c形臂ct设备
技术领域
1.本实用新型涉及医疗机械技术领域,尤其涉及一种c形臂ct设备。
背景技术:
2.c形臂ct设备是一种常用的医疗影像设备,以非侵入性的方式应用于患者介入、骨科成像、创伤、整形外科、泌尿科等多个医疗科室。c形臂ct 设备一般包括设备本体、c形臂、支撑结构和成像设备。其中c形臂通过支撑结构可滑动的设置在设备本体上,以便c形臂相对设备本体上下滑移。成像设备一般设置在c形臂的两个相对端处,一个端处设有射线源,另一个端处设有图像接收器或检测器。c形臂ct设备可以围绕病人转动,以使得病人位于该射线源和图像接收器或检测器之间。
3.现有的移动式c形臂ct设备大都采用单纯的手动操作模式或电动操作模式。单纯的手动操作c形臂ct设备时,由于c形臂ct设备较大,操作者移动起来比较困难而且费时费力。而单纯的电动操作c形臂ct设备在动力停止或驱动系统失效的情况下,使得c形臂ct设备不能使用,耽误病人的治疗。
4.c形臂ct设备的支撑结构中一般包括托架,c形臂通过托架中的滚轮部分的支撑实现滑动。一般情况下,将滚轮直接固定安装在托架上,这就要求c形臂在加工中必须保证很高的加工精度,否则就会滑动不顺畅,同时c 形臂ct设备在移动过程中容易出现振动。而现有技术中使用偏心结构来调整c形臂c形臂侧面的间隙,从而使得运行顺畅,但是偏心结构时间久了容易松动,需要经常调整或更换以使得设备继续顺畅运行。
5.有鉴于此,确有必要提供一种c形臂ct设备,以解决上述问题。
技术实现要素:
6.本实用新型的目的在于提供一种具有调节结构的c形臂ct设备。
7.为实现上述目的,本实用新型提供了c形臂ct设备,包括c形臂、托架、水平横臂和设备本体,所述托架可移动的连接在所述c形臂上,所述水平横臂与所述设备本体及所述托架连接,所述托架内可拆卸的连接有轮系模块,所述轮系模块上设有用于支撑所述c形臂的承重结构和用于调整所述轮系模块与所述c形臂上的导轨的两侧壁的间隙的限位结构,所述承重结构和所述限位结构集成在所述轮系模块的轮系座上。
8.作为本实用新型的进一步改进,所述限位结构包括定心轮组件、可调轮组件和调节螺杆,所述定心轮组件和所述可调轮组件分别连接在所述轮系座的左右两侧,所述调节螺杆位于所述定心轮组件和所述可调轮组件之间,且贯穿所述可调轮组件,用于调整所述轮系模块与所述导轨的两侧壁的间隙。
9.作为本实用新型的进一步改进,所述可调轮组件包括可调滚轮和可调轮板,所述可调轮板包括平行于水平面的底面和垂直于底面的侧面,所述可调滚轮固定连接在所述可调轮板的所述底面上;所述调节螺杆贯穿所述侧面,用于调整所述可调轮板,以使其相对所述轮系座移动。
10.作为本实用新型的进一步改进,所述可调轮板的底面上设有腰型孔,固定件通过所述腰型孔将所述可调轮板固定连接在所述轮系座上。
11.作为本实用新型的进一步改进,所述可调滚轮在径向方向上的截面平行于所述可调轮板的底面。
12.作为本实用新型的进一步改进,所述承重结构包括第一固定轮结构和第二固定轮结构,所述第一固定轮结构固定连接在所述轮系座上,且靠近所述托架的中心;所述第二固定轮结构通过自适应轮板可移动的连接在所述轮系座上,且远离所述托架的中心。
13.作为本实用新型的进一步改进,所述第一固定轮结构包括2个对称设置的第一固定轮,所述第二固定轮结构包括2套对称设置的第二固定轮组和2 个所述自适应轮板,2套所述第二固定轮组分别通过对应的所述自适应轮板连接在所述轮系座上,且所述第一固定轮和所述第二固定轮组在径向方向的截面垂直于所述轮系座。
14.作为本实用新型的进一步改进,所述托架中包括2套所述轮系模块,且 2套所述轮系模块围绕所述托架的中心对称设置在所述托架的上下两端。
15.本实用新型的另一目的是为了提供手电一体的c形臂ct设备。
