1.本发明涉及使用人造羽毛的羽毛球。
背景技术:
2.用于羽毛球运动的羽毛球包括使用水禽羽毛(天然羽毛)作为羽毛的羽毛球(即天然羽毛球)和使用通过尼龙树脂等人工制造的人造羽毛的羽毛球(即人造羽毛球)。
3.如公知的,天然羽毛球使用来自鹅、鸭等的大约16根天然羽毛,并且具有这样的结构,其中羽毛的羽毛轴的底端被植入在由软木制成并覆盖有皮革的半球形基座(基部)中。在天然羽毛球中使用的羽毛的特征在于具有低比重和极轻的重量。羽毛高度坚硬,天然羽毛球提供了独特的飞行性能和舒适的击球感觉。
4.另一方面,人造羽毛球的一个众所周知的例子是设有由树脂制成的羽毛并且整体模制成环形的,但是由于这种人造羽毛球的羽毛不像天然羽毛球的羽毛那样独立地运动,所以难以获得与天然羽毛球类似的飞行性能。
5.有鉴于此,如以下专利文献1中所述,已经提出了模仿天然羽毛的人造羽毛。具体地,已经提出了一种具有包括羽毛部和支撑羽毛部的羽毛轴部的人造羽毛的羽毛球。
6.在先技术文献
7.专利文献
8.专利文献1:日本专利特开2008
‑
206970号公报。
技术实现要素:
9.发明要解决的课题
10.与天然羽毛球相比,如上所述的具有人造羽毛的羽毛球(人造羽毛球)的飞行稳定性仍是较差的。主要原因是人造羽毛比天然羽毛更致密和更重,并且不可能表现出与天然羽毛相同的空气动力学特性。
11.如果为了减小人造羽毛的重量而减小轴(羽毛轴部)的重量,则刚性可能不足以经受诸如扣杀的强力击球。另一方面,如果羽毛部的面积减小,则空气动力学特性进一步恶化。
12.即使人造羽毛球的总重量与天然羽毛球的重量相同,由于重心的位置也与天然羽毛球的重心的位置不同,因此,当姿势失去平衡时稳定性就会变差(回到正确的姿势需要时间)。特别地,在被称为羽毛球击球法的“发夹网击球(hairpin net shot)”中,与天然羽毛球的姿势稳定性的差异是显著的。发夹网击球是一种击球羽毛球以使羽毛球在空中漂浮并划出独特的飞行轨迹的技术。在发夹网击球期间,将大幅度使羽毛球的姿势失去平衡。
13.本发明是鉴于上述情况而提出的,并且本发明的一方面是提供一种对于涉及姿势大幅度失去平衡的击球,能够具有改善的空气动力学特性的羽毛球。
14.用于解决课题的方案
15.用于实现上述目的的本发明的主要方面是一种羽毛球,该羽毛球包括基部和以环
形布置在基部上的多个人造羽毛,其中人造羽毛各自包括羽毛部和支撑羽毛部的羽毛轴部,其中羽毛部包括重叠部,重叠部在羽毛轴部的沿与轴向正交的宽度方向上的一侧的位置上与相邻羽毛部的内侧重叠,并且其中,在羽毛轴部的沿宽度方向的另一侧上的位置处,羽毛部包括相对于重叠部的表面向外倾斜的倾斜部。
16.根据本说明书和附图的描述,本发明的其它特征将变得明显。
17.发明效果
18.根据本发明,可以提供一种羽毛球,该羽毛球对于涉及姿势大幅度失去平衡的击球,能够具有改善的空气动力学特性。
附图说明
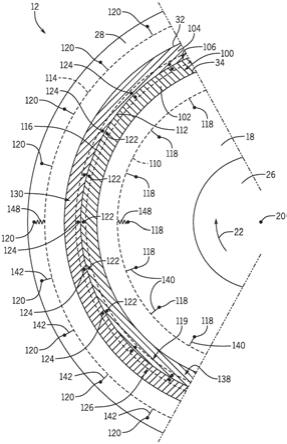
19.图1是从基部2的一侧观察的人造羽毛球100(比较例)的透视图。
20.图2是从人造羽毛110的一侧观察的人造羽毛100(比较例)的透视图。
21.图3a是比较例的人造羽毛110的透视图。图3b是从上方观察的人造羽毛110的示意图。
22.图4是从上方观察的布置在比较例的人造羽毛球100上的多个人造羽毛110的示意图。
23.图5是从上方观察的第一实施例的人造羽毛10的示意图。
