1.本发明属于屏乒乓球机器人相关技术领域,具体涉及乒乓球机器人的乒乓球尺寸调节机构。
背景技术:
2.乒乓球从球桌的这头到那头,时间不到一秒,要成功回球,运动员凭的是经验和直觉,靠的却是一套复杂的识别系统、定位系统、计算系统和控制系统,对手击球的瞬间,机器人对面的摄像机以每秒一百二十幅图像的速度捕捉球的运动轨迹,并在瞬间把信息回传给机器人的眼睛,通过大脑的快速处理,机器人在瞬间就完成了对球的位置、速度、角度、运动轨迹和落点的计算,并计算出最优的应对路线和最佳回球姿势,整个反应时间在五十到一百毫秒之间。
3.现有的乒乓球机器人技术存在以下问题:现有的乒乓球机器人,可在日常训练中担任重要的角色,乒乓球可根据球的轨迹进行回击,通过长时间的训练,可大幅度提高运动员的反应速度,现有的乒乓球在进行发球时,口径无法调节,进而导致机器人发球功能单一的问题。
技术实现要素:
4.本发明的目的在于提供乒乓球机器人的乒乓球尺寸调节机构,以解决上述背景技术中提出现有的乒乓球机器人,可在日常训练中担任重要的角色,乒乓球可根据球的轨迹进行回击,通过长时间的训练,可大幅度提高运动员的反应速度,现有的乒乓球在进行发球时,口径无法调节,进而导致机器人发球功能单一的问题。
5.为实现上述目的,本发明提供如下技术方案:乒乓球机器人的乒乓球尺寸调节机构,包括固定板和连接杆,所述固定板的顶端在位于左右两侧位置处设置有连接杆,所述连接杆通过螺丝栓接于固定板处,所述固定板的顶侧位置处设置有压板,所述压板通过螺丝栓接于连接杆处,所述压板的顶端位置处设置有立柱,所述立柱通过焊接固定于压板处,所述立柱的前端在位于下方位置处设置有旋钮二,所述旋钮二与电源电性连接,所述旋钮二的上方位置处设置有旋钮一,所述旋钮一与电源电性连接,所述立柱的顶端位置处设置有壳体,所述壳体通过焊接固定于立柱处,所述壳体的底端位置处设置有驱动电机一,所述驱动电机一通过螺丝栓接于壳体处,所述壳体的前端在位于中间位置处设置有出口端,所述出口端通过螺丝栓接于壳体处,所述壳体的前端在位于右上角位置处设置有驱动电机二,所述驱动电机二通过螺丝栓接于壳体处,所述驱动电机二的左端在位于上方位置处设置有防护壳,所述防护壳通过螺丝栓接于驱动电机二处,所述驱动电机二的左端在位于中间位置处设置有软棒模块,所述软棒模块套接至驱动电机二处,所述软棒模块包括摩擦棒、固定杆、联轴器、槽口板,所述驱动电机二的左端在位于中间位置处设置有固定杆,所述固定杆的底端在位于左侧位置处设置有联轴器,所述联轴器一体成型于固定杆处,所述联轴器的中间位置处设置有槽口板,所述槽口板通过
螺丝栓接于联轴器处,所述槽口板的左端位置处设置有摩擦棒,所述摩擦棒横向套接至槽口板处,所述壳体的顶端位置处设置有接口端,所述接口端一体成型于壳体处,所述接口端的顶端位置处设置有开口容器,所述开口容器竖向套接至接口端处。
6.优选的,所述固定板的边缘经过钝化打磨处理,所述固定板可完全贴合于球桌处,所述固定板的表面经过防腐蚀处理,所述固定板与压板呈横向平行设置。
7.优选的,所述固定板可在外力作用下相对于压板进行位置移动,所述固定板的上方螺母逆时针转动固定板可在外力作用下逐渐靠近压板处,所述固定板的下方螺母顺时针转动时固定板可在外力作用下逐渐远离压板处。
