横向间距进行调整,同时通过设置监测机构,能对雪橇板的间距参数或雪橇板之上的附属部件进行扫描,并通过操控旋转电机一和旋转电机二,对雪橇板的高度和间距进行实时调整,实现了雪橇板的自我检测。
附图说明
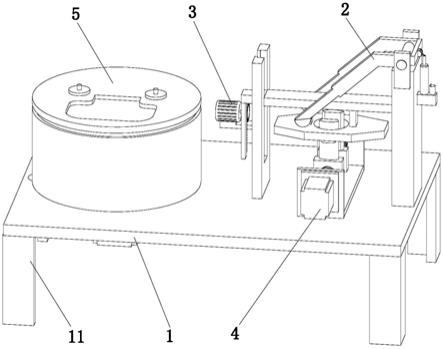
15.图1为本实用新型正式示意图;
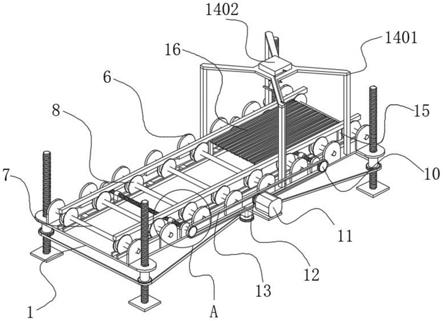
16.图2为本实用新型仰视示意图;
17.图3为本实用新型图1中a处结构放大示意图;
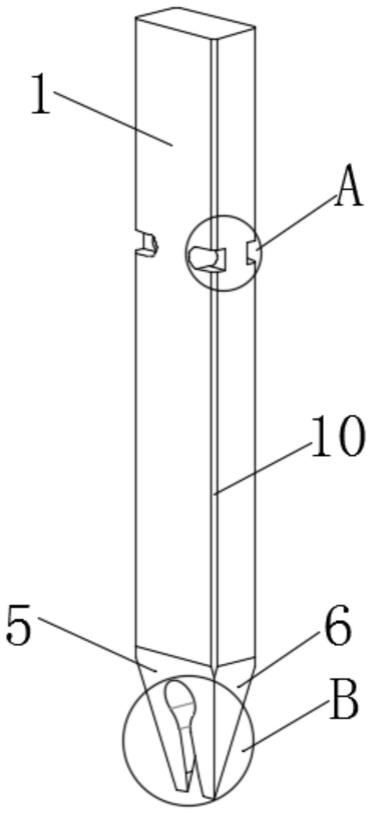
18.图4为本实用新型图2中b处结构放大示意图。
19.图中:1平台主体、2升降机构、201底座、202单向螺纹杆、203驱动块一、204从动轮一、3旋转电机一、4主动轮一、5链条一、6固定板组一、7轴承、8传送导轨、9雪橇板、10平移机构、1001固定板组二、1002双向螺纹杆、1003从动轮二、1004驱动块二、1005限位槽、11旋转电机二、12主动轮二、13链条二、14监测机构、1401框架、1402数控模组、1403旋转轴、1404探头、15支撑架、16百褶布、17导线管。
具体实施方式
20.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
21.本实用新型提供一种技术方案:一种能够根据车架不同形状自动调整的雪橇检具机构,该机构能够通过改变雪橇的纵向高度和横向宽度该适用于不同车型,极大地提高了设备与车辆生产线的兼容性,降低了生产资金投入。
22.参见图1、图2和图4,一种能够根据车架不同形状自动调整的雪橇检具机构,平台主体1的下方设置有四个升降机构2,可通过对升降机构2的调节来驱动平台主体1上升或下降。
23.本实施例中,升降机构2包括四个底座201,四个底座201的上表面均固定连接有单向螺纹杆202,且四个单向螺纹杆202的上表面均贯穿平台主体1的底面并延伸至平台主体1的上部,四个单向螺纹杆202的外表面均螺纹连接有驱动块一203,且四个驱动块一203均位于平台主体1的下方,四个驱动块一203的底面均固定连接有从动轮一204,且四个从动轮一
204均通过链条一5与主动轮一4传动连接。
24.即通过驱动从动轮一204,使驱动块一203转动,由于驱动块一203和单向螺纹杆202为螺纹连接,底座201固定于底面,所以驱动块一203旋转的同时会上升,带动平台主体1向上运动,实现设备的垂直方向上升。
25.参见图2,平台主体1的底面固定连接有旋转电机一3,旋转电机一3的输出转轴固定连接有主动轮一4,平台主体1的下方设置有链条一5,即可以通过旋转电机一3对升降机构2提供动力加持,同时利用主动轮一4和链条一5带动从动轮一204驱动驱动块一203。
26.参见图1和图3,平台主体1的上表面固定连接有八组等距离排列的固定板组一6,每组固定板组一6的内部均转动连接有轴承7,每个轴承7的外表面均转动连接有一组传送导轨8,两个传送导轨8之间的距离并不固定,平台主体1的上方设置有两个雪橇板9,且每组传送导轨8均与两个雪橇板9传动连接,此处传送导轨8主要为传送雪橇板9而设立的,为避免传送导轨8和雪橇板9之间打滑,传送导轨8和雪橇板9的接触面均刻有条形纹,来增大传送导轨8和雪橇板9之间的摩擦。
27.参见图1和图3,平台主体1的上表面固定连接有平移机构10,平移机构10能对相邻的传送导轨8之间的距离进行调整。
