1.本发明涉及一种医疗器械康复设备,尤其是涉及一种多态人体平衡训练系统。
背景技术:
2.平衡能力是人体的基本运动技能,是各项活动的基础,保持平衡是身体控制能力的重要体现,分静态平衡能力和动态平衡能力。随着我国人口老龄化,脑卒中患者逐年上升,脑卒中导致的偏瘫发生率高达70%以上,患者常见跌倒、跛行等平衡功能障碍相关的并发症。平衡训练能够增强患者核心肌力、改善人体平衡能力及下肢运动功能,从而促进患者平衡功能恢复,生活质量提升。
3.针对动态平衡训练所研发的仪器常见的有美国biodex动静态平衡训练仪、美国neurocom的smart equitest system、意大利tecnobody的pro
‑
kin平衡测试训练系统、德国posturomed静态平衡仪、德国dr
‑
wolf的balance
‑
check动态平衡能力测试仪、法国synapsys posturography system静动态平衡仪、法国allcare innovations的imoove ftm动态平衡测试仪等。国内也开展了相关研究,对动态平衡设备进行了研发设计。
4.虽然现有动态平衡装置能够对人体进行动态平衡训练,有助于提高患者的平衡能力,但仍存在结构复杂、价格昂贵,或运动模式单一,所训练角度范围无法根据患者不同情况、不同康复阶段进行随时调整,或调整繁琐,或为无动力源驱动的仅供人体进行主动动态平衡训练,或为机动化的,人体运动均通过机动驱动仅能做被动训练。个别设备因存在机构复杂,致使控制难度高,如含有摆动、旋转、偏心度调整及联动驱动机构,需要对气缸等实时精确控制合成最终运动,控制方法相对复杂、难度高,所需动力驱动装置多等问题,故仍需对现有动态平衡训练设备进行不断改进完善。
技术实现要素:
5.基于上述背景,本发明提供主被动混合的一种多态人体平衡训练系统。本发明通过以下技术方案来实现:
6.一种多态人体平衡训练系统,包括:主动部、传动部、驱动机构、支撑架、基板和踏板箱;
7.所述踏板箱、支撑架、驱动机构均装在基板上,主动部与传动部相连,主动部中心通过万向节与支撑架的顶端活动相连,主动部外周边与传动部上端可离合连接,传动部中部穿过踏板箱后下端依次通过伸缩万向节和连接座与驱动机构相连;所述踏板箱罩在驱动机构的外部;
8.驱动机构包括径向运动机构和周向运动机构,周向运动机构含有电机和由该电机驱动的一对啮合的齿轮,径向运动机构设置在所述啮合的齿轮中的从动齿轮之上并随从动齿轮一起运动,径向运动机构的运动部件上装有连接座,运动部件的运动轨迹线与从动齿轮的过中心直径相一致;从动齿轮与基板之间设有转座及万向球。转座设置在从动齿轮中心,多个万向球按圆周方向均匀分布在从动齿轮下方。
9.具体情况下,所述踏板箱设有箱体,箱体上部贴有防滑垫,箱体的上部中央开有碗座孔,碗座孔装有碗座,碗座较窄,为圆弧形的窄条带结构。
10.具体情况下,所述传动部下端设有传动孔,驱动机构依次通过连接座、伸缩万向节与传动部活动相连,伸缩万向节与传动孔为圆柱副配合连接,传动部上设有碗体,碗体外表面为球面,碗体外表面与踏板箱的碗座滑动接触。优选情况下,在所述传动部的碗体内壁还固定有角控块若干个,所述角控块有一定宽度,角控块内侧设有若干高度各异、厚度不同的台阶。
11.具体情况下,所述基板下设有移动脚轮。移动脚轮可为马福轮以方便移动或固定。
12.具体情况下,所述主动部包括脚踏平板、脚底板、传感器和压簧,所述脚踏平板与脚底板通过传感器相连接,脚底板上设有离合机构及压簧,脚底板通过所述离合机构或压簧与所述传动部相连,所述离合机构设有可伸缩的离合舌,离合舌控制脚底板与传动部的连接状态。
13.当主动部与传动部通过离合机构相连时,传动部可带动主动部进行运动从而驱动人体进行被动动态平衡训练,但传动部也可停止不动,人体站立在有一定倾角的主动部上进行静态平衡训练;当传动部与主动部通过压簧相连时,传动部停止运动,人体驱动主动部进行主动动态平衡训练。
