用于提高操作员绩效的机器人游戏化
1.相关申请的交叉引
2.本技术要求于2019年1月21日提交的美国申请16/252856的优先权,该申请是2016年8月17日提交的标题为“使用操作员交互偏好的操作员机器人交互”的美国申请第15/239133号的部分继续申请,该申请为2015年7月31日提交的第14/815110号美国申请的继续申请,现为于2019年2月5日授权的标题为“操作员识别和绩效跟踪”美国专利号10/198706;通过引用将上述申请的内容并入本文。
技术领域
3.本发明涉及机器人游戏化,更具体地说,涉及用于提高操作员绩效的机器人游戏化。
背景技术:
4.通过互联网订购送货上门的产品是一种非常流行的购物方式。至少可以说,及时、准确、高效地完成此类订单在后勤方面具有挑战性。单击虚拟购物车中的“结帐”按钮会创建一个“订单”。该订单包括要发送到特定地址的项目列表。“履行”的过程包括从大型仓库中实际提取或“捡取”这些物品,打包并将其运送到指定的地址。因此,订单履行流程的一个重要目标是在尽可能短的时间内运送尽可能多的物品。
5.订单履行过程通常发生在包含许多产品(包括订单中列出的产品)的大型仓库中。因此,订单履行的任务之一是遍历仓库以查找和收集订单中列出的各种物品。此外,最终将首先装运的产品需要在仓库中接收,并在整个仓库中以有序的方式存储或“放置”在储物箱中,以便随时捡取进行装运。
6.在大型仓库中,正在交付和订购的货物可以存储在彼此相距很远的仓库中并且分散在大量其他货物中。对于仅使用人类操作员放置和捡取货物的订单履行流程,操作员需要进行大量步行,并且效率低下且耗时。由于履行过程的效率是单位时间内运送的物品数量的函数,因此增加时间会降低效率。
7.此外,由于仓库捡取的重复性、高节奏性,人类操作员可能容易感到无聊、认知脱离、疲劳和仓促引起的错误。所有这些症状都会导致拣货执行效率进一步降低。
技术实现要素:
8.技术问题
9.为了提高捡取效率,机器人可用于执行人类的功能,或用于补充人类的活动。例如,机器人可以被分配到分散在整个仓库的不同位置“放置”大量物品,或者从不同位置“捡取”物品进行包装和装运。捡取和放置可以由机器人单独完成,也可以在操作员的协助下完成。例如,在捡取操作的情况下,人类操作员将从货架上捡取物品并将其放置在机器人上,或者在放置操作的情况下,人类操作员将从机器人上捡取物品并将其放置在货架上。
10.如上所述,如果人类操作员屈服于降低效率的行为,如无聊、认知脱离、疲劳和匆
忙导致的错误,则此类效率可能会降低或受到威胁。因此,对人类操作员参与度、兴趣和绩效的积极管理可以进一步提高捡取效率。
11.因此,在机器人与人类操作员交互的范围内,机器人可配置为呈现捡取过程的游戏化(gamification),以进一步吸引操作员,并防止或减少绩效消耗症状,如无聊、认知脱离、疲劳和匆忙导致的错误。
12.本文提供了用于机器人游戏化的方法和系统,以提高操作员的绩效。
13.在一个方面,本发明的特征在于,一种通过机器人游戏化提高操作员绩效的方法,所述方法包括:将机器人停放在导航空间内的姿势位置;
14.通过与交互式显示装置进行电子通信的传感器,识别位于靠近机器人的区域内的操作员,以获取要捡取的物品;在交互显示装置处接收与获取物品相关联的操作员绩效数据;和响应于接收到的操作员绩效数据,在交互式显示装置上呈现游戏化绩效跟踪环境中操作员成就的至少一个图形表示。
15.在一些实施例中,识别步骤还包括由传感器读取操作员的id标签。在一些实施例中,id标签是无源rfid标签、有源rfid标签、蓝牙收发器或近场通信(nfc)信标中的至少一者。在一些实施例中,传感器是rfid阅读器、蓝牙收发器或nfc收发器中的至少一者。在一些实施例中,识别步骤还包括由传感器捕获操作员的面部图像。在一些实施例中,识别步骤还包括将捕获的面部图像与图像识别数据库进行比较。在一些实施例中,传感器是数字相机、数字摄像机、图像传感器、电荷耦合器件(ccd)或cmos传感器中的至少一者。在一些实施例中,识别步骤还包括由传感器捕获操作员的声纹、操作员的视网膜图案或操作员的指纹图案中的至少一者。在一些实施例中,识别步骤还包括将捕获的操作员的声纹、操作员的视网膜图案或操作员的指纹图案中的至少一个与相应的用户识别数据库进行比较。在一些实施例中,传感器是成像设备、相机、摄像机、音频传感器、视网膜扫描仪、指纹扫描仪、红外扫描仪、条形码扫描仪或rfid阅读器中的至少一者。
