1.本发明涉及一种基坑支护设备,尤其涉及一种用于市政隧道可拆解重复利用基坑支护设备。
背景技术:
2.基坑支护,是为保证地下结构施工及基坑周边环境的安全,对基坑侧壁及周边环境采用的支挡、加固与保护措施,基坑支护对防止基坑发生塌方具有重大的作用,但是传统的基坑支护在使用时,缺乏专门的固定装置,虽然可以对基坑起到一定的支护作用,但防护作用有限,无法避免塌方的发生,一旦塌方事故发生,则传统的支护方案无法进行有效的阻挡,并且隧道中的地下水需要工作人员进行手动引导,防止地下水破坏隧道的内部结构,隧道内部的石块分散比较混乱,需要工作人员对石块进行收集,并集中进行处理,增加了工作人员的工作量。
3.为此,我们设计了一种实现自动支护隧道内部、对地下水进行排放和集中收集石块的用于市政隧道可拆解重复利用基坑支护设备。
技术实现要素:
4.为了克服传统基坑支护设备无法自动支护隧道内部、无法对地下水进行排放和无法集中收集石块的缺点,本发明提供一种实现自动支护隧道内部、对地下水进行排放和集中收集石块的用于市政隧道可拆解重复利用基坑支护设备。
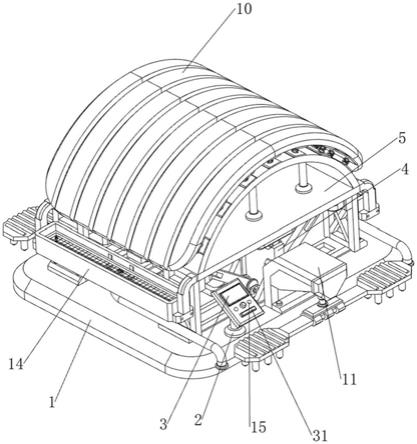
5.本发明是这样实现的,一种用于市政隧道可拆解重复利用基坑支护设备,包括:底座、支撑台、第一接触开关、第一导向套、支护架、滑块、导向槽、支撑杆、第一限位块、第一支撑架、移动轮、缓冲机构、防滑机构、支护机构和固定机构,底座上设有支撑台,支撑台下部设有第一接触开关,底座上中部两侧均设有第一导向套,两个第一导向套之间滑动式连接有支护架,底座上中部两侧均设有两个导向槽,导向槽与第一导向套连接,四个导向槽内侧均滑动式设有滑块,四个滑块上部均转动式设有支撑杆,底座上两侧均设有两个第一支撑架,第一支撑架与导向槽连接,四个第一支撑架上部均设有第一限位块,第一限位块与支撑杆滑动式连接,底座两侧均转动式设有两个移动轮,支护架上侧设有缓冲机构,底座上设有防滑机构,底座上设有支护机构,两个第一导向套之间设有固定机构。
6.在本发明一个较佳实施例中,缓冲机构包括:支护架顶部设有多根第一伸缩杆,纵向同侧的多根第一伸缩杆顶端均连接有固定板,多根第一伸缩杆上均绕有第一伸缩弹簧,第一伸缩弹簧两端分别与支护架和固定板连接,多个固定板顶部之间连接有用来固定隧道墙面的支护板。
7.在本发明一个较佳实施例中,防滑机构包括:底座上中部两侧均设有第二支撑架,两个第二支撑架上部均安装有第一电动推杆,两根第一电动推杆的伸缩杆底端均连接有第一连接板,两个第一连接板底部两侧均设有多个用来插入隧道地面的防滑钉,一侧的第二支撑架上部设有第一距离传感器。
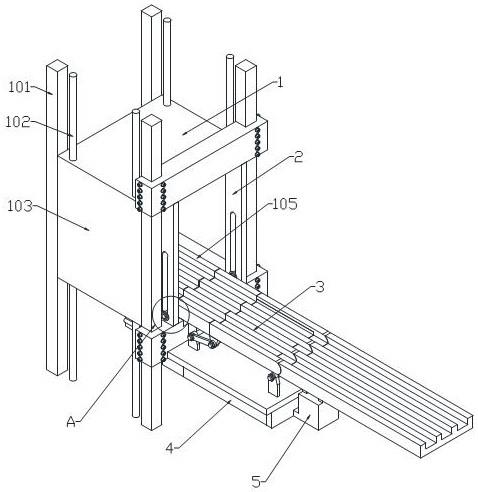
8.在本发明一个较佳实施例中,支护机构包括:底座上中部两侧均设有轴承座,底座上中间安装有双轴减速电机,双轴减速电机输出轴上两侧均连接有丝杆,丝杆与轴承座连接,丝杆两侧均螺纹式设有第二连接板,第二连接板两侧分别与同侧的滑块连接,一侧的滑块上设有数字霍尔传感器,一侧的导向槽上设有强磁铁。
9.在本发明一个较佳实施例中,固定机构包括:支护架底部中间设有第三支撑架,第三支撑架上两侧均设有多根第二伸缩杆,横向同侧的多根第二伸缩杆之间均连接有第二限位块,多根第二伸缩杆上均绕有第二弹簧,第二弹簧两端分别与第三支撑架和第二限位块连接,第三支撑架顶部中间安装有第二电动推杆,第二电动推杆的伸缩杆与一侧的第二限位块连接,第三支撑架底部中间安装有第三电动推杆,第三电动推杆的伸缩杆与一侧的第二限位块连接,第三支撑架中部两侧均设有第二导向套,第二导向套与第二限位块滑动式连接,一侧的第一导向套上部中间设有第二距离传感器。