24.图6是从上方观察的第一实施例的布置在人造羽毛球1上的多个人造羽毛10的示意图。
25.图7是示出人造羽毛球1的阻力的评估结果的图。
26.图8是示出人造羽毛球1的俯仰力矩的评估结果的图。
27.图9是示出效果确认测试的评估结果的图。
28.图10a是从上方观察的第一变型的人造羽毛10a的示意图。图10b是从上方观察的布置在人造羽毛球1上的多个人造羽毛10a的示意图。
29.图11是从上方观察的第二变型的人造羽毛10b的示意图。
30.图12是从上方观察的第三变型的人造羽毛10c的示意图。
31.图13是从上方观察的第四变型的人造羽毛10d的示意图。
32.图14是从上方观察的第二实施例的人造羽毛10'的示意图。
具体实施方式
33.概要
34.根据本说明书和附图的描述,至少以下内容将变得明显。
35.阐明了一种羽毛球,包括:基部;以及以环形布置在基部上的多个人造羽毛,人造羽毛各自包括羽毛部和支撑羽毛部的羽毛轴部,当从与基部相反的一侧观察,以羽毛球的中心轴线为中心的逆时针方向作为旋转方向时,在羽毛轴部沿旋转方向的下游侧上,第一假想直线相对于第二假想直线向外,第一假想直线是连接羽毛部的沿旋转方向的下游端和羽毛轴部的中心部分的线,第二假想直线是连接羽毛部的沿旋转方向的上游端和羽毛轴部的中心部分的直线。
36.根据该羽毛球,在高攻角(姿势失去平衡时)的投影面积大,并且可以增加阻力和
俯仰力矩。结果,能够改善姿势失去平衡的击球(发夹网击球)的空气动力学特性。
37.在这样的羽毛球中,期望的是,羽毛部包括在羽毛部的沿旋转方向的下游端与羽毛轴部之间的位置处的倾斜部,倾斜部是相对于第二假想直线向外倾斜的部分,以及当从羽毛轴部的轴向方向的延伸上观察羽毛部时,倾斜部的长度大于从羽毛部的沿旋转方向的下游端到羽毛轴部的长度的一半。
38.根据该羽毛球,投影面积更大,因此能够进一步改善空气动力学特性。
39.在这种羽毛球中,可以接受的是,羽毛部包括在羽毛轴部的沿旋转方向的上游侧上的位置处与相邻的羽毛部的内侧重叠的重叠部,以及羽毛部的重叠部与相邻的羽毛部接触。
40.根据该羽毛球,能够容易地抑制在正常飞行(以低攻角)期间围绕中心轴线的旋转运动。
41.在这种羽毛球中,可以接受的是,羽毛部包括在羽毛轴部的沿旋转方向的上游侧上的位置处与相邻的羽毛部的内侧重叠的重叠部,以及羽毛部的重叠部不与相邻的羽毛部接触。
42.根据该羽毛球,可以增大倾斜部的倾斜角度,从而可以进一步增大投影面积。
43.阐明了一种羽毛球,包括:基部;以及以环形布置在基部上的多个人造羽毛,人造羽毛各自包括羽毛部和支撑羽毛部的羽毛轴部,当从与基部相反的一侧观察,以羽毛球的中心轴线为中心的逆时针方向作为旋转方向时,羽毛部包括在羽毛部的沿旋转方向的下游端和与羽毛轴部重叠的位置之间的突出部,突出部是从外表面向外突出的部分。
44.根据该羽毛球,对于姿势大幅度失去平衡的击球(发夹网击球),能够改善空气动力学特性。
45.第一实施例
46.在给出本实施例的人造羽毛球1的描述之前,下面首先描述比较例。
47.人造羽毛球(比较例)的基本结构
48.图1和图2是用于描述根据比较例的设有人造羽毛110的人造羽毛球100的基本结构的外部视图。图1是从基部2的一侧观察人造羽毛球100(比较例)的透视图。图2是从人造羽毛110的一侧观察人造羽毛球100(比较例)的透视图。
