1.本发明涉及一种机械手领域,更具体的说是一种智能机械手夹紧切割设备。
背景技术:
2.泡沫板的尺寸总会有不同的需求,泡沫板出场规格统一,此时会有切割的需求,传统设备自动化程度过低,本发明解决了上述问题。
技术实现要素:
3.本发明的目的是提供一种智能机械手夹紧切割设备,可以自动化的完成上料、送料、切割、分类工作。
4.本发明的目的通过以下技术方案来实现:
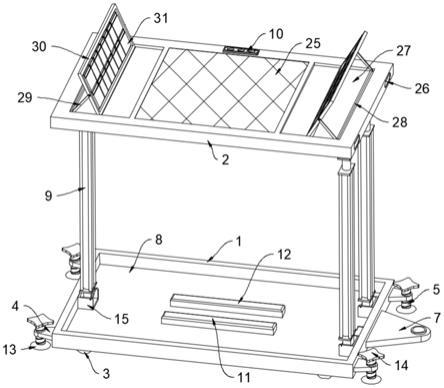
5.一种智能机械手夹紧切割设备,下料组合体、机械手送料组合体、运输切割组合体和分离组合体,其特征在于:所述下料组合体与机械手送料组合体相连接,机械手送料组合体与运输切割组合体相连接,运输切割组合体与分离组合体相连接。
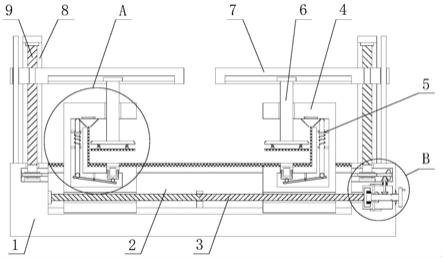
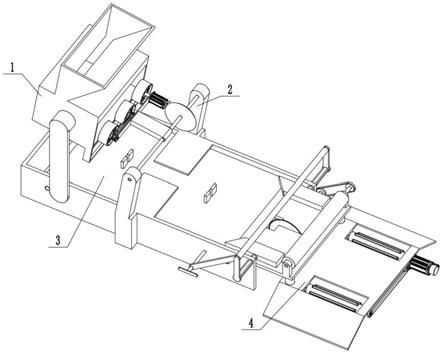
6.作为本技术方案的进一步优化,本发明所述下料组合体包括下料斗、储存室、储存室支架、斜面挡板、滑板、弹簧柱、弹簧和弹簧连接板,下料斗与储存室相连接,储存室与储存室支架相连接,斜面挡板与滑板相连接,滑板与弹簧柱滑动连接,弹簧柱与弹簧连接板相连接,弹簧连接板与储存室相连接,弹簧套接在弹簧柱上,弹簧两端分别与滑板、弹簧连接板相接触,弹簧处于压缩状态。
7.作为本技术方案的进一步优化,本发明所述机械手送料组合体包括运输箱、送料支架、固定杆、固定锥齿轮、摆动支架ⅰ、摆动支架ⅱ、双头伺服电机、电机轴、滚动锥齿轮、扇叶轴、带轮ⅰ、皮带ⅰ、扇叶罩、带孔挡板、扇叶和置板架,储存室支架与运输箱相连接,运输箱与送料支架相连接,送料支架与固定杆相连接,固定杆与固定锥齿轮相连接,固定杆与摆动支架ⅰ小间隙配合,摆动支架ⅰ与摆动支架ⅱ相连接,摆动支架ⅱ与双头伺服电机相连接,双头伺服电机两端分别与电机轴、扇叶轴相连接,电机轴与滚动锥齿轮相连接,滚动锥齿轮与固定锥齿轮啮合连接,每个扇叶轴均与带轮ⅰ相连接,扇叶轴与摆动支架ⅱ转动连接,两个相邻带轮ⅰ通过皮带ⅰ相连接,扇叶轴与带孔挡板转动连接,每个扇叶罩分别与两个带孔挡板相连接,扇叶位于两个带孔挡板之间,扇叶轴与扇叶相连接,扇叶罩与摆动支架ⅱ相连接,置板架与运输箱相连接。
8.作为本技术方案的进一步优化,本发明所述运输切割组合体包括运输辊轴、运输辊、运输带、推板、切割板、导向板、滑杆、滑杆支耳、连接杆、螺纹杆、螺纹轴、锯片轴、带轮ⅱ、皮带ⅱ、输出轴、输出轴支耳、输出辊、锯片轴支耳和锯片,运输辊轴与运输箱相连接,运输辊轴与运输辊相连接,两个运输辊通过运输带相连接,运输带与推板相连接,切割板与运输箱相连接,导向板与滑杆相连接,滑杆与运输箱滑动连接,滑杆与滑杆支耳相连接两个滑杆支耳通过连接杆相连接,连接杆与螺纹杆相连接,螺纹杆与螺纹轴螺纹连接,螺纹轴与运输箱转动连接,锯片轴与带轮ⅱ相连接,两个带轮ⅱ通过皮带ⅱ相连接,带轮ⅱ与输出轴相