10.在本发明一个较佳实施例中,还包括有防堵机构,防堵机构包括:支护架下部两侧均设有用来存放地下水的排水槽,两个排水槽内壁中部均滑动式设有用来收集石块的筛板,两个排水槽与底座之间均连接有导流管,两个排水槽内壁均设有多根第三伸缩杆,第三伸缩杆与筛板连接,多根第三伸缩杆上均绕有第三弹簧,第三弹簧两端分别与排水槽和筛板连接。
11.在本发明一个较佳实施例中,还包括有除块机构,除块机构包括:支撑台下部中间设有第二接触开关,支撑台下部设有第一指示灯,支撑台下部设有第二指示灯,第三支撑架顶部两侧均设有第三导向套,两个第三导向套上均滑动式设有顶块,顶块与排水槽滑动式连接,第三支撑架顶部安装有第四电动推杆,第四电动推杆的伸缩杆与一侧的顶块连接,一侧的排水槽内壁中部设有第一压力传感器,第三支撑架顶部安装有第五电动推杆,第五电动推杆的伸缩杆与一侧的顶块连接,一侧的排水槽内壁中部设有第二压力传感器。
12.在本发明一个较佳实施例中,还包括有控制箱,支撑台上部安装有控制箱,控制箱内安装有开关电源、控制模块和电源模块,开关电源为用于市政隧道可拆解重复利用基坑支护设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;第一接触开关、第一距离传感器、数字霍尔传感器、第二距离传感器、第二接触开关、第一压力传感器和第二压力传感器均与控制模块通过电性连接,第一电动推杆、第二电动推杆、第三电动推杆、第四电动推杆和第五电动推杆均与控制模块通过继电器控制模块连接,双轴减速电机与控制模块通过直流电机正反转模块连接,第一指示灯和第二指示灯均与控制模块通过电性连接。
13.本发明提供了一种用于市政隧道可拆解重复利用基坑支护设备,具备以下有益效果:
14.1、本发明通过防滑钉向下运动到与地面接触后,使得防滑钉插入地面中,防滑钉对底座进行固定,从而防止底座翻倒,实现防滑钉固定底座效果;
15.2、当支护板向上运动到与隧道墙面接触后,支护架继续向上运动,支护架带动第一伸缩杆收缩,第一伸缩弹簧被压缩,支护板对隧道墙面进行固定,防止隧道墙面中的泥土松动而造成隧道的坍塌,实现支护板固定隧道墙面效果;
16.3、本发明通过筛板对石块和地下水进行筛分,使得石块遗留在筛板上,地下水通
过筛板掉落在排水槽中,地下水通过排水槽和导流管流落在地面上,从而防止石块堵住排水槽,实现筛板筛分石块效果;
17.4、当左侧的顶块向上运动到与左侧的筛板接触后,从而带动左侧的筛板向上运动,使得左侧的筛板对石块进行向上运送,使用者可对左侧的筛板上的石块进行清理,实现左侧的筛板运送石块效果。
附图说明
18.图1为本发明的第一视角立体结构示意图。
19.图2为本发明的第二视角立体结构示意图。
20.图3为本发明的第一部分立体结构示意图。
21.图4为本发明的第二部分立体结构示意图。
22.图5为本发明的缓冲机构立体结构示意图。
23.图6为本发明的a处放大图。
24.图7为本发明的防滑机构立体结构示意图。
25.图8为本发明的防滑机构剖视立体结构示意图。
26.图9为本发明的支护机构第一部分立体结构示意图。
27.图10为本发明的支护机构第二部分立体结构示意图。
28.图11为本发明的固定机构第一部分立体结构示意图。
29.图12为本发明的固定机构第二部分立体结构示意图。
