1.本实用新型属于清洗机器人领域,具体涉及一种行走结构。
背景技术:
2.目前玻璃幕墙清洗的清洗方式主要为人工清洗,玻璃幕墙的范围一般较大,人工清洗劳动强度大,效率低下,并且危险系数高。随着幕墙清洗的需求越来越大,为解决人工清洗问题,国内外也涌现出了许多类型的幕墙清洗机器人。
3.现有的一种高楼幕墙清洗机器人主要包括行走装置及清洗装置,清洗装置通过行走装置带动行走,但其行走装置的越障能力差,难以适应跨越数量较多、高度不一的障碍物,不能正常越障且越障时容易行走不平稳,影响清洗装置的正常清洗,降低清洗机器人的清洗效率。
技术实现要素:
4.本实用新型的目的在于提供一种行走结构,该行走结构能提高行走装置的越障能力,使得行走装置能顺利越障,利于提高清洗机器人的清洗效率。
5.其技术方案如下:
6.行走结构,包括支撑主架、传动机构、双驱动机构、触发机构及撑脚组件,所述传动机构设于所述支撑主架上,所述双驱动机构与所述传动机构连接,所述撑脚组件由所述双驱动机构带动升降,所述触发机构设于所述双驱动机构上并与所述双驱动机构连接,所述支撑主架上设有触发挡板。
7.在其中一个实施例中,所述触发机构包括第一安装板、导通组件、连接臂及触发压板,所述第一安装板安装于所述双驱动机构上,所述导通组件固定于所述第一安装板上,所述导通组件用于控制所述双驱动机构运动,所述导通组件上设有第一作用开关及第二作用开关,所述触发压板固定于所述连接臂上,所述连接臂与所述第一安装板转动连接。
8.在其中一个实施例中,所述双驱动机构包括第二安装板、第一驱动机构及第二驱动机构,所述第一驱动机构及所述第一安装板均安装于所述第二安装板上,所述第一驱动机构与第二驱动机构连接并带动第二驱动机构升降,所述撑脚组件与所述第二驱动机构连接。
9.在其中一个实施例中,所述撑脚组件包括支撑主体、连接组件、缓冲弹簧及吸盘组件,所述连接组件的一端与所述第二驱动机构固定连接,另一端与所述支撑主体滑动配合,所述吸盘组件与所述支撑主体连接,所述缓冲弹簧套设于所述支撑主体上,且所述缓冲弹簧位于所述连接组件与所述吸盘组件之间。
10.在其中一个实施例中,所述连接组件包括滑动套、驱动连接板、第一螺母及第二螺母,所述滑动套内部中空,且所述滑动套套设于所述支撑主体上,所述支撑主体远离所述吸盘组件的一端固定有限位凸台,所述滑动套位于所述限位凸台与所述缓冲弹簧之间,所述驱动连接板的其中一端与所述第二驱动机构固定连接,另一端与所述滑动套固定连接,所
述第一螺母与所述第二螺母均与所述滑动套的外壁螺纹连接,所述驱动连接板夹持于所述第一螺母与所述第二螺母之间。
11.在其中一个实施例中,所述触发机构还包括微动开关,所述微动开关设于所述导通组件的顶部,所述微动开关、所述第一作用开关与所述第二作用开关依次上下对应,所述触发压板纵向延伸设置,且所述触发压板纵向延伸的高度大于或等于所述第二作用开关与所述微动开关的开关部之间的高度。
12.在其中一个实施例中,所述导通组件靠近所述第二作用开关的侧壁上设有限位板,所述限位板与所述导通组件的侧壁固定连接,所述限位板上设有与所述第二作用开关适配的通孔,所述第二作用开关从所述通孔中伸出。
13.在其中一个实施例中,所述第一安装板上固定有连接块,所述连接臂与所述连接块转动连接,所述连接臂远离与所述连接块连接的一端设有滚轮,所述滚轮与所述连接臂之间转动连接。
14.在其中一个实施例中,所述传动机构包括电机、传动轴及传动链条,所述电机固定于所述支撑主架上,所述传动轴与所述支撑主架之间转动连接,所述传动轴由所述电机带动旋转,所述传动轴与所述传动链条连接并带动所述传动链条回转,所述双驱动机构与所述传动链条连接。
15.在其中一个实施例中,所述传动链条上设有第一连接片,所述双驱动机构上设有第二连接片,所述第一连接片与所述第二连接片连接。
16.本实用新型所提供的行走结构,通过设置双驱动机构,提高行走装置的越障能力,使得行走装置能适应数量较多、高度不一的障碍;设置传动机构与双驱动机构连接,以实现行走装置在工作面水平方向上的移动;设置触发机构及触发挡板,以切换双驱动机构的工作状态,控制撑脚组件的升降,进而实现切换行走装置的行走工作状态,从而实现行走装置的正常行走。
