1.本实用新型涉及直流电机组件。本实用新型还涉及包括直流电机组件的升降执行器和包括升降执行器的跑步机。
背景技术:
2.近年来,随着跑步机等健身器材的发展,对跑步机的升降执行器的要求也在进一步提高。例如在vr等技术的成功应用下,已诞生出可预设跑步路线的跑步机。这种跑步机在使用过程中根据预设情况能连续调整坡度,从而模拟实际路况。
3.传统的跑步机升降执行器所用电机为单向异步电容启动式交流电机。这种升降执行器能够满足传统跑步机单一升到定点坡度后停止的功能需求。然而,这种传统升降执行器在需要连续调整跑步机坡度时运行效率低下 (10
‑
20%),发热严重无法连续使用,无法满足新兴的客户需求。
4.另外,现有的升降执行器采用交流电机,其壳体采用铸铝或锌合金材质,需要额外机壳接地,确保升降执行器使用安全性,防止在绕组基本绝缘失效时引起的触电危险。
5.还有一种跑步机升降执行器所用电机为直流有刷电机,该方案可以改善电机运行效率。但在目前跑步机的主控制器输出为交流输出线路,其适于与交流电机匹配,而无法直接匹配直流电机。为配套现有的跑步机主驱动器,该直流有刷电机方案需要额外增加一块外置驱动器,其上外置整流降压功能配套使用。该外置驱动器还需要额外从跑步机主驱动器上接收对应的正反转信号,从而控制升降执行器实现升降功能。这种方案需要配套修改跑步机主控制器的上层硬件和软件设计,综合成本高,且占用空间大。
6.此外,采用直流有刷电机的方案存在电机输出转速随负载变化波动的问题,其无法实现在不同负载下直线升降速度的动态调整。
7.因此,需要一种改进的跑步机升降执行器的驱动电机方案,其能够至少部分地克服现有技术中的缺陷。
技术实现要素:
8.本实用新型旨在克服现有技术中的上述问题的至少一些。
9.根据本实用新型的一个方面,提供了一种直流电机组件,包括:直流电机,所述直流电机包括轴线和沿所述轴线设置的输出旋转轴,所述直流电机还包括连接至所述输出旋转轴并与所述输出旋转轴一起旋转的磁体;
10.转速检测板,所述转速检测板设置有用于检测所述磁体的磁场并提供指示磁场强度的电信号的感应元件,所述感应元件设置在所述磁体附近;直流电机驱动板,所述直流电机驱动板包括用于控制提供给所述直流电机的驱动电流的控制器,所述控制器与所述转速检测板上的感应元件电连接并从所述感应元件接收所述电信号,其中所述转速检测板设置成基本垂直于所述直流电机的轴线并且所述直流电机驱动板设置成基本平行于所述直流电机的轴线。
11.根据本实用新型的一些实施例,所述直流电机驱动板具有第一边缘和与所述第一边缘相邻的一排焊盘且所述转速检测板具有第二边缘和与所述第二边缘相邻的一排焊盘,所述第一边缘和所述第二边缘相邻地设置,所述直流电机组件还包括将所述直流电机驱动板的所述一排焊盘的至少一些焊盘与所述转速检测板的所述一排焊盘中的至少一些焊盘电连接的一排针。
12.根据本实用新型的一些实施例,所述转速检测板设置在所述直流电机的一端,除了所述第二边缘,所述转速检测板基本不超出直流电机的轮廓范围,所述直流电机驱动板与直流电机相邻近,在轴向上从直流电机的所述一端朝向另一端延伸,并且基本不超出直流电机的轴向范围。根据本实用新型的一些实施例,所述直流电机组件还包括电机壳体,所述壳体限定被一公共壁隔开的两个腔室,所述两个腔室中的一个用于容纳所述直流电机,所述两个腔室中的另一个用于容纳所述直流电机驱动板。
13.根据本实用新型的一些实施例,所述电机壳体是塑料制成的。
14.根据本实用新型的一些实施例,所述感应元件是霍尔元件。
15.根据本实用新型的一些实施例,所述直流电机驱动板包括用于将交流电转换成用于驱动所述直流电机的直流电的整流电路。
16.根据本实用新型的一些实施例,所述转速检测板设置有两个端子焊盘,所述两个端子焊盘与所述直流电机的两端子电连接。
17.根据本实用新型的一些实施例,所述直流电机驱动板的所述驱动电流通过所述直流电机驱动板的内部线路、所述排针、所述转速检测板的内部线路和所述直流电机的端子而输送到所述直流电机。
18.根据本实用新型的一些实施例,所述输出旋转轴包括在所述直流电机的第一端的第一输出旋转轴和在所述直流电机的第二端的第二输出旋转轴,所述第一输出旋转轴用于输出旋转动力且所述磁体连接至所述第二输出旋转轴。
19.根据本实用新型的一些实施例,所述磁体是干涉配合至第二输出旋转轴的磁环。
20.根据本实用新型的另一方面,提供了一种升降执行器,包括如上所述的直流电机组件和升降执行机械结构,所述升降执行机械结构包括丝杠升降结构和传动结构,所述传动结构包括塑料制成的齿轮系,用于将所述直流电机的动力输出传递到所述丝杠升降结构。
21.根据本实用新型的一些实施例,所述丝杠升降结构包括外管和设置在所述外管内的丝杠和丝母,所述丝杠的顶部设置有塑料限位螺母。
