1.本实用新型涉及农用机械领域,具体涉及一种麦冬摘果装置。
背景技术:
2.麦冬又名沿阶草、书带草、麦门冬、寸冬,为百合科沿阶草属多年生常绿草本植物。麦冬须根较粗壮,根的顶端或中部常膨大成为纺锤状肉质小块。麦冬块根能够入药,具有提高免疫功能、增强垂体肾上腺皮质系统功能、降血糖等作用。
3.为解决人工摘果或切苗问题,提高采摘效率,现有技术中设计有自动采摘麦冬的块根或者自动切苗的麦冬切苗摘果机。专利cn211153742u公开了一种麦冬摘果机,通过在转板的不同面上设置的多个胶柱有序的击打麦冬根部的块根,规律排布的胶柱在旋转拍打过程中与麦冬须根方向一致,便于保持须根完整的前提下分离掉块根。专利cn112020989a公开了一种麦冬摘果切苗机,其利用设置在输送链条一侧的旋刀机构,在麦冬输送的过程中切割麦冬从输送链条侧面的延伸出的块根。现有技术虽然能够实现麦冬在移动过程中的摘果工艺,但是所采用的拍打或切割方式容易出现块根不易分离、麦冬移动方向偏移、摘果装置卡顿的情况,降低麦冬的摘果率和分离效率。
技术实现要素:
4.本实用新型的目的在于提供一种麦冬摘果装置,以解决现有技术中的摘果装置在摘除麦冬块根的过程中容易出现块根不易分离、麦冬移动方向偏移、摘果装置卡顿的情况,进而导致麦冬摘果效率和摘果率不高的问题。
5.本实用新型通过下述技术方案实现:
6.一种麦冬摘果装置,包括外壳,所述外壳上设置有进料口和收集口,所述外壳内设置有至少一组摘果机构组,所述摘果机构组包括上、下设置的两个摘果机构,所述摘果机构包括控制机构和刀具组,所述两个摘果机构的刀具组用于在控制机构的驱动下沿预设轨迹移动,所述预设轨迹包括切割段和夹取段,在所述切割段,两个刀具组相互配合并切割麦冬的块根部,在所述夹取段,两个刀具组相互配合并夹取切割后的块根部。
7.本技术方案中,麦冬摘果装置设置在麦冬机的输送链条的一侧以在输送麦冬的过程中切割麦冬位于输送链条外侧的块根部。麦冬摘果装置的外壳上设置有进料口和收集口,其中,进料口用于摘果机构组的刀具组伸入或伸出外壳以切取块根部并将块根部带入外壳内,收集口用于将外壳内堆积的块根部排出至外壳外部进行收集。
8.麦冬摘果装置的核心组件为外壳内设置的一组或多组摘果机构组。摘果机构组包括上摘果机构和下摘果机构,上、下两个摘果机构的结构相同,均包含有一个控制机构和刀具组。其中,所述控制机构用于驱动所述刀具组沿预设的轨迹移动。
9.刀具组移动的路径至少包括依次连接的切割段和夹取段。当需要摘果时,控制机构驱动刀具组经进料口移至外壳的外部,之后刀具组进入切割段,上下两个刀具组相向移动,至切割段的行程极限时,例如,上刀具组移动至切割段底端,下刀具组移动至切割段顶
端,此时刀具组配合并切割麦冬主体与块根部的连接处以分离块根部,或者在麦冬上形成切口。之后相互配合的刀具组进一步移动至夹取段,并进入外壳内部。在沿夹取段移动的过程中,刀具组夹持块根部,并将其向远离麦冬的方向拉扯,故在切割后提供进一步的拉力,以促使块根部的分离,分离后,块根部随刀具组进入至外壳内收集。
10.相较于现有技术中通过拍打或切割的分离方式,本技术方案利用摘果机构组的控制机构驱动刀具组沿预设轨迹移动,并先后经过切割段和夹取段,实现了切割和夹取相结合的分离方式,对于块根部与麦冬茎的连接处易于割断的情况,能够在切割后夹持并输送块根部至外壳内部,对于块根部与麦冬茎的连接处韧性高、切割点位于块根上或者其他不易割断的情况,能够在切割形成切口后,进一步通过夹取拉扯而分离块根部,显著地提高了麦冬摘果效率和摘果率;此外,上下刀具组在配合过程中互为支撑,能够有效地避免块根部在被拍打或旋刀切割的过程中通过朝向反方向移动而卸力的情况,进一步提高摘果效果。