附图说明
17.此处的附图,示出了本实用新型所述技术方案的具体实例,并与具体实施方式构成说明书的一部分,用于解释本实用新型的技术方案、原理及效果。
18.除非特别说明或另有定义,不同附图中,相同的附图标记代表相同或相似的技术特征,对于相同或相似的技术特征,也可能会采用不同的附图标记进行表示。
19.图1是本实用新型实施例行走结构的结构示意图。
20.图2是本实用新型实施例行走结构中触发机构的结构示意图。
21.图3是本实用新型实施例行走结构中行走脚机构的结构示意图。
22.图4是图1中a的放大示意图。
23.附图标记说明:
24.10、支撑主架;11、触发挡板;20、传动轴;21、传动链条;22、第一连接片;23、第二连接片;30、第一安装板;31、导通组件;32、连接臂;33、触发压板;34、第一作用开关;35、第二作用开关;36、微动开关;37、限位板;38、连接块;39、滚轮;40、第二安装板;41、第一驱动机构;42、第二驱动机构;50、支撑主体;501、限位凸台;51、缓冲弹簧;52、吸盘组件;53、滑动套;54、驱动连接板;55、第一螺母;56、第二螺母;60、真空发生器。
具体实施方式
25.为了便于理解本实用新型,下面将参照说明书附图对本实用新型的具体实施例进行更详细的描述。
26.除非特别说明或另有定义,本文所使用的所有技术和科学术语与所属技术领域的技术人员通常理解的含义相同。在结合本实用新型的技术方案以现实的场景的情况下,本文所使用的所有技术和科学术语也可以具有与实现本实用新型的技术方案的目的相对应的含义。
27.除非特别说明或另有定义,本文所使用的“第一、第二
…”
仅仅是用于对名称的区分,不代表具体的数量或顺序。
28.除非特别说明或另有定义,本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
29.需要说明的是,当元件被认为“固定于”另一个元件,它可以是直接固定在另一个元件上,也可以是存在居中的元件;当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件,也可以是同时存在居中元件;当一个元件被认为是“安装在”另一个元件,它可以是直接安装在另一个元件,也可以是同时存在居中元件。当一个元件被认为是“设在”另一个元件,它可以是直接设在另一个元件,也可以是同时存在居中元件。
30.除非特别说明或另有定义,本文所使用的“所述”、“该”为相应位置之前所提及或描述的技术特征或技术内容,该技术特征或技术内容与其所提及的技术特征或技术内容可以是相同的,也可以是相似的。
31.毫无疑义,与本实用新型的目的相违背,或者明显矛盾的技术内容或技术特征,应被排除在外。
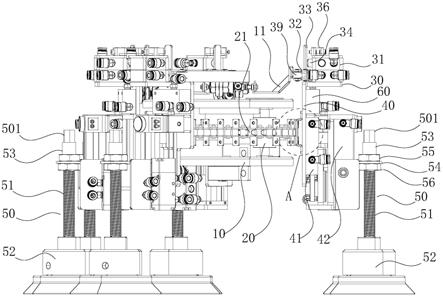
32.如图1至图4所示,行走结构,包括支撑主架10、传动机构、双驱动机构、触发机构及撑脚组件,所述传动机构设于所述支撑主架10上,所述双驱动机构与所述传动机构连接,在本实施例中,双驱动机构与撑脚组件连接形成行走脚机构,所述撑脚组件由所述双驱动机构带动升降,该行走脚机构设有多个,且多个行走脚机构均由传动机构带动移动,所述触发机构设于所述双驱动机构上并与所述双驱动机构连接,所述支撑主架的顶部10固定有触发挡板11,触发挡板11位于行走脚机构需要变换工作状态的位置上。
33.通过设置双驱动机构,提高行走装置的升降行程,进而提高行走装置的越障能力,使得行走装置能适应数量多、高度不一的障碍物;设置传动机构与双驱动机构连接,从而带动行走脚机构的回转,配合双驱动机构工作,以实现行走装置在工作面的水平方向上的移动;设置触发机构及触发挡板11,当行走脚机构被传动机构传送到与触发挡板11接触的位置,触发机构被触发工作,切换双驱动机构的工作状态,控制撑脚组件的升降,进而实现切换行走装置的行走工作状态,从而实现行走装置的正常行走;该行走结构能提高行走装置的越障能力,使得行走装置能顺利越障,并且能保证行走装置行走状态的正常切换以及行走平稳,从而利于行走装置与清洗装置配合工作,提高清洗机器人的清洗效率。