22.根据本实用新型的一些实施例,所述升降执行器还包括微动开关,所述外管设置有窗口,所述微动开关的致动臂从所述外管的所述窗口伸入到所述外管内。
23.根据本实用新型的另一方面,提供了一种跑步机,所述跑步机包括如上所述的升降执行器。
附图说明
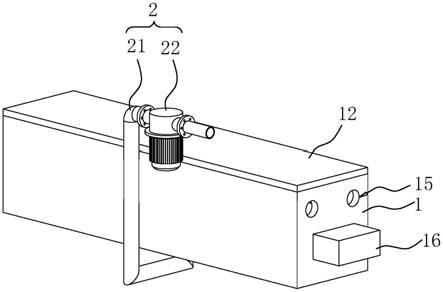
24.图1a和1b示出了根据本实用新型的一些实施例的跑步机升降执行器。
25.图2a
‑
2b示出了直流电机和转速检测装置。
26.图3a
‑
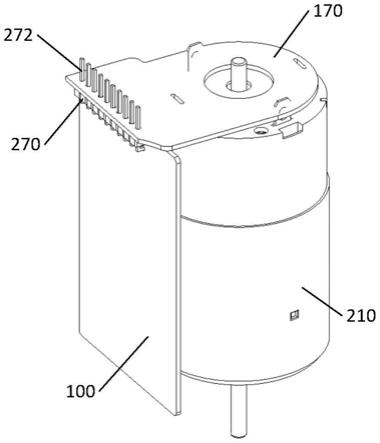
3b示出了直流电机、转速检测装置和直流电机驱动装置。
27.图3c和图3d分别示出了直流电机驱动装置和转速检测装置。
28.图4示出了根据本实用新型的一些实施例的跑步机升降执行器的传动部分的视图。
29.图5a
‑
5c示出了根据本实用新型的一些实施例的上壳体。
30.图6a
‑
6b示出了根据本实用新型的一些实施例的下壳体。
31.图7a
‑
7d示出了根据本实用新型的一些实施例的丝杠结构及其与上壳体和直流电机组件的装配。
32.图8a和8b示出了根据本实用新型的一些实施例的跑步机升降执行器的框图。
33.图9示出了根据本实用新型的一些实施例的整流模块和自动识别模块的电路图。
34.图10a和图10b示出了根据本实用新型的一些实施例的降压模块。
35.图11示出了根据本实用新型的一些实施例的控制器。
36.图12示出了根据本实用新型的一些实施例的直流电机驱动模块。
37.图13示出了根据本实用新型的一些实施例的直流电机驱动装置的操作流程。
具体实施方式
38.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
39.除非另作定义,此处使用的技术术语或者科学术语应当为本实用新型所属领域内具有一般技能的人士所理解的通常意义。在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
40.图1a和1b示出了根据本实用新型的一些实施例的跑步机升降执行器 10,其中图1a是跑步机升降执行器10的组装图,而图1b是跑步机升降执行器10的部分拆解图,以更清楚地示出内部部件。跑步机升降执行器10包括直流电机组件200和升降执行机械结构300。直流电机组件200包括直流电机210、直流电机驱动装置100和转速检测装置170。在如图所示的实施例中,直流电机驱动装置100和转速检测装置170是pcb电路板的形式。然而本实用新型不限于此,在本实用新型的可选实施例中,直流电机驱动装置100和转速检测装置170可以是任何合适的形式。直流电机组件200包括电机壳体250和安装在电机壳体250内的直流电机210、直流电机驱动装置 100、转速检测装置170。电机壳体包括电机上壳体252和电机下壳体254。电机上壳体252和电机下壳体限定两个腔室,即电机腔室256和电机驱动装置腔室258(参见图5a),用于分别容纳直流电机210和直流电机驱动装置 100。
41.图2a
‑
2b示出了直流电机210和转速检测装置170,其中图2a是组装图,图2b是分解图。图3a
‑
3b示出了直流电机210、转速检测装置170和直流电机驱动装置100,其中图3a是组装立体图,图3b是侧视图。图3c 和图3d分别示出了直流电机驱动装置100和转速检测装置
170。如图所示,直流电机驱动装置100和转速检测装置170均是pcb板的形式,因此下文中也称为直流电机驱动板100和转速检测板170。
42.如图所示,直流电机210包括直流电机本体、沿着直流电机本体的轴线分别设置在直流电机本体的第一端和第二端的第一输出旋转轴212和第二输出旋转轴214。直流电机210还包括固定至第二输出旋转轴(例如通过干涉配合)并与第二输出旋转轴一起旋转的磁环216。直流电机210还包括设置在直流电机本体的第二端的两个端子218a、218b,用于输入驱动电流。直流电机210的第一输出旋转轴212上设置有第一齿轮222。
43.转速检测板170包括通孔176、设置在通孔176附近的霍尔元件172、连接器174、两个端子焊盘178a、178b和在一侧边缘附近的一排焊盘182。转速检测板170安装在直流电机210的第二端,转速检测板170基本垂直于直流电机的第一和第二输出旋转轴212、214,即垂直于直流电机的轴线,其中直流电机210的第二输出旋转轴214从转速检测板170的通孔176穿过,并且端子218a和218b分别从端子焊盘178a、178b伸出并焊接到端子焊盘 178a、178b。当直流电机210运转时,第二输出旋转轴214与磁环216一起旋转。通孔176附近的霍尔元件172感测磁环216的磁场变化,产生表示直流电机210的转速的电信号。转速检测板170的连接器174用于连接至微动开关(下文中说明)。