11.本实用新型的预设轨迹可以是多种形状,例如圆形、三角形、多边形或者不规则图形,只要包括依次连接的切割段和夹取段即可。作为本实用新型中预设轨迹的优选实施方式,所述预设轨迹为矩形运动轨迹,所述两个摘果机构的刀具组的移动方向相反。所述矩形运动轨迹的切割段和夹取段相互垂直,且切割段位于外壳的外部。平行于切割段且位于外壳内部的竖直段以及平行于夹取段的水平段作为移动段。假定刀具组的初始位置位于竖直段底部,工作时,两个刀具组沿竖直段背向移动,之后进入至水平段,并沿水平段经进料口向输送中的麦冬移动,之后进入切割段,两个刀具组沿切割段相向移动直至到行程极限时,切断块根与茎的连接,或者在连接处/块根部上留有切口,同时块根位于相贴合的刀具组夹持,随后配合的刀具组沿夹取段移动并进入外壳内部,在移动过程中实现进一步分离,进入外壳后,刀具组再次进入竖直段相互远离,夹持的块根部则在此时落入外壳内进行收集。为实现刀具组的配合,上、下两个刀具组的移动方向相反,例如一个矩形运动轨迹为顺时针移动,另一个则为逆时针移动。
12.作为本实用新型的控制机构的一种优选结构,所述控制机构包括第一驱动装置和第一导向杆,所述第一导向杆上滑动设置有滑块,所述滑块上设置有与第一导向杆相垂直的第二导向杆,所述第二导向杆上滑动设置有连杆,所述连杆连接至刀具组,连杆上铰链连接有推杆,所述推杆的外侧套设有转向块,所述转向块与第一驱动装置的输出端连接,所述推杆的外侧还套设有位于转向块和连杆之间的第一弹簧。本技术方案中,控制机构的驱动设备为第一驱动装置。第一驱动装置的输出端连接有转向块,并能够带动转向块旋转。转向块内设置有导向通孔,该导向通孔内设置的推杆能够沿导向通孔移动。推杆的一端铰链连接至连杆上,使得推杆与连杆之间的夹角能够随连杆在矩形轨迹上的不同位置而变化,推杆与连杆的铰接方式可以采用销孔和销轴配合的方式实现,例如在推杆和连杆上均设置销孔,并通过活动插入至销孔中的销轴实现铰接。第一导向杆和第二导向杆是确保连杆沿矩形轨迹移动的导向部件。具体地,第一导向杆水平设置,垂直于第一导向杆的第二导向杆通过滑块与第一导向杆滑动连接,同时,连杆上开设有与第二导向杆外径相匹配的通孔,以使得连杆能够沿第二导向杆移动,在转向块推过推杆带动连杆沿第一导向杆、第二导向杆移动的过程中实现连杆的矩形运动轨迹。本技术方案中,推杆上还设置有第一弹簧,在连杆移动过程中,推杆铰接端到转向块之间的距离不断变化,在经过转向块与移动轨迹距离较远的区域时,推杆铰接端到转向块的距离增长,此时弹簧拉伸释能,反之,在经过距离较近的
区域时,距离缩短,此时弹簧压缩储能,当第一弹簧在储能和释能间切换时,能够使刀具组在经过切割段和夹取段时,能够对麦冬施加逐渐增大或逐渐减小的非恒定作用力,相较于现有技术中恒定的作用力,能够产生较高的冲力以进一步提高块根的分离效果。
13.在部分实施例中,转向块可以同心设置,即设置于矩形运动轨迹的中心位置,也可以偏心设置,将其设置于靠近矩形运动轨迹的一个角。
14.作为矩形运动轨迹偏心设置的一种优选实施方式,所述转向块位于所述矩形运动轨迹内,所述转向块靠近第二导向杆的下端和第一导向杆远离进料口的一端。本技术方案中,转向块靠近矩形运动轨迹的竖直段和夹取段之间的夹角处。工作时,进入切割段后,刀具组竖直向下的移动过程中,由于转向块距离切割段较远,第一弹簧处于自然状态或者伸长状态,刀具组所受第一弹簧的影响小,或者受一定程度的释能影响,两个刀具组能够正常或加速相向移动,以提高刀具组在根茎连接处的作用力,增强切割效果。切割完成后,在夹取段移动的过程中,随着转向块与夹取段之间的距离逐渐缩短,第一弹簧不断储能,夹取过程相较于转向块同心设置更加缓慢。