34.如图1至图3所示,所述触发机构包括第一安装板30、导通组件31、连接臂32及触发压板33,所述第一安装板30安装于所述双驱动机构上,所述导通组件31固定于所述第一安装板30上,所述导通组件31用于控制所述双驱动机构运动,所述导通组件31上设有第一作用开关34及第二作用开关35,所述触发压板33固定于所述连接臂32上,所述连接臂32与所
述第一安装板30转动连接。在本实施例中,导通组件31为两个机械串联设置的二位三通阀,通过两个二位三通阀控制双驱动机构的工作。在传动机构带动行走脚机构移动过程中,当触发机构移动至双驱动机构需要切换工作状态的位置时,触发机构上的连接臂32会与触发挡板11接触,行走脚机构继续随传动机构移动,触发挡板11将连接臂32朝靠近作用开关的一侧压入,从而使得连接臂32带动触发压板33朝靠近作用开关的一侧转动,触发压板33能同时触发第一作用开关34及第二作用开关35,进而能触发导通组件31工作,保证双驱动机构正常工作,实现切换双驱动机构的工作状态,以驱动撑脚组件的升降,使得行走装置能正常变换行走状态,避免行走装置行走不平稳。
35.如图1及图3所示,所述双驱动机构包括第二安装板40、第一驱动机构41及第二驱动机构42,所述第一驱动机构41及所述第一安装板30均安装于所述第二安装板40上,所述第一驱动机构41与第二驱动机构42连接并带动第二驱动机构42升降,所述撑脚组件与所述第二驱动机构42连接。通过以上设置,实现双驱动机构以及触发机构的连接安装,第一驱动机构41带动第二驱动机构42的升降,第二驱动机构42带动撑脚组件的升降,从而实现延长行走脚机构的行程,提高行走装置的越障能力,使得行走装置不容易被较高的障碍物阻挡而无法正常移动。
36.如图1及图3所示,所述撑脚组件包括支撑主体50、连接组件、缓冲弹簧51及吸盘组件52,所述连接组件的一端与所述第二驱动机构42固定连接,另一端与所述支撑主体50滑动配合,所述吸盘组件52与所述支撑主体50连接,所述缓冲弹簧51套设于所述支撑主体50上,且所述缓冲弹簧51位于所述连接组件与所述吸盘组件52之间。当驱动机构驱动支撑主体50下降至吸盘组件52与工作面接触时,此时,由于惯性作用,连接组件具有下压的趋势,缓冲弹簧51被压缩并缓减连接组件下压的冲击力,从而避免撑脚组件对工作面造成直接冲击,使得撑脚组件与工作面之间为轻接触,实现撑脚组件的轻降轻起;而且由于清洗机器人为高空作业,如果工作面损坏掉落,会造成很大的安全问题,因此,该撑脚组件还能提高安全性能,减少安全隐患。
37.所述连接组件包括滑动套53、驱动连接板54、第一螺母55及第二螺母56,所述滑动套53内部中空,且所述滑动套53套设于所述支撑主体50上,所述支撑主体50远离所述吸盘组件52的一端固定有限位凸台501,所述滑动套53位于所述限位凸台501与所述缓冲弹簧51之间,所述驱动连接板54的其中一端与所述第二驱动机构42固定连接,另一端与所述滑动套53固定连接,所述第一螺母55与所述第二螺母56均与所述滑动套53的外壁螺纹连接,所述驱动连接板54夹持于所述第一螺母55与所述第二螺母56之间。通过设置滑动套53并将滑动套53套于支撑主体50上,实现连接组件与支撑主体50之间的滑动配合;限位凸台501可以防止滑动套53从支撑主体50的端部脱落,同时在缓冲弹簧51的弹性作用下,滑动套53可以顶紧限位凸台501,进而限制滑动套53的初始位置;两个螺母与滑动套53螺纹连接并将驱动连接板54夹持于两个螺母之间,能够防止驱动连接板54向上或向下移动,保证撑脚的正常升降运动。
38.在本实施例中,所述缓冲弹簧51在初始状态下为压缩状态,将支撑主体50与吸盘组件52连接后,缓冲弹簧51被压缩2mm