44.直流电机驱动板100包括在一侧边缘附近的一排焊盘。如图3a和3b 所示,直流电机驱动板100的设置有一排焊盘的侧边缘与转速检测板170的设置有一排焊盘182的侧边缘相邻,使得直流电机驱动板100的一排焊盘与转速检测板170的一排焊盘182相邻近。一排针元件270通过转速检测板170 的一排焊盘182和直流电机驱动板100的一排焊盘将转速检测板170与直流电机驱动板100连接在一起,并且将转速检测板170的内部电路与直流电机驱动板100的内部电路电连接在一起。如图所示,排针元件270的每个管脚 272呈“l”形,每个管脚272的“l”形的一个腿插入并焊接至转速检测板170 的一排焊盘182中的一个焊盘,另一个腿插入并焊接至直流电机驱动板100 的一排焊盘中的相应一个焊盘。如图所示,转速检测板170基本垂直于直流电机的第一和第二输出旋转轴212、214,即垂直于直流电机的轴线,而直流电机驱动板100基本平行于直流电机的第一和第二输出旋转轴212、214,即平行于直流电机的轴线,并且在从直流电机210的第二端向第一端的方向上延伸。通过以上布置,转速检测板170大致设置在直流电机210的第二端,并且平行于且邻近于直流电机210第二端的端面。并且除了在设置有一排焊盘182的一侧边缘,转速检测板170基本不超出直流电机210的轮廓范围。直流电机驱动板100与直流电机210相邻近,从转速检测板170,在轴向上基本从直流电机210的第二端到第一端,并且其在轴向范围内基本不超出直流电机210的轴向范围,其宽度也不超出直流电机210的轮廓范围。因此,包括直流电机210、转速检测板170和直流电机驱动板100的直流电机组件能实现整体结构的小型化紧凑设计。如图1b和图5a所示,电机下壳体限定由一公共壁隔开的两个腔室,即电机腔室256和电机驱动装置腔室258,用于分别容纳直流电机210和直流电机驱动板100。这实现了一种非常紧凑的结构,并能充分利用齿轮箱体上侧的空间。这里的“基本垂直”或“基本平行”指的是可以不严格是垂直或平行关系,例如与严格垂直或平行关系相差
±5°
、
±8°
或
±
10
°
。这里的“基本不超出直流电机的轮廓范围”是指在直流电机的轮廓范围内或者仅仅稍微超出,例如仅超出5%。这里的“基本不超出直流电机的轴向范围”指在直流电机的轴向范围或者仅仅稍微超出,例如仅超出5%。
45.图4示出了根据本实用新型的一些实施例的跑步机升降执行器10的传动部分的视图。如图所示,传动部分包括上壳体320、下壳体340,以及安装在上壳体320、下壳体340之间的齿轮传动系360。齿轮传动系360包括二轮362,三轮364,四轮366和五轮368。二轮362,三轮364,四轮366 中的每个包括设置在同一旋转轴上一起旋转的大小两个齿轮。二轮362的大齿轮与直流电机210的第一齿轮222相啮合,二轮362的小齿轮与三轮364 的大齿轮相啮合,三轮364的小齿轮与四轮366的大齿轮相啮合,四轮366 的小齿轮与五轮368相啮合。当直流电机210运转时,第一齿轮222、二轮 362,三轮364,四轮366和五轮368的旋转速度逐级递减。在图示的实施例中,上壳体320、下壳体340和齿轮均由塑料形成。在本实用新型的一些实施例中,上壳体320、下壳体340也由塑料形成。
46.图4示出了根据本实用新型的一些实施例的传动部分的具体配置,然而本实用新型不限于此。在本实用新型的另一些实施例中,传动部分可以包括不同的齿轮配置,或者包括不同于齿轮的传动部件,例如皮带轮传动部件,链轮传动部件等。如图4和图1b所示,在本实用新型的一些实施例中,上壳体320与电机下壳体254一体成型,然而本实用新型不限于此。在根据本实用新型的另一些实施例中,上壳体320与电机下壳体254可以分开形成,并通过合适的连接装置连接在一起。在本实用新型的一些实施例中,上壳体 320、下壳体340和齿轮均由塑料形成,然而本实用新型不限于此。在根据本实用新型的另一些实施例中,上壳体320、下壳体340和齿轮可以由金属制成。
47.图5a
‑