8.优选的,所述固定板和压板的顶端在位于左右两侧位置处设置有圆孔,所述固定板和压板的圆孔位于同一竖直面,所述固定板与压板的圆孔直径一致。
9.优选的,所述旋钮二为圆形设置,所述旋钮二的表面设置有棱边,所述旋钮二可在外力作用下进行圆周转动。
10.优选的,所述连接杆的截面为圆形设置,所述连接杆的表面经过抛光打磨处理,所述连接杆的表面经过防腐蚀处理,所述连接杆与固定板和压板的连接处呈九十度直角设置。
11.优选的,所述立柱的表面经过防腐蚀处理,所述立柱与压板的连接处呈九十度直角设置,所述立柱与壳体的连接处呈九十度直角设置。
12.优选的,所述旋钮一为圆形设置,所述旋钮一的表面经过防腐蚀处理,所述旋钮一可在外力作用下进行圆周转动。
13.优选的,所述驱动电机一为三相电源接线设置,所述驱动电机一可在外力作用下进行圆周转动。
14.优选的,所述壳体的表面经过防腐蚀处理,所述壳体的边缘经过钝化打磨处理,所述壳体与接口端的连接处呈九十度直角设置。
15.优选的,所述软棒模块的表面可在外力作用下发生弹性形变,所述软棒模块为圆柱形设置,所述软棒模块可在外力作用下进行圆周运动。
16.优选的,所述摩擦棒的直径大于槽口板的直径,所述槽口板可在外力作用下相对于联轴器进行上下移动,所述联轴器与固定杆的连接处呈九十度直角设置。
17.优选的,所述固定杆可在外力作用下进行圆周转动,所述联轴器相对于固定杆进行圆周转动,所述槽口板相对于联轴器进行圆周转动,所述摩擦棒相对于槽口板进行圆周转动。
18.优选的,所述固定杆的表面经过防腐蚀处理,所述联轴器的表面经过防腐蚀处理,所述槽口板的表面经过防腐蚀处理。
19.与现有技术相比,本发明提供了乒乓球机器人的乒乓球尺寸调节机构,具备以下有益效果:1.本发明采用了可调节软棒模块,软棒模块分为四部分,分别为摩擦棒、固定杆、联轴器、槽口板,摩擦棒的直径大于槽口板的直径,槽口板可在外力作用下相对于联轴器进行上下移动,通过该设计可使用不同直径的乒乓球进行训练,联轴器与固定杆的连接处呈九十度直角设置,固定杆可在外力作用下进行圆周转动,联轴器相对于固定杆进行圆周转动,槽口板相对于联轴器进行圆周转动,摩擦棒相对于槽口板进行圆周转动,通过该结构设
计可确保运动的一致性,可大幅度调高设备的连续性及稳定性,固定杆的表面经过防腐蚀处理,可大幅度提高其使用期限,联轴器的表面经过防腐蚀处理,槽口板的表面经过防腐蚀处理,现有的设备无法进行调节位置,进而导致设备使用受限,该设置通过槽板板的连接,便于调节上下位置,进而使设备的实用性增加,相对于现有的设备,该设置可大幅度提高设备的实际运用,且该新结构设计安装便捷,便于后期进行调节;2.本发明采用了可调节软棒模块,软棒模块与驱动电机二进行连接,现有的设备进行连接时,软棒模块通过联轴器与驱动电机二进行连接,驱动电机二进行转动时,软棒模块相对于驱动电机二进行圆周转动,无法进行上下调节,采用可调节软棒模块,联轴器的一端与驱动电机二进行连接,另一端设置有槽口版,且槽口板与联轴器为一体结构设置,通过该设置可确保设备的稳定性,在进行运行时不发生运动颤抖,有效且连续,固定杆通过穿插于槽口板的凹槽处,通过螺丝进行栓接,该连接方式简单且易操作,在安装时通过扳手进行固定,不同直径的乒乓球,相对于槽口板的凹槽进行上下调节,确定位置后,进行固定,通过该设置可大幅度提高设备的实用性。
