1.本发明涉及智能机器人技术领域,尤其涉及一种带有巡查底座的智能巡查机器人及巡查方法。
背景技术:
2.目前随着社会的发展,机器人在人们生活中的应用越来越广泛,为了提高人们的安全性,逐渐采用智能巡查机器人代替人工去对环境中的安全卫生进行巡查。
3.但现有的巡查机器人大多不具有减震装置,当巡查机器人受到碰撞时不能对巡查机器人进行保护,从而增加了巡查机器人在受到碰撞时的损坏风险。
4.
技术实现要素:
5.本发明的目的在于提供一种能在巡查机器人受到碰撞时对巡查机器人进行保护的带有巡查底座的智能巡查机器人及巡查方法。
6.为实现上述目的,本发明提供了一种带有巡查底座的智能巡查机器人,包括连接座、摄像头和安装组件;所述摄像头与所述连接座转动连接,并位于所述连接座的一侧;所述安装组件包括底座、导向构件、转向构件、连接构件、驱动构件和执行构件,所述导向构件与所述连接座固定连接,所述底座与所述导向构件固定连接,并位于所述导向构件远离所述连接座的一侧,所述转向构件与所述连接座转动连接,所述连接构件与所述底座固定连接,所述驱动构件与所述底座转动连接;所述执行构件包括弹簧和支撑板,所述弹簧与所述底座固定连接,并位于所述底座远离所述连接座的一侧,所述支撑板与所述弹簧固定连接,并位于所述弹簧远离所述底座的一侧。
7.通过所述弹簧对所述底座受到的碰撞力的缓冲,从而降低了巡查机器人在受到碰撞时的损坏风险。
8.其中,所述导向构件包括伸缩杆和液压缸,所述伸缩杆与所述连接座固定连接,并位于所述连接座靠近所述底座的一侧;所述液压缸与所述伸缩杆固定连接,并与所述底座固定连接,且位于所述伸缩杆与所述底座之间。
9.通过所述液压缸的输出端输出的动力来带动所述伸缩杆进行伸缩,从而使得所述连接座在所述底座上进行竖向移动,进而可调节所述摄像头的高度。
10.其中,所述转向构件包括控制电机和转轴,所述控制电机与所述连接座固定连接,并位于所述连接座远离所述底座的一侧;所述转轴与所述控制电机转动连接,并位于所述控制电机远离所述连接座的一侧。
11.通过设置所述控制电机,从而使得所述控制电机的输出端输出的动力来带动所述转轴进行转动。
12.其中,所述转向构件还包括转动板,所述转动板与所述转轴固定连接,并与所述摄像头固定连接,且位于所述摄像头靠近所述转轴的一侧。
13.通过所述转轴的转动,从而使得所述转动板进行转动,进而使得所述摄像头进行转动。
14.其中,所述连接构件包括避障传感器和控制器,所述避障传感器与所述支撑板固定连接,并位于所述支撑板远离所述弹簧的一侧;所述控制器与所述底座固定连接,并与所述避障传感器电连接,且位于所述底座靠近所述连接座的一侧。
15.通过所述避障传感器对前方区域进行检测,并将检测结果传输给所述控制器,从而使得当前方区域存在障碍物时,所述控制器控制巡查机器人进行转向。
16.其中,所述连接构件还包括电源,所述电源与所述底座固定连接,并与所述控制器电连接,且位于所述底座靠近所述控制器的一侧。
17.通过设置所述电源,从而使得所述电源可为所述控制器进行供电。
18.其中,所述连接构件还包括报警器,所述报警器与所述连接座固定连接,并与所述控制器电连接,且位于所述连接座远离所述控制器的一侧。
19.当所述摄像头获取的图像存在异常情况时,所述控制器控制所述报警器进行运行,从而使得所述报警器发出警报声,进而可提醒人们前方存在安全隐患。
20.本发明采用的一种带有巡查底座的智能巡查机器人的巡查方法,包括如下步骤:利用摄像头获取巡检区域的图像数据;将获取的所述图像数据传输到控制器;将获取的所述图像数据与正常的图像数据进行比对,所述图像数据正常,正常发送所述图像数据到计算机上进行显示,所述图像数据异常,所述控制器控制报警器进行报警。