16.在一些实施例中,呈现步骤还包括在交互式显示设备上显示至少一个徽章。在一些实施例中,响应于操作员实现的里程碑呈现至少一个徽章。在一些实施例中,所述里程碑包括以下各项中的至少一项:由所述操作员捡取的预定义数量的单元、所述操作员的预定义捡取率、在所述导航空间内捡取的预定义数量的单元、所述导航空间内的预定义的聚合捡取率、或者在不扫描错误单元的情况下捡取的预定义数量的单元。在一些实施例中,呈现步骤还包括在交互式显示设备上显示至少一个绩效表。在一些实施例中,绩效表被配置为指示操作员相对于绩效目标或标准的绩效。在一些实施例中,所述绩效目标或标准包括以下各项中的至少一项:由所述操作员捡取的预定义数量的单元、所述操作员的预定义捡取率、在所述导航空间内捡取的预定义数量的单元、所述导航空间内的预定义聚合捡取率、或者在不扫描错误单元的情况下捡取的预定义数量的单元。在一些实施例中,绩效表是虚拟刻度表、彩色编码照明区域、分段条形表或实心条形表中的至少一者。在一些实施例中,呈现步骤还包括在交互显示设备上显示至少一个排名图表。在一些实施例中,排名图被配置为指示操作员相对于一个或多个其他操作员相对于竞争度量的绩效。在一些实施例中,所述绩效目标或标准包括以下各项中的至少一项:捡取任务之间的最快平均时间、完成捡取任务的最快平均时间、捡取率、操作员连续出勤天数、在不扫描错误物品的情况下捡取的连续单元、或者在一天中与之交互的最大数量的机器人。
17.在另一方面,本发明的特征在于,一种通过机器人游戏化提高操作员绩效的系统,所述系统包括:停放在导航空间内姿势位置的机器人;与所述机器人进行电子通信的交互式显示装置;和与所述交互式显示装置进行电子通信的传感器,其中,所述交互式显示装置包括:处理器;和存储指令的存储器,当所述处理器执行该指令时,使所述交互式显示装置进行以下操作:识别位于所述机器人附近区域内的操作员,以获取要捡取的物品;接收与所述物品获取相关的操作员绩效数据;和响应于接收到的操作员绩效数据,在所述交互式显示装置上呈现游戏化绩效跟踪环境中操作员成就的至少一个图形表示。
18.本发明的这些和其他特征将从以下详细说明和附图中显而易见,其中:
附图说明
19.图1是订单履行仓库的俯视平面图平面图;
20.图2a是图1所示仓库中使用的一个机器人底座的正视图;
21.图2b是图1所示仓库中使用的一个机器人底座的透视图;
22.图3是图2a和图2b中的配备有电枢并且停放在图1中所示的搁架的前方的机器人的透视图;
23.图4是使用机器人上的激光雷达创建的图1仓库的局部地图;
24.图5是描述用于定位分散在整个仓库中的基准标记并存储基准标记姿势的过程的流程图;
25.图6是基准识别到姿势映射的表;
26.图7是仓位置到基准识别映射的表;
27.图8是描述产品sku到姿势映射过程的流程图;
28.图9是示出图3所示的机器人的平板电脑的架构的框图;
29.图10是由图9所示的平板电脑执行的过程的流程图;
30.图11是示出图3所示的机器人的替代平板电脑的架构的框图;
31.图12是示出在图3所示的机器人的平板电脑上呈现的示例游戏化显示的图;
32.图13是在图3的机器人中实现的示例性计算系统的框图;和
33.图14是可在本文所述的仓库操作中使用的示例性分布式网络的网络图。
具体实施方式
34.参考在附图中描述和/或图示以及在以下描述中详述的非限制性实施例和示例,更全面地解释本公开及其各种特征和有利细节。应当注意,附图中所示的特征不一定按比例绘制,并且本领域技术人员将认识到一个实施例的特征可以与其他实施例一起使用,即使这里没有明确说明。可以省略对众所周知的组件和处理技术的描述,以免不必要地混淆本公开的实施例。在此使用的示例仅旨在促进对可以实践本公开的方式的理解并且进一步使本领域技术人员能够实践本公开的实施例。因此,此处的示例和实施例不应被解释为限制本公开的范围。此外,应注意,贯穿附图的若干视图,相同的附图标记表示相同的部件。
35.本发明涉及用于改进操作员绩效的机器人游戏化。尽管不限于任何特定的机器人应用,但本发明可用于的一种合适的应用是订单履行。本技术中机器人的使用将被描述为区域引擎提供上下文,但不限于该应用。
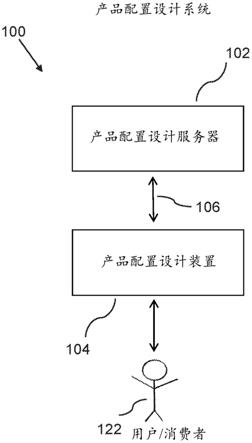
36.参考图1,典型的订单履行仓库10包括货架12,货架上装满了可以包含在订单中的各种物品。在操作中,来自仓库管理系统15的输入订单流16到达订单服务器14。订单服务器14可以对订单进行优先级排序和分组,以便在导入过程中分配给机器人18。当操作员引导机器人时,在处理站(例如,站100),命令16被分配并以无线方式传送给机器人18以执行。本领域技术人员将理解,订单服务器14可以是具有离散软件系统的独立服务器,离散软件系统被配置为与仓库管理系统服务器15和仓库管理软件互操作,或者订单服务器功能可以集成到仓库管理软件中并在计算机上运行仓库管理系统15。
