1.本实用新型属于同步辐射领域,具体涉及一种稀薄气体供气装置。
背景技术:
2.上海同步辐射装置(ssrf)是我国性能最优的第三代同步辐射光源,目前运行的软x射线光束线包括bl08u、bl09u、bl02b、bl07u,能量范围从20ev到2000ev。
3.接近光速的电子束团在同步辐射储存环内做圆周运动,在圆周的切线方向产生x射线光。同步辐射光束线位于储存环的下游,同步辐射光束线由不同功能的光学镜箱和真空管道组成,对x射线光进行滤波、色散、衍射、聚焦等处理,最终把x射线安全有效地传输到实验站。
4.x射线照射到光学元件时会在元件表面产生石墨型碳污染物,引起光子能量在碳吸收边(270ev
–
310ev)光子通量的严重损失。另外,碳污染物造成镜子表面粗糙不平,增加杂散光降低能量分辨率。同步辐射光束线运行时,用于容置光学元件的光学镜箱的真空为5
×
10
‑
10
到1
×
10
‑8torr,即使安装一个洁净的光学元件,在几个星期内腔体内的微量碳氢基团就会沉积到光学元件表面,因此发展在线清洗技术才能有效地解决碳污染的问题。
5.在同步辐射光束线设计中,为了提高光子通量通常把光学镜箱放置在同步辐射光束线的前端区域。前端区域的光学元件是光束线碳污染最严重的镜子,但是区域空间狭小且为辐射区域,运行期间人员不能进入,以对其进行清洗。
6.在线碳污染清洗包括等离子体放电清洗、射频放电清洗以及在线通氧清洗等方法。其中,在线通氧清洗方法是指,x射线入射到光学元件时对光学镜箱通氧气,利用氧原子与碳污染物的化学反应,实现光学元件表面碳清洗。当对镜箱通氧气时,x射线能够使氧分子键断裂产生臭氧和游离氧。臭氧和游离氧具有很高的氧化性,在x射线的作用下与碳污染物发生化学反应,产生二氧化碳及一氧化碳等气体并被离子泵抽走,最终达到清洗的目的。
7.在线碳污染清洗具有操作简单、对光学元件损坏较小的优点。碳污染清洗需要1
×
10
‑9到1
×
10
‑8torr的氧气,通常采用手动微漏阀控制氧气流速。同步辐射储存环和同步辐射光束线的真空为2
×
10
‑
10
到1
×
10
‑9torr,因此超高真空的光学镜箱还要求供氧系统具有精密调节能力,实现真空度为1
×
10
‑
12
torr的重复精度,满足超高真空系统的要求。但是手动微漏阀有两个缺点:1.气体流速控制困难,腔体真空剧烈变化会触发真空安全联锁反应,影响光束线站正常使用;2.不能远程控制,当镜箱位于空间狭小或者x射线辐射等区域时,人员无法手动操作通氧设备。
8.因此,急需开发一种安全可靠的自动碳污染清洗装置,以解决远程安全控制氧气通量的难题。
技术实现要素:
9.本实用新型旨在提供一种稀薄气体供气装置,以解决远程安全控制气体通量的难题。
10.为了实现上述目的,本实用新型提供一种稀薄气体供气装置,其包括真空供气系统,所述真空供气系统包括沿气体流动方向通过真空管道连接依次连接的高纯度的供气瓶、双级减压阀、针阀、电动微漏阀和真空差分部件,所述真空差分部件与腔体连接。
11.所述稀薄气体供气装置为软x射线碳污染自动清洗装置,所述真空差分部件与一同步辐射光束线的光学镜箱连接;所述供气瓶具有高压气体,该高压气体为气压为7.5
×
104torr,且纯度至少为99.9995%的高压氧气。
12.所述光学镜箱的气压在1
×
10
‑9到1
×
10
‑8torr之间。
13.所述供气瓶具有高压气体,所述高压气体是氢气、甲烷、二氧化碳、氦气、氮气、氖气、硫化氢和四硫化碳中的一种。
14.所述双级减压阀设置为把高压气体的气压降到750torr;所述针阀设置为手动控制气路开关;所述电动微漏阀设置为精确控制气体流量,使真空差分部件的进气端气压为1
×
10
‑9torr到1
×
10