30.图13为本发明的固定机构第三部分立体结构示意图。
31.图14为本发明的防堵机构立体结构示意图。
32.图15为本发明的b处放大图。
33.图16为本发明的除块机构第一部分立体结构示意图。
34.图17为本发明的c处放大图。
35.图18为本发明的除块机构第二部分立体结构示意图。
36.图19为本发明的d处放大图。
37.图20为本发明的电路框图。
38.图21为本发明的电路原理图。
39.附图中各零部件的标记如下:1、底座,2、支撑台,3、控制箱,31、第一接触开关,4、第一导向套,5、支护架,6、滑块,61、导向槽,7、支撑杆,8、第一限位块,9、第一支撑架,91、移动轮,10、缓冲机构,101、支护板,102、第一伸缩杆,103、第一伸缩弹簧,104、固定板,11、防滑机构,111、第二支撑架,112、第一电动推杆,113、第一连接板,114、防滑钉,115、第一距离传感器,12、支护机构,121、第二连接板,122、轴承座,123、丝杆,124、双轴减速电机,125、数字霍尔传感器,126、强磁铁,13、固定机构,131、第三支撑架,132、第二伸缩杆,133、第二弹簧,134、第二限位块,135、第二电动推杆,136、第二导向套,137、第二距离传感器,138、第三电动推杆,14、防堵机构,141、排水槽,142、筛板,143、导流管,144、第三伸缩杆,145、第三弹簧,15、除块机构,151、第二接触开关,152、第一指示灯,153、第二指示灯,154、第三导向套,155、顶块,156、第四电动推杆,157、第一压力传感器,158、第五电动推杆,159、第二压力传感器。
具体实施方式
40.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
41.请参阅图1
‑
图21,本发明提供一种技术方案:一种用于市政隧道可拆解重复利用基坑支护设备,包括有底座1、支撑台2、第一接触开关31、第一导向套4、支护架5、滑块6、导向槽61、支撑杆7、第一限位块8、第一支撑架9、移动轮91、缓冲机构10、防滑机构11、支护机构12和固定机构13,底座1上前侧左部焊接有支撑台2,支撑台2前侧下部安装有第一接触开关31,底座1上中部前后两侧均焊接有第一导向套4,两个第一导向套4顶部之间滑动式连接有支护架5,底座1上中部前后两侧均设有两个导向槽61,导向槽61与第一导向套4连接,四个导向槽61内侧均滑动式设有滑块6,四个滑块6上部均转动式设有支撑杆7,支撑杆7与支护架5配合,底座1上左右两侧均焊接有两个第一支撑架9,第一支撑架9与导向槽61连接,四个第一支撑架9上部均设有第一限位块8,第一限位块8与支撑杆7滑动式连接,底座1前后两侧均转动式设有两个移动轮91,支护架5上侧设有缓冲机构10,底座1上设有防滑机构11,底座1上设有支护机构12,两个第一导向套4之间设有固定机构13。
42.缓冲机构10包括有支护板101、第一伸缩杆102、第一伸缩弹簧103和固定板104,支护架5顶部设有多根第一伸缩杆102,纵向同侧的多根第一伸缩杆102顶端均连接有固定板104,多个固定板104顶部之间连接有支护板101,多根第一伸缩杆102上均绕有第一伸缩弹簧103,第一伸缩弹簧103两端分别与支护架5和固定板104连接。
