1.本实用新型属于制动器控制技术领域,具体是一种轮式拖拉机制动操纵机构。
背景技术:
2.随着轮式拖拉机的大面积普及,履带拖拉机相对于国内很多用户来讲,变得越来越陌生了。履带拖拉机的主要缺点是行走装置,如支重轮、导向轮、托带轮及履带板磨损较快,维修费用高,作业转场速度较慢,尤其是随着农村道路硬化的发展,金属履带拖拉机转移不便。但是,在农田作业方面,履带拖拉机因其转弯半径小,机动性方面较轮式拖拉机更好。这方面就需要对轮式拖拉机进行改进。
技术实现要素:
3.本实用新型的目的在于克服现有技术的缺陷,提供一种轮式拖拉机制动操纵机构。
4.为实现上述目的,本实用新型采用了如下技术方案:
5.一种轮式拖拉机制动操纵机构,包括左制动踏板和右制动踏板,所述左制动踏板通过左软轴拉线与第一左制动摇臂连接,所述第一左制动摇臂设置在转轴的一端,所述转轴的另一端设置第二左制动摇臂,所述第二左制动摇臂通过左拉杆与左制动器连接,所述右制动踏板通过右软轴拉线与右制动摇臂连接,所述右制动摇臂通过右拉杆与右制动器连接,所述右制动摇臂与所述转轴转动连接;所述左制动踏板上设有连接螺钉,所述右制动踏板上设有转动锁板,所述转动锁板上设有与所述连接螺钉配合的锁口。
6.进一步的,还包括驻车操纵杆,所述驻车操纵杆上设有一排驻车锁齿,所述右制动踏板上设有驻车锁销。
7.进一步的,所述转轴设置在底盘的底部。
8.进一步的,所述底盘上设有龙门架,所述龙门架上设有限位螺栓,所述左制动踏板上设有挡板,所述限位螺栓抵在所述挡板上。
9.进一步的,所述挡板的一侧设有制动传感器,所述制动传感器与制动信号灯连接。
10.进一步的,所述左制动踏板的上端设有左连接挂耳和左弹簧挂耳,所述左软轴拉线的一端与所述左连接挂耳连接,所述左弹簧挂耳通过复位弹簧与所述龙门架连接。
11.进一步的,所述右制动踏板的上端设有右连接挂耳和右弹簧挂耳,所述右软轴拉线的一端与所述右连接挂耳连接,所述右弹簧挂耳通过复位弹簧与所述龙门架连接。
12.本实用新型分别由左制动踏板连接左制动器、右制动踏板连接右制动器,当左制动踏板和右制动踏板联动时,带动两轮的制动器同时工作,完成制动刹车。当需要减小转弯半径时,解除联动,只需要单独操作左制动踏板或右制动踏板进行单边制动。
附图说明
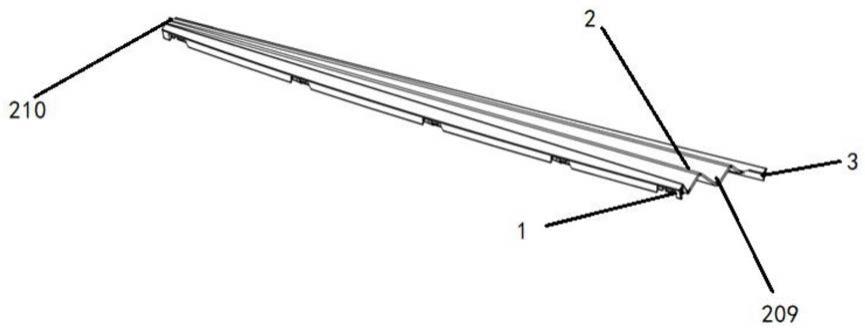
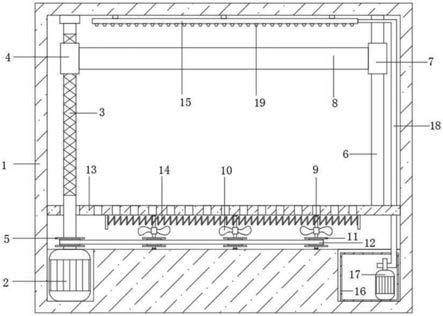
13.图1是本实用新型的结构示意图;
14.图2是右侧制动操纵机构的示意图;
15.图3是左制动踏板的示意图;
16.图4是右制动踏板的示意图。
具体实施方式
17.以下结合附图,进一步说明本实用新型的一种轮式拖拉机制动操纵机构的具体实施方式。本实用新型的一种轮式拖拉机制动操纵机构不限于以下实施例的描述。
18.实施例一:
19.参见图1、图3、图4,一种轮式拖拉机制动操纵机构,包括左制动踏板15和右制动踏板20,左制动踏板15通过左软轴拉线与第一左制动摇臂10连接,第一左制动摇臂10设置在转轴6的一端,转轴6的另一端设置第二左制动摇臂5,第二左制动摇臂5通过左拉杆2与左制动器1连接,右制动踏板20通过右软轴拉线13与右制动摇臂12连接,右制动摇臂12通过右拉杆9与右制动器8连接,右制动摇臂12与转轴6转动连接;左制动踏板上设有连接螺钉35,右制动踏板上设有转动锁板28,转动锁板上设有与连接螺钉配合的锁口。