16.为实现上述目的,本实用新型提供了一种c形臂ct设备,包括c形臂、托架、水平横臂和设备本体,所述托架可移动的连接在所述c形臂上,所述水平横臂与所述设备本体及所述托架连接,所述托架内可拆卸的连接有轮系模块,所述轮系模块上设有用于支撑所述c形臂的承重结构和用于调整所述轮系模块与所述导轨的两侧壁的间隙的限位结构,所述承重结构和所述限位结构集成在所述轮系模块的轮系座上;所述c形臂ct设备还包括离合器、驱动电机和控制单元,所述控制单元位于所述设备本体内部,用于控制电器元件;所述离合器位于所述托架内的2套所述轮系模块的中间,且与所述控制单元电连接,所述离合器的中心轴上连接有主传动带轮和驱动带轮,所述驱动带轮可移动的连接在所述中心轴的端部,所述主传动带轮通过同步带与所述c形臂连接;所述驱动电机位于所述托架外侧壁,所述驱动电机与所述驱动带轮连接,且与所述控制单元电连接。
17.作为本实用新型的进一步改进,所述离合器的中心轴上设有编码器齿轮,所述编码器齿轮位于所述主传动带轮和所述驱动带轮中间,且与所述主传动带轮同步转动;所述编码器齿轮与位于所述电机后端的电机编码器连接,所述电机编码器与所述控制单元电连接;在所述编码器齿轮的下方有与之啮合的负载端编码器引出齿轮,所述负载端编码器引出齿轮的后端连接有负载端编码器,所述负载端编码器与所述控制单元电连接。
18.本实用新型的有益效果是:本实用新型的c形臂ct设备,一方面通过将承重结构和限位结构集成在轮系模块上,使得c形臂ct设备结构紧凑,安装方便,同时通过在限位结构上设置调节螺杆和腰型孔,用于调整轮系模块与c形臂导轨11两侧壁的间隙,解决轮系模块不易调整的问题。通过在承重结构上设置自适应轮板,使得每个滚轮都可以均匀受力,保证设备运行顺畅。另一方面,通过设置离合器和驱动电机装置,使得c形臂ct设备为手电一体设备,可按照需要在手动和电动操作之间来回转换,提高设备利用率。另外,通过设置两个编码器,实现电动模式下的闭环控制,提高设备的运行系统精度。
附图说明
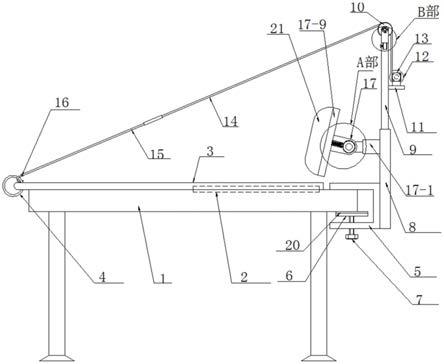
19.图1是本实用新型作为实施例的c形臂ct设备的立体图。
20.图2是图1的局部结构拆解图。
21.图3是图2中圆圈部分的放大图。
22.图4是图3中局部结构示意图。
23.图5是图3中另一局部结构示意图。
具体实施方式
24.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
25.在此,需要说明的是,为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与本发明的方案密切相关的结构和/或处理步骤,而省略了与本发明关系不大的其他细节。
26.另外,还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
27.请参阅图1
‑
3所示,为本实用新型提供的一种c形臂ct设备,包括c 形臂1、设备本体4以及连接在c形臂1和设备本体4之间的托架2和水平横臂3。设备本体4内设置有控制单元41(未图示),用于控制各种电器元件。控制单元41与托架2、水平横臂3和c形臂1上的成像设备电连接,进而控制c形臂1沿着设备本体4的周向相对往复转动,使得c形臂1上的成像设备能够对准待检测部位。进一步的,设备本体4的底部还设有滑轮5,使得c形臂ct设备100可相对地面移动,有效提升了c形臂ct设备100 的实用性。
28.进一步的,c形臂1内设有导轨11,优选的,该导轨11为铝导轨。托架 2可移动的连接在c形臂1的导轨11上,用于支撑c形臂1以及调节c形臂1沿着竖直方向上下移动。优选的,托架2包括壳体20和收容在壳体20 内的可拆卸连接的轮系模块21,轮系模块21上设置有用于支撑c形臂1的承重结构22和用于调节轮系模块21与导轨11的两侧壁的间隙的限位结构 23,承重结构22和限位结构23集成在轮系模块21的轮系座211上。通过将承重结构22和限位结构23集成在轮系模块21的轮系座211上,简化了现有的c形臂ct设备100的调节结构,减小了调节结构的占用空间。另外,将集成了承重结构22和限位结构23的轮系模块21直接滑进c形臂1的导轨11内,使得托架2与c形臂1之间安装方便,结构布局紧凑,避免c形臂ct设备100体积过大。
