1.本发明属于智能机器人技术领域,具体涉及一种具有垃圾分类功能的保姆机器人。
背景技术:
2.推进生活垃圾分类,是深入环保生态建设、实现低碳生活的必然要求,是提升城市整体文明水平的客观需要,是建设绿色美好家园的重要途径。为了实现垃圾分类处理,解决环境污染、解决资源浪费等问题,实现废弃物再利用、再循环是实现可持续发展的必由之路。
3.但是当前的扫地机器人并没有垃圾分类功能,并且现有的垃圾处理机器在垃圾处理方面不够细致,现有的扫地机器人将所有的垃圾收集到一起,甚至将干垃圾和湿垃圾一起吸附近垃圾盒,这样特别不利于垃圾分类且会造成后续垃圾处理的负担较重,不符合当前推行垃圾分类政策的趋势。
技术实现要素:
4.本发明的目的是提供一种具有垃圾分类功能的保姆机器人,解决了现有的扫地机器人将干垃圾和湿垃圾统一处理并引起的后续对垃圾处理不便的问题。
5.本发明所采用的技术方案是,一种具有垃圾分类功能的保姆机器人,其特征在于,包括:
6.外壳主体,为圆柱形结构,其内部下侧设置有吸尘组件,内部上侧的设置有基于语音识别的垃圾分类组件,外壳主体的底部还设置有行走轮;
7.积水处理组件,包括设置在外壳主体底部的湿度传感器,外壳主体的底部还设置有第一电机,第一电机的输出轴上连接有第一电子伸缩杆,第一电子伸缩杆的下端周向均匀连接有多个积水刮片,还包括设置在外壳主体的侧壁上的环型集水桶,集水桶的侧壁上均匀设置有多个自动吸水器,自动吸水器的进水口与地面接触,自动吸水器的出水口与集水桶连通;
8.控制装置,设置在外壳主体的侧壁上,控制装置包括相互连接的语音识别模块和控制芯片,控制装置分别与湿度传感器、第一电机、第一电子伸缩杆、自动吸水器以及垃圾分类组件连接。
9.自动吸水器包括与集水桶呈倾斜设置的针管筒,针管筒的下端连接有针头,针管筒的上端依次连接有活塞和活塞轴,针管筒的顶端还设置有与针管筒和集水桶均连通的引水管,活塞轴的上端连接有第二电子伸缩杆,第二电子伸缩杆的伸缩端与活塞轴固定连接,第二电子伸缩杆的固定端与集水桶的侧部固定连接,第二电子伸缩杆也与控制装置连接。
10.针头的针尖恰好与地面贴合。
11.针头上还设置有圆锥形的针头保护伞。
12.集水桶的底部还设置有环型的烘干筒,烘干筒也与外壳主体的侧壁固定连接,烘
干筒内部设置有微型风机,烘干筒的底面为镂空设置,微型风机也与控制装置连接。
13.吸尘组件包括倾斜设置在外壳主体内部下侧的主吸尘通道,主吸尘通道的两端分别贯穿外壳主体的侧壁,主吸尘通道的上端连接有吸气泵,吸气泵固定在外壳主体的外侧壁上,主吸尘通道的下端穿过外壳主体的侧壁后依次连接有吸尘管和吸尘头,吸气泵也与控制装置连接,主吸尘通道的下侧设置有与主吸尘通道连通的集尘箱。
14.外壳主体内部上侧有呈十字形交叉设置的隔板,隔板将外壳主体内部的空间分为四个垃圾箱,外壳主体的顶部转动设置有垃圾密封盖,垃圾密封盖为具有四分之一扇形缺口的圆片形状,垃圾密封盖的顶部设置有第二电机,第二电机的输出轴竖直向下且下端与垃圾密封盖的顶部固定连接,第二电机与控制芯片连接,语音识别模块用于识别用户语音同时对用户语音进行判断并生成相应的垃圾分类信号并将该垃圾分类信号传递给所述控制芯片,控制芯片接收垃圾分类信号然后控制第二电机转动相应角度。
