1.本发明涉及一种玉米去雄机械,特别是涉及一种用于玉米去雄机的玉米去雄的机器人手爪。
背景技术:
2.研究表明,玉米蜡质成熟期以后,及时将玉米植株顶端的雄蕊收割,即玉米植株去雄切顶,对接下来玉米植株的抗倒伏、养分集中、收获期的提前以及玉米果穗的增产增收能产生有益效果。
3.人工去雄不仅工人劳动强度大、工作环境差、效率低成本高,而且容易延误玉米植株去雄切顶的最佳时机。为解决以上不足,现在已有一些自动、半自动去雄机械,可以在一定程度上替代人工去雄,提高工作效率,降低玉米种子生产成本。但仍存在一定不足,主要是去雄准确率低,叶片损伤大。
技术实现要素:
4.针对上述技术问题,本发明的目的是提供一种玉米去雄机器人手爪,保证去雄准确率,减少去雄作业时对玉米叶片的损伤。
5.为了实现上述目的,本发明提供了如下技术方案:
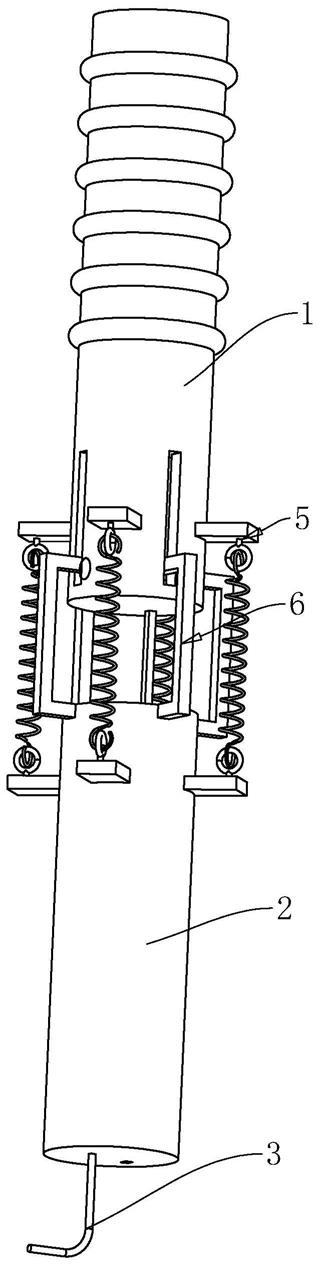
6..一种玉米去雄机器人手爪,包括宽度调节机构1、末端去雄机构2、角度调节机构3、去雄手爪4、竖直连接板6、手爪连接臂7、基板8、手爪驱动气缸9、伸缩杆连接件11、手爪驱动竖直导轨12和手爪连接件13。
7.所述基板8的后端面通过去雄机连接件14固接在去雄机上,使基板8竖直地位于玉米雄穗15的上方。
8.所述竖直连接板6固接在基板8的前端面上,且竖直连接板6与基板8平行并间隔一定距离。
9.所述手爪驱动气缸9和手爪驱动竖直导轨12由上至下依次竖直地固接在竖直连接板6的前端面上。
10.所述伸缩杆连接件11可滑动地设置在手爪驱动竖直导轨12上,并与手爪驱动气缸9的伸缩杆固接。
11.两个手爪连接臂7以手爪驱动竖直导轨12为对称轴左右对称布置,两个手爪连接臂7的上端分别与伸缩杆连接件11的左右两端铰接,两个手爪连接臂7的下端分别与一手爪连接件13铰接。
12.一对去雄手爪4以手爪驱动竖直导轨12为对称轴左右对称布置,两个去雄手爪4的上端分别固接在一手爪连接件13上。
13.所述宽度调节机构1包括宽度调节水平导轨101、宽度调节电动推杆102、手爪水平滑块103、宽度调节连杆104、竖直滑块105和宽度调节竖直导轨106。
14.所述宽度调节竖直导轨106通过导轨连接件5固接在竖直连接板6的后端面下部,
且宽度调节竖直导轨106与竖直连接板6平行并间隔一定距离;所述宽度调节竖直导轨106与手爪驱动竖直导轨12位于同一垂直于竖直连接板6的平面内。
15.所述竖直滑块105可滑动地设置在宽度调节竖直导轨106上,并与固接在竖直连接板6的后端面底端的宽度调节电动推杆102连接。
16.所述宽度调节水平导轨101垂直于宽度调节竖直导轨106设置在竖直连接板6与宽度调节竖直导轨106之间,且宽度调节竖直导轨106将宽度调节水平导轨101分隔为左右对称的两部分;所述宽度调节水平导轨101的两端分别与基板8的前端面固接;两个手爪水平滑块103分别可滑动地套设在宽度调节水平导轨101的左右两部分上。
17.两个宽度调节连杆104以宽度调节竖直导轨106为对称轴左右对称布置,两个宽度调节连杆104的上端分别与竖直滑块105的左右两端铰接,两个宽度调节连杆104的下端分别与两个手爪水平滑块103的后端面铰接。
18.两个角度调节机构3以手爪驱动竖直导轨12为对称轴,左右对称地分别布置在两个手爪水平滑块103的前端面上。
19.所述角度调节机构3包括角度调节电动推杆301、推杆连接杆302、摆杆303和手爪转动件304。
20.所述手爪转动件304固接在手爪水平滑块103的前端面上,手爪转动件304的旋转块能够绕其转轴自由转动,所述转轴垂直于手爪水平滑块103的前端面;所述推杆连接杆302的一端与角度调节电动推杆301铰接,另一端与摆杆303的一端铰接;摆杆303的另一端与手爪转动件304的旋转块铰接;所述手爪转动件304的旋转块的前端面设有用于容纳去雄手爪4的滑槽,两个去雄手爪4分别可滑动地设置在对应的手爪转动件304的旋转块的滑槽中。
21.所述末端去雄机构2包括夹持机构和切割机构;两个对称布置的夹持机构分别固接在两个去雄手爪4的下端,用于夹持玉米雄穗15;所述切割机构设置在其中一个夹持机构上,用于切断被夹持住的玉米雄穗15。