附图说明
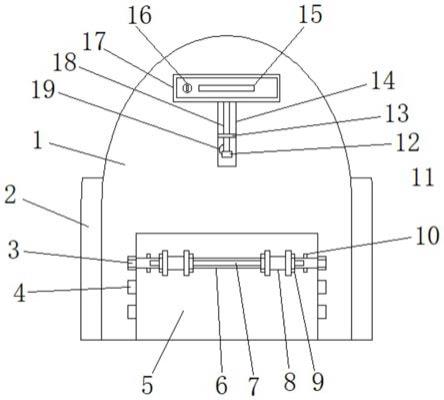
20.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:图1为本发明提出的乒乓球机器人的乒乓球尺寸调节机构整体结构示意图;图2为本发明提出的乒乓球机器人的乒乓球尺寸调节机构分体结构示意图;图3为本发明提出的乒乓球机器人的乒乓球尺寸调节机构软棒模块结构示意图;图4为本发明提出的乒乓球机器人的乒乓球尺寸调节机构连接模块结构示意图;图中:1、固定板;2、压板;3、连接杆;4、驱动电机一;5、壳体;6、接口端;7、开口容器;8、防护壳;9、软棒模块;10、驱动电机二;11、出口端;12、旋钮一;13、立柱;14、旋钮二;91、摩擦棒;92、固定杆;93、联轴器;94、槽口板。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.请参阅图1
‑
4,本发明提供一种技术方案:乒乓球机器人的乒乓球尺寸调节机构,包括固定板1和连接杆3,固定板1的顶端在位于左右两侧位置处设置有连接杆3,连接杆3通过螺丝栓接于固定板1处,连接杆3的截面为圆形设置,连接杆3的表面经过抛光打磨处理,连接杆3的表面经过防腐蚀处理,连接杆3与固定板1和压板2的连接处呈九十度直角设置,固定板1的边缘经过钝化打磨处理,固定板1可完全贴合于球桌处,固定板1的表面经过防腐蚀处理,固定板1与压板2呈横向平行设置,固定板1的顶侧位置处设置有压板2,压板2通过螺丝栓接于连接杆3处,固定板1可在外力作用下相对于压板2进行位置移动,固定板1的上方螺母逆时针转动固定板1可在外力作用下逐渐靠近压板2处,固定板1的下方螺母顺时针转动时固定板1可在外力作用下逐渐远离压
板2处,固定板1和压板2的顶端在位于左右两侧位置处设置有圆孔,固定板1和压板2的圆孔位于同一竖直面,固定板1与压板2的圆孔直径一致,压板2的顶端位置处设置有立柱13,立柱13通过焊接固定于压板2处,立柱13的前端在位于下方位置处设置有旋钮二14,旋钮二14与电源电性连接,旋钮二14为圆形设置,旋钮二14的表面设置有棱边,旋钮二14可在外力作用下进行圆周转动,旋钮二14的上方位置处设置有旋钮一12,旋钮一12与电源电性连接,旋钮一12为圆形设置,旋钮一12的表面经过防腐蚀处理,旋钮一12可在外力作用下进行圆周转动,该设置通过固定板1和压板2的挤压,可将该设备稳定固定于球桌处。
23.乒乓球机器人的乒乓球尺寸调节机构,包括立柱13的顶端位置处设置有壳体5,壳体5通过焊接固定于立柱13处,立柱13的表面经过防腐蚀处理,立柱13与压板2的连接处呈九十度直角设置,立柱13与壳体5的连接处呈九十度直角设置,壳体5的底端位置处设置有驱动电机一4,驱动电机一4通过螺丝栓接于壳体5处,壳体5的表面经过防腐蚀处理,壳体5的边缘经过钝化打磨处理,壳体5与接口端6的连接处呈九十度直角设置,驱动电机一4为三相电源接线设置,驱动电机一4可在外力作用下进行圆周转动,壳体5的前端在位于中间位置处设置有出口端11,出口端11通过螺丝栓接于壳体5处,壳体5的前端在位于右上角位置处设置有驱动电机二10,驱动电机二10通过螺丝栓接于壳体5处,驱动电机二10的左端在位于上方位置处设置有防护壳8,防护壳8通过螺丝栓接于驱动电机二10处,该设置通过驱动电机二10的转动作用,可使软棒模块9进行圆周转动。