43.防滑机构11包括有第二支撑架111、第一电动推杆112、第一连接板113、防滑钉114和第一距离传感器115,底座1上中部前后两侧均焊接有第二支撑架111,两个第二支撑架111前侧上部均通过螺栓固定安装有第一电动推杆112,两根第一电动推杆112的伸缩杆底端均连接有第一连接板113,两个第一连接板113底部左右两侧均焊接有多个防滑钉114,前侧的第二支撑架111上部前侧安装有第一距离传感器115。
44.支护机构12包括有第二连接板121、轴承座122、丝杆123、双轴减速电机124、数字霍尔传感器125和强磁铁126,底座1上中部左右两侧均焊接有轴承座122,底座1上中间通过螺栓固定安装有双轴减速电机124,双轴减速电机124输出轴左右两侧均连接有丝杆123,丝杆123与轴承座122连接,丝杆123左右两侧均螺纹式设有第二连接板121,第二连接板121前后两侧分别与同侧的滑块6连接,前部左侧的滑块6左部后侧安装有数字霍尔传感器125,前侧左部的导向槽61上设有强磁铁126。
45.固定机构13包括有第三支撑架131、第二伸缩杆132、第二弹簧133、第二限位块134、第二电动推杆135、第二导向套136、第二距离传感器137和第三电动推杆138,支护架5底部中间焊接有第三支撑架131,第三支撑架131前后两侧均设有多根第二伸缩杆132,横向同侧的多根第二伸缩杆132之间均连接有第二限位块134,第二限位块134与支撑杆7配合,多根第二伸缩杆132上均绕有第二弹簧133,第二弹簧133两端分别与第三支撑架131和第二限位块134连接,第三支撑架131顶部中间通过螺栓固定安装有第二电动推杆135,第二电动推杆135的伸缩杆与后侧的第二限位块134连接,第三支撑架131底部中间通过螺栓固定安装有第三电动推杆138,第三电动推杆138的伸缩杆与前侧的第二限位块134连接,第三支撑架131中部前后两侧均焊接有第二导向套136,第二导向套136与第二限位块134滑动式连
接,后侧的第一导向套4上部前侧中间安装有第二距离传感器137。
46.还包括有防堵机构14,防堵机构14包括有排水槽141、筛板142、导流管143、第三伸缩杆144和第三弹簧145,支护架5下部左右两侧均焊接有排水槽141,两个排水槽141内壁中部均滑动式设有筛板142,两个排水槽141与底座1之间均连接有导流管143,两个排水槽141内壁均设有多根第三伸缩杆144,第三伸缩杆144与筛板142连接,多根第三伸缩杆144上均绕有第三弹簧145,第三弹簧145两端分别与排水槽141和筛板142连接。
47.还包括有除块机构15,除块机构15包括有第二接触开关151、第一指示灯152、第二指示灯153、第三导向套154、顶块155、第四电动推杆156、第一压力传感器157、第五电动推杆158和第二压力传感器159,支撑台2前侧下部中间安装有第二接触开关151,支撑台2前侧下部左侧安装有第一指示灯152,支撑台2前侧下部右侧安装有第二指示灯153,第三支撑架131顶部左右两侧均焊接有第三导向套154,两个第三导向套154上均滑动式设有顶块155,顶块155与排水槽141滑动式连接,顶块155与筛板142配合,第三支撑架131顶部右侧通过螺栓固定安装有第四电动推杆156,第四电动推杆156的伸缩杆与右侧的顶块155连接,第四电动推杆156位于右侧的第三导向套154的右侧,右侧的排水槽141内壁中部安装有第一压力传感器157,第三支撑架131顶部左侧通过螺栓固定安装有第五电动推杆158,第五电动推杆158的伸缩杆与左侧的顶块155连接,左侧的排水槽141内壁中部安装有第二压力传感器159。