21.通过所述摄像头对巡检区域进行摄像,将获取到的图像数据与存储的正常的图像数据进行比对,当存在异常时,计算机发出报警信号并将报警信号传输给所述控制器,通过所述控制器来控制所述报警器进行报警。
22.本发明的一种带有巡查底座的智能巡查机器人及巡查方法,通过所述摄像头在所述连接座上转动,从而使得所述摄像头的摄像角度可进行调节,通过所述摄像头对巡查区域进行摄像,从而使得所述摄像头获取的图像可与正常情况下的图像进行比对,进而可知道巡查区域是否存在异常的安全的问题,通过所述支撑板受到碰撞时产生的朝向所述底座的挤压力,从而使得所述弹簧进行收缩,由于所述弹簧具有自动恢复作用,从而使得所述弹簧在挤压力逐渐消失时会逐渐恢复到原位,进而使得所述弹簧可对所述底座受到的来自所述支撑板的碰撞力进行缓冲,通过所述弹簧对所述底座受到的碰撞力的缓冲,从而降低了巡查机器人在受到碰撞时的损坏风险。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
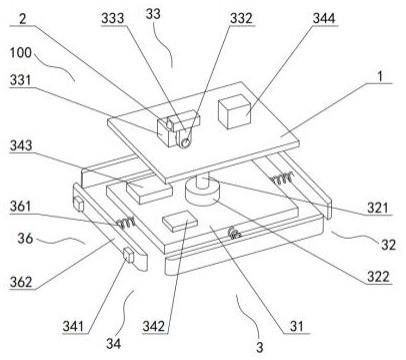
24.图1是本发明提供的控制器安装在底座的结构示意图。
25.图2是本发明提供的报警器安装在连接座的结构示意图。
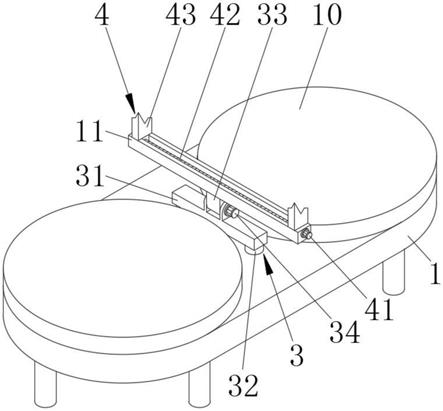
26.图3是本发明提供的转向滑轮与转向杆的连接示意图。
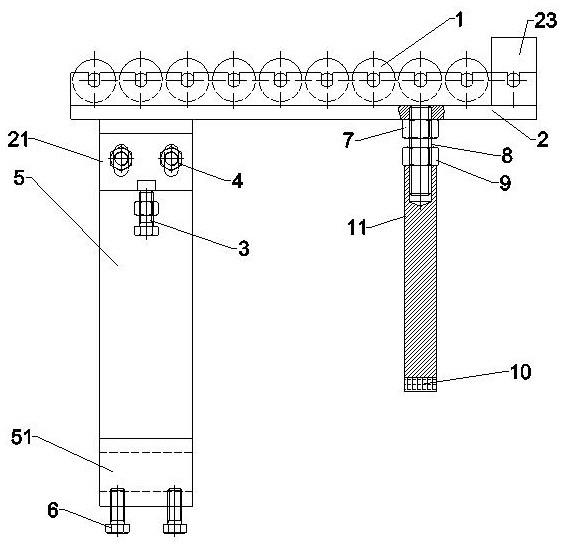
27.图4是本发明提供的转轴与转动板的连接示意图。
28.图5是本发明提供的带有巡查底座的智能巡查机器人的巡查方法的流程图。
29.图中:1
‑
连接座、2
‑
摄像头、3
‑
安装组件、31
‑
底座、32
‑
导向构件、33
‑
转向构件、34
‑
连接构件、35
‑
驱动构件、36
‑
执行构件、100
‑
带有巡查底座的智能巡查机器人、321
‑
伸缩杆、322
‑
液压缸、331
‑
控制电机、332
‑
转轴、333
‑
转动板、341
‑
避障传感器、342
‑
控制器、343
‑
电源、344
‑
报警器、351
‑
驱动电机、352
‑
转向杆、353
‑
转向滑轮、361
‑
弹簧、362
‑
支撑板。
具体实施方式
30.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
31.请参阅图1至图4,本发明提供一种带有巡查底座的智能巡查机器人100,包括连接座1、摄像头2和安装组件3;所述摄像头2与所述连接座1转动连接,并位于所述连接座1的一侧;所述安装组件3包括底座31、导向构件32、转向构件33、连接构件34、驱动构件35和执行构件36,所述导向构件32与所述连接座1固定连接,所述底座31与所述导向构件32固定连接,并位于所述导向构件32远离所述连接座1的一侧,所述转向构件33与所述连接座1转动连接,所述连接构件34与所述底座31固定连接,所述驱动构件35与所述底座31转动连接;所述执行构件36包括弹簧361和支撑板362,所述弹簧361与所述底座31固定连接,并位于所述底座31远离所述连接座1的一侧,所述支撑板362与所述弹簧361固定连接,并位于所述弹簧361远离所述底座31的一侧。