5c示出了根据本实用新型的一些实施例的上壳体320。上壳体320 包括通孔322和332,通孔322用于接纳直流电机210的第一输出旋转轴212 延伸通过,且通孔332用于接纳丝杠(下文中说明)延伸通过。通孔332周围设有四条放射状独立加强筋,每个加强筋上有一个自攻螺纹孔336,用于将丝杠外管(下文中说明)固定连接至上壳体320。上壳体320在内侧还包括二轮上承窝324、三轮上承窝326、四轮上承窝328,用于分别支撑二轮 362,三轮364,四轮366的旋转轴的上端。上壳体320在内侧还包括围绕通孔332的环形承窝332a,用于设置轴承。上壳体320在内侧还包括纵横交错的加强筋结构336,用于提高上壳体320的结构强度。上壳体320还包括围绕上壳体320的周边的安装面凹槽339,用于与下壳体340上的对应结构配合。上壳体320还包括若干个壳体自攻螺纹孔338(在图示的实施例中是6 个壳体自攻螺纹孔338),用于通过自攻螺钉与下壳体340上的对应自攻螺纹孔连接。
48.图6a
‑
6b示出了根据本实用新型的一些实施例的下壳体340。下壳体340 包括通孔352,通孔352用于接纳丝杠(下文中说明)延伸通过。下壳体340 在内侧包括二轮下承窝344、三轮下承窝346、四轮下承窝348,用于分别支撑二轮362,三轮364,四轮366的旋转轴的下端。下壳体340在内侧还包括在通孔352附近的环形承窝352a,用于设置轴承。下壳体340在内侧还包括纵横交错的加强筋结构361,用于提高下壳体340的结构强度。下壳体340 还包括围绕下壳体340的周边的安装面凸台363,用于与上壳体320上的安装面凹槽339配合。下壳体340还包括若干个壳体自攻螺纹孔358(在图示的实施例中是6个壳体自攻螺纹孔358),用于通过自攻螺钉与上壳体320 上的对应自攻螺纹孔338连接。如图6b所示,二轮下承窝344、三轮下承窝346、四轮下承窝348均从下壳体340的背面突出,并在周围各设置有多个肋345、347、349用于提高结构强度。环形承窝352a也从下壳体340的背面突出,并在周围设置有多个肋353用于提高结构强度。
49.图7a
‑
7d示出了根据本实用新型的一些实施例的丝杠结构及其与上壳体320和直
流电机组件的装配。丝杠结构包括外管372、丝母374和丝杠382。外管372包括底座376。自攻螺钉通过底座376中的多个孔螺纹紧固到上壳体320的自攻螺纹孔338中,从而将外管372固定连接至上壳体320。丝母 374设置在外管372内,与五轮368固定连接或一体形成并一起旋转。丝母 374包括内螺纹,而丝杠382包括外螺纹。丝杠382设置在丝母374内,丝杠382的外螺纹与丝母374的内螺纹啮合。丝母374和五轮368的轴向位置通过上壳体320、下壳体340和可选的轴承等结构固定,因此丝母374只能进行旋转运动而无法在轴向上运动。丝杠382的圆周位置通过本领域中已知的方式被固定,因此丝杠382只能在轴向上运动而进行旋转运动。当丝母374 在五轮368的带动下旋转时,丝杠382由于丝母374的旋转运动方向而在轴向上向上或向下运动,从而实现跑步机升降执行器10的升降运动。
50.如图7a、7c、7d所示,外管372还包括还包括设置在其壁上的一窗口 378。电机壳体250上还设置有支撑架396。微动开关390设置在支撑架396 上,在外管372外部且与窗口378相邻。微动开关390包括致动臂392,致动臂392通过窗口378伸入到外管372内。丝杠382的顶部设置有塑料限位螺母384。丝杠382在外管内在轴向上移动而碰到微动开关390的致动臂392 时,下压微动开关390,将常开微动开关置于闭合状态,微动开关390发出信号,指示丝杠382已经移动预定行程,即跑步机升降执行器已经升降预定行程。在根据本实用新型的一些实施例中,塑料限位螺母384由聚甲醛类材料形成。在根据本实用新型的另一些实施例中,该限位螺母也可改为塑料垫片 金属螺母的方案。在根据本实用新型的一些实施例中,升降执行器用于跑步机,然而本实用新型不限于此。根据本实用新型的一些可选实施例,升降执行器也可以用于动感单车等。
51.图8a示出了根据本实用新型的一些实施例的跑步机升降执行器的框图。其中虚线部分是直流电机驱动装置100,其包括交流电输入部110,整流模块120、降压模块130、控制器140、自动识别模块150、直流电机驱动模块160。直流电机组件包括直流电机驱动装置、直流电机210和转速检测装置170。跑步机升降执行器包括直流电机组件和升降执行机械结构300。
