1.本发明涉及一种模仿砂鱼蜥运动的驱动式摇摆减阻深松机,属于农业机械领域。
背景技术:
2.深松整地是为了给农作物生长提供有力条件,也是为了粮食基础生产能力提升做的有效措施,深松技术也是保护性耕作技术的一种,它打破土壤沉积形成的犁底层,可以有效改善耕层土壤的气密性和疏松程度,建立起良好的耕层结构,还能起到保持微生物区系,并且可以减轻对下层嫌气性微生物的抑制。
3.目前深松过程中会存在很大的能量耗散,并且土壤对机具的粘附和堆积作用,导致前进阻力增加,致使消耗的燃料增多,所以迫切需要寻求新的技术方案,减少摩擦、降低油的消耗量以及前期费用。深松作业过程中经常出现疲劳失效的情况多有发生,发现不及时会严重影响耕作效率,延误农时。因而,耕作时的节能减阻研究在理论和实践上均有重要意义,所以迫切需要寻求新的技术方案。
4.现有技术中的深松机采用的减阻方法主要有:振动减阻、电渗减阻、磁化减阻、仿生减阻等。当前,振动减阻是各种减阻节能措施中效果最为明显的,但是现有的振动减阻方式均属于强迫式振动,通过强迫振动使土散落,虽然工作阻力减少了,但是驱动振动部件使拖拉机发动机功率消耗增加,省力却不省功。仿生减阻也多有应用,但仿生减阻多从触土部件着手,仿生减阻的效益虽得到提升,但未能提升深松机整体性能的优化。目前深松机工作阻力较大、工作能耗过高,并且耕作整地范围相对有限。所以迫切需要寻求新的技术措施与方法,减少耕作阻力、降低能源消耗、提高能源利用。
技术实现要素:
5.为了克服背景技术中存在的问题,本发明借助摇摆机构实现深松铲摇摆破土切削过程,依靠这种滑切式破土的过程大大减少了入土阻力,整个深松过程,通过摆动来扩大深松范围,整地效果得到提升,同时,由摇摆机构作为振动源,将积累在铲柄上的土震动下来避免堆积在深松铲摇摆工作期间,能够将堆积在深松铲铲柄上的土偏移至两侧,减少了前进方向上的阻力,降低了能量损耗,减少入土阻力和前进方向上的总能耗,以及降低深松铲柄及零部件的强度要求,避免因强度不够造成的零件的损伤,延长了深松铲等部件的使用寿命,也大大提升了整地的效率。
6.为了克服背景技术中存在的问题,为解决上述问题,本发明通过如下技术方案实现:
7.所述模仿砂鱼蜥运动的驱动式摇摆减阻深松机包括机架、摇摆机构、深松铲,所述机架上安装有连接深松铲的摇摆机构,经驱动后的摇摆机构带动深松铲做循环摆动动作,并通过摇摆进行破土切削作业。
8.优选地,所述曲柄连杆机构连接有驱动装置,所述驱动装置包括电机、动力输出轴、控制箱、信号接收器,所述电机通过齿轮传动机构与动力输出轴相连接,电机通过信号
接收器与控制箱相连接。
9.优选地,所述机架上通过拉力传感器与牵引装置相连接,拉力传感器与控制箱相连接。
10.优选地,所述摇摆机构包括曲柄连杆机构、摇摆杆架、旋转轴、旋转固定板,所述曲柄连杆机构与动力输出轴相连接,曲柄连杆机构还铰接有安装在机架上的摇摆杆架,旋转轴通过轴承竖直安装于机架上,旋转轴上固定安装有旋转固定板和从动杆,从动杆与摇摆杆架相铰接,旋转固定板上安装有深松铲。
11.优选地,所述机架上设置有滑杆导孔,摇摆杆架滑动连接于滑杆导孔位置。
12.优选地,所述曲柄连杆机构包括曲柄、驱动连杆、滑套,所述驱动连杆两端分别与机架和摇摆杆架相铰接,驱动连杆上套接有滑套,曲柄一端铰接滑套,另一端固定连接于动力输出轴上。
