1.本发明涉及半导体器件的生产检测领域,特别涉及一种半导体器件的中转平台。
背景技术:
2.对于半导体器件的分装或运输大多采用自吸附盒装载,自吸附盒因其内部的胶膜结构,当半导体器件放置于盒内后,可自动将半导体器件进行吸附,所以即使运输过程中盒体晃动、颠簸半导体器件也不会产生位移。其中申请号为201820805488.9的中国实用新型专利,公开了一种自吸附芯片包装盒,该自吸附盒内的载盘上设有通气道和吸气孔,利用抽气泵从吸气孔处将通气道内的气体向外抽出,使得未与凸起接触的部分硅胶膜向通气道内塌陷,减小了硅胶膜与芯片的接触面积,使得硅胶膜对芯片的附着力减小,从而便于用户使用吸笔将芯片向上吸起脱离硅胶膜,当取消抽气状态后,硅胶膜在自身弹性作用下恢复到平整状态,这时硅胶膜恢复对芯片的良好附着力,从而便于下次使用。
3.所以将半导体器件放置于载盘上具有较好的便捷性,特别是对半导体器件进行批量操作时(测试或封装),需要中转平台承载载盘,通过中转平台便于上一工序的机械手抓取和移除载盘、以及下一工序的机械手抓取和移除半导体器件,由于多数机械手抓取动作是固定的,所以需要一种新的中转平台适用上下工序机械手的衔接。
技术实现要素:
4.本实用新型为了克服现有技术的缺点,提供一种用于半导体器件的中转平台,对半导体器件进行批量操作时(测试或封装),通过水平移动机构将载盘和半导体器件移动至上下工序机械手的固定位置,适用于上下工序的衔接。
5.本实用新型的一种半导体器件的中转平台,包括水平移动机构、吸附板、控制器、控制阀和真空发生器,所述吸附板固定安装于水平移动机构上方,所述吸附板上设有用于吸附载盘的吸附单元,所述吸附单元位于载盘的吸气孔下方,所述吸附单元依次与控制阀和真空发生器连通,所述控制器与控制阀的控制端电连接,所述控制器用于控制控制阀供吸附单元对载盘吸附和释放。
6.进一步地,所述吸附单元包括设于吸附板顶面的吸附孔,所述吸附孔的外周设有环形的密封件,所述吸附板的侧面设有与吸附孔连通的气管安装孔。
7.进一步优选地,所述密封件为圆环形。
8.进一步地,所述吸附孔的横向截面为十字型。
9.更进一步地,所述控制阀和吸附单元均为多个,一个所述控制阀对应控制一个吸附单元。
10.进一步地,所述水平移动机构包括x轴、y轴和a轴,所述x轴用于驱动吸附板水平横向移动,所述y轴用于驱动吸附板水平纵向移动,所述a轴用于驱动吸附板水平旋转移动。
11.进一步地,所述a轴的顶部与吸附板固定连接,所述a轴的底部与y轴的顶部连接,所述y轴的底部与x轴的顶部连接,所述a轴驱动吸附板水平旋转的角度为
±
20
°
。
12.进一步地,还包括载盘位置传感器,所述载盘位置传感器与控制器电连接,所述吸附板上设有传感器槽,所述载盘位置传感器安装于传感器槽内。
13.本实用新型用于半导体器件的中转平台具有以下优点:
14.1、通过吸附板上的吸附单元再对载盘吸附固定的同时,载盘上的硅胶膜也被吸附,便于下一工序的机械手抓取载盘上的半导体器件。
15.2、吸附板上设置多个吸附单元且分别进行控制,保证吸附板上可实现持续具有载盘被吸附,进而保证中转平台持续具有半导体器供应至下一工序。
附图说明
16.图1为载盘的结构示意图;
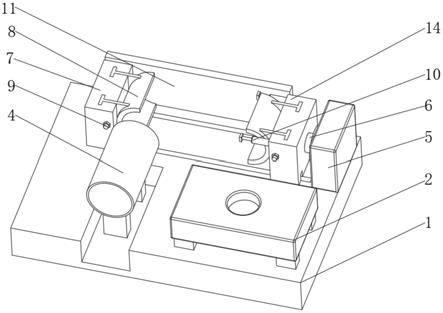
17.图2为实施例2中半导体器件的中转平台的结构示意图;
18.图3为实施例2中吸附板的结构示意图。
19.其中,1
‑
水平移动机构、2
‑
吸附板、3
‑
吸附单元、4
‑
吸气孔、5
‑
吸附孔、6
‑
密封件、7
‑
气管安装孔、8
‑
x轴、9
‑
y轴、10
‑
a轴、11
‑
传感器槽、12载盘。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,均属于本发明保护的范围。
21.实施例1:
22.一种半导体器件的中转平台,包括水平移动机构、吸附板、控制器、控制阀和真空发生器,所述吸附板固定安装于水平移动机构上方,所述吸附板上设有用于吸附载盘的吸附单元,所述吸附单元位于载盘的吸气孔下方,所述吸附单元依次与控制阀和真空发生器连通,所述控制器与控制阀的控制端电连接,所述控制器用于控制控制阀供吸附单元对载盘吸附和释放。
