1.本实用新型涉及机械旋转机构领域,具体地讲,涉及一种基于蜗轮蜗杆传动的机械转动装置。
背景技术:
2.美国白蛾是一种世界性的检疫害虫,自传入我国以来,对植物产生很大危害。其中在幼龄时期吐丝结网,对植物的危害性最大,故在其幼龄时期对其网幕进行治理会有很好的效果。
3.目前治理白蛾网幕的方法主要有人工摘除和化学药剂大规模喷洒的治理方法。但人工摘除的方法需要大量的劳动力,且效果不好;大面积喷洒化学药剂会污染环境。为解决这些问题,精准对靶喷药机器人应运而生。
4.但对于现有的喷药机器人来说,是以摄像头中心为基础建立坐标系,根据摄像头拍摄到的网幕轮廓在此基础之上进行伺服控制的。但由于摄像头的中心位置与喷头的中心位置不重合,无法实现即看即喷,必须通过空间坐标转化及伺服控制,将喷头移动到摄像头原位置才可实现精准喷药,设计过程繁琐,实时性受到影响,所以通过一种简单机械装置实现喷头中心与摄像头中心重合,对于提高机器人的实时性及操作简便性有十分重要的意义。此为,现有技术的不足之处。
技术实现要素:
5.本实用新型要解决的技术问题是提供一种基于蜗轮蜗杆传动的机械转动装置,有利于实现通过机械装置的简单运动来替换繁琐的空间坐标转换及伺服控制,实现伺服控制程序的优化,提高对靶喷药的实时性和精确度。
6.本实用新型采用如下技术方案实现发明目的:
7.一种基于蜗轮蜗杆传动的机械转动装置,包括下支撑座,其特征是:所述下支撑座一端固定连接蜗杆轴承,所述下支撑座另一端固定连接步进电机,所述蜗杆轴承的内圈固定连接蜗杆的一端,所述蜗杆的另一端固定连接联轴器,所述联轴器固定连接所述步进电机的输出轴,所述下支撑座螺纹连接下支撑座连接部分,所述蜗杆啮合蜗轮,所述蜗轮固定连接对称的支撑柱,所述蜗轮轴承连接蜗轮轴承连接部分,螺纹杆螺纹连接上支撑座,所述上支撑座设置有对称的定位槽。
8.作为本技术方案的进一步限定,所述螺纹杆包括定位件连接部分、上支撑座连接部分、蜗轮轴承连接部分、下支撑座连接部分及定位件固定螺母连接部分。
9.作为本技术方案的进一步限定,所述下支撑座连接部分螺纹连接所述下支撑座。
10.作为本技术方案的进一步限定,所述上支撑座连接部分螺纹连接所述上支撑座。
11.作为本技术方案的进一步限定,所述定位件连接部分安装有定位件,所述定位件下端面上设置有对称的凹槽,所述螺纹杆设置有对称的凸起,对称的所述凹槽匹配对称的所述凸起,所述定位件由固定定位件螺母固定连接在所述的定位件连接部分,所述固定定
位件螺母螺纹连接所述定位件固定螺母连接部分。
12.作为本技术方案的进一步限定,所述支撑柱分别在中心位置设置有螺纹孔,通过螺栓与所述蜗轮实现连接,所述支撑柱分别匹配对应的所述定位槽。
13.作为本技术方案的进一步限定,所述上支撑座螺栓连接对称的支撑架,一个所述支撑架固定连接摄像头,另一个所述支撑架固定连接喷头,所述上支撑座固定连接传感器。
14.与现有技术相比,本实用新型的优点和积极效果是:
15.(1)实现结构简单、控制精度高、成本低与重量轻的优点;
16.(2)结构简单,制作方便,通过机械装置的简单运动来替换繁琐的空间坐标转换及伺服控制,实现伺服控制程序的优化,提高对靶喷药的实时性和精确度;
17.(3)摄像头和喷头的旋转交换位置可以减少药液对摄像头等电子部件的污染损害。
18.本实用新型为基于蜗轮蜗杆传动的机械转动装置,有利于实现通过机械装置的简单运动来替换繁琐的空间坐标转换及伺服控制,实现伺服控制程序的优化,提高对靶喷药的实时性和精确度。
附图说明
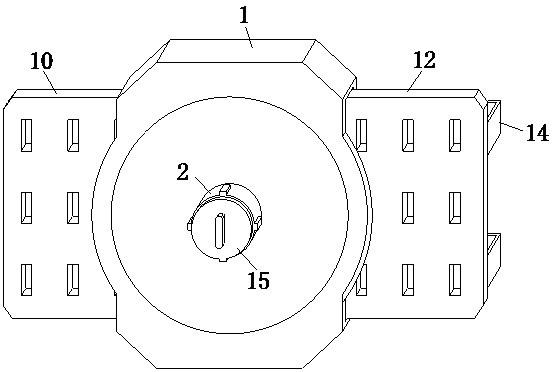
19.图1为本实用新型的立体结构示意图。
20.图2为本实用新型的螺纹杆部件的结构示意图。