‑7torr;真空差分部件的出气端气压为1
×
10
‑
10
torr到1
×
10
‑8torr。
15.所述真空差分部件包括一个连接电动微漏阀和腔体的差分腔体、安置于所述差分腔体上的第一真空计、与所述第一真空计连接的第一真空计控制器以及内置的第一离子泵。
16.所述针阀和电动微漏阀之间还可以设有一气动阀;且所述稀薄气体供气装置还包括安全联锁系统,该安全联锁系统包括通过信号线依次连接的第二真空计、第二真空计控制器、继电器和电磁阀,所述第二真空计安置在所述腔体上,电磁阀与所述气动阀连接;所述第二真空计控制器设定一真空阈值,当腔体的真空值大于真空阈值时,第二真空计控制器产生逻辑开关信号并传给继电器;所述继电器设置为根据逻辑开关信号向电磁阀输出相应的开关控制信号。
17.所述继电器与一开关电源连接并与一危险报警装置连接,所述危险报警装置包括危险报警灯和危险报警发声装置。
18.所述稀薄气体供气装置还包括远程控制系统,所述远程控制系统包括电动微漏阀控制模块和计算机,电动微漏阀控制模块为电动微漏阀的电机;所述电动微漏阀控制模块与所述开关电源连接,并且与第二真空计控制器连接;所述电动微漏阀连接第二真空计和电动微漏阀控制模块,且计算机直接与所述电动微漏阀、所述电动微漏阀控制模块连接。
19.本实用新型的稀薄气体供气装置,其真空供气系统采用依次连接的双级减压阀、针阀、电动微漏阀和真空差分系统,真空差分部件与腔体连接,差分系统能够进一步减小进入光学镜箱的气体流量,结合电动微漏阀可实现高精度流量控制,从而可以精准控制腔体内的气体气压,为腔体提供1
×
10
‑
10
到1
×
10
‑8torr的气体,实现真空度为1
×
10
‑
12
torr的重复精度,满足超高真空系统的要求。
20.再者,本实用新型的稀薄气体供气装置的安全联锁系统包括依次连接的第二真空计、第二真空计控制器、继电器和电磁阀,电磁阀与气动阀连接,当腔体的真空值大于真空阈值时,第二真空计控制器产生逻辑开关信号并传给继电器,进而根据逻辑开关信号向电磁阀输出相应的开关控制信号,从而通过气动阀关闭气路管道,实现真空腔体的过压保护。此外,本实用新型的远程控制系统的计算机可以读取真空值和微漏阀电机位置,在计算机端输入真空值或电动微漏阀电机位置,实现远程自动控制气体气压。综上,本实用新型的稀薄气体供气装置具有高精度气体真空控制、真空过压保护、远程自动操控的优点。另外,本
实用新型的稀薄气体供气装置可以是软x射线碳污染自动清洗装置,且真空差分部件与一同步辐射光束线的光学镜箱连接,因此可以有效解决人员无法实时控制碳污染清洗的问题。
附图说明
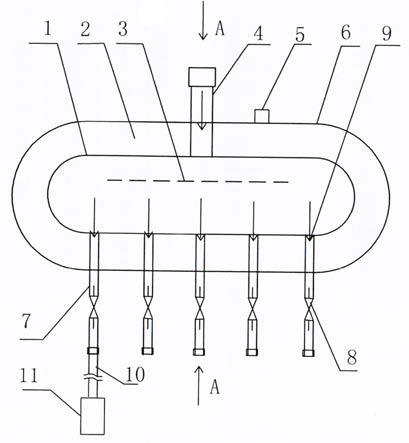
21.图1是本实用新型的稀薄气体供气装置的真空供气系统的结构示意图。
22.图2是本实用新型的稀薄气体供气装置的安全联锁系统的结构示意图。
23.图3是本实用新型的稀薄气体供气装置的远程控制系统的结构示意图。
具体实施方式
24.如图1
‑
图3所示,本实用新型的稀薄气体供气装置由真空供气系统100、安全联锁系统200及控制系统300及组成。
25.在本实施例中,本实用新型的稀薄气体供气装置为软x射线碳污染自动清洗装置,其用于软x射线碳污染自动清洗,能够为光学镜箱提供高纯度氧气,且控制精度为1
×
10
‑
12
torr,具有远程自动控制、安全可靠的优点。此外,在其他实施例中,本实用新型的稀薄气体供气装置也可以替换成供应高纯度的其他气体,可以用于稀薄气体的相关研究,比如高精密气体探测器校准。