29.请参阅图4并结合图3所示,该限位结构23进一步的包括定心轮组件 231、可调轮组件232和调节螺杆233。定心轮组件231和可调轮组件232分别连接在轮系座211的左右两侧,调节螺杆233位于定心轮组件231和可调轮组件232之间,并且贯穿可调轮组件232,用于调整轮系模块21与c形臂 1的两侧壁的间隙。
30.进一步的,定心轮组件231包括定心滚轮2311和定心轮板2312,定心滚轮2311固定连接在定心轮板2312上,定心轮板2312通过固定件固定连接在轮系座211的一侧。在本发明一较佳实施例内,该固定件为螺钉,在定心轮板2312上设有圆孔,螺钉穿过圆孔将定心轮板2312固定在轮系座211 上,定心滚轮2311通过螺钉固定在定心轮板2312上。通过该设置,可以使得定心轮组件231固定不动,只需要单独调整可调轮组件232就可以使得定心滚轮2311
和可调滚轮2321之间的距离与c形臂1内的导轨11的两侧壁的间距相等,使得调整步骤简单。
31.进一步的,可调轮组件232包括可调滚轮2321和可调轮板2322,可调轮板2322包括平行于水平面的底面和垂直与底面的侧面,可调滚轮2321固定连接在可调轮板2322的底面上远离侧面的一端。具体的,可调滚轮2321 通过螺钉固定在可调轮板2322的底面上并且位于远离可调轮板2322侧面的一端。调节螺杆233贯穿可调轮板2322的侧面,可以通过使用调节螺杆233 调整可调轮板2322的位置。具体的,可调轮板2322的底面上设有腰型孔 2323,因为腰型孔2323的存在,使得可调轮板2322相对于轮系座211可移动。通过调节螺杆233调整可调轮板2322的位置,使得可调轮板2322在水平方向上能够移动,进而使得可调滚轮2321在水平方向上能够移动,从而可以调整定心滚轮2311和可调滚轮2321之间的距离,使之与轮系模块21与 c形臂1内的导轨11的两侧壁的宽度相等,使得轮系模块21滑进与c形臂 1的导轨11内后,与导轨11的两侧壁贴合,从而达到设备运行顺畅的目的。
32.优选的,调整好可调轮板2322的位置后,使用固定件将可调轮板2322 固定在轮系座211上,固定牢固,不易松动。具体的,在本发明一较佳实施例内,该固定件为螺钉,螺钉通过可调轮板2322上的腰型孔2323将可调轮板2322固定连接在轮系座211上。通过螺钉将可调轮板2322固定在轮系座 211上,连接牢固,时间久也不容易松动。通过使用调节螺杆233调节可调轮组件232,使得定心滚轮2311和可调滚轮2321之间的距离与轮系模块21 与c形臂1内的导轨11的两侧壁的间距相等,并通过固定件将可调轮组件 232固定在轮系座211上,解决了支撑轮系结构不易调整以及使用偏心结构时间久容易松动的问题。
33.进一步的,可调滚轮2321在径向方向的截面平行于可调轮板2322的底面。定心滚轮2311在径向方向的截面平行于可调滚轮2321在径向方向的截面。通过如此设置,可以使得定心滚轮2311和可调滚轮2321的圆周面接触 c形臂1的导轨11的两侧壁,使得轮系模块21与c形臂1的导轨11的两侧壁更加贴合,提高c形臂ct设备100的使用稳定性。
34.具体的,本发明一较佳实施例中限位结构23调节步骤为:先使用调节螺杆233调整可调轮板2322,使得定心滚轮2311和可调滚轮2321之间的距离与c形臂1内的导轨11的两侧壁的间距相等,然后使用螺钉将可调轮板2322 固定在轮系座211上。最后将调整好的轮系模块21滑进c形臂1的导轨11 内。在其他实施例中,也可以使用偏心轮调整轮系座211与c形臂1的导轨 11的两侧壁的间隙。