15.外壳主体的外侧壁中部还分别设置有水浸传感器、天然气泄漏报警器,水浸传感器和天然气泄漏报警器均分别与控制芯片和智能手机端连接。
16.外壳主体的外侧壁上部还设置有视频监测摄像头,视频监测摄像头也分别与控制芯片和智能手机端连接。
17.控制芯片的型号为stm32f103zet6。
18.本发明的有益效果是:
19.本发明公开的具有垃圾分类功能的保姆机器人,在进行扫地之前,需要通过自动吸水器以及烘干筒对地面的积水进行处理,待地面及垃圾上的水处理干净并使得地面和垃圾表面保持干燥后再对地面进行除尘以及垃圾吸附处理,本发明的扫地机器人解决了现有的扫地机器人将干垃圾和湿垃圾统一处理后引起的后续对集尘箱清理负担大的问题;
20.本发明公开的具有垃圾分类功能的保姆机器人,通过语音识别技术可以实现对垃圾的分类处理,解决了现有的扫地机器人不具备垃圾分类投掷的问题;
21.本发明公开的具有垃圾分类功能的保姆机器人,可以通过水浸传感器和天然气泄漏报警器对检测屋内是否发生水或者燃气泄露,如果发生水或者燃气泄露时能将该情况传递会主人的智能手机端并进行报警。
附图说明
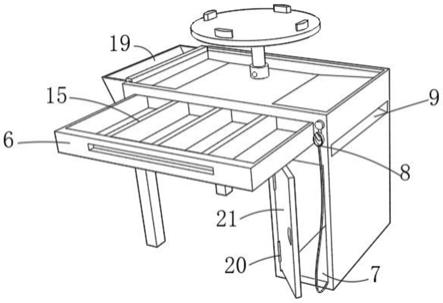
22.图1是本发明一种具有垃圾分类功能的保姆机器人的结构示意图;
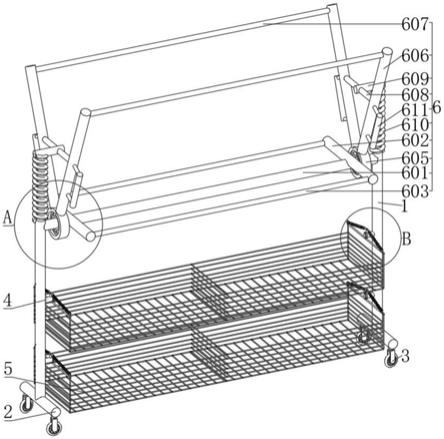
23.图2是本发明一种具有垃圾分类功能的保姆机器人上自动吸水器的结构示意图;
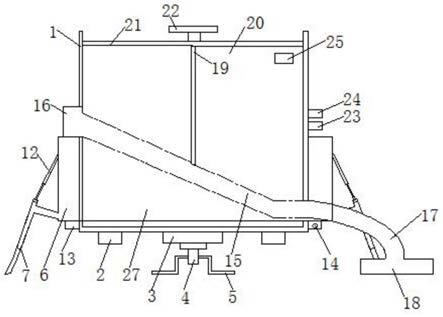
24.图3是本发明一种具有垃圾分类功能的保姆机器人上垃圾密封盖的机构示意图。
25.图中,1.外壳主体,2.湿度传感器,3.第一电机,4.第一电子伸缩杆,5.积水刮片,6.集水桶,7.自动吸水器,8.针管筒,9.针头,10.活塞,11.活塞轴,12.第二电子伸缩杆,13.烘干筒,14.微型风机,15.主吸尘通道,16.吸气泵,17.吸尘管,18.吸尘头,19.隔板,20.垃圾箱,21.垃圾密封盖,22.第二电机,23.水浸传感器,24.天然气泄漏报警器,25.视频监测摄像头,26.引水管,27.集尘箱。
具体实施方式
26.下面结合附图和具体实施方式对本发明进行详细说明。以下实施例仅用于更加清
楚的说明本发明的技术方案,而不能以此来限制本发明的保护方案。
27.实施例1
28.本发明公开的具有垃圾分类功能的保姆机器人,如图1所示,包括外壳主体1、吸尘组件、垃圾分类组件、积水处理组件、以及控制装置,其中外壳主体1为圆柱形结构,其内部下侧设置有吸尘组件,内部上侧的设置有基于语音识别的垃圾分类组件,外壳主体1的底部还设置有行走轮;积水处理组件包括设置在外壳主体1底部的湿度传感器2,外壳主体1的底部还设置有第一电机3,第一电机3的输出轴上连接有第一电子伸缩杆4,第一电子伸缩杆4的下端周向均匀连接有多个积水刮片5,还包括设置在外壳主体1的侧壁上的环型集水桶6,集水桶6的侧壁上均匀设置有多个自动吸水器7,自动吸水器7的进水口与地面接触,自动吸水器7的出水口与集水桶6连通;控制装置设置在外壳主体1的侧壁上,控制装置包括相互连接的语音识别模块和控制芯片,控制装置分别与湿度传感器2、第一电机3、第一电子伸缩杆4、自动吸水器7以及垃圾分类组件连接,其中控制芯片的型号为stm32f103zet6。