26.如图1所示为本实用新型的稀薄气体供气装置的真空供气系统100。该真空供气系统100包括沿气体流动方向通过真空管道连接依次连接的高纯度的供气瓶11、双级减压阀12、针阀13、电动微漏阀14和真空差分部件15。在本实施例中,由于本实用新型的稀薄气体供气装置为软x射线碳污染自动清洗装置,用于为同步辐射光束线的光学镜箱提供高纯度的稀薄氧气,用于在线碳污染清洗,因此所述真空差分部件15与一同步辐射光束线的光学镜箱400连接,箭头指向为氧气流动方向,且供气瓶11具有高压气体,该高压气体为氧气,高压气体的气压为7.5
×
104torr,且纯度至少为99.9995%。在其他实施例中,供气瓶11则可以具有高纯度的其他类型的气体,例如氢气、甲烷、二氧化碳、氦气、氮气、氖气、硫化氢、四硫化碳等等,所述真空差分部件15与不同于光学镜箱400的其他类型的腔体(例如氢气、甲烷、硫化氢、四硫化碳等探测器)连接,以实现其他高真空腔体高精密供气的远程自动控制,通过真空差分部件为氢气、甲烷、硫化氢、四硫化碳等探测器研制与校准提供高精度稀薄气体。
27.双级减压阀12设置为把高压气体降到750torr。针阀13设置为手动控制气路开关,其用于在真空供气系统100使用前,关闭以进行管道尾气清洗,在真空供气系统100出现故障时,关闭以进行系统维护,并在真空供气系统100工作时处于打开状态。电动微漏阀14设置为精确控制气体流量,使真空差分部件15的进气端气压为1
×
10
‑9torr到1
×
10
‑7torr,其中,电动微漏阀14电动微漏阀控制精度为1
×
10
‑
10
torr
·
l/s,不能满足现有的腔体的1
×
10
‑
12
torr的调节精度要求,因此,结合真空差分部件15,可以进一步提高电动微漏阀的控制精度,从而具有精密调节能力,实现真空度为1
×
10
‑
12torr的重复精度,满足超高真空系统的要求。具体来说,电动微漏阀14与下文所述的第二真空计控制器22相连,从而通过下文所述的第二真空计21的真空值可以通过第二真空计控制器22间接地改变电动微漏阀14的电机位置,控制微漏阀气体漏率,从而实现精确的气体流量控制。真空差分部件15包括一个差
分腔体151,该差分腔体151是一个连接电动微漏阀14和腔体(在本实施例中,腔体即光学镜箱400)的小型真空腔体,具体来说,差分腔体151的进气端与电动微漏阀14的出气端通过1/4真空管道相连,差分腔体的出气端通过cf16超高真空角阀与腔体连接。真空差分部件15还包括安置于差分腔体151上的一个第一真空计152,以实时测量差分腔体151的真空值,第一真空计152与第一真空计控制器153连接。第一真空计控制器153的作用是实时读取差分腔体真空,通过第一真空计152控制器界面可以实时读取差分腔体真空值,该真空值就是真空差分部件15的出口端的真空值,用于监测差分腔体的气体流入光学镜箱400的效果,其不与其他任何装置连接。此外,真空差分部件15还包括一个内置的第一离子泵154,从进气端流入出气端时,部分气体被第一离子泵154抽走,进一步降低进入腔体的气体的气压,最终使得真空差分部件15的出气端气压在1
×
10
‑
10
torr到1
×
10
‑8torr之间(对于高压气体为氧气的情况,真空差分部件15的出气端气压也可以在1
×
10
‑9到1
×
10
‑8torr之间)。此外,针阀13和电动微漏阀14之间还可以设有一气动阀16,该气动阀16通过来自安全联锁系统200的一外接的触发信号来控制气路开关,具体电路和工作原理将在下文的安全联锁系统200的部分详述。
28.在本实施例中,腔体为同步辐射装置的光学镜箱400,其与第二离子泵401连接,其内部具有光学元件402如镜子,并设置为接收同步辐射装置中的x射线。由此,当x射线入射到光学镜箱400时,真空供气系统100提供的气体激发成臭氧和游离氧,并与光学镜面上的碳污染物发生化学反应,产生二氧化碳及一氧化碳等气体,被腔体上的第二离子泵401抽走达到清洗的目的。