22.所述夹持机构包括夹持架201和夹持杆202,所述夹持架201固接在去雄手爪4的下端,所述夹持架201包括间隔一定距离的前连接板203和后连接板204;水平且分别垂直于基板8和去雄手爪4的夹持杆202的前后两端分别与前连接板203和后连接板204的下部固接。
23.所述夹持杆202的外表面包覆有橡胶。
24.所述切割机构包括刀夹连接架205、弧形连杆206、刀夹207、刀片208、摇杆209、支撑杆210、传动连杆211和切割气缸212。
25.所述切割气缸212平行于去雄手爪4固接在夹持架201上;所述传动连杆211的上端与切割气缸212的伸缩杆铰接,传动连杆211的另一端与平行于夹持杆202的支撑杆210的中部铰接,所述支撑杆210的前后两端分别与一弧形连杆206的上端铰接,两个弧形连杆206的中部分别铰接在前连接板203和后连接板204上,两个弧形连杆206的下端分别与一刀夹连接架205的首端铰接,两个刀夹连接架205的末端分别与一摇杆209的下端铰接,两个摇杆209的上端分别铰接在前连接板203和后连接板204上;平行于夹持杆202的刀夹207的前后两端分别固接在两个刀夹连接架205的末端上,且刀夹207位于夹持杆202的下方;所述刀片208固接在刀夹207内。
26.所述基板8的底端位于玉米雄穗15上方100毫米处。
27.所述竖直连接板6与基板8之间的间隔距离为100毫米。
28.所述手爪驱动气缸9通过两个气缸连接架10固接在竖直连接板6上。
29.所述宽度调节竖直导轨106与竖直连接板6之间的间隔距离为35毫米。
30.所述宽度调节竖直导轨106通过导轨连接件5与竖直连接板6固接。
31.所述宽度调节水平导轨101通过导轨连接件5与基板8固接。
32.与现有技术相比,本发明的有益效果在于:
33.本发明利用电动推杆之间的相互配合来调节末端去雄机构的运动轨迹,使末端去雄机构从上往下作业时,其轨迹完整包络雄穗,减少对玉米叶片的损伤。
34.本发明利用气缸与电动推杆的配合,快速准确将末端去雄机构运动至雄穗切割点,提高了去雄装置的工作效率。并通过末端去雄机构的夹持杆夹紧雄穗根茎,辅助末端去雄机构的刀片切割,保证去雄准确率。
35.本发明结构紧凑、可靠性高,能够在去除玉米雄穗过程中减少对玉米及其叶片的破坏;且制造成本低,自动化程度高,能有效降低人工劳动强度,去雄效率高、能处理不同尺寸的雄穗,适用性广。
附图说明
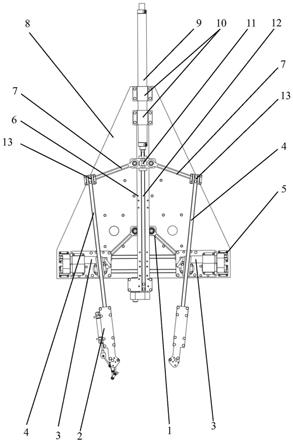
36.图1为本发明的玉米去雄机器人手爪的结构示意图;
37.图2为本发明的基板8后端面的结构示意图;
38.图3为本发明的角度调节机构3的结构示意图;
39.图4为本发明的宽度调节机构1的结构示意图;
40.图5为本发明的末端去雄机构2的结构示意图;
41.图6为本发明的玉米去雄机器人手爪夹持玉米雄穗示意图;
42.图7为本发明的玉米去雄机器人手爪切玉米断雄穗示意图。
43.其中的附图标记为:
44.1宽度调节机构
45.101宽度调节水平导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102宽度调节电动推杆
46.103手爪水平滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104宽度调节连杆
47.105竖直滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
106宽度调节竖直导轨
48.2末端去雄机构
49.201夹持架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202夹持杆
50.203前连接板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
204后连接板
51.205刀夹连接架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
206弧形连杆
52.207刀夹
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
208刀片