37.在优选实施例中,机器人18,如图2a和2b所示,包括具有激光雷达22的自主轮式底座20。底座20还具有使机器人18能够从订单服务器14和/或其他机器人接收指令并向其发送数据的收发器(未显示),以及一对数字光学相机24a和24b。机器人底座还包括充电端口26,用于为自主轮式底座20的电池充电。底座20还具有处理器(未示出),其从激光雷达和相机24a和24b接收数据以捕获信息代表机器人的环境。存在与处理器一起操作以执行与仓库10内的导航相关联的各种任务以及导航到放置在货架12上的基准标记30的存储器(未示出),如图3所示。基准标记30(例如,二维条形码)对应于订购物品的仓/位置。下面参考图4至图8详细描述本发明的导航方法。基准标记也用于识别充电站,并且对这样的充电站基准标记的导航与对订购的物品的仓/位置的导航相同。一旦机器人导航到充电站,就使用更精确的导航方法来将机器人与充电站对接。
38.再次参考图2b,底座20包括上表面32,在该上表面32处可以存放容器(tote)或仓以携带物品。图中还示出了接合多个可互换电枢40中的任何一个的联接器34,其中一个可互换电枢40在图3中示出。图3中的特定电枢40具有用于携带接收物品的容器44的容器支架42(在这种情况下是搁板)和用于支撑平板电脑48的平板电脑支架46(或膝上型电脑/其他用户输入装置)。在一些实施例中,电枢40支持一个或更多个用于携带物品的容器。在其他实施例中,底座20支撑一个或更多个用于携带接收物品的容器。如本文所用,术语“容器”包括但不限于货架、仓、笼子、货架、可悬挂物品的杆、球童、板条仓、货架、机架、支架、容器、盒子、罐、容器和存储库。
39.使用当前的机器人技术,由于与物体的机器人操纵相关联的功能困难,快速且有效地从货架捡取物品并将其放置在容器44中在技术上具有挑战性。因此,目前,一种更有效的捡取物品的方式是使用本地操作员50(通常是人类)来执行从货架12物理移除订购的物品并将其放置在机器人18上的任务,例如,在容器44中,机器人18通过本地操作员50可以读取的平板电脑48(或膝上型电脑/其他用户输入装置)或通过将订单发送给本地操作员使用的手持装置来将订单传达给本地操作员50。
40.当从订单服务器14接收到订单16时,机器人18前进到第一仓库位置,如图3所示。它基于存储在存储器中并由处理器执行的导航软件进行操作。导航软件依赖于由激光雷达22收集的有关环境的数据、识别与仓库10中可以找到特定物品的位置相对应的基准标记30的基准标识(“id”)的存储器中的内部表、以及用于导航的24a和24b。
41.在到达正确的位置(姿势)后,机器人18将自身停在存放物品的货架12前面,等待本地操作员50从货架12捡取物品,并将其放置在容器44中。如果机器人18有其他物品要捡取,则机器人18将前进到这些位置。然后,机器人18捡取的物品被运送到处理站100,如图1所示,在那里进行包装和装运。虽然已经参照该图将处理站100描述为能够引导和卸载/包
装机器人,但其可被配置为在站处导入或卸载/包装机器人,即,它们可被限制为执行单个功能。
42.本领域技术人员应当理解,每个机器人可以执行一个或更多个订单,并且每个订单可以由一个或更多个项目组成。通常,将包括某种形式的路由优化软件以提高效率,但这超出了本发明的范围,因此在此不进行描述。
43.为了简化本发明的描述,描述了单个机器人18和操作员50。然而,从图1中可以明显看出,典型的履行操作包括许多机器人和操作员在仓库中相互工作以填充连续的订单流。
44.下面参考图4至图8详细描述本发明的基线导航方法以及要捡取的物品的sku到与物品所在的仓库中的基准标记相关联的基准id/姿势的语义映射。
45.使用一个或更多个机器人18,必须创建仓库10的地图,并且必须确定分散在整个仓库中的各种基准标记的位置。为此,一个或更多个机器人18在仓库中导航时,利用其激光雷达22和同步定位和映射(slam)构建/更新图4的地图10a,这是构建或更新未知环境地图的计算问题。流行的slam近似解决方案方法包括粒子滤波器和扩展卡尔曼滤波器。slam g测绘方法是优选方法,但可使用任何合适的slam方法。
46.机器人18利用其激光雷达22创建仓库10的地图10a,因为机器人18在整个空间中移动,根据激光雷达扫描环境时接收到的反射,识别空间中的开放空间112、墙壁114、物体116和其他静态障碍物,如货架12。
47.在构建地图10a(或随后进行更新)的同时,一个或更多个机器人18使用摄像机26在仓库10中导航,以扫描环境,定位分散在整个仓库中的基准标记(二维条形码),这些标记位于货架附近的仓上,如图3中存储物品的32和34。机器人18使用已知起点或原点作为参考,如原点110。当基准标记(如基准标记30)出现时,参照图3和图4,机器人18使用其摄像机26定位,确定仓库中相对于原点110的位置。