连接,输出轴与输出轴支耳转动连接,输出轴支耳与切割板相连接,输出轴与输出辊相连接,锯片轴与锯片轴支耳转动连接,锯片轴支耳与切割板相连接,锯片轴与锯片相连接,运输辊轴、锯片轴均与动力相连接。
9.作为本技术方案的进一步优化,本发明所述分离组合体包括支柱、分离板、斜板、伺服电机、转辊轴、转辊轴支耳、齿轮ⅰ、齿轮ⅱ、齿轮ⅱ轴、齿轮ⅱ轴支耳、带轮ⅲ、皮带ⅲ、转辊、拉簧和滑动拨块,支柱与切割板相连接,支柱与分离板相连接,分离板与斜板相连接,伺服电机与分离板相连接,伺服电机与转辊轴相连接,转辊轴与转辊轴支耳转动连接,转辊轴支耳与分离板相连接,转辊轴与齿轮ⅰ相连接,齿轮ⅰ与齿轮ⅱ啮合连接,齿轮ⅱ与齿轮ⅱ轴相连接,齿轮ⅱ轴与齿轮ⅱ轴支耳转动连接,齿轮ⅱ轴支耳与分离板相连接,齿轮ⅱ轴与带轮ⅲ相连接,两个带轮ⅲ通过皮带ⅲ相连接,一个带轮ⅲ与转辊轴相连接,转辊轴与转辊相连接,转辊与拉簧相连接,拉簧处于常态,拉簧与滑动拨块相连接,滑动拨块与转辊滑动连接,分离板上设有质量传感器。
10.本发明一种智能机械手夹紧切割设备的有益效果为:将泡沫板置于下料组合体上,泡沫板自动填满储存室,机械手送料组合体将储存室内的泡沫板逐一取出,运输切割组合体将取出的泡沫板运至切割处完成切割,可预先设置切割位置,调整好后后续切割成品均为同一尺寸,分离组合体可以将切割完毕的泡沫板按同一尺寸分类。
附图说明
11.下面结合附图和具体实施方法对本发明做进一步详细的说明。
12.图1是本发明的整体结构示意图;
13.图2是本发明下料组合体1的结构示意一;
14.图3是本发明下料组合体1的结构剖视图;
15.图4是本发明下料组合体1的结构放大示意图;
16.图5是本发明下料组合体1的结构示意图二;
17.图6是本发明机械手送料组合体2的结构示意图一;
18.图7是本发明机械手送料组合体2的结构示意图二;
19.图8是本发明机械手送料组合体2的结构示意图三;
20.图9是本发明运输切割组合体3的结构示意图一;
21.图10是本发明运输切割组合体3的结构示意图二;
22.图11是本发明运输切割组合体3的结构示意图三;
23.图12是本发明运输切割组合体3的结构示意图四;
24.图13是本发明分离组合体4的结构示意图一;
25.图14是本发明分离组合体4的结构示意图二;
26.图15是本发明分离组合体4的结构剖视图。
27.图中:下料组合体1;下料斗1
‑
1;储存室1
‑
2;储存室支架1
‑
3;斜面挡板1
‑
4;滑板1
‑
5;弹簧柱1
‑
6;弹簧1
‑
7;弹簧连接板1
‑
8;机械手送料组合体2;运输箱2
‑
1;送料支架2
‑
2;固定杆2
‑
3;固定锥齿轮2
‑
4;摆动支架ⅰ2
‑
5;摆动支架ⅱ2
‑
6;双头伺服电机2
‑
7;电机轴2
‑
8;滚动锥齿轮2
‑
9;扇叶轴2
‑
10;带轮ⅰ2
‑
11;皮带ⅰ2
‑
12;扇叶罩2
‑
13;带孔挡板2
‑
14;扇叶2
‑
15;置板架2
‑
16;运输切割组合体3;运输辊轴3
‑
1;运输辊3
‑
2;运输带3
‑
3;推板3
‑