本发明公开的保姆机器人可以先通过自动吸水器7先将地面的积水收集到集水桶6内,待底面干燥后再将垃圾进行分类处理,另外还可以通过语音识别信息实现对垃圾的分类处理。
29.实施例2
30.进一步的,在实施例1的基础上,如图2所示,自动吸水器7包括与集水桶6呈倾斜设置的针管筒8,针管筒8的下端连接有针头9,针管筒8的上端依次连接有活塞10和活塞轴11,针管筒8的顶端还设置有与针管筒8和集水桶6均连通的引水管26,活塞轴11的上端连接有第二电子伸缩杆12,第二电子伸缩杆12的伸缩端与活塞轴11固定连接,第二电子伸缩杆12的固定端与集水桶6的侧部固定连接,第二电子伸缩杆12也与控制装置连接。当湿度传感器湿度较大时,代表地面或者地面上的垃圾上可能存在积水,此时控制装置控制第二电子伸缩杆12开始工作,第二电子伸缩杆工作时带动自动吸水器7上的活塞10开始工作,此时自动吸水器开始吸水,地上的积水先进入到针管筒8,再通过与集水桶6连接的引水管26进入到集水桶内保存。
31.进一步的,针头9的针尖恰好与地面贴合,保证能将积水清理干净;另外针头9上还设置有圆锥形的针头保护伞,可以延长针头9的使用寿命。
32.进一步的,为了提高地面积水的处理效果,集水桶6的底部还设置有环型的烘干筒13,烘干筒13也与外壳主体1的侧壁固定连接,烘干筒13内部设置有微型风机14,烘干筒13的底面为镂空设置,微型风机14也与控制装置连接,通过自动吸水器7对地面的积水进行处理后,控制装置可以通过控制微型风机14对地面进行进一步的处理,保证地面干燥后再进行除尘操作。
33.实施例3
34.进一步的,在实施例2的基础上,吸尘组件包括倾斜设置在外壳主体1内部下侧的主吸尘通道15,主吸尘通道15的两端分别贯穿外壳主体1的侧壁,主吸尘通道15的上端连接有吸气泵16,吸气泵16固定在外壳主体1的外侧壁上,主吸尘通道15的下端穿过外壳主体1的侧壁后依次连接有吸尘管17和吸尘头18,吸气泵16也与控制装置连接,主吸尘通道15的下侧设置有与主吸尘通道15连通的集尘箱27;待底面的垃圾被完全干燥后,控制装置通过吸气泵16将地面的垃圾吸附到集尘箱27内,并且被吸入到集尘箱内的垃圾均已经经过干燥,不会对集尘箱27进行污染,因此也方便了使用者对集尘箱27内部进行清理,集尘箱27的
底部还设置有用于清理垃圾的垃圾出口。
35.实施例4