48.通过使用车轮编码器和航向传感器,可以确定矢量120和机器人在仓库10中的位置。使用基准标记/二维条码的捕获图像及其已知尺寸,机器人18可以确定基准标记/二维条码的机器人相对于矢量130的方向和距离。已知矢量120和130时,可以确定原点110和基准标记30之间的矢量140。根据向量140和确定的基准标记/二维条形码相对于机器人18的方向,可以确定由基准标记30的四元数(x,y,z,ω)定义的姿势(位置和方向)。
49.图5中的流程图200描述了基准标记定位过程。这是在初始映射模式中执行的,并且当机器人18遇到仓库中的新基准标记时,同时执行捡取、放置和/或其他任务。在步骤202中,机器人18使用相机26捕捉图像,并且在步骤204中在所捕捉的图像内搜索基准标记。在步骤206中,如果在图像中找到基准标记(步骤204),则确定基准标记是否已经存储在位于机器人18的存储器34中的查找表300(图6)中。如果基准信息已经存储在存储器中,流程图返回到步骤202以捕获另一图像。如果不在存储器中,则根据上述过程确定姿势,并在步骤208中,将其添加到基准到姿势查找表300。
50.在可以存储在每个机器人的存储器中的查找表300中,对于每个基准标记包括基准标识1、2、3等,以及与每个基准标识相关联的基准标记/条形码的姿势。姿势由仓库中的x、y、z坐标以及方向或四元数(x,y,z,ω)组成。
51.在另一个查找表400中,也可以存储在每个机器人的存储器中的图7是仓库10内的
仓位置(例如402a
‑
f)的列表,其与特定的基准id相关404,例如数字“11”。在本例中,仓位置由七个字母数字字符组成。前六个字符(例如l01001)与仓库内的货架位置有关,并且最后一个字符(例如,a
‑
f)标识货架位置处的特定仓。在该示例中,存在与基准id“11”相关联的六个不同的仓位置。可以存在与每个基准id/标记相关联的一个或更多个仓。
52.字母数字仓位置对于人类来说是可以理解的,例如,图3的操作员50对应于仓库10中存储物品的物理位置。然而,它们对机器人18没有意义。通过将位置映射到基准id,机器人18可以使用图6的表300中的信息确定基准id的姿势,然后导航到该姿势,如本文所述。
53.图8的流程图500中描述了根据本发明的订单履行过程。在步骤502中,订单服务器14从仓库管理系统15获取订单,该订单可以由要捡取的一个或更多个物品组成。应注意,订单分配过程相当复杂,超出了本公开的范围。在2016年9月1日提交的标题为“仓库订单履行操作中的订单分组”的共同拥有的美国专利申请序列号15/807672中描述了一种这样的订单分配过程,该专利申请通过引用整体并入本文。还应该注意的是,机器人可能有容器阵列,允许单个机器人执行多个订单,每个仓或隔间一个订单。在2016年9月1日提交的题为“机器人辅助订单履行操作中的移动底座的物品存储阵列”的美国专利申请序列号15/254321中描述了此类容器阵列的示例,该申请通过引用整体并入本文。
54.继续参考图8,在步骤504中,物品的sku编号由仓库管理系统15确定,并且根据sku编号,在步骤506中确定仓位置。然后将订单的仓位置的列表发送给机器人18。在步骤508中,机器人18将仓位置与基准id相关联,并且在步骤510中,从基准id中获得每个基准id的姿势。在步骤512中,机器人18导航到如图3所示的姿势,在该姿势中,操作员可以从适当的仓中捡取要捡取的物品并将其放置在机器人上。
55.由仓库管理系统15/订单服务器14获得的物品特定信息,诸如sku编号和仓位置,可以发送给机器人18上的平板电脑48,使得当机器人到达每个基准标记位置时,可以向操作员50通知要捡取的特定物品。
56.通过slam地图和基准id的已知姿势,机器人18可以使用各种机器人导航技术轻松导航到基准id的任何一个。优选方法涉及在已知仓库10中的开放空间112、墙壁114、货架(例如货架12)和其他障碍物116的情况下设置基准标记姿势的初始路线。当机器人开始使用其激光雷达26穿过仓库时,它确定其路径中是否存在任何固定或动态障碍物,例如其他机器人18和/或操作员50,并迭代地将其路径更新为基准标记的姿势。机器人大约每50毫秒重新规划一次路线,在避开障碍物的同时不断寻找最有效的路径。
57.通过产品sku/基准id到基准姿势映射技术与这里描述的slam导航技术相结合,机器人18能够非常高效和有效地导航仓库空间,而不必使用通常使用的更复杂的导航方法,这些导航方法涉及网格线和中间基准标记以确定仓库内的位置。
58.操作员识别和绩效跟踪
59.如上所述,典型地,在到达正确位置(姿势)时,机器人18将自身停在存放物品的货架12前面,并等待本地操作员50从货架12捡取物品并将其放入容器44中。参考图9和10,对于机器人18和本地操作员50之间的每次捡取交互,机器人18可以被配置为识别本地操作员50并跟踪与捡取交互相关联的捡取绩效。
60.特别地,一旦机器人18停在接近基准30的正确姿势位置,机器人18可以询问与机器人18通信的数据库的数据库时钟以确定机器人18停在接近基准标记30的姿势的时间(图
