1.本实用新型属于农业机械领域,涉及一种适配于无人驾驶拖拉机的快速挂接装置。
背景技术:
2.随着无人驾驶技术的发展,在农业领域得到广泛的使用,无人驾驶拖拉机代替传统拖拉机作业变成可能。目前拖拉机挂接农业机械,大多是采用人力完成机械的挂接,因操作不便,定位不准,挂接时费时费力,因此现有的挂接方式无法满足无人驾驶拖拉机全程无人化的作业要求。
技术实现要素:
3.1.实用新型要解决的技术问题
4.本实用新型的目的在于实现无人驾驶拖拉机全程无人化与农机具的快速对接,克服人为操作挂接时的种种困难,本实用新型结构简单,对接定位准确,能够适应各种悬挂式农业机械,实现快速挂接,无需人为的辅助做到全挂接过程的自动化。
5.2.技术方案
6.为了达到上述目的,本实用新型提供的技术方案为:
7.本实用新型特征是,包括挂接装置主机与挂接装置副机,所述挂接装置主机通过采用a字形结构并设有上下挂接点与无人驾驶拖拉机悬挂系统挂接,所述挂接装置副机采用类三角形结构,结构两边采用u字形结构,使得主副机挂接紧固,挂接副机开有锁扣导槽与锁止孔位,并设有上下挂接点与农机具挂接。
8.前述的实用新型特征,所述的锁止装置包括主挂机支架横梁上固连着锁止机构支撑架,支撑架内侧固连着u形槽位,并开有连接孔位,锁止钩开有连接孔位和对接孔位,外侧同样固连着u形槽位,锁止钩与支撑架采用螺栓螺母连接,连接间套入扭矩弹簧,弹簧两端抵住两u形槽位,用于驱动锁止钩顺着锁止导槽完成对副挂机的自锁,左右锁止钩通过对接孔位采用锁止钩连接栓连接,主挂机支架横梁后固连着锁止气缸连接支座,气缸一端采用螺栓螺母与连接支座连接,伸缩杆一端与锁止钩对接螺栓杆连接,用于驱动锁止钩实现对副机锁止孔位的松开。
9.前述的实用新型特征,所述的定位对接装置包括漫反射红外光电传感器和超声波距离传感器,支撑架内开孔放置超声波距离传感器,漫反射红外光电传感器固定在其配套支架上,支架与主挂机顶端下方固连,定位对接装置实现无人驾驶拖拉就挂接装置与被挂接悬挂架精确定位对接,对接同时自锁机构实现两者的自锁止。
10.3.本实用新型所达到的有益效果
11.本实用新型主副挂机结构简单,挂载时方便快捷,精准定位系统引导无人驾驶拖拉机与农机具准确对接,锁紧装置保证了无人操作的对接过程挂载稳定可靠,由此挂载和卸载作业能够实现无人作业。
附图说明
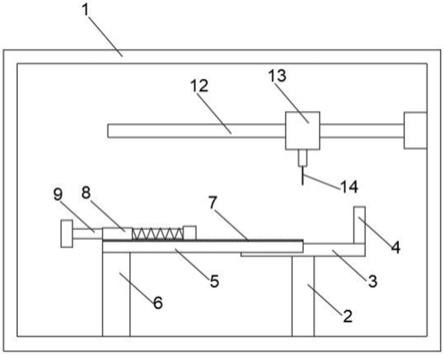
12.图1是本实用新型总体结构示意图。
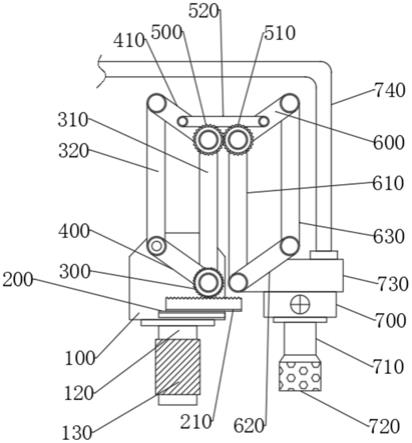
13.图2是快速挂接装置主挂机示意图。
14.图3是快速挂接装置主挂机功能区示意图。
15.图4是锁止机构示意图。
16.图5快速挂接装置副挂机示意图。
17.图中1.主挂机、2.主挂机上挂钩、3. 副挂机、4.支架横梁、5.主挂机下挂钩、6.副挂机上挂钩、7.锁止钩、8.支撑架、9.锁止气缸、10.支撑座、11. 副挂机下挂钩、12.漫反射红外光电传感器、13.锁止钩连接栓、14.超声波测距传感器、15.锁止钩u形槽、16.扭矩弹簧、17.支架u形槽、18.锁止钩导槽、19.副挂机黑色油漆区、20.锁止孔、21.副挂机白色油漆带。
具体实施方式
18.下面结合附图对本实用新型作进一步描述。
19.如图1所示,本实用新型由快速挂接装置主挂机(图2)和快速挂接装置副挂机(图5)挂接而成。
20.如图2所示,主挂机1主体均由焊接而成,支撑架8焊接在支架横梁4上表面。
21.如图3和4所示,锁止钩7和支撑架8通过螺栓螺母连接,其间套入扭矩弹簧16,扭矩弹簧16两力臂分别抵住位于锁止钩7外侧的锁止钩u形槽15和位于支撑架8内测的支架u形槽17底端,锁止钩7上开有连接孔通过锁止钩连接栓13相连接,锁止气缸9伸长端与锁止钩连接栓13相连,锁止气缸9另一端与支撑座10采用螺栓螺母连接,而支撑架8正面开有相应大小的孔位用于放置和固定超声波测距传感器14,漫反射红外光电传感器12固定在其配套支架上,支架与a字形顶端下方固连。