4;切割板3
‑
5;
导向板3
‑
6;滑杆3
‑
7;滑杆支耳3
‑
8;连接杆3
‑
9;螺纹杆3
‑
10;螺纹轴3
‑
11;锯片轴3
‑
12;带轮ⅱ3
‑
13;皮带ⅱ3
‑
14;输出轴3
‑
15;输出轴支耳3
‑
16;输出辊3
‑
17;锯片轴支耳3
‑
18;锯片3
‑
19;分离组合体4;支柱4
‑
1;分离板4
‑
2;斜板4
‑
3;伺服电机4
‑
4;转辊轴4
‑
5;转辊轴支耳4
‑
6;齿轮ⅰ4
‑
7;齿轮ⅱ4
‑
8;齿轮ⅱ轴4
‑
9;齿轮ⅱ轴支耳4
‑
10;带轮ⅲ4
‑
11;皮带ⅲ4
‑
12;转辊4
‑
13;拉簧4
‑
14;滑动拨块4
‑
15。
具体实施方式
28.下面结合附图对本发明作进一步详细说明。
29.本装置中所述的固定连接是指通过焊接、螺纹固定等方式进行固定,结合不同的使用环境,使用不同的固定方式;所述的转动连接是指通过将轴承烘装在轴上,轴或轴孔上设置有弹簧挡圈槽,通过将弹性挡圈卡在挡圈槽内实现轴承的轴向固定,实现转动;所述的滑动连接是指通过滑块在滑槽或导轨内的滑动进行连接,滑槽或导轨一般为阶梯状,防止滑块在滑槽或导轨内发生脱落;所述的铰接是指通过在铰链、销轴和短轴等连接零件上进行活动的连接方式;所需密封处均是通过密封圈或o形圈实现密封。
30.具体实施方式一:
31.下面结合图1
‑
15说明本实施方式,一种智能机械手夹紧切割设备,将泡沫板置于下料组合体上,泡沫板自动填满下料组合体,机械手送料组合体将储存室内的泡沫板逐一取出,运输切割组合体将取出的泡沫板运至切割处完成切割,可预先设置切割位置,调整好后后续切割成品均为同一尺寸,分离组合体可以将切割完毕的泡沫板按同一尺寸分类。
32.具体实施方式二:
33.下面结合图1
‑
15说明本实施方式,本实施方式对实施方式一作进一步说明,将泡沫板置于下料斗1
‑
1内,泡沫板沿下料斗1
‑
1滑入储存室1
‑
2内,储存室1
‑
2倾斜设置,泡沫板滑至储存室1
‑
2出口处被斜面挡板1
‑
4阻挡无法排出,当泡沫板无法继续下滑,储存室1
‑
2留有部分剩余空间。
34.具体实施方式三:
35.下面结合图1
‑
15说明本实施方式,本实施方式对实施方式一作进一步说明,开启双头伺服电机2
‑
7,双头伺服电机2
‑
7带动电机轴2
‑
8、扇叶轴2
‑
10转动,电机轴2
‑
8带动滚动锥齿轮2
‑
9沿固定锥齿轮2
‑
4边缘做啮合圆周运动,双头伺服电机2
‑
7做圆周运动,双头伺服电机2
‑
7通过摆动支架ⅱ2
‑
6带动摆动支架ⅰ2
‑
5圆周运动,设置双头伺服电机2
‑
7的的程序为,正转一定圈数后反转相同圈数,转动圈数对应滚动锥齿轮2
‑
9的位置分别为垂直下方、垂直储存室1
‑
2,角度范围为120
°
,摆动支架ⅰ2
‑
5绕固定杆2
‑
3转动,摆动支架ⅱ2
‑
6带动扇叶罩2
‑
13、带孔挡板2
‑
14、扇叶2
‑
15转动,摆动支架ⅱ2
‑
6与扇叶罩2
‑