10方法600的步骤601)。然后,机器人可以在数据库中创建姿势到达时间的记录(步骤603)。在一些实施例中,代替询问数据库时钟,机器人18可以使数据库定时器开始计时。在任一情况下,无论哪种情况,目标都是确定机器人18等待的时间。
61.在一些实施例中,与机器人18通信的数据库可以是远程独立数据库。在一些实施例中,数据库可并入wms 15或订单服务器14的存储器中,数据库可并入平板电脑48中。在此类实施例中,平板电脑处理器52随后可询问平板电脑时钟54,以确定机器人18停在接近基准标记30的姿势的时间(图10方法600的步骤601)。平板电脑处理器52随后可以在平板电脑存储器58中创建姿势到达时间的记录56(步骤603)。在一些实施例中,平板电脑处理器52可以代替询问平板电脑时钟54,而使平板电脑计时器60开始计时。
62.通常,在机器人18停在该姿势后,本地操作员50将看到机器人18并朝它走。然后,本地操作员50检查平板电脑48以确定应捡取哪个物品,从货架12捡取该物品,并将其放置在机器人18上,例如,放入容器44中。在一些实施例中,在完成捡取任务后,当物品已放置在机器人18上时,机器人18可以重新询问数据库时钟或停止数据库计时器以确定在每个姿势花费的停留时间。
63.在一些实施例中,机器人18可以包括接近传感器62。在一些实施例中,接近传感器62可以被配置为检测接近机器人18的任何本地操作员50。如图3所示,当本地操作员50进入机器人18周围的接近区66时,接近传感器62可以检测本地操作员50携带或佩戴的标签64(步骤605)。此类标签64可以包括有源或无源rfid标签、蓝牙装置、近场通信(nfc)装置、蜂窝电话、智能电话或任何其他合适的装置。
64.再次参考图9和10,在本地操作员50携带标签64的情况下,接近传感器62随后将关于标签64的信息传送到数据库(步骤607)。然后,数据库将记录更新为与标签64相关联的文档标识信息。如果需要,机器人还可以记录本地操作员50进入区域的时间(步骤609)。
65.然后,本地操作员50检查平板电脑48以确定应捡取哪个物品。或者,机器人18(例如,通过平板电脑48)可以向本地操作员50使用的手持装置发送关于要捡取的物品的信息。然后,本地操作员50从货架12捡取物品,并将物品放入容器44中,此时,机器人18指示任务完成,并重新询问数据库时钟或停止数据库计时器以确定机器人18在该姿势的停留时间。然后,本地操作员50离开区域66。
66.在一些实施例中,可以定位机器人18的姿势位置,使得本地操作员50不必离开区域66来捡取物品。为此,更一般而言,区域66的尺寸可根据特定应用而变化。例如,在一些实施例中,区域66的直径约为1至2米,以机器人18的位置为中心。
67.如果需要,接近传感器62可以检测本地操作员50(以及,如果适用,伴随的标签64)离开区域66(步骤611),并更新记录56以反映离开时间(步骤613)。在本地操作员50离开区域66后,机器人18接着移动到其下一个目的地(步骤615),该目的地可以是另一个货架12或用于结账的包装站。
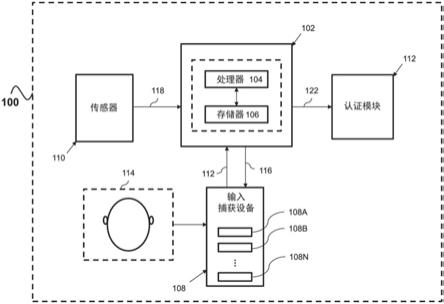
68.在图11所示的其他实施例中,本地操作员50不需要携带用于机器人48的识别标签64以检测区域66内的本地操作员50。相反,平板电脑48耦合到车载识别系统86。例如,如图11所示,车载识别系统86包括识别系统88,该识别系统被配置为从用户识别装置90接收识别信息,并且还被配置为查询识别数据库92以识别本地操作员50。例如,在一些实施例中,用户识别装置90可包括成像装置(例如,具有诸如电荷耦合装置(ccd)或cmos传感器之类的
图像传感器)、相机、摄像机、音频传感器、视网膜扫描仪、指纹扫描仪、红外扫描仪、条形码扫描仪或其组合中的一个或更多个。在一些实施例中,识别数据库92可包括面部识别数据库、视网膜数据库、语音模式数据库、指纹数据库、条形码数据库或其组合。
69.不管本地操作员识别方法如何,机器人18都可以将捡取和任何相关联的本地操作员绩效数据与对应的本地操作员id和/或本地操作员账户相关联。然后,平板电脑48收集的数据可以在获取时实时传输到仓库管理系统15和/或订单服务器14,或者定期传输到与本地操作员id/帐户关联存储的本地操作员绩效数据。由此收集的数据为跟踪、激励和潜在奖励本地操作员50以及与机器人18交互的任何其他本地操作员的绩效提供了基础。
70.除了评估绩效外,平板电脑48收集的数据,特别是本地操作员识别数据,可由仓库管理系统15用于安全目的,以确定本地操作员50是否是授权的本地操作员,是否被授权执行在仓库的特定区域运营,或为特定的本地操作员运营。此外,识别数据可用于设置本地操作员50的偏好,例如平板电脑48使用的语言。