13.优选地,所述旋转固定板上沿不同高度位置开设有安装孔,深松铲通过螺栓连接安装于安装孔位置。
14.优选地,所述机架上安装有套筒,套筒内滑动连接有安装地轮的支撑杆,套筒上沿竖直位置均匀开着有插孔,支撑杆通过插销固定在套筒上。
15.本发明的有益效果为:
16.本发明借助摇摆机构实现深松铲摇摆破土切削过程,依靠这种滑切式破土的过程大大减少了入土阻力,整个深松过程,通过摆动来扩大深松范围,整地效果得到提升,同时,由摇摆机构作为振动源,将积累在铲柄上的土震动下来避免堆积在深松铲摇摆工作期间,能够将堆积在深松铲铲柄上的土偏移至两侧,减少了前进方向上的阻力,降低了能量损耗,减少入土阻力和前进方向上的总能耗,以及降低深松铲柄及零部件的强度要求,避免因强度不够造成的零件的损伤,延长了深松铲等部件的使用寿命,也大大提升了整地的效率。
附图说明
17.图1为本发明的结构示意图;
18.图2为本发明的机架结构意图;
19.图3为本发明的电机和动力输出轴配合关系示意图;
20.图4为本发明的摇摆机构示意图;
21.图5为本发明的摇摆杆架及其他传动装置配合关系示意图;
22.图6为本发明控制系统的结构示意图;
23.图7为本发明曲柄滑块摇摆机构空间位置示意图;
24.图8为本发明导杆滑块机构的运动分析图;
25.图9为本发明深松铲运动规律图;
26.图10为本发明控制系统流程图;
27.图11为本发明拉力转速匹配关系图.
28.图中标号为:1
‑
机架、2
‑
地轮、3
‑
电机、4
‑
动力输出轴、5
‑
驱动连杆、6
‑
摇摆杆架、7
‑
固定销、8
‑
深松铲铲柄、9
‑
深松铲铲尖、10
‑ꢀ
摇摆机构、11
‑
滚动轴承、13
‑
滑套、14
‑
销轴、15
‑
控制箱、16
‑
信号线、17
‑
拉力传感器、18
‑
牵引装置、1.1
‑
牵引孔、1.2
‑
滑杆导孔、1.3
‑ꢀ
滚动轴承固定孔、1.4
‑
固定轴、3.1
‑
信号接收器、3.2
‑
电机动力输出装、4.1
‑
锥齿轮、4.2
‑
曲柄、
6.1
‑
腰子孔、10.1
‑
固定底板、10.2
‑ꢀ
旋转轴、10.3
‑
轴支架、10.4
‑
旋转固定板、10.5
‑
轴承、10.6
‑
从动杆。
具体实施方式
29.为了使本发明的目的、技术方案和有益效果更加清楚,下面将结合附图,对本发明的优选实施例进行详细的说明,以方便技术人员理解。
30.如图1
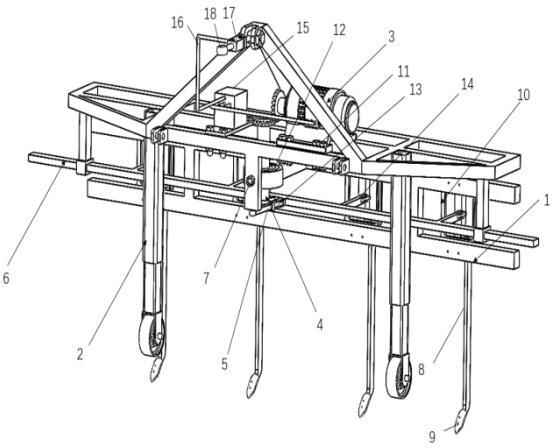
‑
11所示,所述模仿砂鱼蜥运动的驱动式摇摆减阻深松机包括机架1、摇摆机构10、深松铲,所述机架1上安装有连接深松铲的摇摆机构10,经驱动后的摇摆机构10带动深松铲做循环摆动动作,并通过摇摆进行破土切削作业。机架1上设置牵引孔1.1,通过与拖拉机连接实现深松机的前进。
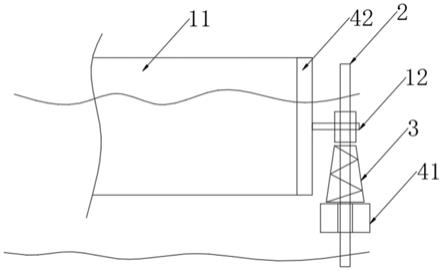