24.乒乓球机器人的乒乓球尺寸调节机构,包括驱动电机二10的左端在位于中间位置处设置有软棒模块9,软棒模块9套接至驱动电机二10处,软棒模块9的表面可在外力作用下发生弹性形变,软棒模块9为圆柱形设置,软棒模块9可在外力作用下进行圆周运动,软棒模块9包括摩擦棒91、固定杆92、联轴器93、槽口板94,驱动电机二10的左端在位于中间位置处设置有固定杆92,固定杆92的底端在位于左侧位置处设置有联轴器93,联轴器93一体成型于固定杆92处,联轴器93的中间位置处设置有槽口板94,槽口板94通过螺丝栓接于联轴器93处,槽口板94的左端位置处设置有摩擦棒91,摩擦棒91横向套接至槽口板94处,摩擦棒91的直径大于槽口板94的直径,槽口板94可在外力作用下相对于联轴器93进行上下移动,联轴器93与固定杆92的连接处呈九十度直角设置,固定杆92可在外力作用下进行圆周转动,联轴器93相对于固定杆92进行圆周转动,槽口板94相对于联轴器93进行圆周转动,摩擦棒91相对于槽口板94进行圆周转动,固定杆92的表面经过防腐蚀处理,联轴器93的表面经过防腐蚀处理,槽口板94的表面经过防腐蚀处理,壳体5的顶端位置处设置有接口端6,接口端6一体成型于壳体5处,接口端6的顶端位置处设置有开口容器7,开口容器7竖向套接至接口端6处,该设置通过软棒模块9的上下调节性,可进行使用不同直径的乒乓球。
25.本发明的工作原理及使用流程:本发明安装好过后,将乒乓球倒入开口容器7处,在重力作用下,乒乓球进入开口容器7底端的圆管处,通过接口端6进入壳体5处,接通电源,驱动电机一4进行转动,带动乒乓球快速进入设备内部,滚动至出口端11,驱动电机二10进行圆周转动,软棒模块9进行圆周转动,带动乒乓球向前发射,进而使乒乓球快速飞出,软棒模块9可进行上下调节,从而适用于不同直径的球体,软棒模块9分为四部分,分别为摩擦棒91、固定杆92、联轴器93、槽口板94,摩擦棒91的直径大于槽口板94的直径,摩擦棒91可在外力作用下进行弹性形变,且摩擦因素较大,通过摩擦力的作用将乒乓球弹出,槽口板94可在外力作用下相对于联轴器93进行上下移动,通过该结构设计,便于调整位置,联轴器93与固
定杆92的连接处呈九十度直角设置,固定杆92可在外力作用下进行圆周转动,联轴器93相对于固定杆92进行圆周转动,槽口板94相对于联轴器93进行圆周转动,摩擦棒91相对于槽口板94进行圆周转动,固定杆92的表面经过防腐蚀处理,联轴器93的表面经过防腐蚀处理,槽口板94的表面经过防腐蚀处理,可大幅度提高其使用期限,联轴器93与驱动电机二10相连接,进行圆周转动,固定杆92可在外力作用下相对于槽口板94进行上下调节,具体操作通过转动固定螺丝进行调节,进行确定位置,适用不同直径的乒乓球。
26.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。