49.人造羽毛球100包括基部2,模拟天然羽毛的多个人造羽毛110,以及用于将人造羽毛110彼此固定的绳状构件3。基部2例如,通过用薄皮革覆盖软木基座而构成。基部2成形为直径为25mm至28mm的半球形,并且具有平坦表面。人造羽毛110的根部(底端)沿着平坦表面的圆周以环形嵌入平坦表面中。人造羽毛110布置成使得它们之间的距离随着距基部2的距离增加而变宽。而且,如图所示,每个人造羽毛110布置成与相邻的人造羽毛110重叠。结果,由人造羽毛110形成裙部4。人造羽毛110通过绳状构件3(例如,棉绳)彼此固定。
50.在正常飞行期间(以稍后描述的低攻角),人造羽毛球100围绕羽毛球的中心轴线沿预定方向(旋转方向)旋转。在本实施方式中,旋转方向是从图2中的人造羽毛110侧(与基部2相反的一侧)观察时的逆时针方向,换句话说,是从基部2观察时的顺时针方向。注意,羽毛球的中心轴线是经过由人造羽毛(这里是人造羽毛110)形成的环的中心(换句话说是裙部的中心)以及基部的中心的轴线。
51.人造羽毛(比较例)的结构
52.图3a是比较例的人造羽毛110的透视图,图3b是从上方观察的人造羽毛110的示意图。在这些图中,已经描述的部件用相同的附图标记表示。
53.人造羽毛110包括羽毛部120和羽毛轴部14。羽毛部120是与天然羽毛的羽片对应的部分,羽毛轴部14是与天然羽毛的羽轴对应的部分。
54.在这些图中,竖直方向(对应于轴向方向)沿着羽毛轴部14的长度方向限定,具有羽毛部120的一侧是上侧(顶端),而相反的一侧是下侧(底端)。而且,在这些图中,基于人造羽毛110附接到基部2的状态来限定前和后。注意,前后方向对应于羽毛部120的法线方向,并且在人造羽毛110以环形布置在基部2上的状态下,前后分别对应于外侧和内侧。而且,在这些图中,沿着羽毛部120从羽毛轴部14延伸的方向限定左右方向(正交于竖直方向的方向)。在左右方向上,当从后侧(内侧)看前侧(外侧)时,“右”是指右侧,“左”是指左侧。注意,左右方向也将称为宽度方向。而且,相对于羽毛轴部14,右侧对应于旋转方向的上游侧,左侧对应于旋转方向的下游侧。在下面,可以根据附图中限定的术语“上”、“下”、“左”、“右”、“前”和“后”来描述构成元件。
55.羽毛部120是模仿天然羽毛的羽片形状的构件。例如,羽毛部120可以由无纺布或树脂构成。在使用无纺布的情况下,在表面上形成加强膜以防止无纺布的纤维在击球期间变得松动。可以通过涂覆树脂来形成加强膜,并且可以采用各种涂覆方法,诸如浸渍法、喷涂法和辊涂法。注意,也可以在羽毛部120的一侧或两侧形成加强膜。而且,加强膜可以形成在羽毛部120的整个表面上或表面的一部分上。此外,羽毛部120的形状不限于附图中所示的形状(这同样适用于后面描述的羽毛部12)。例如,可以采用椭圆形。
56.羽毛轴部14是模仿天然羽毛的羽轴的形状的细长构件,并且是支撑羽毛部120的构件。羽毛轴部14具有:用于支撑从羽毛部120的上边缘到其下边缘的区域的羽毛支撑部14a;以及从羽毛部120突出的羽根部14b。羽根部14b是对应于天然羽毛的羽根(注意,这有时被称为羽茎)的部分。羽毛轴部14的底端(羽根部14b的下端)嵌入在基部2中并固定到基部2。另一方面,羽毛轴部14的顶端与羽毛部12的上端重合。注意,在该示例中,羽毛轴部14的截面形状是四边形(矩形),但是截面形状不限于此,可以使用其它形状(圆形、椭圆形、多边形等)。
57.而且,羽毛轴部14和羽毛部120可以是分离的主体或者可以是一体化的。例如,如果使用树脂作为用于羽毛轴部14和羽毛部120的材料,则羽毛轴部14和羽毛部120可以通过使用模具的注射成型来一体成型。而且,通过使用两种材料(树脂)进行注射成型(双组分成型),可以使用不同的材料一体地形成羽毛轴部14和羽毛部120。