52.交流电输入部110具有第一输入部和第二输入部,其分别适于连接至跑步机的主控制器的正转交流输出线路和反转交流输出线路。例如,常规跑步机的主控制器的升降执行器输出线路通常包括三根交流供电线,一根是正转交流供电线,一根是反转交流供电线,一根是公共线。在需要升降机执行器的电机正转时,正转交流供电线和公共线通电,在需要升降机执行器的电机反转时,反转交流供电线和公共线通电。此时,交流电输入部110相应地具有三个交流输入接口,用于分别连接至三根交流供电线(连接至正转交流供电线和公共线的交流输入接口可被称为第一输入部,连接至反转交流供电线和公共线的交流输入接口可被称为第二输入部)。在跑步机的主控制器具有其它形式的正转交流输出线路和反转交流输出线路的情况下,本实用新型的交流电输入部110也可以具有对应的第一输入部和第二输入部,以能分别连接至跑步机的主控制器的正转交流输出线路和反转交流输出线路。
53.整流模块120被配置成电连接到交流电输入部110,并对从所述交流电输入部110输入的交流电进行整流,以生成经整流的电流。降压模块130和直流电机驱动模块160电连接到整流模块120,以接收来自整流模块的经整流的电流。降压模块130将来自整流模块的电流降压,以使其电压能用于控制器140,例如为控制器140供能。直流电机驱动模块160利
用来自整流模块120的电流,用于驱动直流电机210的旋转。自动识别模块160电连接到交流电输入部110,并自动识别正转交流输出线路和反转交流输出线路的通电状态并产生指示正转交流输入线路通电或反转交流输入线路通电的电信号。控制器140从自动识别模块160接收所述电信号,并产生用于控制直流电机驱动模块160的电信号。在一些实施例中,控制器140产生的用于控制直流电机驱动模块160的电信号包括pwm信号。直流电机驱动模块160根据来自控制器140的电信号,利用来自整流模块120的电流来驱动直流电机 210正向或反向旋转。直流电机210的正向旋转或反向旋转进而驱动升降执行机械结构300的上升或下降操作。转速检测装置170检测直流电机210的旋转,并产生表示直流电机210的转速的电信号。控制器140根据转速检测装置170的电信号控制pwm的占空比,以调整直流电机210的转速。
54.图8b示出了根据本实用新型的可选实施例的跑步机升降执行器的框图。其中虚线部分是直流电机驱动装置100,其包括交流电输入部110,整流模块120、自动识别模块150、直流电机驱动模块160。直流电机组件包括直流电机驱动装置100和直流电机210。跑步机升降执行器包括直流电机组件和升降执行机械结构300。与图8a的实施例相比,图8b的实施例省略了降压模块130和控制器140。即在图8a的实施例中,控制器140从自动识别模块160接收指示正转交流输入线路通电或反转交流输入线路通电的电信号,并产生用于控制直流电机驱动模块160的电信号,例如pwm信号。而在图8b的实施例中,直流电机驱动模块160直接电连接到自动识别模块160,并且自动识别模块160的输出直接用于控制直流电机驱动模块160的操作。即,直流电机驱动模块160根据来自自动识别模块160的电信号,利用来自整流模块120的电流来驱动直流电机210正向或反向旋转。
55.图8a和图8b示出了根据本实用新型的一些实施例的框图,然而本实用新型不限于此。例如,在本实用新型的其它可选实施例中,可以省略图8a 中的降压模块130,并且控制器140可以使用其它电源供电。该其它电源可以是来自跑步机的主控制器或者是跑步机升降执行器的内置电池。
56.图9示出了根据本实用新型的一些实施例的整流模块120和自动识别模块150的电路图。如图所示,整流模块120包括三个输入端ac_fwd、 ac_com和ac_rev。输入端ac_fwd、ac_com和ac_rev分别与跑步机的主控制器的正转交流供电线、公共线和反转交流供电线电连接。输入端ac_fwd和输入端ac_com之间通正转交流电流,输入端ac_rev和输入端ac_com之间通反转交流电流。
57.整流模块120包括第一整流模块部分120’和第二整流模块部分120”。自动识别模块150包括第一自动识别模块部分150’和第二自动识别模块部分 150”。第一整流模块部分120’包括由四个二极管组成的整流桥d2。整流桥d2的四端分别电连接至输入端ac_fwd、ac_com、接地gnd和整流模块输出端310v 。在整流桥d2的输入端ac_fwd和输入端ac_com之间通正转交流电流(正转工况)时,整流桥d2的输出端310v 输出经整流的直流电输出。第一自动识别模块部分150’包括光电耦合元件u2。光电耦合元件u2的输入端通过电阻r4和r6连接到输入端ac_fwd,光电耦合元件u2的输出信号为正转信号fwd_s。在输入端ac_fwd和输入端 ac_com之间通正转交流电流(正转工况)时,光电耦合元件u2间歇性导通,使得光电耦合元件u2的输出信号fwd_s不断在上拉的3.3v和gnd 之间跳跃,产生与交流电频率相同的脉冲信号。光电耦合元件u2的输出信号fwd_s输出到控制器140或者自动识别模块160,用于控制