53.209摇杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210支撑杆
54.211传动连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212切割气缸
55.3角度调节机构
56.301角度调节电动推杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302推杆连接杆
57.303摆杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
304手爪转动件
58.4去雄手爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5导轨连接件
59.6竖直连接板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7手爪连接臂
60.8基板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9手爪驱动气缸
61.10气缸连接架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11伸缩杆连接件
62.12手爪驱动竖直导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13手爪连接件
63.14去雄机连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15玉米雄穗
具体实施方式
64.下面结合附图和实施例对本发明进行进一步说明。
65.如图1~图3所示,本发明的一种玉米去雄机器人手爪,包括宽度调节机构1、末端去雄机构2、角度调节机构3、去雄手爪4、竖直连接板6、手爪连接臂7、基板8、手爪驱动气缸9、伸缩杆连接件11、手爪驱动竖直导轨12、手爪连接件13和去雄机连接件14。
66.如图2所示,所述基板8的后端面通过去雄机连接件14固接在去雄机上,使基板8竖直地位于玉米雄穗15的上方。优选地,所述基板8的底端位于玉米雄穗15上方100毫米处。
67.所述竖直连接板6固接在基板8的前端面上,且竖直连接板6与基板8平行并间隔一定距离。优选地,所述竖直连接板6与基板8之间的间隔距离为100毫米。
68.所述手爪驱动气缸9和手爪驱动竖直导轨12由上至下依次竖直地固接在竖直连接板6的前端面上。其中,所述手爪驱动气缸9通过两个气缸连接架10固接在竖直连接板6上。
69.所述伸缩杆连接件11可滑动地设置在手爪驱动竖直导轨12上,并与手爪驱动气缸9的伸缩杆固接。
70.两个手爪连接臂7以手爪驱动竖直导轨12为对称轴左右对称布置,两个手爪连接臂7的上端分别与伸缩杆连接件11的左右两端铰接,两个手爪连接臂7的下端分别与一手爪连接件13铰接。
71.一对去雄手爪4以手爪驱动竖直导轨12为对称轴左右对称布置,两个去雄手爪4的上端分别固接在一手爪连接件13上。
72.如图4所示,所述宽度调节机构1包括宽度调节水平导轨101、宽度调节电动推杆102、手爪水平滑块103、宽度调节连杆104、竖直滑块105和宽度调节竖直导轨106。
73.所述宽度调节竖直导轨106固接在竖直连接板6的后端面下部,且宽度调节竖直导轨106与竖直连接板6平行并间隔一定距离。优选地,所述宽度调节竖直导轨106与竖直连接板6之间的间隔距离为35毫米。所述宽度调节竖直导轨106与手爪驱动竖直导轨12位于同一垂直于竖直连接板6的平面内。
74.所述竖直滑块105可滑动地设置在宽度调节竖直导轨106上,并与固接在竖直连接板6的后端面底端的宽度调节电动推杆102连接。
75.所述宽度调节水平导轨101垂直于宽度调节竖直导轨106设置在竖直连接板6与宽度调节竖直导轨106之间,且宽度调节竖直导轨106将宽度调节水平导轨101分隔为左右对称的两部分;所述宽度调节水平导轨101的两端通过导轨连接件5分别与基板8的前端面固接。两个手爪水平滑块103分别可滑动地套设在宽度调节水平导轨101的左右两部分上。
76.两个宽度调节连杆104以宽度调节竖直导轨106为对称轴左右对称布置,两个宽度调节连杆104的上端分别与竖直滑块105的左右两端铰接,两个宽度调节连杆104的下端分别与两个手爪水平滑块103的后端面铰接。