20.参见图3,左制动踏板15包括左连接挂耳32、左弹簧挂耳31、挡板30、左踏板摇臂34、左轮毂33和左踏板36,左踏板摇臂34焊接在左轮毂33上,左踏板36焊接在左踏板摇臂34上,连接螺钉35固定在左踏板36上,左轮毂33通过踏板固定轴16与龙门架7安装,龙门架7固定在底盘3上。
21.参见图4,右制动踏板20包括右连接挂耳29、右弹簧挂耳23、右踏板摇臂25、右轮毂24和右踏板26,右踏板摇臂25焊接在右轮毂24上,右踏板26焊接在右踏板摇臂25上,转动锁板28通过锁紧螺钉27转动连接在右踏板26上,左制动踏板和右制动踏板通过转动锁板连接在一起,右轮毂24通过踏板固定轴16与龙门架7安装。
22.参见图1、图2,复位弹簧19一端挂接在左弹簧挂耳31和右弹簧挂耳23上,另一端挂接在龙门架7上。左连接挂耳32通过连接叉与左软轴拉线的一端连接,左软轴拉线的另一端通过连接叉11与第一左制动摇臂10连接,第二左制动摇臂5通过连接叉4和左拉杆2连接,左拉杆2与左制动器1连接。右连接挂耳29通过连接叉11与右软轴拉线13的一端连接,右软轴拉线的另一端通过连接叉与右制动摇臂12连接,右制动摇臂12通过连接叉4和右拉杆9连接,右拉杆9与右制动器8连接。第一左制动摇臂10和第二左制动摇臂5通过销轴固定在转轴6上,随转轴一起转动,右制动摇臂12与转轴6转动连接,并且在转轴上可以自由转动。
23.轮式拖拉机制动操纵机构的工作过程是:通过转动锁板28将左制动踏板15和右制动踏板20连接在一起,踩下左制动踏板或右制动踏板,左连接挂耳32和右连接挂耳29逆时针旋转带动左软轴拉线和右软轴拉线向上伸出,此时第一左制动摇臂10在左软轴拉线的作用下顺时针旋转,通过转轴6带动第二左制动摇臂5顺时针旋转,第二左制动摇臂5通过左拉杆2带动左制动器1工作。右制动摇臂12在右软轴拉线13的作用下顺时针旋转,通过右拉杆9带动右制动器8工作,完成制动刹车。释放左制动踏板或右制动踏板,在复位弹簧19的作用下,制动操纵机构恢复到初始状态。当需要减小转弯半径时,通过转动锁板断开左制动踏板和右制动踏板连接,只需要单独操作左制动踏板或右制动踏板进行单边制动,操作过程和双边制动一样。
24.现有技术中,制动踏板通过拉杆与制动摇臂连接,限制制动踏板的安装位置。本实
用新型中制动踏板通过软轴拉线与制动摇臂连接,可以使制动踏板的安装位置适应复杂的空间变化。
25.参见图1、图2,在本实施例中,还包括驻车操纵杆14,驻车操纵杆上设有一排驻车锁齿,右制动踏板20上设有驻车锁销21。驻车操纵杆14通过螺栓与摩擦片22固定在龙门架7上,并且可以摩擦转动。驻车锁销21连接在右踏板摇臂25上并通过螺母锁紧。本实用新型中驻车操纵机构相对于手刹和软轴拉线相结合的布置结构,结构更简单,成本更低。
26.在本实施例中,转轴6设置在底盘3的底部。现有技术中将转轴设置在底盘与驾驶室之间,维修时需要打开驾驶室地板才能接触到转轴,非常不方便。本实用新型的转轴设置在底盘的底部,维修时钻到拖拉机底下即可进行维修。
27.在本实施例中,龙门架7上设有限位螺栓18,所述限位螺栓抵在左制动踏板15的挡板30上。通过旋转限位螺栓可以调节左制动踏板和右制动踏板的初始位置,以适应不同身高的驾驶员,提高舒适度。
28.在本实施例中,挡板30的一侧设有制动传感器17,制动传感器17与制动信号灯连接。制动传感器17通过螺母固定在龙门架7上。踩下制动踏板,挡板30远离制动传感器17,制动传感器发送亮灯控制信号,制动信号灯点亮。反之,制动信号灯熄灭。
29.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。