31.所述曲柄4.2连杆机构连接有驱动装置,所述驱动装置包括电机 3、动力输出轴4、控制箱15、信号接收器3.1,所述电机3通过齿轮传动机构与动力输出轴4相连接,电机3通过信号接收器3.1与控制箱15相连接。电机3安装在机架1的顶端,电机3上的信号接收器3.1连接控制箱15,以此得到匹配拖拉机牵引的动力转速,以此为摇摆机构10提供动力。在本实施例中,电机3的输出轴通过锥齿轮传动机构4.1与竖直安装的动力输出轴4相连接,机架1上设置滚动轴承10.5固定孔1.3,滚动轴承10.5固定孔1.3内安装有用于承接动力输出轴4的滚动轴承10.512,滚动轴承10.5固定孔1.3固定滚动轴承10.512,保证动力输出轴4位置固定;主动力轴固定孔主要作用是固定主动力轴。固定销7固定在机架1的前端;深松铲铲柄 8固定在摇摆机构10的后面,其方位在机架1的后端;深松铲铲尖9 固定在深松铲铲柄8下端,滚动轴承10.512其位置在机架1的前端中部,牵引孔1.1与拖拉机悬挂机构相连接
32.所述机架1上通过拉力传感器17与牵引装置18相连接,拉力传感器17与控制箱15相连接。控制箱15安装在机架1上端,其上有信号线16,连接电机3和拉力传感器17。拉力传感器17在机架1的顶端,与牵引孔1.1连接,同时与牵引装置18(一般为拖拉机)连接,实现拉力信号传输,拉力传感器17检测拖拉机在耕作过程中的牵引力变化,将拉力信号传送给控制箱15,控制箱15将传送的拉力信号转换成电机3可接收的控制信号,将控制信号传送给电机3,电机3得到控制信号后匹配同步牵引力下的电机3转速,实现整机的同步摇摆频率,最终实现同步摇摆深松作业。
33.所述摇摆机构10包括曲柄4.2连杆机构、摇摆杆架6、旋转轴 10.2、旋转固定板10.4,所述曲柄4.2连杆机构与动力输出轴4相连接,曲柄4.2连杆机构还铰接有安装在机架1上的摇摆杆架6,旋转轴10.2通过轴承10.5竖直安装于机架1上,旋转轴10.2上固定安装有旋转固定板10.4和从动杆10.6,从动杆10.6与摇摆杆架6 相铰接,旋转固定板10.4上安装有深松铲。在本实施例中,机架1 上安装有固定底板10.1,旋转轴10.2通过轴承10.5竖直安装于固定底板10.1上。固定底板10.1固定在机架1的后端,固定底板10.1 上开设窗口,便于从动杆10.6伸出与摇摆杆架6铰接,旋转轴10.2 与摇摆杆架6的腰子孔6.1通过销轴14固定后形成铰接结构,腰子孔6.1的间隙能够适应摇摆过程中销轴14的位置变化,实现摇摆运动。轴支架10.3固定在旋转轴10.2上,实现与旋转轴10.2同轴旋转。所述旋转固定板10.4上沿不同高度位置开设有安装孔,深松铲通过螺栓连接安装于安装孔位置,通过与不同高度位置的安装孔连接调整深松深度,随之旋转固定板10.4摆动大小,深松铲的摆动范围随之增大。摇摆杆架6,在本发明中起到承接作用,将驱动连杆5带来的动力传输给摇摆机构10上
[0041][0042]
其中b已知,则a=81.72mm。其中c的最大位置为a b=386.72mm。
[0043]
又根据相似三角形定律:一个直角三角形的斜边与另一个直角三角形的斜边对应成比例那么这两个三角形为相似三角形。
[0044]
由d=550mm,e=110mm,对两杆在空间位置上构建直角三角形,由于d和e成比例关系,故可以构成两个相似得直角三角形(1)和 (2),所以摆角θ2和θ3大小对应相等。随着曲柄滑块机构的摆动,此相似直角三角形依旧成立,摆角θ2和θ3依旧等大,实现同步运转。导杆滑块机构的运动分析图如图8所示.