28.在这里,平移机构10包括两组固定板组二1001、两组驱动块二1004和一组限位槽1005,每组固定板组二1001内部均转动连接有双向螺纹杆1002,且两个双向螺纹杆1002的正面分别贯穿两组固定板组二1001并延伸至固定板组二1001的前方,两个双向螺纹杆1002的正面均固定连接有从动轮二1003。
29.进一步的,两个从动轮二1003均通过链条二13与主动轮二12传动连接,两组驱动块二1004分别与两个双向螺纹杆1002的外表面螺纹连接,两组驱动块二1004的底面均与限位槽1005的上表面固定连接,且每组传送导轨8的下部均位于限位槽1005的凹槽内部。
30.即通过操作从动轮二1003,便可带动双向螺纹杆1002旋转,从而使两个限位槽1005相互远离或靠近,实现对雪橇板9的间距调整。
31.参见图1,平台主体1的正面固定连接有旋转电机二11,旋转电机二11的输出转轴固定连接有主动轮二12,平台主体1的前方设置有链条二13,旋转电机二11驱动主动轮二12利用链条二13便可带动平移机构10运作,对平移机构10提供动力。
32.参见图1和图2,平台主体1的上表面固定连接有监测机构14,监测机构14能对雪橇板9进行扫描,并通过旋转电机一3和旋转电机二11对升降机构2和平移机构10进行控制
33.更具体的,监测机构14包括框架1401,且框架1401的底面与平台主体1的上表面固定连接,框架1401的上表面固定连接有数控模组1402,框架1401的内顶壁固定连接有旋转轴1403,旋转轴1403的内部通过销轴铰接有探头1404,通过设置旋转轴1403,能够使探头1404实现全方位旋转,使探头1404的观察范围较广,提高设备的灵敏性。
34.进一步的,框架1401的外表面固定连接有导线管17,导线管17的左端与旋转电机一3和旋转电机二11固定连接,导线管17的右端与数控模组1402固定连接,能够对导线管17内部的导线进行保护,避免数控模组1402不能及时控制旋转电机一3或旋转电机二11。
35.同时,限位槽1005的上表面固定连接有两个支撑架15,两个支撑架15的内部固定连接有百褶布16,能够对探头1404之下的非雪橇板9的范围进行覆盖,防止探头1404观察到其他数据导致对雪橇板9的误判。
36.工作原理:首先将四个底座201固定于地面之上,之后开启设备,对数控模组1402进行参数调整,并开启探头1404,对平台主体1之上的雪橇板9进行观察,若雪橇板9不符合参数要求,探头1404便将信号传输至数控模组1402之中,数控模组1402便会通过旋转电机一3或旋转电机二11对雪橇板9进行调整,若是雪橇板9的高度参数不对,探头1404便会操控旋转电机一3旋转,旋转电机一3通过主动轮一4和链条一5带动驱动块一203和从动轮一204旋转,从动轮一204在单向螺纹杆202之上旋转时会上升或下降,实现对平台主体1和雪橇板9的高度调整,若雪橇板9之间的间距参数不对,数控模组1402便会操控旋转电机二11旋转,旋转电机二11通过主动轮二12和链条二13带动双向螺纹杆1002和从动轮二1003旋转,由于从动轮二1003为双向结构,所以从动轮二1003在旋转时驱动块二1004和限位槽1005便会靠近或远离,实现对雪橇板9的横向间距调整,实现对雪橇板9的实施调控。
37.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。