48.还包括有控制箱3,支撑台2前侧上部通过螺栓固定安装有控制箱3,控制箱3内安装有开关电源、控制模块和电源模块,开关电源为用于市政隧道可拆解重复利用基坑支护设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;第一接触开关31、第一距离传感器115、数字霍尔传感器125、第二距离传感器137、第二接触开关151、第一压力传感器157和第二压力传感器159均与控制模块通过电性连接,第一电动推杆112、第二电动推杆135、第三电动推杆138、第四电动推杆156和第五电动推杆158均与控制模块通过继电器控制模块连接,双轴减速电机124与控制模块通过直流电机正反转模块连接,第一指示灯152和第二指示灯153均与控制模块通过电性连接。
49.本发明的工作原理是,当人们想要对基坑进行支护时,可使用这种用于市政隧道可拆解重复利用基坑支护设备,首先,使用者按下电源总开关,将本设备上电,防滑机构11中设置有第一预设值和第二预设值,第一预设值的数值比第二预设值的数值大,固定机构13中设置有第一预设值和第二预设值,第一预设值的数值比第二预设值的数值小,本设备位于隧道外面后,使用者向后推动底座1,移动轮91与地面接触配合,从而带动移动轮91转动,移动轮91带动底座1、支撑台2、第一接触开关31、第一导向套4、支护架5、滑块6、导向槽61、支撑杆7、第一限位块8、第一支撑架9、缓冲机构10、防滑机构11、支护机构12和固定机构13向后运动,使得底座1移动进入隧道中,底座1向后运动到指定位置后,使用者停止推动底座1,移动轮91随之停止转动,随后使用者第一接触开关31,使得控制模块控制防滑机构11向下运动,防滑机构11向下运动到与地面接触后,使得防滑机构11插入地面中,防滑机构11对底座1进行固定,从而防止底座1翻倒,当防滑机构11向下运动的距离达到防滑机构11的第一预设值时,使得控制模块控制防滑机构11停止工作,与此同时,控制模块控制支护机构12向外侧运动,支护机构12带动滑块6向外侧运动,滑块6带动支撑杆7摆动,支撑杆7摆动到
与支护架5接触配合,从而带动支护架5向上运动,支护架5带动缓冲机构10向上运动,缓冲机构10向上运动到与隧道墙面接触后,缓冲机构10对隧道墙面进行支撑,防止隧道墙面中的泥土松动而造成隧道的坍塌,当支护机构12散发的磁力达到支护机构12的预设值时,使得控制模块控制支护机构12停止工作,与此同时,控制模块控制固定机构13向外侧运动,固定机构13向外侧运动到与支撑杆7接触后,固定机构13对支撑杆7进行固定,防止支撑杆7在隧道作业的过程中发生摆动而导致支护板101发生位置偏移,当固定机构13的距离达到固定机构13的第一预设值时,使得控制模块控制固定机构13停止工作,隧道作业完成后,使用者再次按下第一接触开关31,控制模块控制固定机构13向内侧运动,固定机构13向内侧运动远离支撑杆7,当固定机构13的距离达到固定机构13的第二预设值时,使得控制模块控制固定机构13停止工作,与此同时,使得控制模块控制支护机构12向内侧运动,支护机构12带动滑块6向内侧运动,滑块6带动支撑杆7反向摆动,支撑杆7带动支护架5和缓冲机构10向下运动,当支护机构12散发的磁力小于支护机构12的预设值时,使得控制模块控制支护机构12停止工作,与此同时,使得控制模块控制防滑机构11向上运动,防滑机构11向上运动脱离地面,当防滑机构11的距离达到防滑机构11的第二预设值时,使得控制模块控制防滑机构11停止工作,使用者再次按下电源总开关,将本设备断电。
