1.本发明涉及道路施工测绘技术领域,具体涉及一种无人机测绘测量系统及测量方法。
背景技术:
2.在道路施工中测绘是非常重要的工作,目前的测量工作主要是人工借助摄影辅助来完成,人工测量攀爬困难,而且需要完成重复多点位测量任务,工作量大,而且传统摄影测量定位精度低,测量误差大,无法满足施工现场多场景放线、测量、检测的实际需求。
技术实现要素:
3.为此,本发明提供一种无人机测绘测量系统及测量方法,以解决现有技术中工作量大、测量误差大,无法满足施工现场多场景放线、测量、检测的实际需求的问题。
4.为了实现上述目的,本发明提供如下技术方案:
5.该无人机测绘测量系统包括无人机和地面控制终端,在所述无人机上安装有导航组件和激光束导引装置,所述地面控制终端安装有地图,所述导航组件与所述地面控制终端连接,无人机的位置在所述地图上显示。
6.进一步地,所述地面控制终端为平板电脑。
7.进一步地,所述激光束导引装置安装在所述无人机的正下方。
8.进一步地,所述无人机为四旋翼无人机。
9.进一步地,导航组件为rtk定位模块。
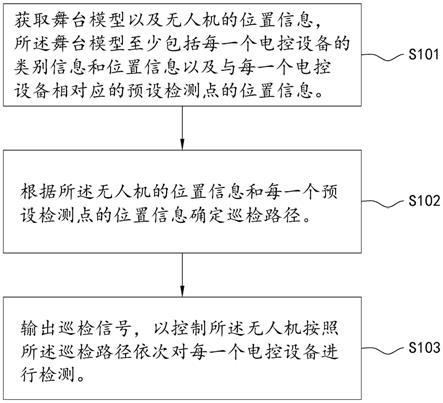
10.进一步地,包括以下步骤:
11.(1)、在所述地面控制终端的地图上设置坐标点位,引导所述无人机飞行至坐标点位;
12.(2)、所述激光束导引装置投射光点至地面;
13.(3)、施工作业人员根据所述光点定木桩或喷色标,作为施工作业开挖和占地依据,完成施工放线任务。
14.进一步地,步骤(1)中所述无人机飞行至所述坐标点位附近时,由施工作业人员手动控制所述无人机,根据所述坐标点位对所述无人机进行偏差修正,当所述无人机与所述坐标点位的偏差在设定阈值内后进行步骤(2)。
15.进一步地,所述设定阈值为2cm。
16.进一步地,所述激光束导引装置与地面控制终端连接,步骤(1)地面控制终端判断所述无人机飞行至坐标点位后,步骤(2)所述激光束导引装置自动投射光点至地面。
17.进一步地,步骤(1)所述无人机飞行至坐标点位上方后悬停,步骤(2)所述激光束导引装置投射光点至地面。
18.本发明具有如下优点:
19.本发明利用导航组件和激光束导引装置对地面进行测量,利用地面控制终端的地
图预先设定点位,然后利用无人机对地面实际点位进行定位,最后利用激光束导引装置对地面点位进行标记,指引施工作业人员定木桩或喷色标,作为施工作业开挖和占地依据,完成施工放线任务。是传统gps测量手段的有力补充,可实时动态测量采集高精度点云数据和丰富的影像信息,能够帮助解决人工测量攀爬困难和重复多点位测量任务,定位精度高,是传统(摄影)测量做不到的。高度集成系统体积小可靠性高,可满足施工现场多场景放线、测量、检测等实际需求。
附图说明
20.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引申获得其它的实施附图。
21.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
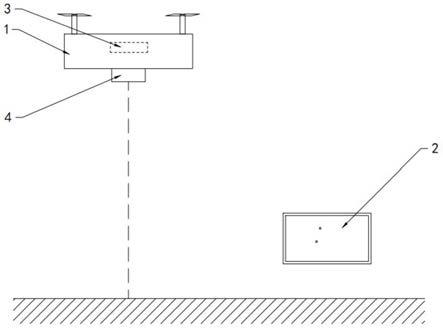
22.图1为本发明实施例1提供的一种无人机测绘测量系统的示意图;
23.图中:1
‑
无人机,2
‑
地面控制终端,3
‑
rtk定位模块,4
‑
激光束导引装置。
具体实施方式
24.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等的用语,亦仅为便于叙述明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
25.实施例1
26.参见图1,该无人机测绘测量系统包括无人机1和地面控制终端2,在无人机1上安装有导航组件和激光束导引装置4,地面控制终端2安装有地图,导航组件与地面控制终端2连接,无人机1的位置在地图上显示。
27.本实施例中的地面控制终端2为平板电脑,在平板电脑上安装地图app,并将无人机1连接平板电脑,使无人机1的位置实时显示在平板电脑的地图app上。
28.本实施例所采用的导航组件为rtk定位模块3,在公路、桥梁施工过程中测量要求精度非常高,但是普通的gps导航无法达到测量所要求的精度,所以本技术使用了rtk定位模块3。
29.rtk(real time kinematic)即载波相位差分技术,rtk定位模块3能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度,从而满足公路、桥梁施工过程中测量精度的要求。在rtk作业模式下,基站采集卫星数据,并通过数据链将其观测值和站