电机210进行正向旋转。
58.第二整流模块部分120”和第二自动识别模块部分150”分别用于对输入端ac_rev和ac_com之间的反转交流电流进行整流和自动识别。第二整流模块部分120”和第二自动识别模块部分150”的操作与第一整流模块部分 120’和第一自动识别模块部分150’基本相同,在此不再赘述。图9中的二极管d4和d5用于防止两整流桥导通后互相干扰,起到反向截止的作用。
59.在如图9所示的实施例中,第一自动识别模块部分150’的输入端电连接至输入端ac_fwd,而第二自动识别模块部分150”的输入端电连接至整流桥d3的输出端。然而本实用新型不限于此,在本实用新型的另一些实施例中,第一自动识别模块部分150’的输入端与ac_fwd电连接,并且第二自动识别模块部分150”的输入端与ac_rev电连接。在本实用新型的另一些实施例中,第一自动识别模块部分150’的输入端与整流桥d2的输出端电连接,并且第二自动识别模块部分150”的输入端与整流桥d3的输出端电连接。在本实用新型的另一些实施例中,第一自动识别模块部分150’的输入端与整流桥d2的输出端电连接,并且第二自动识别模块部分150”的输入端与 ac_rev电连接。
60.图9示出了根据本实用新型的一些实施例的整流模块120的具体电路,然而本实用新型不限于此。在根据本实用新型的可选实施例中,整流模块120 可以包括任何合适的整流电路。图9示出了根据本实用新型的一些实施例的自动识别模块150的具体电路,然而本实用新型不限于此。在根据本实用新型的可选实施例中,自动识别模块可以包括任何合适的自动识别电路。例如图9所示的实施例中,自动识别模块包括光电耦合元件,用于交流电输入 (ac_fwd和ac_rev)与弱电(fwd_s和rev_s)之间的耦合与隔离。然而本实用新型不限于此,本实用新型的可选实施例可以包括不同于图9所示的光电耦合元件的其它耦合元件,例如磁电耦合元件。
61.图10a和图10b示出了根据本实用新型的一些实施例的降压模块130。降压模块130包括第一降压模块部分130’和第二降压模块部分130”。第一降压模块部分130’包括第一降压芯片u6,第一降压模块部分130’从整流模块120接收310v 直流电流,并对接收的直流电流进行降压,以输出12v直流电。第二降压模块部分130”包括第二降压芯片u3,第二降压模块部分130”将从第一降压模块部分130’输出的12v直流电进行降压,以输出3.3v直流电。第一降压模块部分130’输出的12v直流电可用直流电机驱动模块160,第二降压模块部分130”输出的3.3v直流电可用于对各芯片进行供能。在根据本实用新型的一些实施例中,直流电机210是永磁直流有刷电机,在根据本实用新型的另一些实施例中,直流电机210可以是任何合适的直流电机。
62.图10a和图10b示出了根据本实用新型的一些实施例的降压模块的具体电路,然而本实用新型不限于此。在本实用新型的可选实施例中,降压模块可以包括任何合适的电路。
63.图11示出了根据本实用新型的一些实施例的控制器140。控制器140 包括控制芯片u1(在图示的实施例中是mcu)。控制芯片u1的输入信号包括霍尔信号hall_s、微动开关信号zero_s、正转信号fwd_s和反转信号rev_s,输出信号包括信号left_hi、left_li、right_hi和right_li。在根据本实用新型的一些实施例中,信号left_hi和right_hi是pwm 信号。
64.在图11所示的实施例中,本实用新型的控制器140是mcu,然而本实用新型不限于此。在本实用新型的可选实施例中,控制器140可以是任何合适的处理器。
65.图12示出了根据本实用新型的一些实施例的直流电机驱动模块160。如图所示,直流电机驱动模块160包括h桥驱动模块部分160’和两个半桥驱动模块部分162、164。h桥驱动模块部分160’包括四个mos管q3、q4、 q5和q6。半桥驱动模块部分162包括半桥驱动芯片u5。半桥驱动芯片u5 的输入信号是来自控制器140的信号left_hi和left_li,并根据信号left_hi和left_li输出信号left_ho和left_lo。信号left_ho和 left_lo分别用于驱动h桥驱动模块部分160’的mos管q3、q5。半桥驱动芯片u5的输出信号left_ho和left_lo分别与输入信号left_hi和 left_li的波形相同,区别在于信号left_ho和left_lo的电压和电流能够用于驱动h桥驱动模块部分160’的mos管q3、q5。类似地,半桥驱动模块部分164包括半桥驱动芯片u4。