50.当支护架5向上运动时,支护架5带动支护板101、第一伸缩杆102、第一伸缩弹簧103和固定板104向上运动,支护板101向上运动到与隧道墙面接触后,支护架5继续向上运动,支护架5带动第一伸缩杆102收缩,第一伸缩弹簧103被压缩,支护板101对隧道墙面进行固定,防止隧道墙面中的泥土松动而造成隧道的坍塌,隧道作业完成后,当支护架5向下运动时,支护架5带动第一伸缩杆102伸长,第一伸缩弹簧103复位,支护架5带动支护板101、第一伸缩杆102、第一伸缩弹簧103和固定板104向下运动到恢复原位。
51.第一距离传感器115中设置有第一预设值和第二预设值,第一预设值的数值比第二预设值的数值大,底座1移动到指定位置后,使用者按下第一接触开关31,使得控制模块控制第一电动推杆112的伸缩杆向下伸长,第一电动推杆112的伸缩杆带动第一连接板113和防滑钉114向下运动,防滑钉114向下运动到与地面接触后,使得防滑钉114插入地面中,防滑钉114对底座1进行固定,从而防止底座1翻倒,当第一连接板113与第一距离传感器115之间的距离达到第一距离传感器115的第一预设值时,使得控制模块控制第一电动推杆112停止工作,隧道作业完成后,当支护机构12散发的磁力小于支护机构12的预设值时,使得控制模块控制第一电动推杆112的伸缩杆向上缩短,第一电动推杆112的伸缩杆带动第一连接板113和防滑钉114向上运动,使得防滑钉114向上运动脱离地面,当第一连接板113与第一距离传感器115之间的距离达到第一距离传感器115的第二预设值时,使得控制模块控制第一电动推杆112停止工作。
52.当第一连接板113与第一距离传感器115之间的距离达到第一距离传感器115的第一预设值时,使得控制模块控制双轴减速电机124工作,双轴减速电机124输出轴带动丝杆123转动,丝杆123带动第二连接板121向外侧运动,第二连接板121带动滑块6向外侧运动,前部左侧的滑块6带动数字霍尔传感器125向左运动,滑块6带动支撑杆7摆动,支撑杆7摆动到与支护架5接触配合,从而带动支护架5向上运动,使得支护板101向上运动到与隧道墙面接触后,支护板101对隧道墙面进行支撑,数字霍尔传感器125向左运动靠近强磁铁126,当强磁铁126散发的磁力达到数字霍尔传感器125的预设值时,使得控制模块控制双轴减速电
机124停止工作,隧道作业完成后,当固定机构13的距离达到固定机构13的第二预设值时,使得控制模块控制双轴减速电机124工作,双轴减速电机124输出轴带动丝杆123反向转动,丝杆123带动第二连接板121向内侧运动,第二连接板121带动滑块6向内侧运动,前部左侧的滑块6带动数字霍尔传感器125向右运动,滑块6带动支撑杆7反向摆动,支撑杆7带动第一限位块8和支护架5向下运动,数字霍尔传感器125向右运动远离强磁铁126,当强磁铁126散发的磁力小于数字霍尔传感器125的预设值时,使得控制模块控制双轴减速电机124停止工作。