32.在本实施方式中,所述摄像头2与所述连接座1转动连接,所述底座31与所述连接座1通过所述导向构件32实现固定连接,所述弹簧361与所述底座31固定连接,所述弹簧361的数量为四个,并分别位于所述底座31的四个侧面,所述支撑板362与所述弹簧361固定连接,所述支撑板362的数量为四个,每个所述弹簧361与所述支撑板362构成一组,并每组分别位于所述底座31的四个侧面上,当所述支撑板362受到碰撞时,所述支撑板362产生朝向所述底座31的挤压力,从而使得所述弹簧361进行收缩,如此,通过所述摄像头2在所述连接座1上进行转动,从而使得所述摄像头2的摄像角度可进行调节,通过所述摄像头2对巡查区域进行摄像,从而使得所述摄像头2获取的图像可与正常情况下的图像进行比对,进而可知道巡查区域是否存在异常的安全的问题,通过所述支撑板362受到碰撞时产生的朝向所述底座31的挤压力,从而使得所述弹簧361进行收缩,由于所述弹簧361具有自动恢复作用,从而使得所述弹簧361在挤压力逐渐消失时会逐渐恢复到原位置,进而使得所述弹簧361可对所述底座31受到的来自所述支撑板362的碰撞力进行缓冲,通过所述弹簧361对所述底座31受到的碰撞力的缓冲,从而降低了巡查机器人在受到碰撞时的损坏风险。
33.进一步的,请参阅图1、图2和图4,所述导向构件32包括伸缩杆321和液压缸322,所述伸缩杆321与所述连接座1固定连接,并位于所述连接座1靠近所述底座31的一侧;所述液压缸322与所述伸缩杆321固定连接,并与所述底座31固定连接,且位于所述伸缩杆321与所述底座31之间。
34.在本实施方式中,所述伸缩杆321与所述连接座1固定连接,所述液压缸322与所述
伸缩杆321固定连接,并与所述底座31固定连接,通过所述液压缸322的输出端输出的动力来带动所述伸缩杆321进行伸缩,从而使得所述连接座1在所述底座31上进行竖向移动,进而可调节所述摄像头2的高度。
35.进一步的,请参阅图1、图2和图4,所述转向构件33包括控制电机331和转轴332,所述控制电机331与所述连接座1固定连接,并位于所述连接座1远离所述底座31的一侧;所述转轴332与所述控制电机331转动连接,并位于所述控制电机331远离所述连接座1的一侧。
36.进一步的,请参阅图1、图2和图4,所述转向构件33还包括转动板333,所述转动板333与所述转轴332固定连接,并与所述摄像头2固定连接,且位于所述摄像头2靠近所述转轴332的一侧。
37.在本实施方式中,所述控制电机331与所述连接座1固定连接,所述转轴332与所述控制电机331转动连接,所述转动板333与所述转轴332固定连接,并与所述摄像头2固定连接,通过所述控制电机331的输出端输出的动力来带动所述转轴332进行转动,从而使得所述转动板333进行转动,进而使得所述摄像头2进行转动。
38.进一步的,请参阅图1至图3,所述连接构件34包括避障传感器341和控制器342,所述避障传感器341与所述支撑板362固定连接,并位于所述支撑板362远离所述弹簧361的一侧;所述控制器342与所述底座31固定连接,并与所述避障传感器341电连接,且位于所述底座31靠近所述连接座1的一侧。
39.进一步的,请参阅图1至图3,所述连接构件34还包括电源343,所述电源343与所述底座31固定连接,并与所述控制器342电连接,且位于所述底座31靠近所述控制器342的一侧。
40.进一步的,请参阅图1、图2和图4,所述连接构件34还包括报警器344,所述报警器344与所述连接座1固定连接,并与所述控制器342电连接,且位于所述连接座1远离所述控制器342的一侧。
41.在本实施方式中,所述避障传感器341与所述支撑板362固定连接,所述避障传感器341的型号为ce30
‑