点坐标信息一起传送给移动站,而移动站通过对所采集到的卫星数据和接收到的数据链进行实时载波相位差分处理,得出厘米级的定位结果。在本实施例中基站即为无人机1,而地面控制终端2则为移动站,本实施例利用利用rtk技术,将无人机1位置准确显示在地面控制终端2的地图上,并通过控制无人机1使其在地图上的标识与地图上预先设定的坐标点位重合,实现无人机1和人工操控系统融合,解决自动技术无法达到精度要求、而人工劳动量大的问题。
30.无人机1为四旋翼无人机,四旋翼无人机飞行稳定,而且能够稳定悬停,便于激光束导引装置4准确投射光点。激光束导引装置4安装在无人机1的正下方,激光束导引装置4采用一般的激光束发生器就可以满足标记要求。在无人机1上还设有相机,能够获取丰富的影像信息。无人机1能够帮助解决人工测量攀爬困难和重复多点位测量任务,定位精度高,是传统(摄影)测量做不到的。该无人机测绘测量系统具有高度集成系统、体积小、可靠性高的特点,可满足施工现场多场景放线、测量、检测等实际需求。
31.在新建、改建公路施工中,原地面永久占地(红线)施工便道、拌合场、站临时占地,划界测量,原地面复测及土方量精确计算,以及原地面附着物,影像资料,数据采集,桥梁桩基施工钻点定位,施工过程(工序)自检、复检工作,路基边界放线、复核,排水沟、渠、涵洞施工开挖定位,隧道施工等方面,极大提高作业效率,有效降低和改善作业人员劳动强度,实现了从传统到自动化的技术飞跃。在极端天气、复杂地质环境和应急抢险过程中,能快捷实现数据回传,精确定位和测算遇险区域位置和工程作业量,为抢险救援提供数据支持。无人机1集成一键起飞、降落、自寻坐标设定点位功能,并且还具有光测定高装置设计,植入指定航迹飞行等先进技术合成应用系统,有针对性地满足施工用户需求,为工程施工测绘测量工作提供了最优化的解决方案。市场前景广阔产品极具市场竞争力,并将为社会创造更多价值。
32.该无人机测绘测量系统的测量方法包括以下步骤:
33.(1)、在地面控制终端2的地图上设置坐标点位,引导无人机1飞行至坐标点位;
34.(2)、激光束导引装置4投射光点至地面;
35.(3)、施工作业人员根据光点定木桩或喷色标,作为施工作业开挖和占地依据,完成施工放线任务。
36.在上述步骤(1)中,当无人机1飞行至坐标点位附近时,由施工作业人员手动控制无人机1,根据平板电脑上预先设定的坐标点位对无人机1进行偏差修正,当无人机1与坐标点位的偏差在设定阈值内后进行步骤(2)。
37.本实施例中无人机1与坐标点位偏差的设定阈值为2cm,也就是当无人机1距离预先设定位置距离小于2cm时表示无人机1到位,可以继续进行步骤(2),而在平板电脑上,是通过地图上所显示无人机1在地图上的标识与地图上预先设定的坐标点位的实际距离是否小于2cm来判断。
38.激光束导引装置4与地面控制终端2连接,步骤(1)中地面控制终端2判断无人机1飞行至坐标点位后,无人机1飞行至坐标点位上方后悬停,步骤(2)激光束导引装置4自动投射光点至地面。
39.本发明利用导航组件和激光束导引装置4对地面进行测量,利用地面控制终端2的地图预先设定点位,然后利用无人机1对地面实际点位进行定位,最后利用激光束导引装置
4对地面点位进行标记,指引施工作业人员定木桩或喷色标,作为施工作业开挖和占地依据,完成施工放线任务。是传统gps测量手段的有力补充,可实时动态测量采集高精度点云数据和丰富的影像信息,能够帮助解决人工测量攀爬困难和重复多点位测量任务,定位精度高,是传统(摄影)测量做不到的。高度集成系统体积小可靠性高,可满足施工现场多场景放线、测量、检测等实际需求。
40.实施例2
41.本实施例中的导航组件为北斗导航系统,随着北斗导向系统的逐渐完善,北斗导航系统的精度也在逐渐提高,在一般性的施工中,北斗导航已经能够满足定位精度要求。
42.实施例3
43.本实施例中无人机测绘测量系统的测量方法包括以下步骤:
44.(1)、在地面控制终端2的地图上设置坐标点位,引导无人机1飞行至坐标点位附近,然后由测量人员手动操作无人机1,使无人机1与地面控制终端2的地图上设置的坐标点位重合;
45.(2)、手动操作激光束导引装置4,使激光束导引装置4投射光点至地面;
46.(3)、施工作业人员根据光点定木桩或喷色标,作为施工作业开挖和占地依据,完成施工放线任务。
47.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。