[0045]
导杆机构的运动分析:
[0046]
通过图8计算得到导杆机构的曲柄长a=81.72mm,中心距 b=305mm,其他需要知道的参数有转角φ1、等角速度ω1;可以根据上面已知求出导杆角位移φ2、角速度ω2和角加速度ε。此运动分析只是为了提供一种理论指导,根据输入相应得转角φ1,等角速度ω1便可推算出本机构得位置分析、速度分析、以及加速分析,为本机构提供一种转角φ1和等角速度ω1下得运动分析,所有要求只适用于本发明的特定情况,下面为相应分析公式:
[0047]
1.依据位置分析:
[0048]
a b=s
[0049][0050]
(1)
[0051]
acosφ1=scosφ2[0052]
b asinφ1=ssinφ2[0053]
两式相处,得
[0054][0055]
2.速度分析
[0056]
对式(1)求导数,得
[0057][0058]
(2)
[0059]
两边分别乘以得
[0060][0061]
取实部相等,得
[0062]
ν0=
‑
aω1sin(φ1‑
φ2)
[0063]
取虚部相等,得
[0064]
[0065]
3.加速度分析:
[0066][0067]
两边分别乘以得
[0068]
取实部相等,得
[0069][0070]
取虚部相等,得
[0071][0072]
故
[0073][0074][0075]
现给定特殊条件:转角φ1=0
°
,等角速度ω1=3rad/s,故通过上述位置公式求得:tanφ2=4.883,则φ2=78.427
°
,同时可以算出导杆位置长度s=352.09mm;根据上述速度分析公式可以求得:ν0=122.58,ω2=0.603rad/s;根据加速度公式分析可以得到ε= 0.624m/s2。计算上述的参数,为了保证设计在拖拉机运行速度的合理性,保证曲柄滑块机构在拖拉机相应速度下的角加速度ω2,加速度ε,以及相应情况下的空间位置关系,为机构的稳定性提供理论支持。
[0076]
以下图为深松铲的受力分析,以及深松铲摆动规律的示意图,通过改变摆动角度从而实现最好的破土方式,以及最优的减阻情况,来规避前方土壤阻力以及土壤堆积下来形成的阻力,通过受力分析为本发明提供理论指导作用。深松铲运动规律图如图9所示。
[0077]
借助拖拉机拉力提供一定速度,其力不受来自其他部分的力场的影响。借助摆动角度的大小来实现在深松铲两侧形成法向力f
n
和侧向力f
l
(分别与单元垂直和平行),如式:
[0078]
f
n
=2lr(c
s
sinβ0 c
f
sinψ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0079]
f
l
=2lrc
f
cosψ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0080]
tanβ0=cotγsinψ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0081]
其中,v
x
为前进速度,θ为单元与整体前进方向之间的夹角,ψ为单元运动矢量的角度,l和r是单元的长度和半径(假定圆柱形),常数c
s
、c
f
和γ表征了材料对阻力的响应。
[0082]
本发明为了实现拖拉机与深松机的同步运行匹配程度,加入了控制系统,通过与拖拉机牵引装置相连接的拉力传感器,将拉力数值传送给控制箱,控制箱通过拉力来配送电机转速,实现整机的传动和深松铲摇摆幅度,实现同步一体化,降低深松铲在作业时的使用损伤。控制系统流程图如图10所示。
[0083]
本发明提供一种控制系统拉力与电机转速匹配关系,且仅限于本发明使用,具体流程根据相关工作者需要进行调控。本发明通过给控制箱进行调频,使控制信号达到呈现线性趋势,本文模拟设定关系为一种拉力对应一种电机转速,整体呈现随拉力增加电机转速也随之增加的线性增长趋势,线性增长关系如图11所示:
[0084]
本发明结合对仿生学的研究,将其运用到农业机械特别是深松机研究上,本发明
将砂鱼蜥运动结合在深松机上,借助曲柄滑块机构实现摇摆机构摇摆,从而实现了摇摆破土切削过程。依靠这种滑切式破土的过程大大减少了入土阻力。整个深松过程,通过摆动来扩大深松范围,整地效果得到提升。在相同的工况下,传统型深松耕作方式农机具需要承受更多的阻力,以及需要面临土壤粘附性粘结在深松铲上的问题,不仅增加了大量的能源消耗,还将大大增加深松过程中农机具损坏的可能性。本发明借助左右摇摆和拖拉机驱动前进,将堆积在深松铲铲柄上的土偏移至两侧,减少了前进方向上的阻力,降低了能量损耗,同时也降低了深松铲零部件的损耗,延长了深松铲等部件的使用寿命。本发明借助控制系统,依靠拖拉机牵引力的变化,实现调控电机转速的功能,从而改变摇摆频率,随拖拉机牵引变化,从而节省了功耗。
[0085]
最后说明的是,以上优选实施例仅用以说明本发明的技术方案而非限制,尽管通过上述优选实施例已经对本发明进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离本发明权利要求书所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。