14.具体情况下,本发明一种多态人体平衡训练系统还包括触屏一体机,踏板箱内设有电控板,驱动机构、离合机构及传感器与电控板电连接,电控板又与触屏一体机电相连,从而可获取传感器所采集到的信号及控制驱动机构和离合机构的运动。触屏一体机可为电容触摸屏一体机,可进行存储及输入、选择、设置等互动操作。
15.具体情况下,本发明一种多态人体平衡训练系统还包括立柱,所述立柱下端固定在基板上,所述立柱上设有扶手,扶手可调节高低,通过旋钮锁定在立柱上。
16.具体情况下,所述触屏一体机通过显示支架安装在立柱顶端。
17.具体情况下,本发明一种多态人体平衡训练系统还包括防护罩,所述防护罩设置在踏板箱与传动部之间,具有安全防护及限制传动部绕自身轴转动运动的作用。
18.具体情况下,所述主动部的中央还设有陀螺仪。
19.所述主动部的倾角α,由径向运动机构的运动部件离从动齿轮的(转动)中心轴线的距离r决定,计算公式为:α=arctan(r/h),其中h为高度(万向节中心点到径向运动机构的运动部件走过的轨迹线之间的距离),对既定设备h为常数。
20.本发明通过驱动机构的径向运动机构和周向运动机构控制,驱动传动部运动,进而通过离合机构控制主动部运动,其中,径向运动机构控制主动部上的脚踏平板的倾角,周向运动机构控制脚踏平板的朝向,使得最终本发明可实现被动态前后摆动、被动态左右摆动、被动态斜向摆动、被动态摇晃运动、被动态混合摇摆运动、主动态的人体动态平衡训练(含倾斜面和水平面两种)、主动态的人体静态平衡训练(含倾斜面和水平面两种)。
21.与现有技术相比,本发明的技术效果主要体现在以下方面:
22.1、集人体主被动、静动态、倾平面为一体,是拥有多态的多模式训练装置,从而一机多用,降低了成本,提高了设备利用率,让训练更丰富,使康复训练过程更高效。
23.2、采用底部驱动,克服现有旋转驱动装置与训练平台一起运动所造成的脚踏平板臃肿、对传感器测量造成的振动干扰等问题,驱动原理简洁,倾斜角度计算控制简便,角度
调节直观方便。
24.3、充分利用周向 径向的驱动机构及伸缩万向节,克服了现有主动训练机构设备过高,需要专门台阶和悬吊装置的缺陷。
25.4、扶手高度可调,一键锁定,适合不同患者身高需求和不同姿态下的扶手高度调节需求。
附图说明
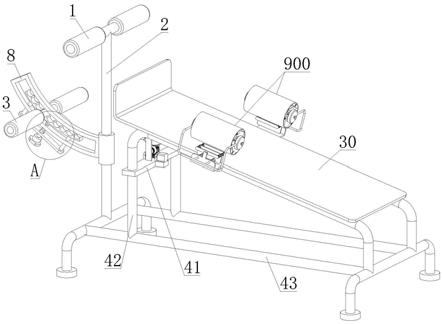
26.图1为本发明的整体结构示意图;
27.图2为图1的爆炸结构示意图;
28.图3为本发明的局部剖视图;
29.图4为图3的局部细节放大图;
30.图5为本发明中驱动机构的结构示意图;
31.图6为本发明中踏板箱的结构示意图;
32.图7为本发明中传动部的结构示意图;
33.图8(a)、(b)、(c)为本发明左右摆动的效果示意图;
34.图9(a)、(b)、(c)为本发明前后摆动的效果示意图;
35.图10(a)、(b)、(c)、(d)为本发明摇晃的效果示意图;
36.图11为本发明中主动部的结构示意图;
37.图12为本发明进行人体主动动态训练时的主动部摇摆的效果示意图;
38.图13为本发明主体结构在纵切面内的机构运动简图;
39.图14本发明中的主动部1及传动部4与支撑架6的组合关系图;
40.图15(a)、(b)为本发明中角控块对主动部进行角度控制的结构示意图。
41.图中标号所示:
42.1为主动部,101为脚踏平板,102为脚底板,103为传感器,104为压簧,105为离合机构,1051为离合舌,106为陀螺仪;
43.2为防护罩;
44.3为踏板箱,301为碗座,302为碗座孔,303为防滑垫,304为箱体;
45.4为传动部,401为离合槽,402为压簧座,403为传动孔,404为碗体;
46.5为万向节;
47.6为支撑架;
48.7为伸缩万向节;
49.8为连接座;