15.作为矩形运动轨迹偏心设置的另一种优选实施方式,所述转向块位于所述矩形运动轨迹内,所述转向块靠近第二导向杆的下端和第一导向杆靠近进料口的一端。本技术方案中,转向块靠近矩形运动轨迹的切割段和夹取段之间的夹角处。工作时,进入切割段后,刀具组竖直向下移动的过程中,第一弹簧先逐渐压缩储能后逐渐伸长释能,在两个刀具组接触时,能够加速相对移动进而提高刀具组在根茎连接处的作用力,增强切割效果。随后,进入夹取段后,第一弹簧再次先逐渐压缩储能后逐渐伸长释能,在释能阶段,第一弹簧推动连杆快速沿夹取段移动,以施加逐渐增大的拉力,增强分离效果。该偏心结构能够同时实现切割段和夹取段的弹簧释能,利用第一弹簧的作用力对根茎连接处或切口施加逐渐变化的作用力,以在切割段有利于提高切割力,并在夹取段有利于提高拉力,显著地提高块根分离效果。
16.进一步地,所述刀具组包括安装板,所述安装板上设置有若干切刀,上、下两个刀具组的切刀相向移动并切割麦冬的块根部。安装板固定连接于连杆上。安装板上并排设置有若干切刀,故在切割段的行程极限时,上下刀具组的切刀配合后能够同时切割输送链条的一段距离上的所有块根部,并在输送链条继续输送的过程中,依次经过夹取段、竖直段和水平段后,在另一段距离的麦冬再次移动至对应位置后,再次切割该段距离上的所有块根部。
17.进一步地,所述切刀包括刀刃和夹持槽,在上、下切刀配合时,所述夹持槽用于夹取麦冬的块根部。切割时,刀刃和夹持槽同时移动,夹持槽用于夹持块根,而刀刃用于切割根茎连接处,切割完成后,无论是连接处断开或者是形成切口,配合的切刀均通过夹持槽形成夹持区域对其中的块根部进行夹持以拖动其沿夹取部移动,实现麦冬的夹取分离。
18.进一步地,沿夹持槽靠近刀刃的一端至夹持槽远离刀刃的一端的方向,所述夹持槽的深度逐渐增加。本技术方案中,在夹取段内两个切刀相互配合时,上下两个夹持槽构成锥形夹持区域,且锥形夹持区域的内径沿切割段至竖直段的方向逐渐增大,从而使块根部更加容易与麦冬的茎相分离,并在切刀相互远离后,从夹持槽中脱落。
19.进一步地,所述安装板上设置有若干凹槽,所述切刀滑动设置于凹槽内,切刀与凹槽一一对应,所述凹槽内设置有第二弹簧,所述第二弹簧与切刀连接。安装板上设置的若干
凹槽用于放置切刀,切刀能够沿凹槽移动。切刀上设置有第二弹簧,该第二弹簧与凹槽连接,以使得外力卸除后,切刀能够复位至其在凹槽内的初始位置。第二弹簧不仅能够复位切刀,而且在夹取不易分离的块根部时,切刀首先保持不动,安装板随着连杆向竖直段移动时,第二弹簧逐渐拉长并蓄力,块根部所受拉力不断增大,在大于阈值后随即与麦冬茎分离。结合偏心的矩形运动轨迹,第二弹簧能够在第一弹簧释能的过程中快速完成蓄力,从而产生瞬时冲力而显著提高分离效果。
20.进一步地,所述摘果机构组下方设置有螺杆,所述螺杆用于将外壳内的块根部经收集口输送至外壳的外部。
21.本实用新型与现有技术相比,具有如下的优点和有益效果:
22.1、本实用新型利用摘果机构组的控制机构驱动刀具组沿预设轨迹移动,并先后经过切割段和夹取段,实现了切割和夹取相结合的分离方式,对于块根部与麦冬茎的连接处易于割断的情况,能够在切割后夹持并输送块根部至外壳内部,对于块根部与麦冬茎的连接处韧性高、切割点位于块根上或者其他不易割断的情况,能够在切割形成切口后,进一步通过夹取拉扯而分离块根部,显著地提高了麦冬摘果效率和摘果率;
23.2、本实用新型的上下刀具组在配合过程中互为支撑,能够有效地避免块根部在被拍打或旋刀切割的过程中通过朝向反方向移动而卸力的情况,进一步提高摘果效果;
