技术特征:
1.一种通过机器人游戏化提高操作员绩效的方法,所述方法包括:将机器人停放在导航空间内的姿势位置;通过与交互式显示装置进行电子通信的传感器,识别位于靠近机器人的区域内的操作员,以获取要捡取的物品;在所述交互显示装置处接收与获取所述物品相关联的操作员绩效数据;以及响应于接收到的操作员绩效数据,在所述交互式显示装置上呈现游戏化绩效跟踪环境中操作员成就的至少一个图形表示。2.根据权利要求1所述的方法,其中,所述识别的步骤进一步包括:通过所述传感器读取所述操作员的id标签。3.根据权利要求2所述的方法,其中,所述id标签是无源rfid标签、有源rfid标签、蓝牙收发器或近场通信(nfc)信标中的至少一者。4.根据权利要求2所述的方法,其中,所述传感器是rfid阅读器、蓝牙收发器或nfc收发器中的至少一者。5.根据权利要求1所述的方法,其中,所述识别的步骤进一步包括:通过所述传感器捕获所述操作员的面部图像;以及将所捕获的面部图像与图像识别数据库进行比较。6.根据权利要求5所述的方法,其中,所述传感器是数码相机、数码摄像机、图像传感器、电荷耦合器件(ccd)或cmos传感器中的至少一者。7.根据权利要求1所述的方法,其中,所述识别的步骤进一步包括:通过所述传感器捕获所述操作员的声纹、所述操作员的视网膜图案或所述操作员的指纹图案中的至少一者;和将所捕获的操作员的声纹、所述操作员的视网膜图案或所述操作员的指纹图案中的至少一者与相应的用户标识数据库进行比较。8.根据权利要求1所述的方法,其中,所述传感器是成像装置、相机、摄像机、音频传感器、视网膜扫描仪、指纹扫描仪、红外扫描仪、条形码扫描仪或rfid阅读器中的至少一者。9.根据权利要求1所述的方法,其中,所述呈现的步骤进一步包括:在所述交互式显示装置上显示至少一个徽章。10.根据权利要求9所述的方法,其中,所述至少一个徽章是响应于由所述操作员实现的里程分而被呈现的。11.根据权利要求10所述的方法,其中,所述里程分包括以下各项中的至少一项:由所述操作员捡取的预定义数量的单元、所述操作员的预定义捡取率、在所述导航空间内捡取的预定义数量的单元、所述导航空间内的预定义的聚合捡取率、或者在不扫描错误单元的情况下捡取的预定义数量的单元。12.根据权利要求1所述的方法,其中,所述呈现的步骤进一步包括:在所述交互式显示装置上显示至少一个绩效表。13.根据权利要求12所述的方法,其中,所述绩效表被配置为指示所述操作员的相对于绩效目标或标准的绩效。14.根据权利要求13所述的方法,其中,所述绩效目标或标准包括以下各项中的至少一项:由所述操作员捡取的预定义数量的单元、所述操作员的预定义捡取率、在所述导航空间
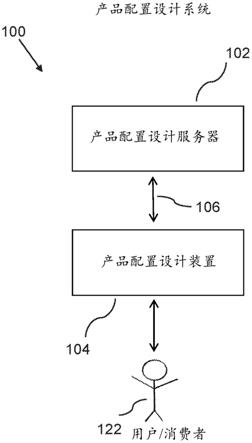
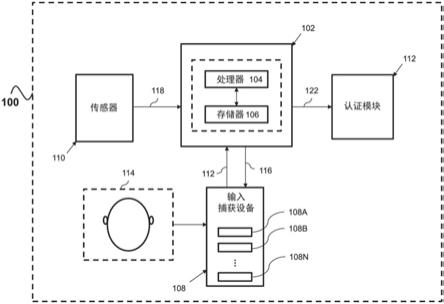
内捡取的预定义数量的单元、所述导航空间内的预定义聚合捡取率、或者在不扫描错误单元的情况下捡取的预定义数量的单元。15.根据权利要求12所述的方法,其中,所述绩效表是虚拟刻度表、彩色编码照明区域、分段条形表或实心条形表中的至少一者。16.根据权利要求1所述的方法,其中,所述呈现的步骤进一步包括:在所述交互式显示装置上显示至少一个排名图表。17.根据权利要求16所述的方法,其中,所述排名图表被配置为指示所述操作员的相对于一个或更多个其他操作员的关于竞争性度量的绩效。18.根据权利要求17所述的方法,其中,所述绩效目标或标准包括以下各项中的至少一项:捡取任务之间的最快平均时间、完成捡取任务的最快平均时间、捡取率、操作员连续出勤天数、在不扫描错误物品的情况下捡取的连续单元、或者在一天中与所述操作员交互的最大数量的机器人。19.一种通过机器人游戏化提高操作员绩效的系统,所述系统包括:机器人,所述机器人被停放在导航空间内的姿势位置;交互式显示装置,所述交互式显示装置与所述机器人进行电子通信;以及传感器,所述传感器与所述交互式显示装置进行电子通信,其中,所述交互式显示装置包括:处理器;以及存储器,所述存储器存储有指令,所述指令当被所述处理器执行时使所述交互式显示装置进行以下操作:识别位于所述机器人附近区域内的操作员,以获取要捡取的物品;接收与获取所述物品相关的操作员绩效数据;以及响应于接收到的操作员绩效数据,在所述交互式显示装置上呈现在游戏化绩效跟踪环境中操作员成就的至少一个图形表示。
技术总结
提供了用于通过机器人游戏化提高操作员绩效的方法,所述方法包括:将机器人停放在导航空间内的姿势位置;通过与交互式显示装置进行电子通信的传感器,识别位于靠近机器人的区域内的操作员,以获取要捡取的物品;在交互显示装置处接收与获取物品相关联的操作员绩效数据;以及响应于接收到的操作员绩效数据,在交互式显示装置上呈现游戏化绩效跟踪环境中操作员成就的至少一个图形表示。操作员成就的至少一个图形表示。操作员成就的至少一个图形表示。
技术研发人员:迈克尔
受保护的技术使用者:轨迹机器人公司
技术研发日:2020.01.20
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。