50.9为驱动机构,901为径向运动机构,902为周向运动机构,9011为运动部件,9021为从动齿轮;
51.10为转座;
52.11为万向球;
53.12为基板;
54.13为移动脚轮
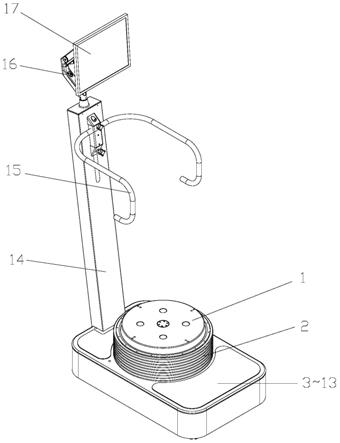
55.14为立柱;
56.15为扶手;
57.16为显示支架;
58.17为触屏一体机;
59.18为角控块,1801为台阶。
具体实施方式
60.下面结合附图和具体实施例对本发明进行详细说明。
61.参考图2、图3、图5,配合参见图1、图4、图14。本发明提供一种多态人体平衡训练系统,包括主动部1、传动部4、驱动机构9、支撑架6、基板12、防护罩2、踏板箱3、万向节5、伸缩万向节7、连接座8、转座10、万向球11、移动脚轮13、立柱14、扶手15、显示支架16、触屏一体机17。
62.所述踏板箱3、支撑架6、驱动机构9、立柱14均装在基板12上。移动脚轮13装在基板12下。主动部1中心通过万向节5与支撑架6的顶端活动相连,主动部1外周边与传动部4上端可离合连接,传动部4中部穿过踏板箱3后下端依次通过伸缩万向节7与连接座8与驱动机构9相连。
63.所述驱动机构9与基板12之间还设有转座10及万向球11。
64.所述防护罩2设置在踏板箱3与传动部4之间,具有安全防护及限制传动部4绕自身轴转动运动的功能。
65.所述立柱14上设有扶手15,所述触屏一体机17通过显示支架16安装在立柱14顶端,触屏一体机17通过显示支架16可调节前后、左右、高度及旋转角度,以方便训练者观看,扶手15可调节高低,通过旋钮锁定在立柱14上。触屏一体机17可为电容触摸屏一体机,可进行存储及输入、选择、设置等互动操作。
66.参考图5、图6、图7,配合参见图2、图3。所述驱动机构9包括径向运动机构901和周向运动机构902。周向运动机构902含有电机和由该电机驱动的一对啮合的齿轮,包括主动齿轮和从动齿轮9021。其中从动齿轮9021通过转座10安装在基板12上。周向运动机构902的电机设置在从动齿轮9021的侧边,转座10设置在从动齿轮9021中心。径向运动机构901设置在从动齿轮9021之上随从动齿轮9021一起运动,径向运动机构901采用电机驱动丝杠运动,运动部件9011安装在丝杠上,连接座8安装在运动部件9011上,由丝杠驱动做径向运动。运动部件9011的运动轨迹线与从动齿轮9021的一直径方向相一致,具体为运动部件9011的中心运动经过的轨迹线垂直投影到从动齿轮9021时与从动齿轮9021的一直径相合。采用上述驱动机构设置可有效降低踏板箱3的整体高度。从动齿轮9021与基板12之间进一步还设有多个万向球11,多个万向球11球朝上并按圆周方向均匀分布在从动齿轮9021下方,以便托着从动齿轮9021从而增加从动齿轮9021的承载力,最终为其上的径向运动机构901提供稳定的支撑。
67.踏板箱3设有箱体304,箱体304上部贴有防滑垫303,防滑垫303具有防滑作用,方便患者训练时的上下。箱体304的上部中央开有碗座孔302,碗座孔302装有碗座301,碗座301较窄,为圆弧形的窄条带结构。
68.传动部4下端设有传动孔403,传动孔403有一定的高度,驱动机构9依次通过连接座8、伸缩万向节7与传动部4活动相连,伸缩万向节7与传动孔403为圆柱副配合连接。传动
部4上设有,碗体404外表面为球面,碗体404外表面与踏板箱3的碗座301滑动接触。
69.基板12下设有移动脚轮13,移动脚轮13可为马福轮以方便移动或固定,踏板箱3罩在驱动机构9的外部,踏板箱3与基板12固接在一起。
70.参见图15(a)、(b),另外,在传动部4的碗体404内壁还固定有角控块18若干,所述角控块18有一定宽度,角控块18内侧设有若干高度各异、厚度不同的台阶1801,角控块18用来对主动部1的运动范围离散限位:当离合舌1051缩入量不同,因台阶1801厚度不同离合舌1051即可依次碰到角控块18高度各异的台阶1801,从而主动部1运动时相对传动部4的倾角范围离散可控。