71.在全系统范围内,与多个机器人18和多个本地操作员50之间的多个交互相对应的数据(例如,在仓库中,有一组机器人18,每个机器人18在仓库内的各个位置与多个仓库分拣员本地操作员50交互)。因此,例如,如图1所示,所有其他机器人18也从与其交互的操作员50收集数据,并将数据传输到管理服务器84。因此,该数据可供管理层使用,以阻止未受监督的本地操作员50表现不佳,或者相反,为奖励表现良好的本地操作员提供依据。
72.由机器人18收集并传送到仓库管理系统15的指示本地操作员活动的数据包括关于以下一项或多项的信息:机器人18到达姿势后操作员进入区域66的时间量,操作员50进入区域后离开区域66所需的时间量,以及操作员50执行定义功能所需的时间量,例如从货架12捡取物品并放置在机器人18上或从机器人18中捡取物品并将其放在货架12上。
73.通过使用此类数据,仓库管理系统15可以被配置为至少部分地基于收集的指示本地操作员活动的信息来跟踪本地操作员效率。管理服务器15可以被配置为至少部分地基于该信息来维护仓库统计。收集/计算的操作员效率和其他统计数据可被用作激励以提高操作员绩效或以其他方式由管理层使用。例如,在一定程度上,特定姿势与操作员执行捡取功能的异常长的时间、操作员进入和离开区域66之间的异常长的时间或到达姿势和操作员进入区域66之间的异常长的时间相关联,管理服务器15和/或订单服务器14可以更新姿势位置以提高与相应货架位置的接近度和/或提高机器人的可见性。
74.机器人游戏化
75.如上所述,由于仓库捡取的重复、高节奏的性质,诸如本地操作员50的人类操作员可能容易感到无聊、认知脱离、疲劳和仓促引起的错误,从而负面影响捡取效率和整体仓库输出。为了减少和防止这种症状,在一些实施例中,机器人18的游戏化可以被实施以认知地参与操作员50、奖励操作员50的成就以及提供操作员50之间的竞争。特别地,游戏化用于实时地改进对操作员绩效的感知,鼓励用户发挥高水平并提供潜在的激励。
76.如图12所示,在一些实施例中,游戏化可以至少部分地经由平板电脑48的显示器700呈现给操作员50。特别地,如图12所示,显示器700可包括与操作员50相对应的当前员工绩效的一个或更多个指示器。此类绩效指示器可包括例如徽章701、绩效表703、排名(赛马式)图表705、彩色编码照明部分707或其组合。还将显而易见的是,图12中所示的显示700元素仅用于说明目的,并且在一些实施例中,可以向操作员提供额外的文本数据、数字数据、
替代图形或其他与游戏化相关的对象。例如,在一些实施例中,操作员50可以查询设施中任何操作员实现的一个或更多个有史以来最高捡取率(单位/小时)、操作员50实现的有史以来最高捡取率、设施中任何操作员50实现的一天、一周、一个月、一季度、一年或任何其他时间窗口内实现的最高捡取率,操作员在一天、一周、一个月、一季度、一年或任何其他时间窗口内实现的最高捡取率,设施中任何操作员在一小时、一天、一周、一个月、一季度、一年或任何其他时间窗口内捡取的最高单元数,操作员在一小时、一天、一周、一个月、一季度、一年或任何其他时间窗口内捡取的最高单元数50,平均操作员50捡取率,操作员50捡取的所有时间单元数,所有操作员的平均捡取率,所有操作员在设施内捡取的总单元数,无论是在任何时间还是在一天、一周内,一个月、一个季度、一年或任何其他时间窗口,所有操作员设施中的平均总捡取率,无论是在任何时间内,还是在一天、一周、一个月、一个季度、一年或任何其他时间窗口内,或任何其他适当的绩效数据。尽管以上所述的许多绩效数据是根据所捡取的一般术语“单位”进行测量的,但鉴于本公开内容,这里使用的术语“单位”(除非另有说明)显然可以指实际捡取的单个产品单位、捡取的多个订单行,已捡取的总订单数量,或用于评估捡取量的任何其他合适量词。
77.在一些实施例中,徽章701可以在实现一个或更多个里程碑时授予操作员50。里程碑可以包括,例如,操作员50或整个设施捡取的单元数(例如,1,000、10,000、100,000、1,000,000或任何其他数量的单元),操作员50或整个设施中的一个在一个或更多个预定时间段内保持预定捡取率,操作员50或整个设施实现个人最佳捡取率,操作员50全勤,操作员50之一或整个设施在预定时间内进行无差错捡取(例如,不捡取错误项目),或任何其他合适的里程碑或成就。