24.3、本实用新型的控制机构使得连杆在沿矩形运动轨迹移动的过程中,能够反复储能和释能,进而在储能和释能状态间切换的过程中,使得刀具组在经过切割段和夹取段时,能够对麦冬施加逐渐增大或逐渐减小的非恒定作用力,相较于现有技术中恒定的作用力,能够产生较高的冲力以进一步提高块根的分离效果;
25.4、本实用新型通过将转向块偏心设置于矩形运动轨迹的靠近切割段和夹取段之间的夹角处,能够同时实现切割段和夹取段的弹簧释能,利用第一弹簧的作用力对根茎连接处或切口施加逐渐变化的作用力,以在切割段有利于提高切割力,并在夹取段有利于提高拉力,显著地提高块根分离效果;
26.5、本实用新型的刀具组通过在安装板上设置凹槽,并在凹槽内设置连接切刀的第二弹簧,不仅能够复位切刀,而且在夹取不易分离的块根部时,切刀首先保持不动,安装板随着连杆向竖直段移动时,第二弹簧逐渐拉长并蓄力,块根部所受拉力不断增大,在大于阈值后随即与麦冬茎分离;不仅如此,结合偏心的矩形运动轨迹,第二弹簧能够在第一弹簧释能的过程中快速完成蓄力,从而产生瞬时冲力而显著提高分离效果。
附图说明
27.此处所说明的附图用来提供对本实用新型实施例的进一步理解,构成本技术的一部分,并不构成对本实用新型实施例的限定。在附图中:
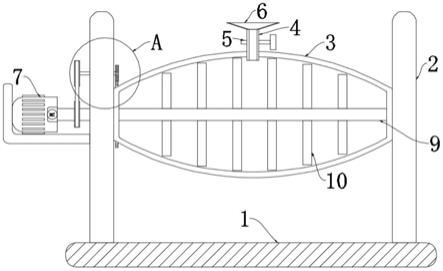
28.图1为本实用新型具体实施例的结构示意图;
29.图2为本实用新型具体实施例中摘果机构组的结构示意图;
30.图3为本实用新型具体实施例中一种结构的摘果机构组在第一状态下的示意图;
31.图4为本实用新型具体实施例中一种结构的摘果机构组在第二状态下的示意图;
32.图5为本实用新型具体实施例中一种结构的摘果机构组在第三状态下的示意图;
33.图6为本实用新型具体实施例中另一种结构的摘果机构组在第四状态下的示意
图;
34.图7为本实用新型具体实施例中另一种结构的摘果机构组在第五状态下的示意图;
35.图8为本实用新型具体实施例中上/下摘果机构的刀具组的示意图;
36.图9为本实用新型具体实施例中切刀的结构示意图。
37.附图中标记及对应的零部件名称:
[0038]1‑
外壳,11
‑
收集口,2
‑
摘果机构组,21
‑
第一导向杆,22
‑
第二导向杆,23
‑
滑块,24
‑
第一弹簧,25
‑
转向块,26
‑
推杆,27
‑
第一驱动装置,28
‑
连杆,29
‑
刀具组,291
‑
安装板,292
‑
凹槽,293
‑
切刀,294
‑
第二弹簧,295
‑
刀刃,296
‑
夹持槽,3
‑
螺杆,31
‑
第二驱动装置。
具体实施方式
[0039]
为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
[0040]
在本实用新型的描述中,需要理解的是,术语“前”、“后”、“左”、“右”、“上”、“下”、“竖直”、“水平”、“高”、“低”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制。
[0041]
实施例1:
[0042]
如图1所示的一种麦冬摘果装置,包括外壳1,所述外壳1上设置有进料口和收集口11,所述外壳1内设置有至少一组摘果机构组2,所述摘果机构组2包括上、下设置的两个摘果机构,所述摘果机构包括控制机构和刀具组29,所述两个摘果机构的刀具组29用于在控制机构的驱动下沿预设轨迹移动,所述预设轨迹包括切割段和夹取段,在所述切割段,两个刀具组29相互配合并切割麦冬的块根部,在所述夹取段,两个刀具组29相互配合并夹取切割后的块根部;所述预设轨迹为矩形运动轨迹移动,所述两个摘果机构的刀具组29的移动方向相反。
[0043]