a,所述控制器342与所述底座31固定连接,并与所述避障传感器341电连接,所述控制器342的型号为dvp20sx211t,通过所述避障传感器341对前方区域进行检测,并将检测结果传输给所述控制器342,从而使得当前方区域存在障碍物时,所述控制器342控制巡查机器人进行转向,进而实现了对前方区域的障碍物进行避让,所述电源343与所述底座31固定连接,并与所述控制器342电连接,通过设置所述电源343,从而使得所述电源343可为所述控制器342进行供电,所述报警器344与所述连接座1固定连接,并与所述控制器342电连接,当所述摄像头2获取的图像存在异常情况时,所述控制器342控制所述报警器344运行,从而使得所述报警器344发出警报声,进而可提醒人们前方存在安全隐患。
42.进一步的,请参阅图3,所述驱动构件35包括驱动电机351和转向杆352,所述驱动电机351与所述底座31转动连接,并与所述控制器342电连接,且位于所述底座31远离所述连接座1的一侧;所述转向杆352与所述驱动电机351转动连接,并位于所述驱动电机351远离所述底座31的一侧。
43.进一步的,请参阅图3,所述驱动构件35还包括转向滑轮353,所述转向滑轮353与所述转向杆352转动连接,并位于所述转向杆352远离所述驱动电机351的一侧。
44.在本实施方式中,所述驱动电机351与所述底座31转动连接,并与所述控制器342
电连接,所述转向杆352与所述驱动电机351转动连接,所述转向滑轮353与所述转向杆352转动连接,当所述摄像头2获取的图像存在异常情况时,所述控制器342控制所述驱动电机351停止转动,从而使得所述转向杆352停止转动,进而使得所述转向滑轮353停止转动,通过所述驱动电机351与所述转向滑轮353停止转动,使得所述底座31停止移动,从而可实现巡查机器人的制动,进而便于操作人员获取发生异常的具体位置而进行检修。
45.请参阅图5,一种带有巡查底座的智能巡查机器人的巡查方法,包括如下步骤:s101:利用摄像头2获取巡检区域的图像数据;s102:将获取的所述图像数据传输到控制器342;s103:将获取的所述图像数据与正常的图像数据进行比对,所述图像数据正常,正常发送所述图像数据到计算机上进行显示,所述图像数据异常,所述控制器342控制报警器344进行报警。
46.在本实施方式中,通过所述摄像头2对巡检区域进行摄像,从而可获取得到巡检区域的实时图像数据,将所述图像数据传输给所述控制器342,所述控制器342通过无线传输给远程控制终端,远程控制终端为计算机,计算机将所述摄像头2获取到的所述图像数据与存储的正常的图像数据进行比对,当所述图像数据正常时,在计算机上正常显示所述图像数据,当所述图像数据异常时,计算机发出报警信号并将报警信号传输给所述控制器342,通过所述控制器342来控制所述报警器344进行报警。
47.本发明的一种带有巡查底座的智能巡查机器人100,通过所述摄像头2在所述连接座1上进行转动,从而使得所述摄像头2的摄像角度可进行调节,通过所述摄像头2对巡查区域进行摄像,从而使得所述摄像头2获取的图像可与正常情况下的图像进行比对,进而可知道巡查区域是否存在异常的安全的问题,通过所述支撑板362受到碰撞时产生的朝向所述底座31的挤压力,从而使得所述弹簧361进行收缩,由于所述弹簧361具有自动恢复作用,从而使得所述弹簧361在挤压力逐渐消失时会逐渐恢复到原位,进而使得所述弹簧361可对所述底座31受到的来自所述支撑板362的碰撞力进行缓冲,通过所述弹簧361对所述底座31受到的碰撞力的缓冲,从而降低了巡查机器人在受到碰撞时的损坏风险。
48.以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。