71.参考图11、图15,配合参见图3。所述主动部1包括脚踏平板101、脚底板102、传感器103、压簧104。所述脚踏平板101与脚底板102通过传感器103相连接,脚底板102上设有离合机构105及压簧104,脚底板102通过所述离合机构105或压簧104与所述传动部4相连。离合机构105设有可伸缩的离合舌1051若干,离合舌1051控制脚底板102与传动部4的连接状态。离合机构105包括驱动电机、小齿轮、离合齿轮与离合舌1051。驱动电机轴与小齿轮固定相连,电机转动可带动小齿轮转动,小齿轮与离合齿轮啮合运动,离合齿轮上设有非同心的驱动凹槽,离合舌1051的后端与驱动凹槽活动连接,从而当离合齿轮转动时,可推动离合舌1051的前端伸出或缩入,以控制主动部1与传动部4的离合,且当离合齿轮转动角度变化时,离合舌1051的伸出或缩入量会随之改变。
72.当离合舌1051伸出,主动部1与传动部4通过离合机构105则相连,此时若驱动机构9通过伸缩万向节7驱动传动部4运动则可带动与之相连的主动部1进行运动,从而驱动人体进行被动动态平衡训练;若驱动机构9静止,则传动部4也可停止不动,从而与之相连的主动部1也静止不动,此时人体可站立在有一定倾角的主动部1上进行静态平衡训练。当离合舌1051缩入,离合机构105使主动部1外周边与传动部4脱离,此时传动部4与主动部1通过压簧104相连时,控制传动部4停止运动,人体则可驱动主动部1克服压簧104的阻力进行主动动态平衡训练,此时传动部4可能放平,也可能倾斜,如果传动部4倾斜则人体主动动态平衡训练所克服的压簧104的阻力各方向不均匀。
73.另外,踏板箱3内设有电控板,传感器103与电控板电连接,驱动机构9、离合机构105及传感器103与电控板电连接,电控板又与触屏一体机17电相连,从而可获取传感器103所采集到的信号及控制驱动机构9和离合机构105的运动。
74.另外,主动部1的中央还设有陀螺仪106,配合相关程序软件,陀螺仪106可实时监测主动部1的倾角角度及训练时的角速度、角加速度等。
75.本发明通过驱动机构9的径向运动机构901和周向运动机构902控制,驱动传动部4运动,进而通过离合机构105控制主动部1运动。其中,径向运动机构901控制主动部1上的脚踏平板101的倾角,周向运动机构902控制脚踏平板101的朝向。最终本发明可实现:
76.1、被动态的人体动态平衡训练
77.(1)被动态左右摆动:当周向运动机构902控制从动齿轮9021转动,把径向运动机构901相对人体左右放置时,周向运动机构902不动。径向运动机构901的运动部件9011周期往返运动的情况下,可通过传动部4驱动主动部1做左右摆动,进而带动人体进行左右摆动的被动动态平衡训练,此时人体重心在额状面内呈左右向的圆弧线运动。
78.被动态左右摆动的效果图如图8(a)、(b)、(c)所示。
79.若径向运动机构901的运动部件9011的行程不同,则主动部1的脚踏平板101的倾角变化范围随之不同,从而可控制训练角度变化范围,以适应不同患者、同一患者不同康复阶段的需求。主动部1的倾角α,由径向运动机构901的运动部件9011离从动齿轮9021的(转动)中心轴线的距离r决定,计算公式为:α=arctan(r/h),其中h为高度(万向节中心点到运动部件9011的轨迹线之间的距离——点到线的距离),对既定设备h为常数,其计算示意图如图13所示。
80.(2)被动态前后摆动:当周向运动机构902控制从动齿轮9021转动,把径向运动机构901相对人体前后放置时,周向运动机构902不动,径向运动机构901的运动部件9011周期往返运动的情况下,可通过传动部4驱动主动部1做前后摆动,进而带动人体进行前后摆动的被动动态平衡训练,此时人体重心在矢状面内呈前后向的圆弧线运动。