本实施例中,麦冬摘果装置设置在麦冬机的输送链条的一侧以在输送麦冬的过程中切割麦冬位于输送链条外侧的块根部。进料口用于摘果机构组的刀具组伸入或伸出外壳以切取块根部并将块根部带入外壳内,收集口11用于将外壳内堆积的块根部排出至外壳外部进行收集。
[0044]
在本实施例中,预设轨迹为矩形运动轨迹,矩形运动轨迹包括依次连接的切割段、夹取段、竖直段和水平段。其中,切割段和夹取段相互垂直,且切割段位于外壳的外部。平行于切割段且位于外壳内部的竖直段以及平行于夹取段的水平段作为移动段。
[0045]
移动时,假定刀具组的初始位置位于竖直段底部,两个刀具组沿竖直段背向移动,之后进入至水平段,并沿水平段经进料口向输送中的麦冬移动,之后进入切割段,两个刀具组沿切割段相向移动直至到行程极限时,切断块根与茎的连接,或者在连接处/块根部上留有切口,同时块根位于相贴合的刀具组夹持,随后配合的刀具组沿夹取段移动并进入外壳内部,在移动过程中实现进一步分离,进入外壳后,刀具组再次进入竖直段相互远离,夹持
的块根部则在此时落入外壳内进行收集。
[0046]
在一个或多个实施例中,所述夹取段的长度大于所述切割段的长度。
[0047]
在部分实施例中,预设轨迹可以是包括有依次连接的切割段和夹取段的圆形、三角形、多边形或者不规则图形轨迹。
[0048]
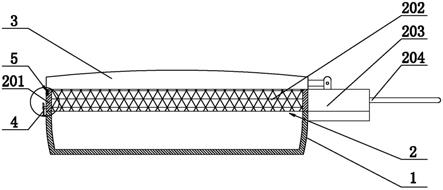
在部分实施例中,如图1所示,所述摘果机构组2下方设置有螺杆3,所述螺杆3用于将外壳1内的块根部经收集口11输送至外壳1的外部。在一个或多个实施例中,所述外壳的底面倾斜设置,靠近收集口的高度最高。
[0049]
相较于现有技术中通过拍打或切割的分离方式,本技术方案利用摘果机构组的控制机构驱动刀具组沿预设轨迹移动,并先后经过切割段和夹取段,实现了切割和夹取相结合的分离方式,对于块根部与麦冬茎的连接处易于割断的情况,能够在切割后夹持并输送块根部至外壳内部,对于块根部与麦冬茎的连接处韧性高、切割点位于块根上或者其他不易割断的情况,能够在切割形成切口后,进一步通过夹取拉扯而分离块根部,显著地提高了麦冬摘果效率和摘果率;此外,上下刀具组在配合过程中互为支撑,能够有效地避免块根部在被拍打或旋刀切割的过程中通过朝向反方向移动而卸力的情况,进一步提高摘果效果。
[0050]
实施例2:
[0051]
在实施例1的基础上,如图2至图7所示,控制机构包括第一驱动装置27和第一导向杆21,所述第一导向杆21上滑动设置有滑块23,所述滑块23上设置有与第一导向杆21相垂直的第二导向杆22,所述第二导向杆22上滑动设置有连杆28,所述连杆28连接至刀具组29,连杆28上铰链连接有推杆26,所述推杆26的外侧套设有转向块25,所述转向块25与第一驱动装置27的输出端连接,所述推杆26的外侧还套设有位于转向块25和连杆28之间的第一弹簧24。
[0052]
工作时,以上摘果机构为例,如图3所示,第一驱动装置带动转向块旋转,转向块改变推杆的方向,与推杆铰接的连杆在推杆的驱动下沿第二导向杆竖直向上沿竖直段移动,到达第二导向杆的行程上限时,转向块继续旋转,位于第二导向杆的行程上限的连杆带动第二导向杆沿第一导向杆完成水平段移动至第一导向杆的左侧行程极限,之后连杆在推杆的驱动下进入切割段,沿第二导向杆移动,在第二导向杆的行程下限处,刀具组相互配合切割,位于第二导向杆的行程下限的连杆带动第二导向杆沿第一导向杆向右移动,直至到达第一导向杆的右侧行程极限,刀具组此时完成夹取段的移动。以上,则完成一个矩形周期的旋转,依次类推,在第一驱动装置的驱动下,刀具组重复完成矩形运动轨迹以切割、夹取麦冬的块根部。
[0053]
在一个或多个实施例中,所述第一驱动装置为步进电机或伺服电机。
[0054]