29.如图2所示为本实用新型的稀薄气体供气装置的安全联锁系统200。该安全联锁系统200包括通过信号线依次连接的第二真空计21、第二真空计控制器22、继电器23和电磁阀24;所述第二真空计21安置在所述腔体上(在本实施例中,腔体即光学镜箱400),用于测量腔体的真空值;电磁阀24与所述真空供气系统100的气动阀16连接;所述继电器23与一开关电源231连接并与一危险报警装置232连接,开关电源231设置为把220v交流电转换成24v直流电压,并给继电器23供电,危险报警装置232包括危险报警灯和危险报警发声装置。由此,第二真空计21实时测量腔体的真空值,第二真空计控制器22设置为读取第二真空计21测量的真空值并设定一真空阈值,当腔体的真空值大于真空阈值时,第二真空计控制器22产生逻辑开关信号并传给继电器23。继电器23设置为根据逻辑开关信号向电磁阀24输出相应的开关控制信号。电磁阀24根据开关控制信号开启和关闭,以控制气动阀16的开关同时触发危险报警装置232,因而在气动阀16关闭时可以快速关闭真空供气系统100,由此,当镜箱真空值大于安全值时,快速关闭管路,阻隔气体进入真空腔体,实现对真空腔体的安全保护,且真空腔体安全保护为硬件触发,不经过计算机,具有安全可靠的优点。此外,当腔体的真空值小于或等于第二真空计控制器22的真空阈值时,第二真空计控制器22不再产生逻辑开关信号,因而可以通过手动控制来关闭继电器23,从而关闭危险报警装置232,并打开气动阀16,以恢复真空供气系统100的供气。
30.该安全联锁系统200还包括通过气路线与所述气动阀16连接的实验大厅气源25。实验大厅气源25的气压为4.5bar,其用于为气动阀16的开关提供动力。需要说明的是,实验大厅气源25不是真空系统的供气瓶11,两者的区别在于,供气瓶11是4l的高纯度的供气瓶,它的气体纯度至少为99.9995%,气压为100bar。而实验大厅气源25中气体为压缩空气而非
高纯度气体,由压缩空气装置提供,通过真空管道输送到不同的光束线和实验站。供气瓶11和实验大厅气源25相互独立。
31.如图3所示为本实用新型的稀薄气体供气装置的远程控制系统300。所述远程控制系统300包括电动微漏阀控制模块31和计算机32。电动微漏阀控制模块31就是电动微漏阀14的电机,所述电动微漏阀控制模块31通过电动微漏阀14的power接口与上文的开关电源231连接,并且与所述安全联锁系统200的第二真空计控制器22连接;由此,共用的开关电源把220v交流电转换成24v直流电压,并给电动微漏阀控制模块31供电,电动微漏阀控制模块31(电动微漏阀14的电机)根据第二真空计控制器22所提供的腔体的真空值,对自身位置(即电动微漏阀14的电机位置)进行控制,当真空值偏低时,通过增大电动微漏阀14的电机位置以提高腔体(在本实施例中,为光学镜箱400)的气体气压;当真空值偏大时,通过减小电动微漏阀14的电机位置,以减低腔体的真空。
32.需要说明的是,第二真空计控制器22设置为只为电动微漏阀14的电(即电动微漏阀控制模块31)提供真空值,只为气动阀16提供真空阈值,而电动微漏阀14和气动阀16相互独立,因此,当气动阀16关闭时,电动阀14电机位置不动,也不会关闭。
33.电动微漏阀14的sensor接口连接第二真空计21和电动微漏阀控制模块31,且计算机32直接与电动微漏阀14的service接口连接,从而把电动微漏阀14的电机的位置信息和真空值信息传递给计算机32;此外,计算机32还通过控制线缆直接与电动微漏阀控制模块31连接,从而通过控制线缆远程控制电动微漏阀14运动。由此,第二真空计21实时读取腔体的真空值,并依据下文的公式(1)把真空值转换成电压信号,用于传输给计算机32,其中电压范围为0