78.在一些实施例中,绩效表703可指示操作员50相对于一个或更多个操作员特定目标或标准、设施范围目标或标准、对等绩效或其组合的绩效。例如,用户可具有80u/hr(单位/小时)的目标捡取速率,其可与平均或中等绩效的指示(例如,图12中所示的绩效表703上的“平均”)相关联。然后,绩效表703可以基于操作员的50个实际捡取率,指示绩效是“坏”、“差”、“平均”、“好”还是“优秀”。例如,在一些实施例中,坏可以是小于65u/hr的任何捡取速率,差可以是65到75u/hr之间的任何捡取速率,平均可以是75到85u/hr之间的任何捡取速率,好可以是85到95u/hr之间的任何捡取速率,优秀可以是大于95u/hr的任何捡取速率。然而,鉴于本发明,绩效表703可以是任何合适的图形(例如,如图所示的千分表、分段条、实心条或任何其他合适的图形),并且可以包括颜色、灰度、文本、图像或其任何数量和组合,以传达操作员50的绩效状态。鉴于本公开内容,将更加明显的是,尽管显示为包括标记为“坏”、“差”、“平均”、“好”和“优秀”的五个绩效类别,但绩效表703可以具有任意数量的段,类别、其他绩效指标或其组合,并且这些细分、类别、其他绩效指标或其组合可以不加标签或使用所需的任何合适标签进行标记。
79.与绩效表703类似,彩色编码照明部分707也可用于指示操作员50和/或整个设施(或其子集)的绩效。具体地,与如关于绩效表703所示的千分表图形不同,彩色编码部分707可以相对于被测量的绩效改变颜色。例如,为了指示“坏”绩效,照明部分可以变为红色,为了指示“差”绩效,照明部分可以变为橙色,为了指示“平均”绩效,照明部分可以变为黄色,为了指示“好”绩效,照明部分可以变为黄绿色,或者,为了指示“优秀”绩效,照明部分可以变为绿色。然而,鉴于本发明,显而易见的是,根据各种实施例,可以使用任意数量的类别
和/或颜色。
80.排名图表或“赛马式”705可以被配置为实时指示预定数量的操作员相对于特定竞争指标的排名。例如,如图12所示,排名图表705被显示为一个表格,该表格指示对于前10名操作员和当前操作员50,操作员名称、每个操作员相对于竞争度量的表现(例如,如图所示的捡取率),以及可选地,与每个操作员的排名相关联的奖品或消息。如图12所示,由于操作员的50选择率低于员工a
‑
j,因此操作员50排在前10之外。
81.尽管被描绘为表格,但鉴于本公开内容将显而易见的是,排名图表或“赛马式”705可以配置为任何合适的图形,例如水平条形图、虚拟赛马式图形、跑步比赛图形、汽车比赛图形、列表、任何其他合适的图形或它们的组合。鉴于本公开,将进一步显而易见的是,尽管在图1中示出为与捡取率相关,如图12所示,竞争度量可以与任何合适的操作员绩效数据结果相关联,例如,捡取任务之间的最快平均时间(即在第一个机器人处完成一项捡取任务和在另一个机器人处开始另一项捡取任务之间的时间,或同一个机器人)、完成捡取任务的最快平均时间(即机器人开始和完成捡取任务之间的时间)、捡取率、连续天数出勤率、在没有扫描错误物品的情况下连续捡取单位,最大数量的机器人在一天内进行交互,或任何其他合适的度量。
82.机器人游戏化可以进一步提供奖励/奖励机制,以表彰操作员的成就。如图12所示,在排名图表705(赛马式)中排名前10位的员工a
‑
j可以根据其各自的级别获得奖励、奖励或鼓励信息(辅导)。或者,针对特定的小时、班次、日、周、月、季或年进行排名,可以为操作员50提供分配数量的奖励积分,这些积分可以稍后在工厂或公司层面兑换,例如带薪休假、礼品卡、产品、补偿奖金、401k或hsa供款等,竞争可以是多个业务单位、仓库设施或地理区域之间的竞争。在这些实施例中,奖励可包括例如公司资助的认可活动、聚会或场外郊游,更一般地,点数、奖励、奖励和辅导可以响应于任何游戏相关的结果而被提供,诸如例如实现里程碑、接收徽章、排名、或任何其他游戏相关的结果。
83.尽管本文描述为显示在机器人18的平板电脑48上,但鉴于本公开内容,游戏化数据和结果可以显示在包括显示器的任何合适装置上,这一点是显而易见的。例如,在一些实施例中,赛马式排名图表705可以显示在位于仓库内和周围的一个或更多个大型显示器上,以便操作员和员工可以跟踪排名的实时更新,而无需查询机器人18。此外,在一些实施例中,机器人18和/或平板电脑48可与手持或可穿戴装置(例如,移动电话、智能手表、增强现实眼镜、手持扫描仪、其他合适的装置或其组合)通信,该装置可用于显示或以其他方式通信(例如,通过音频消息)将游戏化数据和结果发送给操作员50。
84.非限制性示例计算装置
85.图13是根据如上面参考图1至图12描述的各种实施例的诸如可以使用的示例性计算装置810或其部分的框图。计算装置810包括用于存储用于实现示例性实施例的一个或更多个计算机可执行指令或软件的一个或更多个非暂时性计算机可读介质。非暂时性计算机可读介质可以包括但不限于一种或多种类型的硬件存储器、非暂时性有形介质(例如,一个或更多个磁盘、一个或更多个光盘、一个或更多个闪存驱动器)等。例如,包括在计算装置810中的存储器816可以存储用于执行本文公开的操作的计算机可读和计算机可执行指令或软件。例如,存储器可以存储软件应用840,其被编程为执行如关于图1