58.羽毛部120可以被支撑在羽毛支撑部14a的前侧上,或者羽毛部120可以被支撑在羽毛支撑部14a的后侧上。而且,以下构造是可能的,羽毛部120由两片构成,并且两个羽毛部120夹着羽毛支撑部14a。此外,羽毛部120可以嵌入在羽毛支撑部14a内。
59.图4是从上方观察比较例的布置在人造羽毛球100上的人造羽毛110的示意图。如图所示,羽毛部120布置成使得羽毛部120以稍微不同的角度彼此重叠。更具体地,每个羽毛部120的右端部与相邻的羽毛部120的左端部的内侧重叠。右端部的该部分(与相邻的羽毛部120重叠的部分)将被称为重叠部s。而且,在该示例中,每个羽毛部120(具体地,重叠部s的端部)与相邻的羽毛部120接触。
60.在上述人造羽毛球100(比较例)中,人造羽毛110的重量比天然羽毛的重量重。如
果使羽毛轴部14变薄和变轻,则可能存在刚性不足以经受诸如扣杀的强烈击球的可能性,并且如果羽毛部120的面积减小,则可能存在空气动力学特性恶化的可能性。即使调节人造羽毛球100的总重量以匹配天然羽毛球的总重量,也难以匹配重心,并且与天然羽毛球相比,重心的位置在后部(远离基部2)。因此,当姿势失去平衡时,稳定性恶化。
61.特别地,在击打羽毛球以使羽毛球在空中漂浮的发夹网击球中,由于姿势失去平衡,因此姿势稳定性与天然羽毛球的姿势稳定性的差异是显著的。
62.有鉴于此,在本实施例中,对于姿势大幅度失去平衡的击球(发夹网击球),将改善空气动力学特性。注意,在下面的描述中,接近正常飞行(基部2面向行进方向的飞行)的姿势被称为“低攻角”,并且姿势相对于行进方向大幅度失去平衡的状态被称为“高攻角”。
63.本实施例的人造羽毛球1
64.图5是从上方观察的第一实施例的人造羽毛10的示意图。而且,图6是从上方观察的布置在第一实施例的人造羽毛球1上的多个人造羽毛10的示意图。注意,具有与比较例相同构造的部分用相同的附图标记表示,并将省略其说明。而且,方向的定义与比较例中相同。连接羽毛部12的左端(沿旋转方向的下游端)和羽毛轴部14的中心部分的直线(点划线)是假想直线m(对应于第一假想直线)。并且,连接羽毛部12的右端(沿旋转方向的上游端)和羽毛轴部14的中心部分的直线(虚线)是假想直线n(对应于第二假想直线)。注意,如在本实施例中,在羽毛轴部14的截面形状为矩形的情况下,羽毛轴部14的中心部分是位于羽毛轴部14的轴向中心的部分,诸如对角线的交点。作为另一示例,如果羽毛轴部14的截面形状是椭圆形,则中心部分是长轴和短轴的交点。
65.如图6所示,本实施例的人造羽毛球1包括多个人造羽毛10。与比较例的人造羽毛110类似,人造羽毛10沿着基部2(在此未图示)的平坦表面的圆周以环形布置。
66.人造羽毛10的结构
67.如图5和图6所示,本实施例的人造羽毛球1的人造羽毛10各自具有羽毛部12和羽毛轴部14。在本实施例中,羽毛部12的形状与上述比较例的羽毛部120(见图3b)的形状不同。
68.与比较例(图3a)类似地,羽毛部12由羽毛轴部14支撑。
69.与比较例类似地,羽毛部12的羽毛轴部14右侧上的端部与相邻的羽毛部12的左端部内侧重叠(重叠部s)。