13通过支杆焊接在两零件之间固定连接,附图中省略未画,扇叶轴2
‑
10带动扇叶2
‑
15转动,扇叶2
‑
15正转反转分别鼓风与吸风,当摆动支架ⅰ2
‑
5做图中方向逆时针旋转时,扇叶2
‑
15吸风将储存室1
‑
2出口处的泡沫板吸出,斜面挡板1
‑
4向下滑动,滑板1
‑
5带动弹簧1
‑
7压缩,泡沫板吸出后斜面挡板1
‑
4复位之后的泡沫板无法排出,当摆动支架ⅰ2
‑
5做图中方向顺时针旋转时,扇叶2
‑
15位于置板架2
‑
16正上方,扇叶2
‑
15鼓风将泡沫板吹至置板架2
‑
16后返回开启后续往复循环。
36.具体实施方式四:
37.下面结合图1
‑
15说明本实施方式,本实施方式对实施方式一作进一步说明,运输
辊轴3
‑
1、锯片轴3
‑
12均与动力相连接,运输辊轴3
‑
1带动运输辊3
‑
2转动,两个运输辊3
‑
2带动运输带3
‑
3运动,运输带3
‑
3带动推板3
‑
4运动将置板架2
‑
16上的泡沫板推下至运输带3
‑
3上,转动螺纹轴3
‑
11,螺纹轴3
‑
11通过螺纹带动螺纹杆3
‑
10前后运动,螺纹杆3
‑
10带动滑杆支耳3
‑
8运动,滑杆支耳3
‑
8带动两个滑杆3
‑
7运动,滑杆3
‑
7带动两个导向板3
‑
6同向运动,两个导向板3
‑
6间间距不变、位置改变,两个导向板3
‑
6间的间距与泡沫板的宽度相同,泡沫板与导向板3
‑
6斜面接触滑动至两个导向板3
‑
6之间,通过调整两个导向板3
‑
6的位置来控制泡沫板的位置,泡沫板与锯片3
‑
19相接触,锯片轴3
‑
12带动锯片3
‑
19转动,锯片3
‑
19将推板3
‑
4推进的泡沫板切割,通过控制泡沫板的位置来调整切割的尺寸,锯片轴3
‑
12带动带轮ⅱ3
‑
13转动,两个带轮ⅱ3
‑
13通过皮带ⅱ3
‑
14带动输出轴3
‑
15转动,输出轴3
‑
15带动输出辊3
‑
17转动,输出辊3
‑
17将切割完毕的泡沫板输出,完成切割。
38.具体实施方式五:
39.下面结合图1
‑
15说明本实施方式,本实施方式对实施方式一作进一步说明,切割完毕的泡沫板落至分离板4
‑
2上,分离板4
‑
2上设有质量传感器,当传感器感应到泡沫板完全落下后控制伺服电机4
‑
4自动,伺服电机4
‑
4带动转辊轴4
‑
5转动,转辊轴4
‑
5带动齿轮ⅰ4
‑
7转动,齿轮ⅰ4
‑
7带动齿轮ⅱ4
‑
8相对反向转动,齿轮ⅱ4
‑
8带动齿轮ⅱ轴4
‑
9转动,齿轮ⅱ轴4
‑
9带动带轮ⅲ4
‑
11转动,两个带轮ⅲ4
‑
11通过皮带ⅲ4
‑
12带动另一转辊轴4
‑
5转动,两个转辊轴4
‑
5相对反向转动,转辊轴4
‑
5带动转辊4
‑
13转动,在离心作用下,滑动拨块4
‑
15被甩出,两个滑动拨块4
‑
15与两个切割后的泡沫板分别接触,两块泡沫板分别沿斜板4
‑
3滑下,完成分离。
40.当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。