‑
12所讨论的各种所公开的操作。计算装置810还可以包括可配置和/或可编程处理器812和相关联的核心
814,以及可选的一个或更多个额外的可配置和/或可编程处理装置,例如处理器812’和相关联的核心814’(例如,在具有多个处理器/核心的计算装置的情况下),用于执行存储在存储器816中的计算机可读和计算机可执行指令或软件以及用于控制系统硬件的其他程序。处理器812和处理器812’各自可以是单核处理器或多核(814和814’)处理器。
86.可以在计算装置810中采用虚拟化,以便可以动态共享计算装置中的基础设施和资源。可以提供虚拟机824来处理在多个处理器上运行的进程,使得该进程似乎仅使用一个计算资源而不是多个计算资源。多个虚拟机也可以与一个处理器一起使用。
87.存储器816可包括计算装置存储器或随机存取存储器,例如但不限于dram、sram、edo
‑
ram等。存储器816也可以包括其他类型的存储器或其组合。
88.用户可通过虚拟显示装置801(例如计算机监视器)与计算装置810交互,该虚拟显示装置801可显示根据示例性实施例可提供的一个或更多个用户界面802。计算装置810可以包括用于接收来自用户的输入的其他i/o装置,例如键盘或任何合适的多点触摸接口818、定点装置820(例如,鼠标)。多点触摸接口818和定点装置820可以耦合到虚拟显示装置801。计算装置810可以包括其他合适的常规i/o外围装置。
89.计算装置810还可以包括一个或更多个存储装置834,例如但不限于硬盘驱动器、cd
‑
rom或其他计算机可读介质,用于存储执行本文公开的操作的数据和计算机可读指令和/或软件。示例性存储装置834还可以存储用于存储实现示例性实施例所需的任何适当信息的一个或更多个数据库。可以在任何适当的时间手动或自动更新数据库,以添加、删除和/或更新数据库中的一个或更多个物品。
90.计算装置810可以包括网络接口822,该网络接口被配置为经由一个或更多个网络装置832与一个或更多个网络(例如,局域网(lan)、广域网(wan)或互联网)通过各种连接进行接口,包括但不限于标准电话线、lan或wan链路(例如,802.11、t1、t3、56kb、x.25)、宽带连接(例如,isdn、帧中继、atm)、无线连接、控制器局域网(can)或上述任何或全部的组合。网络接口822可以包括内置网络适配器、网络接口卡、pcmcia网卡、卡总线网络适配器、无线网络适配器、usb网络适配器、调制解调器或适合于将计算装置810连接到能够通信和执行本文所述操作的任何类型的网络的任何其他装置。此外,计算装置810可以是任何计算装置,例如工作站、台式计算机、服务器、膝上型计算机、手持计算机、平板计算机、或其他形式的计算机或电信装置,能够进行通信,并具有足够的处理器功率和存储器容量来执行本文所述的操作。
91.计算装置810可以运行任何操作系统826,例如,任何版本的操作系统(微软,华盛顿州,雷德蒙德)、不同版本的unix和linux操作系统、任何版本的mac操作系统(苹果公司,加利福尼亚州,库珀蒂诺),任何版本的(苹果公司,加利福尼亚州,库珀蒂诺)操作系统、任何版本的(谷歌公司,加利福尼亚州,山景城)操作系统、任何嵌入式操作系统、任何实时操作系统、任何开源操作系统、任何专有操作系统,或能够在计算装置上运行并执行本文所述操作的任何其他操作系统。在示例性实施例中,操作系统826可以在本机模式或模拟模式下运行。在示例性实施例中,操作系统826可以在一个或更多个云计算机实例上运行。
92.图14是某些分布式实施例的示例计算装置框图。尽管图1至图12以及以上示例性
讨论的部分参考仓库管理系统15和订单服务器14,每个仓库管理系统15和订单服务器14在单独的或共同的计算装置上操作,人们将认识到,仓库管理系统15、订单服务器14和/或区域服务器可以通过网络905分布在单独的服务器系统901a
‑
d中,也可能分布在用户系统中,例如信息亭、台式计算机装置902或移动计算机装置903。例如,订单服务器14和/或区域服务器可分布在机器人18的平板电脑48之间。在一些分布式系统中,仓库管理系统软件、订单服务器软件和区域引擎中的任何一个或更多个的模块可以分别位于服务器系统901a
‑
d上,并且可以通过网络905彼此通信。
93.尽管本发明的前述描述使普通技术人员能够制作和使用目前被认为是其最佳模式的内容,但普通技术人员将理解并理解本文中具体实施例和示例的变体、组合和等价物的存在。本发明的上述实施例仅用于示例。本领域技术人员可以在不脱离本发明范围的情况下对特定实施例进行改变、修改和变化,本发明仅由所附权利要求书限定。因此,本发明不受上述实施例和示例的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。