70.而且,羽毛部12在羽毛轴部14的左侧具有倾斜部12a。倾斜部12a相对于假想直线n(第二假想直线)以角度θ(对应于倾斜角度)向外(朝向前侧)倾斜。因此,重叠部s的宽度方向的长度比比较例(图4)的宽度方向的长度短。而且,如图6所示,羽毛部12的右端(重叠部s)与相邻的羽毛部12的左端(倾斜部12a)不接触。
71.而且,由于在本实施例中设有倾斜部12a,所以在羽毛轴部14的左侧(沿旋转方向的下游侧),假想直线m(第一假想直线)相对于假想直线n向外(位于前侧)。
72.通过这样的形状,本实施例的人造羽毛球1与比较例的人造羽毛球100相比在高攻角具有更大的投影面积。注意,投影面积是当三维物体以二维投影时产生的“阴影”的面积(这里是从侧面观察羽毛球时的面积)。结果,如后面将描述的,人造羽毛球1在高攻角具有较高的空气阻力(阻力),因此,与比较例(人造羽毛球100)相比,当姿势失去平衡时,可以抑制不稳定的行为(晃动等),使得姿势更容易稳定。
73.人造羽毛球1的特性评估
74.在本实施例的人造羽毛球1的基本空气动力学特性中,评估了阻力和俯仰力矩。
75.在作用在处于气流中的羽毛球上的力的分量中,阻力是平行于气流方向的分量(分力)。注意,垂直于气流方向的分量(分力)称为升力。
76.俯仰力矩是当气流的方向和基部的定向之间存在差异时(即,当羽毛球相对于气流倾斜时)试图返回到原始姿势(到低攻角)的力。俯仰力矩越大,在恢复姿势的方向上的移动越快。
77.在本实施例中,通过使用具有不同的羽毛部12的倾斜部12a的弯曲角度θ(对应于倾斜角度)的多个(这里为5个)样本(人造羽毛1)来测量阻力和俯仰力矩。注意,弯曲角度为0度的样本对应于比较例的人造羽毛球100。
78.图7是示出人造羽毛球1的阻力的评估结果的图。在该图中,横轴表示弯曲角度(倾斜角度),纵轴表示在当弯曲角度为0度时的阻力被认为是100的情况下的相对阻力的比率。在进行评估时,进行通常的风洞测试。具体地,将人造羽毛球1放置在风洞装置的气流中,并且通过测力传感器测量作用在人造羽毛球1上的阻力。而且,在图7中,以10度的测量间隔对0度至140度的攻角的测量值进行比较。
79.如图所示,具有大弯曲角度θ的样本也具有高阻力。这是因为当弯曲角度θ大时,高攻角处的投影面积大,这增加了空气阻力(阻力)。
80.图8是示出人造羽毛球1的俯仰力矩的评估结果的图。在该图中,横轴表示弯曲角度(倾斜角度),纵轴表示在当弯曲角度为0度时的俯仰力矩被认为是100情况下的相对俯仰力矩的比率。用于评估俯仰力矩的方法与上述阻力的情况相同。
81.在图8中,虽然弯曲角度θ小的两个样本之间几乎没有差异,但是可以说当弯曲角度θ大时,由于阻力增加,俯仰力矩也上升。这些结果用于计算出呈现出俯仰力矩的上升效果的弯曲角度(拐点)。在本实施例中,进行计算以求出经过俯仰力矩几乎没有差异(弯曲角度θ小)的两点的直线与经过实现效果(弯曲角度大)的两点的直线的交点。结果,呈现出效果的弯曲角度为9.6度。注意,计算拐点的方法不限于此。例如,对于小弯曲角度θ和大弯曲角度θ,增加采样数(设定弯曲角度θ的数量),通过使用最小二乘法等获得交点(拐点)也是可以接受的。
82.效果确认
83.使用具有不同弯曲角度θ的上述五个样本确认效果。通过比较三个有经验的羽毛球运动员的发夹网击球的方法来证实该效果。具体地,通过配对比较方法评估所有五个样本并进行评分。注意,配对比较方法是这样的方法,其中提取两个样本(一对),对好样本给出1分,在等效的情况下给出0分,对坏样本给出
‑
1分。通过循环来评估所有对,并进行统计处理。