半桥驱动芯片u4的输入信号是来自控制器140的信号right_hi和right_li,并根据信号right_hi和 right_li输出信号right_ho和right_lo。信号right_ho和 right_lo分别用于驱动h桥驱动模块部分160’的mos管q4、q6。半桥驱动芯片u4的输出信号right_ho和right_lo分别与输入信号 right_hi和right_li的波形相同,区别在于信号right_ho和 right_lo的电压和电流能够用于驱动h桥驱动模块部分160’的mos管 q4、q6。h桥驱动模块部分160’的输出端m_neg和m_pos与直流电机的两个输入端相连。当q4和q5导通时,h桥驱动模块部分160’的电流从 m_pos流向m_neg,直流电机正转。当q3和q6导通时,电流从m_neg 流向m_pos,直流电机反转。
66.h桥驱动模块部分160’的节点current_sample与控制器140的 adc采样引脚相连接。控制器140通过adc采样引脚接收节点 current_sample的电压值,并根据电压值计算出当前直流电机的工作电流。
67.在图9、图10a
‑
10b、图11
‑
12所示的实施例中,直流电机驱动装置的输入是220v交流电,整流模块120的输出是310v直流电,第一降压模块部分的输出是12v直流电,并且第二降压模块部分的输出是3.3v直流电,然而本实用新型不限于此。在本实用新型的可选实施例中,直流电机驱动装置的输入可以是不同于220v的其它电压的交流电,例如110v的交流电。此时整流模块120的输出直流电压也会相应地改变。在可选实施例中,第一降压模块部分的输出直流电可以是不同于12v的任何其它合适电压,并且第二降压模块部分的输出直流电可以是不同于3.3v的任何其它合适电压。
68.图13示出了根据本实用新型的一些实施例的直流电机驱动装置的操作流程图。在步骤s01,跑步机的主控制器的正转或反转交流线路供电,直流电机驱动装置上电。在步骤s02,直流电机驱动装置的整流模块120和降压模块130工作,对来自跑步机的主控制器的交流电进行整流和降压,得到整流降压后的直流电,并向控制器140供电,控制器140上电初始化。在步骤 s03,控制器140通过来自自动识别模块150的电信号,判断跑步机的主控制器的正转线路供电还是反转交流线路供电。当控制器140判断是正转线路供电,则接下来进行s04步骤。如果是反转线路供电,则接下来进行s04’步骤。
69.在s04步骤,控制器140控制向mos管q5的栅极提供高电平信号,并且给mos管q4的栅极提供pwm信号。此时pwm信号的占空比较低,因此电机软启动,驱动跑步机升降执行器缓慢上升。在s05步骤,控制器 140逐渐增加pwm信号的占空比,直至达到预定的占空比或者最大可达占空比。在步骤s06,控制器140通过转速检测装置170获得电机的转速信号,并根据所获得的转速信号判断电机是否转速过高、转速过低或者转速合适。如果电机转速合适,则接下来直接进行s09步骤;如果电机转速过低,则先进行s07步骤,然后再进行s09步骤;如果
电机转速过高,则先进行s08步骤,然后再进行s09步骤。在s07步骤,控制器140提高提供给mos管q4 的栅极的pwm信号的占空比。在s08步骤,控制器140降低提供给mos 管q4的栅极的pwm信号的占空比。在s09步骤,控制器140判断跑步机升降执行器是否已达到预定行程(例如通过对来自转速检测装置170的输入信号进行计算而得到)。如果已经达到预定行程,则进行s10步骤;如果还没有达到预定行程,则返回到s06步骤。在s10步骤,控制器140使mos 管q3和q4关闭,并使mos管q5和q6导通。此时电机两输入端均接地,电机停机。在步骤s11,跑步机的主控制器的交流线路断电,跑步机升降执行器停机。
70.在s04’步骤,控制器140控制向mos管q6的栅极提供高电平信号,并且给mos管q3的栅极提供pwm信号。此时pwm信号的占空比低(低于s04的pwm占空比),因此电机软启动,驱动跑步机升降执行器缓慢下降。在s05’步骤,控制器140逐渐增加pwm信号的占空比,直至达到预定的占空比。在步骤s06’,控制器140通过转速检测装置170获得电机的转速信号,并根据所获得的转速信号判断电机是否转速过高、转速过低或者转速合适。如果电机转速合适,则接下来直接进行s09’步骤;如果电机转速过低,则先进行s07’步骤,然后再进行s09’步骤;如果电机转速过高,则先进行s08’步骤,然后再进行s09’步骤。在s07’步骤,控制器140提高提供给mos 管q3的栅极的pwm信号的占空比。在s08’步骤,控制器140降低提供给 mos管q3的栅极的pwm信号的占空比。在s09’步骤,控制器140检测微动开关(具体下文中描述)是否动作。如果微动开关动作,则进行s10’步骤;如果微动开关没有动作,则返回到s06’步骤。在s10’步骤,控制器140使 mos管q3和q4关闭,并使mos管q5和q6导通。此时电机两输入端均接地,电机停机。在步骤s11,跑步机的主控制器的交流线路断电,跑步机升降执行器停机。