23.所述吸附单元包括设于吸附板顶面的吸附孔,所述吸附孔的外周设有环形的密封件,所述吸附板的侧面设有与吸附孔连通的气管安装孔。
24.所述密封件为距形,可选用条形密封件,吸附板顶面加工密封件槽后,将条形密封件安装至密封件槽内;所述吸附孔的横向截面为圆形。
25.所述水平移动机构包括x轴、y轴和a轴,所述x轴用于驱动吸附板水平横向移动,所述y轴用于驱动吸附板水平纵向移动,所述a轴用于驱动吸附板水平旋转移动。通过水平移动机构实现对吸附板的移动,当上一工序需放置载盘至吸附板时,水平移动机构移动至上一工序机械手的相应位置,以备上一工序将载盘抓取后放置吸附板上,载盘放置吸附板上后,控制器发出指令使控制阀吸合,吸附孔与真空发生器连通,载盘的底部被吸附至与吸附板的上表面贴合,同时载盘的硅胶膜也由吸气孔被吸附,便于下一工序的机械手抓取载盘内的半导体器件;下一工序的机械手需抓取载盘中的半导体器件时,水平移动机构移动至下一工序机械手的相应位置,以备下一工序将半导体器件抓取或放置载盘内。
26.所述a轴的顶部与吸附板固定连接,所述a轴的底部与y轴的顶部连接,所述y轴的
底部与x轴的顶部连接,所述a轴驱动吸附板水平旋转的角度为
±
10
°
。
27.实施例2
28.如图1
‑
3所示,一种半导体器件的中转平台,包括水平移动机构、吸附板、控制器、控制阀和真空发生器,所述吸附板固定安装于水平移动机构上方,所述吸附板上设有用于吸附载盘的吸附单元,所述吸附单元位于载盘的吸气孔下方,所述吸附单元依次与控制阀和真空发生器连通,所述控制器与控制阀的控制端电连接,所述控制器用于控制控制阀供吸附单元对载盘吸附和释放。所述控制阀和吸附单元均为两个,一个所述控制阀对应控制一个吸附单元,即控制阀对吸附单元一一对应控制吸附和释放。
29.所述吸附单元包括设于吸附板顶面的吸附孔,所述吸附孔的外周设有环形的密封件,所述吸附板的侧面设有与吸附孔连通的气管安装孔。密封件选用硅胶材质,气管安装孔设置于吸附板的侧面便于加工,气管不与吸附板的顶面产生干涉。
30.所述密封件为圆环形,吸附板顶面加工密封件槽后,密封件选用现有的o型密封圈,密封件安装至密封件槽内以后,密封件凸出吸附板上表面0.2mm。所述吸附孔的横向截面为十字型,吸附孔的宽度为5mm,利于更大的吸附面积与载盘的底部吸附贴合。
31.所述水平移动机构包括x轴、y轴和a轴,所述x轴用于驱动吸附板水平横向移动,所述y轴用于驱动吸附板水平纵向移动,所述a轴用于驱动吸附板水平旋转移动。
32.所述a轴的顶部与吸附板固定连接,所述a轴的底部与y轴的顶部连接,所述y轴的底部与x轴的顶部连接,所述a轴驱动吸附板水平旋转的角度为
±
20
°
。通过x轴、y轴和a轴可实现半导体器件的精确定位,当半导体器件放置于载盘中位置出现偏差时,通过水平移动机构对半导体器件进行找正,便于下一工序的机械手进行抓取,其中找正的移动量可通过测量机构对半导体器件的位置进行测量,本实施例中测量机构为相机,相机位于吸附板的上方,对半导体器件拍照识别,以确定半导体器件的位置偏移量,找正后的半导体器件与x轴、y轴正交。
33.还包括载盘位置传感器,所述载盘位置传感器与控制器电连接,所述吸附板上设有传感器槽,所述载盘位置传感器安装于传感器槽内。通过载盘位置传感器使控制器进一步自动判断载盘是否放置于吸附板上,提高中转平台的可靠性。
34.实施例3
35.本实施例与实施例2的不同之处在于:
36.吸附单元包括第一吸附孔和第二吸附孔,第一吸附孔用于吸附固定载盘底部,第二吸附孔用于吸附载盘的吸气孔,第一吸附孔和第二吸附孔分别与控制阀连接,由控制器分别控制吸附固定载盘、吸附吸气孔,同样可达到本实用新型的效果。
37.其余内容与实施例2相同。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。