84.图9是示出效果确认测试的评估结果的图。在该图中,横轴表示弯曲角度θ,纵轴表示评估得分。
85.如该图所示,得到接近俯仰力矩的结果。换句话说,在具有小弯曲角度θ的两个样本之间几乎没有差异,但是评估分数随着弯曲角度θ的增加而增加。
86.这里,与上述俯仰力矩的情况类似,计算呈现出效果的弯曲角度(拐点)。具体地,进行计算以找出经过具有小弯曲角度的两点的直线与经过具有大弯曲角度的两点的直线
的交点。结果,呈现出效果的弯曲角度(拐点)为12.2度。
87.基于上述结果,可以确认,由于将倾斜部12a的弯曲角度θ增大到一定程度,本实施例的人造羽毛球1能够具有比比较例的人造羽毛球100(弯曲角度为0度)更高的阻力和俯仰力矩。因此,与比较例(弯曲角度为0度的样本)相比,本实施例的人造羽毛球1能够在姿势失去平衡时抑制不稳定行为,从而能够进一步稳定姿势。
88.注意,虽然在本实施例中羽毛部12设有重叠部s,但是可以省略重叠部s。换句话说,相邻的羽毛部12不需要沿宽度方向彼此重叠(同样适用于以下实施例)。
89.第一变型
90.图10a是从上方观察的第一变型的人造羽毛10a的示意图。而且,图10b是从上方观察的布置在人造羽毛球1上的多个人造羽毛10a的示意图。
91.在第一变型的人造羽毛10a中,在羽毛轴部14的左侧(沿旋转方向的下游侧)的位置处,羽毛部12相对于假想直线n向外倾斜(弯曲)角度θ。换句话说,在到羽毛轴部14的左方的一侧,羽毛部12具有倾斜部(倾斜部12a)和非倾斜部(倾斜部12a和羽毛轴部14之间的部分)。
92.注意,在第一变型的情况下,在羽毛轴部14的左侧(沿旋转方向的下游侧)上,假想直线m相对于假想直线n向外。
93.因此,即使在第1变型的人造羽毛球1中,投影面积也比比较例(人造羽毛球100)的投影面积大。因此,与比较例的情况相比,姿势能够更容易稳定。注意,如该图所示,期望的是,当从上方(在轴向方向的延伸上)观察羽毛部12时,倾斜部12a的长度l1比非倾斜部的长度l2长(换句话说,倾斜部12a的长度l1比从羽毛部12的左端(沿旋转方向的下游端)到羽毛轴部14的长度的一半长)。根据这种构造,与相反的情况相比(当l2长于l1时),投影面积更大,并且姿势可以更稳定(可以改善空气动力学特性)。
94.注意,羽毛部12的右端部(重叠部s)可以与相邻的羽毛部12接触。例如,可以改变羽毛部12的尺寸以与相邻的羽毛部12接触。如果相邻的羽毛部12以这种方式彼此接触,则在正常飞行(以低攻角)期间更容易抑制围绕中心轴线的旋转。另一方面,在不与相邻的羽毛部12接触的情况下,能够使弯曲角度θ变大,因此能够使投影面积变大。
95.而且,在上述实施例中,倾斜部12a的弯曲角度θ(倾斜角度)与竖直方向(轴向方向)的位置无关,是恒定的。但是本发明不限于此,弯曲角度θ(倾斜角度)可以根据竖直方向(轴向方向)上的位置而不同。特别地,倾斜部12a的弯曲角度θ沿竖直方向朝向上侧(顶端侧)增加对于改善空气动力特性是有效的。而且,在这种情况下,由于弯曲角度θ在靠近基部2的一侧较小,所以进入裙部4的气流不太可能往外逸出。
96.第二变型
97.图11是从上方观察的第二变型的人造羽毛10b的示意图。
98.如图所示,在第二变型的人造羽毛10b中,羽毛部12的位于羽毛轴部14的右侧(沿旋转方向的上游侧)的部分不是平坦的,而是沿前后方向弯曲的。在第二变型的情况下,倾斜部12a相对于假想直线n向外倾斜,并且假想直线m在羽毛轴部14的左侧(沿旋转方向的下游侧)上位于假想直线n的外侧。