81.被动态前后摆动的效果示意图如图9(a)、(b)、(c)所示。
82.(3)被动态斜向摆动:当周向运动机构902控制从动齿轮9021转动,把径向运动机构901相对人体左前
‑
右后或右前
‑
左后斜向放置时,周向运动机构902不动,径向运动机构901的运动部件9011周期往返运动的情况下,可通过传动部4驱动主动部1做斜向的摆动,进而带动人体进行斜向摆动的被动动态平衡训练,此时人体重心呈斜向的圆弧线运动,圆弧线所在平面与矢状面或额状面成一定夹角。
83.(4)被动态摇晃运动:当径向运动机构901的运动部件9011停在一定位置不动,周向运动机构902控制从动齿轮9021做圆周旋转时,可通过传动部4驱动主动部1做圆周摇晃运动,进而带动人体进行被动摇晃运动的动态平衡训练,此时人体重心在水平面内呈圆周线运动。
84.被动态摇晃运动的效果示意图如图10(a)、(b)、(c)、(d)所示。
85.(5)被动态混合摇摆运动:当周向运动机构902控制从动齿轮9021转动,同时从动齿轮9021上的径向运动机构901的运动部件9011也控制在动的情况下,通过传动部4驱动主动部1做摇和摆的混合动,进而带动人体进行混合式的被动动态平衡训练,此时人体重心包括呈椭圆运动、多边形运动、花瓣形运动、放射线运动等。
86.2、主动态的人体动态平衡训练
87.径向运动机构901的运动部件9011停在从动齿轮9021的中心时,主动部1的脚踏平板101上表面水平,此时释放离合机构105的离合舌1051,主动部1与传动部4仅通过压簧104相连,即可进行人体主动动态平衡训练,当人体踩踏脚踏平板101时,通过传感器103将踏力传递到脚底板102,进而压缩压簧104,实现克服压簧104弹力进行人体抗阻的主动训练。人体主动动态平衡训练的主动部1等相关机构的效果示意图如图12所示。
88.当运动部件9011未停在从动齿轮9021的中心时,主动部1的脚踏平板101上表面倾斜,此时释放离合机构105的离合舌1051使主动部1与传动部4仅通过压簧104相连时,人体可进行主动动态平衡训练,但所克服的压簧104的阻力各方向不均匀。
89.配合传感器103、触屏一体机17及虚拟游戏,可反馈训练情况、进行互动虚拟游戏训练,提高患者训练的主动性和积极性,提升康复效果,促使尽早回归社会。
90.3、人体静态平衡训练
91.(1)脚踏平板水平放置:径向运动机构901的运动部件9011停在从动齿轮9021的中心时,主动部1的脚踏平板101上表面水平,此时闭合离合机构105的离合舌1051,使主动部1
的脚底板102与传动部4固定相连,压簧104不起作用,此时人体踩踏脚踏平板101即可进行人体静态平衡训练,训练平面为水平放置的脚踏平板101与脚底板102,脚踏平板101与脚底板102之间设有人体重心检测传感器103。
92.(2)脚踏平板倾斜一定角度:首先,径向运动机构901的运动部件9011停在从动齿轮9021的中心时,主动部1的脚踏平板101上表面水平,此时闭合离合机构105的离合舌1051,使主动部1的脚底板102与传动部4固定相连,压簧104不起作用;之后驱离运动部件9011不停在从动齿轮9021的中心,脚踏平板101及脚底板102与水平面呈一定夹角,此时人体踩踏脚踏平板101即可进行倾斜面的人体静态平衡训练。
93.本发明采用底部驱动,克服现有旋转驱动装置与训练平台一起运动所造成的脚踏平板臃肿、对传感器测量造成的振动干扰等问题;通过处理传感器信号可获得(人体)重心位置,且通过触屏一体机可实时反馈重心轨迹并做记录;是集主被动为一体、静动态训练为一体、倾斜
‑
水平面训练为一体的具有一机多用,利用率高等优点的综合性平衡训练系统。
94.上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。