21.图3为本实用新型的上支撑座的正转,反转的定位装置的结构示意图。
22.图4为本实用新型的上支撑座的下端面示意图。
23.图5为本实用新型的定位件的下端面示意图。
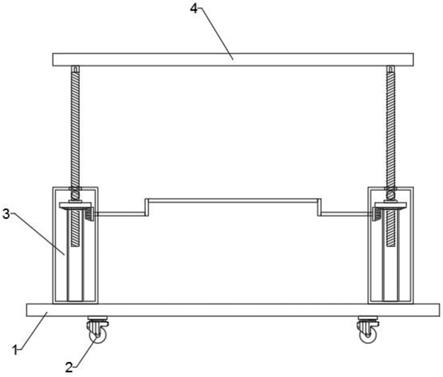
24.图6为本实用新型的正视图。
25.图中:1、下支撑座,2、蜗杆,3、蜗杆轴承,4、传感器,5、支撑架,6、摄像头,7、上支撑座,8、定位件,9、螺纹杆,10、固定定位件螺母,11、喷头,12、蜗轮,13、步进电机,14、联轴器,15、定位件连接部分,16、上支撑座连接部分,17、蜗轮轴承连接部分,18、下支撑座连接部分,19、定位件固定螺母连接部分,20、凸起,21、支撑柱,22、定位槽,23、凹槽。
具体实施方式
26.下面结合附图,对本实用新型的一个具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
27.如图1
‑
图6所示,本实用新型包括下支撑座1,所述下支撑座1一端固定连接蜗杆轴承3,所述下支撑座1另一端固定连接步进电机13,所述蜗杆轴承3 的内圈固定连接蜗杆2的一端,所述蜗杆2的另一端固定连接联轴器14,所述联轴器14固定连接所述步进电机13的输出轴,所述下支撑座1螺纹连接下支撑座连接部分18,所述蜗杆2啮合蜗轮12,所述蜗轮12固定连接对称的支撑柱21,所述蜗轮12轴承连接蜗轮轴承连接部分17,螺纹杆9螺纹连接上支撑座7,所述上支撑座7设置有对称的定位槽22。
28.所述螺纹杆9包括定位件连接部分15、上支撑座连接部分16、蜗轮轴承连接部分17、下支撑座连接部分18及定位件固定螺母连接部分19。
29.所述下支撑座连接部分18螺纹连接所述下支撑座1。
30.所述上支撑座连接部分16螺纹连接所述上支撑座7。
31.所述定位件连接部分15安装有定位件8,所述定位件8下端面上设置有对称的凹槽23,所述螺纹杆9设置有对称的凸起20,对称的所述凹槽23匹配对称的所述凸起20,所述定位件8由固定定位件螺母10固定连接在所述的定位件连接部分15,所述固定定位件螺母10螺纹连接所述定位件固定螺母连接部分 19。
32.所述支撑柱21分别在中心位置设置有螺纹孔,通过螺栓与所述蜗轮12实现连接,所述支撑柱21分别匹配对应的所述定位槽22。
33.所述上支撑座7螺栓连接对称的支撑架5,一个所述支撑架5固定连接摄像头6,另一个所述支撑架5固定连接喷头11,所述上支撑座7固定连接传感器4。
34.本实用新型工作流程为:下支撑座1端面上安装有与导轨连接的装置。利用步进电机13带动蜗杆2及蜗轮12的旋转带动上支撑座7的转动来实现摄像头6与喷头11的循环往复的位置变换过程。在步进电机13通入正脉冲的过程中,步进电机13带动蜗杆2转动,从而带动蜗轮12转动,在蜗轮12转动的过程中,其端面上的支撑柱21由于与上支撑座7的凹槽23啮合,带动上支撑座7 随着蜗轮12一起转动,上支撑座7在转动过程中还会上升半个螺距,故在安装摄像头6与喷头11时,摄像头6的中心要高于喷头11中心半个螺距的高度。通入一定量的脉冲电流使上支撑座7旋转180度时,通过程序停止通入脉冲。由于定位件8的下端面与上支撑座7中间部位的上端面的距离为半个螺距,所以上支撑座旋转180度后,这两个端面会充分接触,使上支撑座7停止转动,保持定位精度,从而实现喷头11中心与摄像头6中心的重合;步进电机13通入负脉冲的过程中,蜗轮12上的支撑柱21带着上支撑座7反转下降,使上支撑座7回到原位置。
35.以上公开的仅为本实用新型的一个具体实施例,但是,本实用新型并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。