99.结果,与上述实施例类似,投影面积大,并且可以使姿势稳定(可以改善空气动力学特性)。
100.第三变型
101.图12是从上方观察的第三变型的人造羽毛10c的示意图。
102.如图所示,在第三变型的人造羽毛10c中,羽毛部12的右端部向内(朝向背侧)弯曲。在第三变型的情况下,倾斜部12a相对于假想直线n向外倾斜,并且假想直线m在羽毛轴部14的左侧(沿旋转方向的下游侧)上位于假想直线n的外侧。
103.结果,与上述实施例类似,投影面积大,并且可以使姿势稳定(可以改善空气动力学特性)。
104.第四变型
105.图13是从上方观察的第四变型的人造羽毛10d的示意图。
106.如图所示,在第四变型的人造羽毛10d中,羽毛部12在羽毛轴部14的右侧(沿旋转方向的上游侧)向外弯曲。在第四变型的情况下,倾斜部12a相对于假想直线n向外倾斜,并且假想直线m在羽毛轴部14的左侧(沿旋转方向的下游侧)上位于假想直线n的外侧。
107.结果,与上述实施例类似,投影面积大,并且可以使姿势稳定(可以改善空气动力学特性)。
108.第二实施例
109.图14是从上方观察的第二实施例的人造羽毛球1的人造羽毛10'的示意图。在基部2(在此未图示)上的布置与上述第一实施例的布置相同,因此将不进行描述。
110.第二实施例的人造羽毛10'包括羽毛部12'和羽毛轴部14。
111.羽毛部12'具有基础部12b和突出部12c。基础部12b是与比较例的羽毛部120(图3和图4)相同的部件,并且由羽毛轴部14支撑。而且,基础部12b的右端部(重叠部s)与相邻的羽毛部12'(基础部12b)的内侧重叠。
112.突出部12c设置成从基础部12b的外表面向外突出。而且,突出部12c设置在沿宽度方向(旋转方向)与羽毛轴部14重叠的位置处。
113.如上所述,第二实施例的羽毛部12'在基础部12b的外侧设有突出部12c。结果,在第二实施例中,高攻角下的投影面积也是大的,因此,可以抑制姿势大幅失去平衡时的不稳定行为,并且可以使姿势更稳定。
114.注意,突出部12c不限于形成在上述位置。突出部12c形成在羽毛部12'的左端(沿旋转方向的下游端)和羽毛轴部14之间的位置是足够的。换句话说,突出部12c可以设置在羽毛轴部14的左侧(沿旋转方向的下游侧)。注意,如果如本实施例那样,突出部12c设置在沿宽度方向(旋转方向)与羽毛轴部14重叠的位置处,则平衡得到改善,并且羽毛轴部14能够容易地支撑羽毛部12'。
115.其他
116.上述实施例有助于理解本公开,并且不以任何方式被解释为限制本公开。本公开可以在不偏离其要旨的情况下以各种方式改变或更改,并且包括其等同物。
117.附图标记说明
118.1 人造羽毛球
119.2 基部
120.3 绳状构件
121.4 裙部
122.10、10a、10b、10c、10d、10' 人造羽毛
123.12,12' 羽毛部
124.12a 倾斜部
125.12b 基础部
126.12c 突出部
127.14 羽毛轴部
128.14a 羽毛支撑部
129.14b 羽根部
130.100 人造羽毛球(比较例)
131.110 人造羽毛(比较例)
132.120 羽毛部(比较例)
133.s 重叠部
134.m 假想直线(第一假想直线)
135.n 假想直线(第二假想直线)
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。