53.第二距离传感器137中设置有第一预设值和第二预设值,第一预设值的数值比第二预设值的数值小,支撑杆7处于竖直状态时,当强磁铁126散发的磁力达到数字霍尔传感器125的预设值时,使得控制模块控制第二电动推杆135和第三电动推杆138工作,第二电动推杆135的伸缩杆向后伸长,第三电动推杆138的伸缩杆向前伸长,第二电动推杆135的伸缩杆和第三电动推杆138的伸缩杆带动第二限位块134向外侧运动,第二限位块134带动第二伸缩杆132伸长,第二弹簧133被拉伸,第二限位块134向外侧运动到与支撑杆7接触后,第二限位块134对支撑杆7进行固定,防止支撑杆7在隧道作业的过程中发生摆动而导致支护板101发生位置偏移,当后侧的第二限位块134与第二距离传感器137的距离达到第二距离传感器137的第一预设值时,使得控制模块控制第二电动推杆135和第三电动推杆138停止工作,隧道作业完成后,使用者再次按下第一接触开关31,使得控制模块控制第二电动推杆135和第三电动推杆138工作,第二电动推杆135的伸缩杆向前缩短,第三电动推杆138的伸缩杆向后缩短,第二电动推杆135的伸缩杆和第三电动推杆138的伸缩杆带动第二限位块134向内侧运动,第二限位块134带动第二伸缩杆132收缩,第二弹簧133复位,使得第二限位块134向内侧运动远离支撑杆7,当后侧的第二限位块134与第二距离传感器137的距离达到第二距离传感器137的第二预设值时,使得控制模块控制第二电动推杆135和第三电动推杆138停止工作。
54.隧道中的石块和地下水会掉落在支护板101上,石块和地下水会顺着支护板101掉落在筛板142上,筛板142对石块和地下水进行筛分,使得石块遗留在筛板142上,地下水通过筛板142掉落在排水槽141中,地下水通过排水槽141和导流管143流落在地面上,从而防止石块堵住排水槽141,受到石块自身重量的影响,从而带动筛板142向下运动,筛板142带动第三伸缩杆144收缩,第三弹簧145被压缩,隧道作业完成后,使用者将筛板142上的石块进行清理,石块脱离筛板142后,第三弹簧145复位,从而带动筛板142向上运动,筛板142带动第三伸缩杆144伸长。
55.当筛板142向下运动时,当左侧的筛板142向下运动到与第二压力传感器159接触后,当左侧的筛板142产生的压力达到第二压力传感器159的预设值时,使得控制模块控制第一指示灯152发出亮光,与此同时,控制模块控制第五电动推杆158的伸缩杆向上伸长两秒钟后关闭,第五电动推杆158的伸缩杆带动左侧的顶块155向上运动,左侧的顶块155向上运动到与左侧的筛板142接触后,从而带动左侧的筛板142向上运动,使得左侧的筛板142对石块进行向上运送,使用者可对左侧的筛板142上的石块进行清理,石块清理完成后,使用者按下第二接触开关151,使得控制模块控制第五电动推杆158的伸缩杆向下缩短两秒钟后关闭,与此同时,控制模块控制第一指示灯152停止发出亮光,第五电动推杆158的伸缩杆带动左侧的顶块155向下运动到恢复原位,当右侧的筛板142向下运动到与第一压力传感器
157接触后,当右侧的筛板142产生的压力达到第一压力传感器157的预设值时,使得控制模块控制第二指示灯153发出亮光,与此同时,控制模块控制第四电动推杆156的伸缩杆向上伸长两秒钟后关闭,第四电动推杆156的伸缩杆带动右侧的顶块155向上运动,右侧的顶块155向上运动到与右侧的筛板142接触后,从而带动右侧的筛板142向上运动,使得右侧的筛板142对石块进行向上运送,使用者可对右侧的筛板142上的石块进行清理,石块清理完成后,使用者按下第二接触开关151,使得控制模块控制第四电动推杆156的伸缩杆向下缩短两秒钟后关闭,与此同时,控制模块控制第二指示灯153停止发出亮光,第四电动推杆156的伸缩杆带动右侧的顶块155向下运动到恢复原位。
56.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。