77.两个角度调节机构3以手爪驱动竖直导轨12为对称轴,左右对称地分别布置在两个手爪水平滑块103的前端面上,用于调节去雄手爪4的倾斜角度。
78.如图3所示,所述角度调节机构3包括角度调节电动推杆301、推杆连接杆302、摆杆303和手爪转动件304。
79.所述手爪转动件304固接在手爪水平滑块103的前端面上,手爪转动件304的旋转块能够绕其转轴自由转动,所述转轴垂直于手爪水平滑块103的前端面。所述推杆连接杆302的一端与角度调节电动推杆301铰接,另一端与摆杆303的一端铰接,摆杆303的另一端与手爪转动件304的旋转块铰接。所述手爪转动件304的旋转块的前端面设有用于容纳去雄手爪4的滑槽,两个去雄手爪4分别可滑动地设置在对应的手爪转动件304的旋转块的滑槽中。
80.如图5所示,所述末端去雄机构2包括夹持机构和切割机构;两个对称布置的夹持机构分别固接在两个去雄手爪4的下端,用于夹持玉米雄穗15;所述切割机构设置在其中一个夹持机构上,用于切断被夹持住的玉米雄穗15。其中,
81.所述夹持机构包括夹持架201和夹持杆202,所述夹持架201固接在去雄手爪4的下端,所述夹持架201包括间隔一定距离的前连接板203和后连接板204;水平且分别垂直于基板8和去雄手爪4的夹持杆202的前后两端分别与前连接板203和后连接板204的下部固接。
82.优选地,所述夹持杆202的外表面包覆有橡胶。
83.所述切割机构包括刀夹连接架205、弧形连杆206、刀夹207、刀片208、摇杆209、支撑杆210、传动连杆211和切割气缸212。
84.所述切割气缸212平行于去雄手爪4固接在夹持架201上。所述传动连杆211的上端与切割气缸212的伸缩杆铰接,传动连杆211的另一端与平行于夹持杆202的支撑杆210的中部铰接,所述支撑杆210的前后两端分别与一弧形连杆206的上端铰接,两个弧形连杆206的中部分别铰接在前连接板203和后连接板204上,两个弧形连杆206的下端分别与一刀夹连接架205的首端铰接,两个刀夹连接架205的末端分别与一摇杆209的下端铰接,两个摇杆209的上端分别铰接在前连接板203和后连接板204上;平行于夹持杆202的刀夹207的前后两端分别固接在两个刀夹连接架205的末端上,且刀夹207位于夹持杆202的下方;所述刀片208固接在刀夹207内。
85.本发明的工作过程如下:
86.将本发明的玉米去雄机器人手爪置于带有雄穗的玉米植株正上方,宽度调节机构1和角度调节机构3同时工作,宽度调节电动推杆102和角度调节电动推杆301进行伸缩,宽度调节电动推杆102带动竖直滑块105沿着宽度调节竖直导轨106上下移动,通过两端分别与竖直滑块105和手爪水平滑块103铰接的宽度调节连杆104,将动力传递至手爪水平滑块103,使手爪水平滑块103沿着宽度调节水平导轨101表面进行滑动,从而完成末端去雄机构2初始位置的宽度调节。同时,角度调节电动推杆301进行伸缩运动带动手爪转动件304的旋转块绕其转轴旋转,从而调整去雄手爪4的倾斜角度。当宽度调节和角度调节都调整到最佳位置时,末端去雄机构2的运动轨迹能够包络玉米雄穗15的最大外表面。
87.然后,手爪驱动气缸9开始工作,伸缩杆连接件11在手爪驱动气缸9的推动下沿着手爪驱动竖直导轨12向下运动,去雄手爪4沿着固定的角度向下运动,使固连在去雄手爪4末端的末端去雄机构2移动至雄穗最佳切割点。
88.末端去雄机构2在去雄手爪4的带动下,首先会通过夹持杆202与玉米雄穗15的碰撞,夹持玉米雄穗15,如图6所示。然后切割气缸212工作,与切割气缸212伸缩末端铰接的传动连杆211在切割气缸212的伸缩带动下,将动力传递至与传动连杆211下端铰接的支撑杆210上,与支撑杆210铰接的弧形连杆206将动力传递至刀夹连接架205上,支撑杆210在传动连杆211的带动下沿弧线轨迹向下运动,在弧形连杆206与刀夹连接架205的作用下,使刀夹207沿着水平运动,从而带动刀片208水平运动,从而切断雄穗,完成去雄工作,如图7所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。