35.进一步的,承重结构22包括第一承重轮组221和第二承重轮组222,第一承重轮组221固定连接在轮系座211上,且靠近托架2的中心。进一步的,第一承重轮组221包括两个对称设置的承重轮2211。因为第一承重轮组221 靠近托架2的中心,最先接触到c形臂1的导轨11,故第一承重轮组221中的两个对称设置的承重轮2211与c形臂1的导轨11完全接触,均起到支撑 c形臂1的作用。
36.进一步的,第二承重轮组222通过自适应轮板2222可移动的连接在轮系座211的支撑板2111上,且远离托架2的中心,第二承重轮组222包括两套对称设置的第二承重轮2221和两个自适应轮板2222,两套第二承重轮2221 分别通过对应的自适应轮板2222连接在轮系座211的支撑板2111上,且第二承重轮2221在径向方向的截面垂直于轮系座211。因为第二承重轮组222 远离托架2的中心,故第二承重轮组222中的第二承重轮2221与c形臂1 的弯曲面接触,容易导致第二承重轮2221中的每个滚轮承载的重量不一致的现象,使得轮系
模块21在c形臂1的导轨11上滑动不顺畅。通过在轮系座211的侧壁上设置自适应轮板2222,第二承重轮组222通过自适应轮板 2222连接在轮系座211的支撑板2111上,使得第二承重轮组222可以根据 c形臂1的结构进行微小调整,使得第二承重轮2221中的每个滚轮都能与c 形臂1的导轨11贴合,受力均匀,进而使得轮系模块21在c形臂1的每个位置都可以顺滑移动。在c形臂1的移动过程中,第二承重轮2221中的滚轮能够通过自适应轮板2222自我调节,不会因为移动而使得c形臂1滑动不畅。具体的,在本发明一较佳实施例内,每个第二承重轮2221中含有两个滚轮,在其他实施例中,第二承重轮2221中的滚轮数量可以为一个或两个以上,本发明对此不作限制。
37.进一步的,本发明的c形臂ct设备100包括两套轮系模块21,且两套轮系模块21围绕托架2中心对称设置在托架2的上下两端。通过如此设置,可以使得轮系模块21在进入c形臂1的导轨11时,可以有两个限位结构23 对轮系模块21与c形臂1的导轨11的侧壁间隙进行调整,解决了支撑轮系结构不易调整的问题。在c形臂1的上下运动过程中,有两个承重结构22 承载c形臂1的重量,使得c形臂1的重量很好的分散到每个承重轮上,进而使得c形臂1的运动更顺滑。
38.请参阅图5并结合图3所示,本实用新型另外提供了一种手电一体的c 形臂ct设备100,包括c形臂1、托架2、水平横臂3和设备本体4,所述托架2可移动的连接在所述c形臂1上,所述水平横臂3与所述设备本体4 及所述托架2连接,所述托架2内可拆卸的连接有轮系模块21,所述轮系模块21上设有用于支撑所述c形臂1的承重结构22和用于调整所述轮系模块 21与所述导轨11的两侧壁的间隙的限位结构23,所述承重结构22和所述限位结构23集成在所述轮系模块21的轮系座211上。所述c形臂ct设备 100还包括离合器24、驱动电机25和控制单元41,所述控制单元41位于所述设备本体4内部的收容空间内,用于控制各种电器元件。所述离合器24位于所述托架2内的2套所述轮系模块21的中间,且与所述控制单元41电连接,所述离合器24的中心轴241上连接有主传动带轮26和驱动带轮27,所述驱动带轮27可移动的连接在所述中心轴241的端部,所述主传动带轮26 通过同步带261与所述c形臂1连接;所述驱动电机25位于所述托架2外侧壁,所述驱动电机25与所述驱动带轮27连接,且与所述控制单元41电连接。
39.进一步的,该驱动电机25为蜗轮蜗杆减速电机25,当断电时,该蜗轮蜗杆减速电机25可以断电自锁,提高c形臂ct设备100的安全性。