在部分实施例中,如图2至图5所示,所述转向块25位于所述矩形运动轨迹内,所述转向块25靠近第二导向杆22的下端和第一导向杆21远离进料口的一端。对于该偏心矩形运动轨迹,工作时,进入切割段后,刀具组竖直向下的移动过程中,由于转向块距离切割段较远,第一弹簧处于自然状态或者伸长状态,刀具组所受第一弹簧的影响小,或者受一定程度的释能影响,两个刀具组能够正常或加速相向移动,以提高刀具组在根茎连接处的作用力,增强切割效果。
[0055]
在部分实施例中,如图6和图7所示,所述转向块25位于所述矩形运动轨迹内,所述转向块25靠近第二导向杆22的下端和第一导向杆21靠近进料口的一端。本实施例中,转向
块靠近矩形运动轨迹的切割段和夹取段之间的夹角处。工作时,进入切割段后,刀具组竖直向下移动的过程中,第一弹簧先逐渐压缩储能后逐渐伸长释能,在两个刀具组接触时,能够加速相对移动进而提高刀具组在根茎连接处的作用力,增强切割效果。随后,进入夹取段后,第一弹簧再次先逐渐压缩储能后逐渐伸长释能,在释能阶段,第一弹簧推动连杆快速沿夹取段移动,以施加逐渐增大的拉力,增强分离效果。该偏心结构能够同时实现切割段和夹取段的弹簧释能,利用第一弹簧的作用力对根茎连接处或切口施加逐渐变化的作用力,以在切割段有利于提高切割力,并在夹取段有利于提高拉力,显著地提高块根分离效果。
[0056]
实施例3:
[0057]
在上述实施例的基础上,如图8所示,所述刀具组29包括安装板291,所述安装板291上设置有若干切刀293,上、下两个刀具组29的切刀293相向移动并切割麦冬的块根部。
[0058]
安装板上并排设置有若干切刀,故在切割段的行程极限时,上下刀具组的切刀配合后能够同时切割输送链条的一段距离上的所有块根部,并在输送链条继续输送的过程中,依次经过夹取段、竖直段和水平段后,在另一段距离的麦冬再次移动至对应位置后,再次切割该段距离上的所有块根部。
[0059]
在部分实施例中,如图9所示,所述切刀293包括刀刃295和夹持槽296,在上、下切刀293配合时,所述夹持槽296用于夹取麦冬的块根部。切割完成后,无论是连接处断开或者是形成切口,配合的切刀均通过夹持槽形成夹持区域对其中的块根部进行夹持以拖动其沿夹取部移动,实现麦冬的夹取分离。
[0060]
在部分实施例中,如图9所示,沿夹持槽296靠近刀刃295的一端至夹持槽296远离刀刃295的一端的方向,所述夹持槽296的深度逐渐增加。上下两个夹持槽构成的锥形夹持区域的内径沿切割段至竖直段的方向逐渐增大,从而使块根部更加容易与麦冬的茎相分离,并在切刀相互远离后,从夹持槽中脱落。
[0061]
在部分实施例中,如图8所示,所述安装板291上设置有若干凹槽292,所述切刀293滑动设置于凹槽292内,切刀293与凹槽292一一对应,所述凹槽292内设置有第二弹簧294,所述第二弹簧294与切刀293连接。第二弹簧不仅能够复位切刀,而且在夹取不易分离的块根部时,切刀首先保持不动,安装板随着连杆向竖直段移动时,第二弹簧逐渐拉长并蓄力,块根部所受拉力不断增大,在大于阈值后随即与麦冬茎分离。结合偏心的矩形运动轨迹,第二弹簧能够在第一弹簧释能的过程中快速完成蓄力,从而产生瞬时冲力而显著提高分离效果。
[0062]
本文中所使用的“第一”、“第二”等(例如第一弹簧、第二弹簧,第一导向杆、第二导向杆等)只是为了描述清楚起见而对相应部件进行区别,不旨在限制任何次序或者强调重要性等。此外,在本文中使用的术语“连接”在不进行特别说明的情况下,可以是直接相连,也可以使经由其他部件间接相连。
[0063]
以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。