22.如图5所示,副挂机3主体均由焊接而成,而锁止钩导槽18和锁止孔20对称开设于副挂机3主体正面上,副挂机白色油漆带21漆于副挂机3主体表面正中,副挂机黑色油漆区19对称漆于副挂机3位于副挂机白色油漆带21两侧,用于漫反射红外光电传感器12检测。
23.本实用新型的工作过程如下:
24.工作前,将主挂机上挂钩2和主挂机下挂钩5通过悬挂销、安全销安装在无人驾驶拖拉机悬挂系统上,再将副挂机上挂钩6和副挂机下挂钩11通过连接销、安全销安装在农机具上。漫反射红外光电传感器12与超声波测距传感器14与无人驾驶拖拉机控制系统和供电系统相连,将锁止气缸9与无人驾驶拖拉机控制系统和供能系统相连,确保传感器对无人驾驶拖拉机的控制定位和自解锁动作的实现。
25.快速挂接时,基于超声波测距传感器14测得的信号控制无人驾驶拖拉机倒入对接,同时漫反射红外光电传感器12对副挂机3上副挂机黑色油漆区19和副挂机白色油漆带22进行检测,当有漫反射红外光电传感器12检测到副挂机黑色油漆区19时控制无人驾驶拖拉机向相应方向进行修正,直到漫反射红外光电传感器12均检测到副挂机白色油漆带22时表明主挂机1和副挂机3对正,之后当超声波测距传感器14测得主挂机1和副挂机3距离为零时,控制无人驾驶拖拉机悬挂系统举升,与此同时锁止钩7顺着锁止钩导槽19引入锁止孔20内,并在扭矩弹簧16驱动下与副挂机3实现锁死。
26.卸载时,无人驾驶拖拉机控制锁止气缸9收缩,实现锁止钩7与锁止孔21的脱离,之后无人驾驶拖拉机悬挂系统将农机具下放,直到最终主挂机1和副挂机3相互脱离。
27.本实施例只是对本发明构思和实现的一个说明,并非对其进行限制,在本发明构思下,未经实质变换的技术方案仍然在保护范围内。
技术特征:
1.一种适配无人驾驶拖拉机的快速挂接装置,其特征是,包括挂接装置主机与挂接装置副机,以及定位系统与锁止装置,所述挂接装置主机通过采用a字形结构并设有上下挂接点与无人驾驶拖拉机悬挂系统挂接,所述挂接装置副机采用类三角形结构,结构两边采用u字形结构,使得主副机挂接紧固,挂接副机开有锁扣导槽与锁止孔位,并设有上下挂接点与农机具挂接。2.根据权利要求1所述的一种适配无人驾驶拖拉机的快速挂接装置,其特征是,所述的锁止装置包括锁止钩与扭矩弹簧,所述锁止钩与扭矩弹簧安装于支撑架上,所述扭矩弹簧抵住锁止钩外侧u形槽与支架内测u形槽底部,用于驱动锁止钩转动顺着锁止钩导槽实现对副挂机的锁止孔的锁死,所述锁止钩与锁止钩连接栓相连,锁止气缸与支撑座采用螺栓螺母连接,锁止气缸又与锁止钩连接栓连接,用于驱动锁止钩反向转动,实现对副挂机的锁止孔的脱离。3.根据权利要求1所述的一种适配无人驾驶拖拉机的快速挂接装置,其特征是,定位系统包括漫反射红外光电传感器和超声波测距传感器,超声波测距传感器安装于支撑架所开设孔位上,而漫反射红外光电传感器固定于主挂机顶端下方,副挂机白色油漆带漆于副挂机主体表面正中,副挂机黑色油漆区对称漆于副挂机位于副挂机白色油漆带两侧,用于漫反射红外光电传感器的检测。
技术总结
本实用新型是一种适配无人驾驶拖拉机的快速挂接装置,其特征包括与无人拖拉机悬挂系统连接的主挂机和与农机具连接的副挂机。本实用新型在工作时,超声波测距传感器和漫反射红外光电传感器给予无人驾驶拖拉机对农机具上副挂机的准确定位,使主副挂机完成对准定位,当主副挂机贴合并在悬挂系统的动作下进行嵌套吻合时,锁止机构与副挂机完成锁止,防止主副挂机脱离。当农机具需卸载时,无人驾驶拖拉机控制气缸收缩,锁止机构与副挂机脱离,无人驾驶拖拉机悬挂下放农机具,主副挂机最终实现脱离,由此实现无人操作下的快速挂接和卸载工作。作。作。
技术研发人员:詹文轩 王家忠 弋景刚
受保护的技术使用者:河北农业大学
技术研发日:2021.03.24
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。