36.进一步的,在实施例3的基础上,如图3所示,外壳主体1内部上侧有呈十字形交叉设置的隔板19,隔板19将外壳主体1内部的空间分为四个垃圾箱20,每个垃圾箱的底部设置有垃圾出口,且该垃圾出口处铰接设置有密封盖;四个垃圾箱20分别为可回收垃圾箱、厨房垃圾箱、有害物质垃圾箱和其他垃圾箱,外壳主体1的顶部转动设置有垃圾密封盖21,垃圾密封盖21为具有四分之一扇形缺口的圆片形状,垃圾密封盖21的顶部设置有第二电机22,第二电机22的输出轴竖直向下且下端与垃圾密封盖21的顶部固定连接,第二电机22与控制芯片连接,语音识别模块用于识别用户语音同时对用户语音进行判断并生成相应的垃圾分类信号并将该垃圾分类信号传递给控制芯片,控制芯片接收垃圾分类信号然后控制第二电机22转动相应角度。因此当语音识别模块识别到瓶子、废纸、金属或者布料等语音信息时,会将该分类信号传递给控制芯片,此时控制芯片控制第二电机22转动一定角度,使得垃圾密封盖21上的扇形缺口与可回收垃圾箱的顶部对齐,此时,可以往可回收垃圾箱内投掷垃圾;当语音识别模块识别到各种蔬菜名、饭菜名或者果皮等语音信息时,会将该分类信号传递给控制芯片,此时控制芯片控制第二电机22转动一定角度,使得垃圾密封盖21上的扇形缺口与厨房垃圾箱的顶部对齐,此时,可以往可厨房垃圾箱内投掷垃圾;当语音识别模块识别到烟头或者尘土等语音信息时,会将该分类信号传递给控制芯片,此时控制芯片控制第二电机22转动一定角度,使得垃圾密封盖21上的扇形缺口与其他垃圾箱的顶部对齐,此时,可以往可其他垃圾箱内投掷垃圾;当语音识别模块识别到电池、废气油漆或者过期药品等语音信息时,会将该分类信号传递给控制芯片,此时控制芯片控制第二电机22转动一定角度,使得垃圾密封盖21上的扇形缺口与有害物质垃圾箱的顶部对齐,此时,可以往可有害物质垃圾箱内投掷垃圾。本发明这种基于语音识别的垃圾分类组件,会提前将不同垃圾桶的各项关键词预设好,因此语音识别模块识别到用户语音时就可以通过控制芯片控制第二电机动作,并使得垃圾密封盖21上的扇形缺口与对应垃圾箱的顶部对齐,从而方便人们将垃圾进行分类投掷;同时本发明的保姆机器人可以提前预设好行车轨迹以及相应的语音信息,当需要投掷垃圾时,使用者可以发出相应的呼叫信号,此时机器人可以行走到指定的地点供人投掷垃圾,该保姆机器人随叫随到,实现了几个房间公用一个垃圾桶。
37.实施例5
38.进一步的,在实施例4的基础上,外壳主体1的外侧壁中部还分别设置有水浸传感器23、天然气泄漏报警器24,水浸传感器23和天然气泄漏报警器24均分别与控制芯片和智能手机端连接。外壳主体1的外侧壁上部还设置有视频监测摄像头25,视频监测摄像头25也分别与控制芯片和智能手机端连接。因此如果水浸传感器23检测到屋内发生水泄露,或者屋内发生燃气泄露,本发明的保姆机器人通过控制芯片将该新型无线传递给主人的智能手机端并进行报警,同时,视频监测摄像头25也会将拍到的屋内情况实时传递给主人的智能手机端,主人接收到该信号后可以第一时间进行处理,避免发生更大的安全隐患。
39.以上所述的实施例仅为本发明较佳的具体实施方式,本发明的保护范围不限于此,任何熟悉本领域的技术人员在本发明披露的技术范围内,可显而易见的得到的技术方案的简单变化或者等效替换,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。