40.进一步的,所述离合器24为电磁离合器24,断电时,电磁离合器24呈吸合状态,此时c形臂ct设备100为电动模式。通电时,电磁离合器24呈释放状态,此时c形臂ct设备100为手动模式。
41.具体的,该c形臂ct设备的手动操作和电动操作的切换流程如下:
42.当离合器24断电时,该c形臂ct设备启动电动模式。具体为,控制单元41控制离合器24断电,驱动电机25启动,驱动电机25带动驱动带轮27 中的小轮271运动,并通过驱动同步带273带动驱动带轮27的大轮272运动,且通过驱动带轮27的大轮272进行减速。因为断电,离合器24呈吸合状态,进而驱动带轮27能够带动离合器24中心轴转动,从而带动主传动带轮26运动,主传动带轮26带动同步带261运动,从而驱动整个c形臂1运动。
43.当离合器24通电时,该c形臂ct设备启动手动模式。具体为,控制单元41控制离合器24通电,手动拉动c形臂1,导致同步带261运动,进而导致主传动带轮26转动。因为离合器
24通电时是释放状态,故驱动带轮27 固定不动。
44.进一步的,所述离合器24的中心轴上设有编码器齿轮28,所述编码器齿轮28位于所述主传动带轮26和所述驱动带轮的大轮272中间,且与所述主传动带轮26同步转动;在所述编码器齿轮28的下方有与之啮合的负载端编码器引出齿轮29,所述负载端编码器引出齿轮29上设有负载端编码器291,所述负载端编码器291可以实时记录c形臂1的运动位置。
45.进一步的,所述离合器24的中心轴上设有编码器齿轮28,所述编码器齿轮28位于所述主传动带轮26和所述驱动带轮的大轮272中间,且与所述主传动带轮26同步转动;所述编码器齿轮28与位于所述驱动电机25后端的电机编码器251连接,所述电机编码器251与所述控制单元41电连接;在所述编码器齿轮28的下方有与之啮合的负载端编码器引出齿轮29,所述负载端编码器引出齿轮29的后端连接有负载端编码器291,所述负载端编码器291与所述控制单元41电连接。
46.具体的,在电动模式下,驱动电机25带动驱动带轮27运动,进而带动主传动带轮26转动,编码器齿轮28随着主传动带轮26的转动而同步转动,进而使得电机编码器251实时记录驱动电机25转动的位置,并反馈给控制单元41。因负载端编码器引出齿轮29与编码器齿轮28啮合,故编码器齿轮28能够带动负载端编码器引出齿轮29同步转动,使得负载端编码器291能够实时记录c形臂1的位置,并反馈给控制单元41。控制单元41同时读取电机编码器251和负载端编码器291的位置信号,如果两个位置信号同步,则不需要调整驱动电机25的速度。如果两个位置信号不同步,则控制单元 41控制驱动电机25调整速度,进而使得两个位置信号同步。通过在驱动电机25端设置电机编码器251和在负载端设置负载端编码器291,可以在电动模式下实时记录c形臂1的运动位置,实现闭环控制,提高c形臂1的运动系统精度。
47.综上所述,本实用新型的c形臂ct设备,一方面通过将承重结构22和限位结构23集成在轮系模块21上,使得c形臂ct设备100结构紧凑,安装方便,同时通过在限位结构23上设置调节螺杆233用于调整轮系模块21 与c形臂1的导轨11的两侧壁的间隙,使得支撑调节结构简单不易松动,解决了支撑轮系结构不易调整的问题。通过在承重结构22上设置自适应轮板2222,使得每个滚轮都可以均匀受力,保证轮系模块21可以在c形臂1 的导轨11上运行顺畅。另一方面,通过设置离合器24和驱动电机25装置,使得c形臂ct设备100为手电一体设备,可按照需要在手动和电动操作之间来回转换,提高设备利用率。另外,通过设置电机编码器251和负载端编码器291,实现电动模式下实时记录的闭环控制,提高设备的运行系统精度。
48.以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。