‑
10v。计算机通过其rs232串口(即连接电动微漏阀14的service接口的接口)读取第二真空计21的电压信号和电动微漏阀控制模块31的电机位置信号,并利用下文的公式(2)把电压信号转换成真空值。其中,当电机位置信号表示电机位置为0时,完全关闭电动微漏阀的通氧管路,当电机位置信号表示电机位置为10 000时,完全打开电动微漏阀通氧管道。
34.电压信号u(单位是v)与真空值p(单位是mbar,bar,torr或mtorr)的换算公式如下:
35.u=c 0.8
×
log
10
p (1)
36.p=10
1.25
×
u
‑
d (2)
37.其中,c和d为常数。
38.表格1列出c和d的值随真空值p的单位的变化。
39.表1.c和d值随真空值p的单位的变化
40.pcdmbar10.212.75bar7.89.75torr10.312.875mtorr7.99.875
41.计算机32通过控制线缆远程控制电动微漏阀运动,通过以下两种方法来进行。方法1是在计算机31中直接设置电机位置,通过线缆控制电动微漏阀的电机运动,以控制气体流速,实现腔体通气的远程控制;方法2是在计算机设置真空值,电动微漏阀依据设定真空
值进行电机位置调整,实现腔体通气的自动远程控制。
42.实验结果
43.通过在光学镜箱上,例如上海光源bl02b单色器镜箱上,安装本实用新型的一套稀薄气体供气装置,该稀薄气体供气装置为在线碳污染自动清洗装置,就可以清洗清洗单色器镜箱中平面镜和光栅表面的碳污染物。沿着氧气通气方向依次是供气瓶、双级减压阀、针阀、安全联锁系统(气动阀)、电动微漏阀、真空差分腔体和单色器镜箱。其中供气瓶提供气压为100bar,纯度为99.9995%的氧气,双级减压阀把气压降到0.5bar,通过1/4真空管道把气体传输给针阀,针阀能够手动打开或者关闭真空管路。安全联锁系统是一个集成元件,电源开关能够把220v交流电转换成24v直流电,并为安全系统和电动微漏阀供电,上海光源为气动阀提供4.5bar压缩空气。电动微漏阀sensor接口连接第二真空计21,power接口连接24v直流电,service接口连接计算机。计算机能够读取单色器镜箱的真空值和电动微漏阀的电机位置,其中电机值为0关闭,100000全开。首先电机位置走到0,打开针阀;然后打开光闸403,使得x射线入射到镜子表面。经过长时间离子泵抽气,镜箱真空能够到达5
×
10
‑
10
torr,但是镜子表面仍然附着气体分子,当x射线入射到镜子表面时,气体分子会被激发到腔体中,腔体真空变差。因此,真空示数从5
×
10
‑
10
torr增加到1
×
10
‑9torr;逐渐增大电机值进行通氧,观察真空变化,当电机值为43250时,真空为1
×
10
‑8torr,该条件可以进行碳污染在线清洗。随着气体真空度的增大,清洗效果就越好;但是在清洗的过程中气体可以通过光束线进入储存环中,这是不允许的,因此气体的真空度不能太大,光学镜箱中的真空度的范围为1
×
10
‑9到1
×
10
‑8torr可以满足碳污染清洗的需要,并且不会使气体进入到储存环中。
44.以上所述的,仅为本实用新型的较佳实施例,并非用以限定本实用新型的范围,本实用新型的上述实施例还可以做出各种变化。凡是依据本实用新型申请的权利要求书及说明书内容所作的简单、等效变化与修饰,皆落入本实用新型专利的权利要求保护范围。本实用新型未详尽描述的均为常规技术内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。