71.在图13所示的实施例中,正转线路上电时,跑步机升降执行器上升,且反转线路上电时,跑步机升降执行器下降。本实用新型不限于此,并且可选实施例中,正转线路上电时,跑步机升降执行器下降,且反转线路上电时,跑步机升降执行器上升。在图13所示的实施例中,包括s05和s05’步骤。本实用新型不限于此,在可选实施例中,可以不包括s05和/或s05’步骤。即,在跑步机升降执行器慢速启动后,跳过s05或s05’步骤,而直接利用 s06
‑
s08步骤或s06
’‑
s08’步骤来进行软启动。在另外的可选实施例中,s05 和/或s05’步骤可替代地可以是“逐步增加pwm占空比,直至达到预定电机转速”。确定是否达到预定电机转速的步骤可以类似于s06步骤或s06’步骤。在图13所示的实施例中,s09步骤判断是否达到预定行程,而s09’步骤判断微动开关是否动作。本实用新型不限于此,在可选实施例中,s09和s09’可以均判断是否达到预定行程,或者均判断微动开关是否动作。在另外的可选实施例中,s09步骤判断微动开关是否动作,而s09’步骤判断是否达到预定行程。
72.本实用新型的实施例具有以下技术优势中的至少一些:
73.1.在本实用新型中,采用了直流电机驱动板与转速检测板相互垂直布置的配置,其中转速检测板大致设置在直流电机的一端,基本平行于且邻近于直流电机该端的端面。除了设置有一排焊盘的侧边缘,转速检测板基本不超出直流电机的轮廓范围。直流电机驱动板与直流电机相邻近且垂直于转速检测板,从转速检测板,在轴向上基本从直流电机的第二端延伸到第一端,并且其在轴向范围内基本不超出直流电机的轴向范围,其宽度也不超出直流电机的轮廓范围。这实现电机组件的小型化紧凑设计。
74.2.电机下壳体限定由一公共壁隔开的两个腔室,即电机腔室和电机驱动装置腔室,用于分别容纳直流电机和直流电机驱动板。直流电机和直流电机驱动板一体集成在壳
体内的方案,增加整机的集成度,同时对于跑步机现有交流接口设计,该方案可以直接配套使用,无需变更跑步机主控制器设计。同时这实现了一种非常紧凑的结构,并能充分利用齿轮箱体上侧的空间。
75.3.本实用新型采用塑料壳体结构,直流电机和直流电机驱动板等通过塑料壳体密封,电机输出功率出通过塑料齿轮系传动,可以将高电压结构通过绝缘材料实现双重绝缘,无需机壳接地。同时小型化和高集成度带来的低成本方案可以与现有的交流电机方案相匹配,相比外置式驱动器的低压直流有刷电机方案,大大降低成本。
76.4.塑料限位螺母安装在丝杆顶部,在运行过程中螺母边缘会与外管内侧发生接触,由于聚甲醛类材料与金属碰撞声低沉且轻,可以有效改善运行过程中的异音,同时塑料限位螺母表面光滑,与外管接触后几乎无磨损等问题。
77.5.本实用新型的直流电机驱动装置包括自动识别装置,其能够自动识别当前通电的交流输入线路,并根据自动识别模块的识别结果而驱动所述直流电机正向旋转或反向旋转。因此,本实用新型能在保持跑步机的主控制器的电路和软硬件设计不变更的情况下,利用现有跑步机的(三根)交流供电输入,自动控制电机正转或反转,从而按需要使升降执行器上升或下降,而无需额外的控制输入信号。与此同时,由于采用了直流电机,大大提高了运行效率,降低了电动机的发热,解决了现有技术升降执行器在需要连续调整跑步机坡度时的效率低下和发热严重无法连续使用的问题。实现与交流电机近似成本的情况下,缩小执行器尺寸,提高方案集成度。
78.6.本实用新型的方案采用霍尔元件检测直流电机的速度信号,控制器通过该速度信号能实时监控升降过程中转速的变化,实现转速闭环控制,确保在不同负载下的升降速度稳定,实现负载速度动态调整的效果。直流电机转速根据霍尔信号会进行转速闭环控制,实现升降执行器正反转在不同负载下的等速工作,达到交流电机的使用体验。
79.7.直流电机驱动装置在停机后将h桥驱动模块的两个下桥臂导通,显著改善了升降执行器的自锁性能。
80.8.采用高压直流电机,交流电经整流后的电流直接用于驱动直流电机,而无需额外降压电路或电源。
81.以上所述,仅为为了说明本实用新型的原理而采用的示例性实施例,并非用于限定本实用新型的保护范围。对于本领域内的普通技术人员而言,在不脱离本实用新型的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。