‑
5mm。在行走装置未工作时,保持缓冲弹簧51微量压缩,从而使得缓冲弹簧51始终对滑动套53施力,避免驱动机构驱动滑动套53下压的力过大而导致缓冲弹簧51的缓冲时间过长,进一步提高缓冲效果。
39.如图1至图3所示,所述触发机构还包括用于控制真空发生器60工作的微动开关36,真空发生器60与吸盘组件52配合工作使吸盘组件52产生真空,所述微动开关36设于所述导通组件31的顶部,所述微动开关36、所述第一作用开关34与所述第二作用开关35依次上下对应,所述触发压板33纵向延伸设置,且所述触发压板33纵向延伸的高度大于或等于所述第二作用开关35与所述微动开关36的开关部之间的高度。通过以上设置,触发压板33能同时触发三个开关,从而在双驱动机构带动撑脚组件升降时,真空发生器60能同时配合吸盘工作,保证行走装置正常切换行走状态,使得行走装置行走更稳定。
40.如图2所示,所述导通组件31靠近所述第二作用开关35的侧壁上设有限位板37,所述限位板37与所述导通组件31的侧壁固定连接,所述限位板37上设有与所述第二作用开关35适配的通孔,所述第二作用开关35从所述通孔中伸出。限位板37在保证触发压板33能同时触发三个开关的前提下,限制连接臂32转动的角度过大,从而导致触发压板33对三个开关过度施压,进而防止对开关造成损坏,利于延长三个开关的使用寿命。
41.所述第一安装板30上固定有连接块38,所述连接臂32与所述连接块38转动连接,所述连接臂32远离与所述连接块38连接的一端设有滚轮39,所述滚轮39与所述连接臂32之间转动连接。通过设置连接块38,实现连接臂32在安装板上的转动连接,从而实现触发压板33的正常运动;由于触发机构随双驱动机构在行走装置上一直传动位移,设置滚轮39可减少连接臂32与行走装置结构之间的摩擦力,避免磨损行走装置结构。
42.如图1所示,所述传动机构包括电机(图中未示出)、传动轴20及传动链条21,所述电机固定于所述支撑主架10上,所述传动轴20与所述支撑主架10之间转动连接,所述传动轴20由所述电机带动旋转,所述传动轴20与所述传动链条21连接并带动所述传动链条21回转,在本实施例中,传动链条21围绕支撑主架10的边缘回转,多个行走脚机构均与所述传动链条21连接。通过传动链条21带动多个行走脚机构回转,配合触发机构工作,实现行走脚机构的工作状态的切换,从而实现行走装置在工作面的水平方向上的移动。
43.如图4所示,所述传动链条21上固定连接有第一连接片22,所述双驱动机构的第二安装板40上固定连接有第二连接片23,所述第一连接片22与所述第二连接片23上设有连接孔,并通过螺栓螺母配合连接将行走脚机构安装于传动链条21上,从而实现传动链条21带动行走脚机构移动。
44.本实用新型提供的行走结构,通过设置双驱动机构,提高行走装置的升降行程,能提高行走装置的越障能力,能使行走装置能适应数量多、高度不一的障碍物,避免行走装置被障碍物阻挡无法正常移动,提高清洗机器人的清洗效率;设置触发机构及触发挡板11,当行走脚机构被传动机构传送到与触发挡板11接触的位置,触发机构被触发工作,切换双驱动机构的工作状态,控制撑脚组件的升降,进而实现切换行走装置的行走工作状态,从而实现行走装置的正常行走;行走结构的撑脚组件能缓冲双驱动机构对工作面之间的冲击力,避免对工作面造成直接冲击,实现撑脚组件的轻降轻起,防止工作面损坏掉落,提高安全性能,减少安全隐患。
45.以上实施例的目的,是对本实用新型的技术方案进行示例性的再现与推导,并以此完整的描述本实用新型的技术方案、目的及效果,其目的是使公众对本实用新型的公开内容的理解更加透彻、全面,并不以此限定本实用新型的保护范围。
46.以上实施例也并非是基于本实用新型的穷尽性列举,在此之外,还可以存在多个
未列出的其他实施方式。在不违反本实用新型构思的基础上所作的任何替换与改进,均属本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。